Спосіб вимірювання фізичних величин
Номер патенту: 47143
Опубліковано: 17.06.2002
Автори: Балабанова Тетяна Василівна, Збруцький Олександр Васильович, Балабанов Ігор Валерійович, ТРОНЬ ЮРІЙ ОПАНАСОВИЧ
Формула / Реферат
Спосіб вимірювання фізичних величин шляхом перетворення вимірювальної фізичної величини в n каналах, вимірювання перетворених сигналів і послідовної математичної обробки цих сигналів, який відрізняється тим, що фізична величина, яка подається на вхід перетворювача 1-го канала формується як алгебраїчна сума вимірювальної фізичної величини і фізичних величин, пропорційних сигналам на виходах перетворювачів 2-го, 3-го,..., n-го каналів, фізична величина, яка подається на вхід перетворювача 2-го каналу формується як алгебраїчна сума вимірювальної фізичної величини і фізичних величин, пропорційних сигналам на виходах перетворювачів 1-го, 3-го,..., n-го каналів, фізична величина, яка подається на вхід перетворювача n-m-го каналу формується як алгебраїчна сума вимірювальної фізичної величини і фізичних величин, пропорційних сигналам на виходах перетворювачів 1-го, 2-го, n-m-1-го, n-m+1-го..., n-го каналів, фізична величина, яка подається на вхід n-го перетворювача формується як алгебраїчна сума вимірювальної фізичної величини і фізичних величин, пропорційних сигналам на виходах перетворювачів 1-го, 2-го,..., n-1-го каналів, а вимірювальна фізична величина![]() визначається з рівняння
визначається з рівняння
![]()
де
![]() - сигнал на виходах вимірювальних перетворювачів;
- сигнал на виходах вимірювальних перетворювачів;
n - число каналів перетворення;
![]() - постійний коефіцієнт.
- постійний коефіцієнт.
Текст
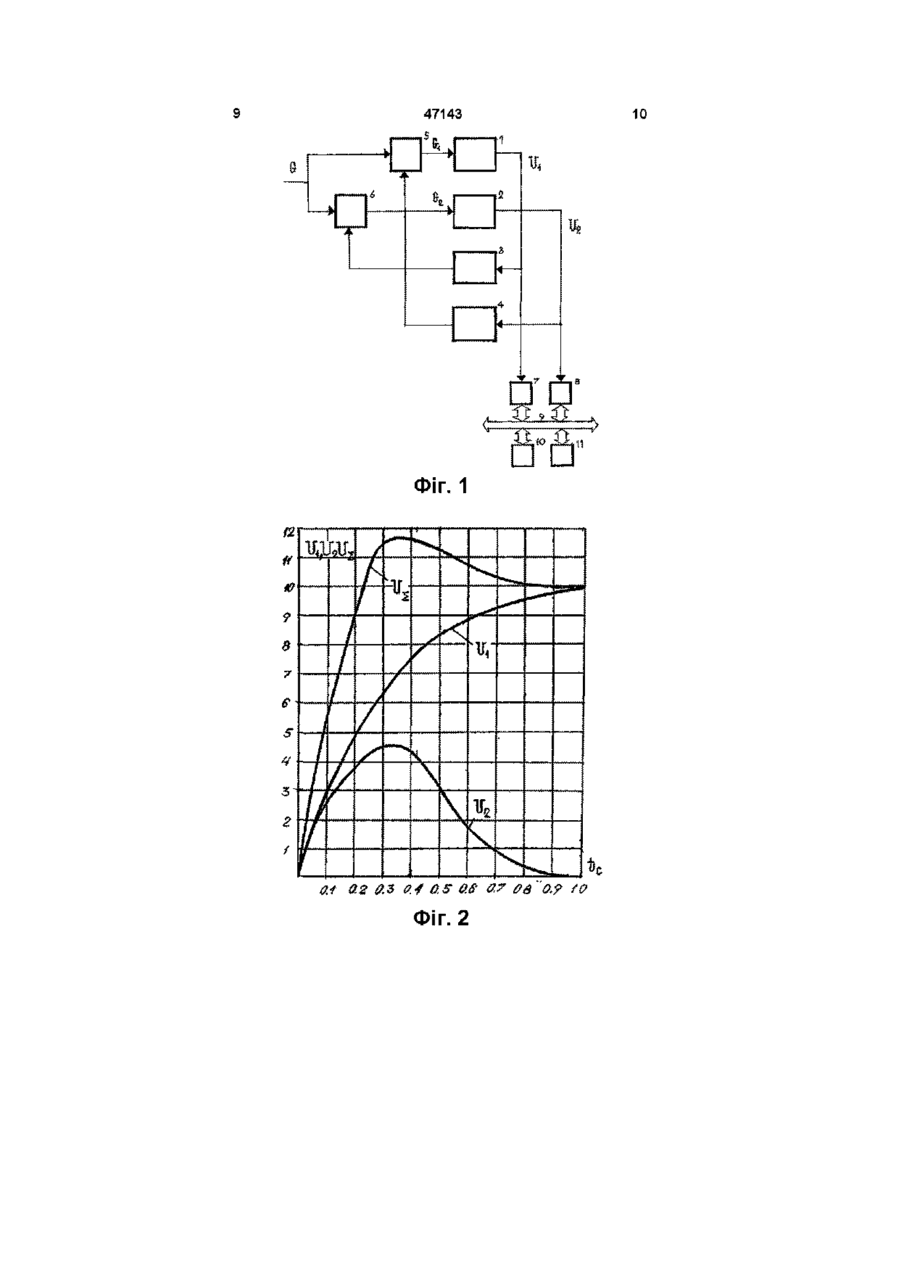
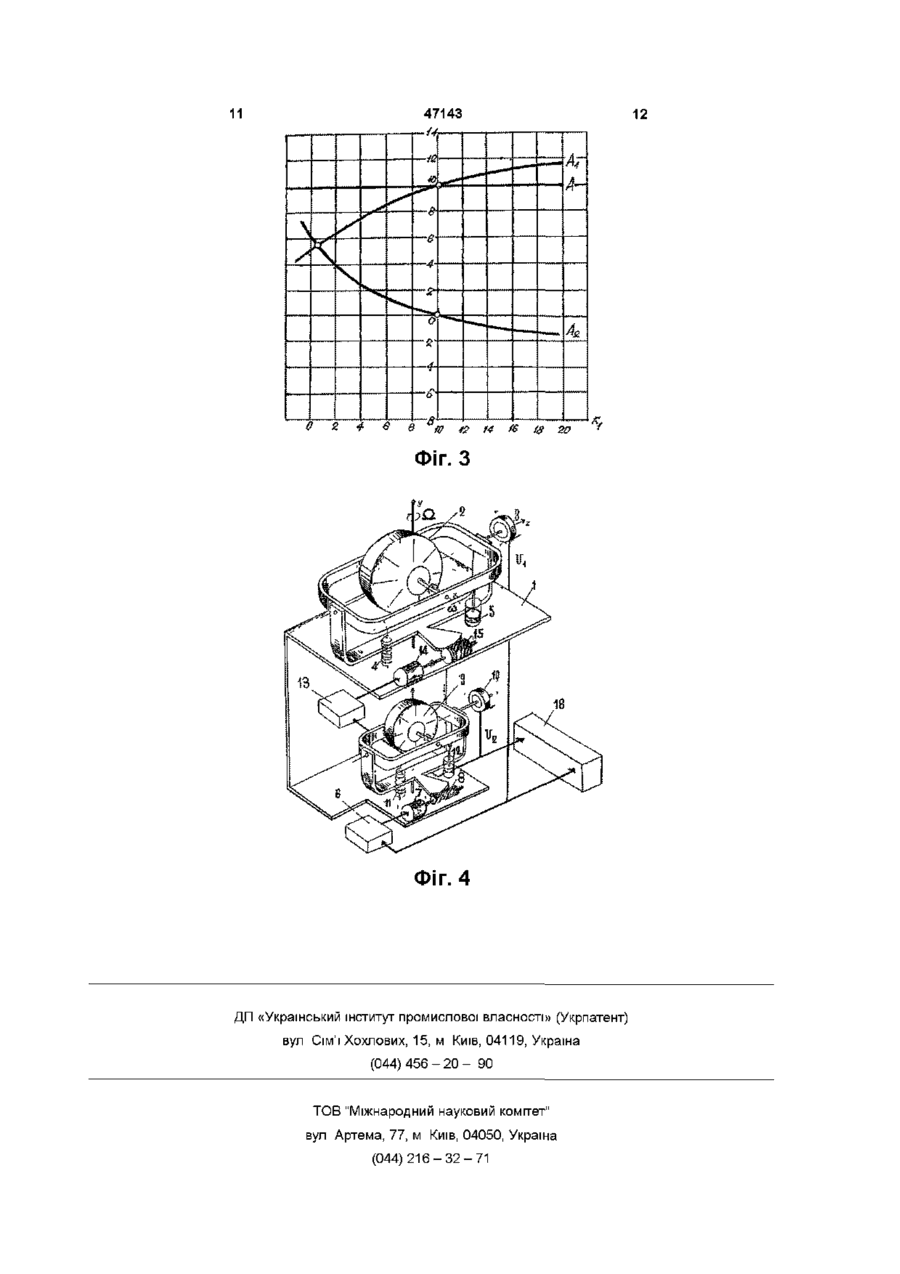
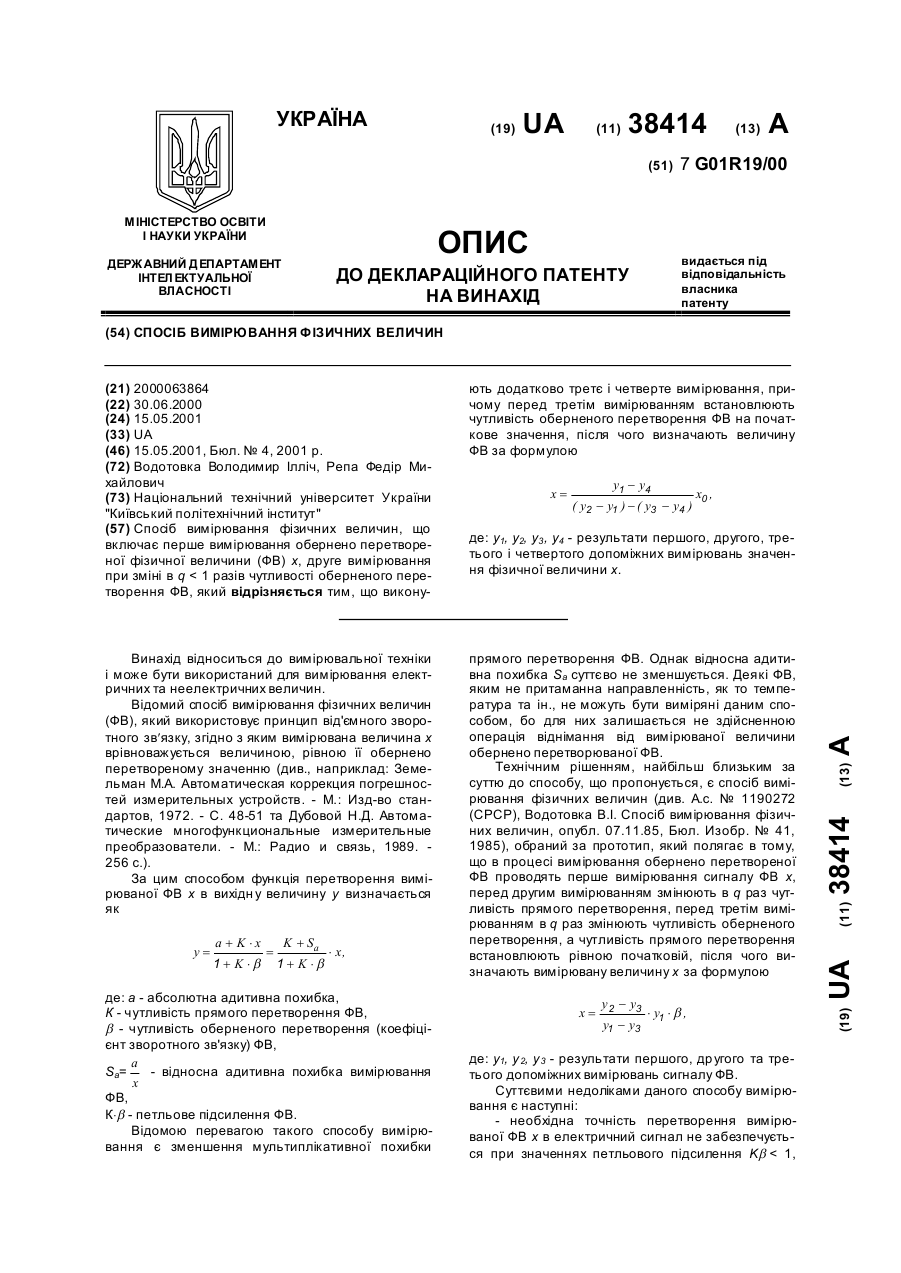
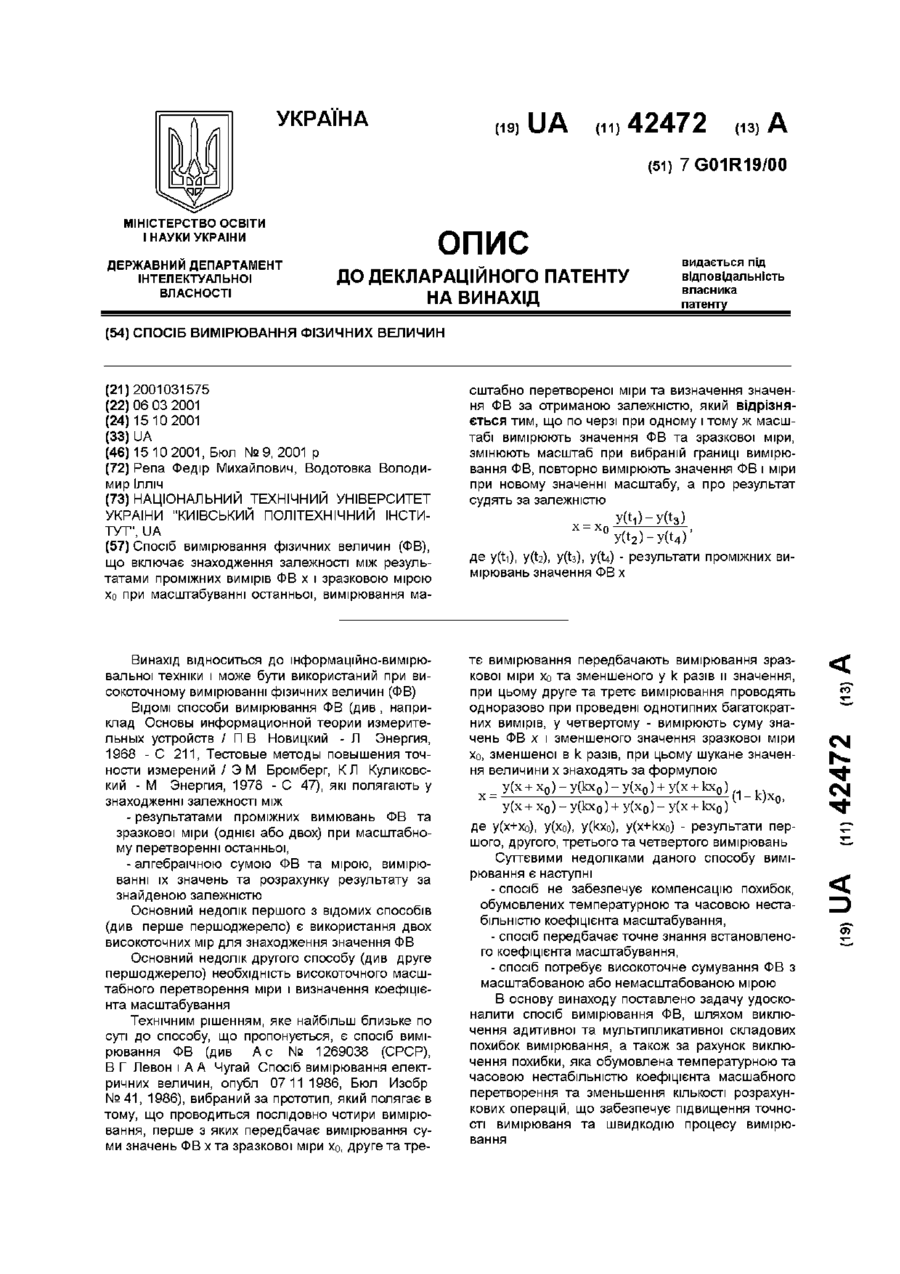
Спосіб вимірювання фізичних величин шляхом перетворення вимірювальної фізичної величини в п каналах, вимірювання перетворених сигналів і послідовної математичної обробки цих сигналів, який відрізняється тим, що фізична величина, яка подається на вхід перетворювача 1го канала формується як алгебраїчна сума вимірювальної фізичної величини і фізичних величин, пропорційних сигналам на виходах перетворювачів 2-го, 3-го, , n-го каналів, фізична величина, яка подається на вхід перетворювача 2го каналу формується як алгебраїчна сума вимірювальної фізичної величини і фізичних величин, пропорційних сигналам на виходах перетворювачів 1-го, 3-го, , n-го каналів, фізична величина, яка подається на вхід перетворювача пт-го каналу формується як алгебраїчна сума вимірювальної фізичної величини і фізичних величин, пропорційних сигналам на виходах перетворювачів 1-го, 2-го, n-m-1-го, n-m+1-го , пго каналів, фізична величина, яка подається на вхід n-го перетворювача формується як алгебраїчна сума вимірювальної фізичної величини і фізичних величин, пропорційних сигналам на виходах перетворювачів 1-го, 2-го, , n-1-го каналів, а вимірювальна фізична величина G визначається з рівняння G= (n-V)K Де Ui,U2,...,Un- сигнал на виходах перетворювачів, п - число каналів перетворення, К- постійний коефіцієнт вимірювальних ГО Винахід відноситься до вимірювальної техніки і може бути використаний для вимірювання фізичних величин (ФВ) різної фізичної природи Відомий спосіб вимірювання ФВ шляхом перетворення вимірювальної ФВ в електричний сигнал з використанням вимірювального перетворювача [1] Недоліками відомого способа є низькі швидкодія та точність вимірювання ФВ Найбільш близьким по технічній сутності (прототип) є спосіб вимірювання ФВ шляхом використання п каналів перетворення вимірювальної ФВ в електричний сигнал, вимірювання перетворених сигналів з послідовною математичною обробкою електричних сигналів, наприклад, складання та ділення на число використаних каналів перетворення [2] Недоліками прототипа є низькі швидкодія та точність вимірювання ФВ, які пов'язані з прагненням звести п канальну систему до одноканальної Задачею винаходу є підвищення точності вимірювання при параметричних збудженнях каналів перетворювання, а також швидкодії процесу вимірювання Поставлена задача досягається тим, що ФВ, яка подається на вхід перетворювача 1-го каналу, формується як алгебраїчна сума вимірювальної ФВ та ФВ, пропорційних сигналам на виходах 2-го, 3-го, , n-го каналів перетворювання, ФВ, яка подається на вхід перетворювача 2-го каналу, формується як алгебраїчна сума вимірювальної ФВ та ФВ, пропорційних сигналам на виходах 1-го, 3-го, , п -го каналів перетворювання, ФВ, яка подається на вхід n-m-го перетворювача, формується як алгебраїчна сума 1-го, 2-го, , п-го каналів перетворювання, ФВ, яка подається на 47143 вхід n-го перетворювача, формується як алгебраїчна різниця вимірювальної ФВ і ФВ, пропорційних сигналам на виходах 1-го, 2-го, п1-го каналів перетворювання, а вимірювальна ФВ визначається згідно рівняння G = де G - вимірювальна ФВ, Ui, U2, , U n - сигнали на виходах 1-го, 2-го, , n-го перетворювачів, К - коефіцієнт перетворювання одного каналу, п - КІЛЬКІСТЬ каналів перетворювання На фіг 1, як приклад, подана структурна схема 2-х канальної вимірювальної системи по заявленому способу Структурна схема містить вимірювальні перетворювачі 1-го та 2-го каналів 1 і 2, рефлексивні зв'язки 3 і 4, суматори 5 і 6, пристрої ввода сигналів (АЦП) 7 і 8, інтерфейс 9, процесор 10, відеопристрій 11 Елементи 7 - 1 1 утворюють у сукупності мікроконтролер Спосіб здійснюється наступним чином Нехай функція перетворення 1-го каналу має вигляд Ui=Wi(S)G (1) де Gi - ФВ, що подається на вхід перетворювача 1-го каналу, Ui - сигнал на виході перетворювача 1-го каналу, Wi(S) - передаточна функція перетворювача 1-го каналу Функція перетворення 2-го каналу має вигляд U 2 =W 2 (S)G (2) де G 2 - ФВ, що подається на вхід перетворювача 2-го каналу, ІІ2 - сигнал на виході перетворювача 2-го каналу, W2(S) - передаточна функція перетворювача 2-го каналу ВІДПОВІДНО заявленому способу для 2-х канальної системи ФВ Gi, яка подається на вхід перетворювача 1 -го каналу, формується Розв'язок цієї системи приводить до системи 2-х рівнянь, параметрично зв'язаних відносно вимірювальної ФВ, (1 + Wi(s)W 2 (s)pip 2 )Ui = Wi(s)(1 + W 2 (s)p 2 )G (8) (1 + Wi(s)W 2 (s)pip 2 )U 2 = W 2 (s)(1 - Wi(s)pi)G (9) Для доказу переваг заявленого способа наведемо розрахунковий приклад Нехай передаточні функції вимірювальних перетворювачів 1-го та 2-го каналів відповідають наступним виразам К 10 W|(s) = T T l T = ^ r ^ (Ю) a.,s + 1 0,5s+ 1 10 К2 (11) a->s + 1 0,5s+ 1 Тоді, ВІДПОВІДНО (8) і (9), будемо мати a i a i s 2 + (аі + a 2 )s +1 + K i K 2 p i p 2 U i = ais + Кі(1 + K 2 p 2 ))G (12) a i a i s 2 + (аі + a 2 )s +1 + K i K 2 p i p 2 U 2 = a 2 s K 2 (1 + K 1 p 1 ))G (13) При виконанні умови К-іРі = 1, що досягається при значенні р = 0,1, рівняння (12) - (13) приводяться до наступного вигляду 2 + (аі + a 2 )s +1 + K 2 p 2 Ui = ais + Кі(1 + K 2 p 2 ))G (14) a i a 2 s 2 + (аі + a 2 )s +1 + K 2 p 2 U 2 = a 2 sG (15) Після підстановки числових значень при р 2 = 0,05 отримаємо наступні рівняння, (s 2 + 4s + 1,5)Ui = (2s + 15)G (16) (s 2 + 4s + 1,5)U 2 = 2sG (17) Корені характеристичного рівняння s 2 + 4s +1,5 = 0 будуть si = -3,581, s 2 = -0,419 Тоді перехідні процеси будуть відповідати наступним рівнянням Ui(t) = 10(1 - 1 3 3 3 е 3 5 8 1 ' + 0 , З З З е 0 4 1 9 1 ) (18) U2(t) = 1 0 ( e 0 4 1 ^ - e 3 5 8 1 t ) (19) Числові значення отриманих перехідних процесів наведені в таблиці 1 і показані на фіг 2 W 2 (s) = ВІДПОВІДНО з рівнянням С!=С + и2р2 (3) де G - вимірювальна ФВ, р 2 - коефіцієнт рефлексивного зв'язку, який визначається блоком 4, Далі, ФВ G 2 , яка подається на вхід перетворювача 2-го каналу, формується ВІДПОВІДНО рівнянню О2=О-ііф, (4) де Рі - коефіцієнт рефлексивного зв'язку, який визначається блоком З ВІДПОВІДНО рівнянням (1) - (4) можна отримати наступну систему 2-х координатно взаємозв'язаних рівнянь відносно вимірювальної ФВ Ui - W i ( s ) p 2 U 2 = Wi(s)G (5) -W 2 (s)piUi + U 2 = W 2 (s)G (6) Нижче приведена матрична форма цієї системи 1 -W2(s)P1 UH W2(s) U) t U1 и2 и3 0,1 3,0 2,3 5,3 0,2 5,0 3,8 8,8 0,3 6,4 5,5 11,9 0,4 7,6 4,2 11,8 0,5 8,4 3,0 11,4 Вигляд цих процесів свідчить про те, що перехідний процес в 1-му каналі відповідає аперіодичній ланці, в той же час перехідний процес в 2-му каналі відповідає диференційній ланці, що дозволяє реалізувати сумарний перехідний процес U i (t) = U-i(t) + U 2 (t) з більшою швидкодією При цьому, в статичних режимах 2-х канальна система поводить себе як 1 -но канальна Розглянемо статичний режим системи, при якому відбувається вимірювання ФВ Сумарний коефіцієнт перетворення ФВ в сигнали Ui і U 2 відповідає наступному рівнянню А= А 1 + А 2 = де (20) К2 ВІДПОВІДНО коефіцієнти 0,6 8,9 1,8 10,07 47143 перетворення 1-го та 2-го каналів, які визначаються блоками 1 і 2, фіг 1 Аі і Аг - результуючі коефіцієнти перетворення по 1-му та 2-му каналам в складі рефлексивної вимірювальної системи Нехай будуть значення коефіцієнтів К-і = К 2 = 10, Рі = 0,1, р 2 - 0,5, а вимірювальна ФВ дорівнює G = 5 Тоді результуючий коефіцієнт перетворення 2х канальної системи дорівнює А = 10 і ВІДПОВІДНО U I = 50, U 2 = 0 , G = 50/10 = 5 Розглянемо, як поводить себе сумарний коефіцієнт А при параметричних збудженнях коефіцієнта К і (блок 1, фіг 1) в рівнянні (20) Результати розрахунків приведені в таблиці 2 і показані на фіг З 2 6 4 10 Кі Аі А2 А 4 8 2 10 6 9 1 10 8 9,6 0,4 10 зв'язку, який включає підсилювач 13, мікропривід 14 і редуктор 15, а кутова швидкість зовнішньої рамки гіроскопа Q 2 2-го каналу формується як алгебраїчна сума вимірювальної кутової швидкості основи 1 Q і доповненої кутової швидкості, пропорційної сигналу U-i, ВІДПОВІДНО рівнянню Q 2 = Q + U1P1 де Pi = К 6 К 7 К 8 Аналогічно вище викладеному статичні рівняння для даної системи мають вигляд (1 + K 1 K 2 PiP 2 )U 1 = К!(1 + K 2 p 2 )Q (24) (1 + K 1 K 2 PiP 2 )U 2 = К 2 (1 + KiPOQ (25) де К і - коефіцієнт перетворення ЧЕ 2 1-го канала, К 2 - коефіцієнт перетворення ЧЕ 9 2-го канала При виконанні умови КіРі =1 (26) тОд| Таблиця 2 ' >/\ і | 14 16 18 І 10 с ; и с т © м $ 5 в и мрк ня Kvfobipei. IB \f\к с Ш Л/ -0,666 -0,8 OnpaL ює+&§8^пн л VI Ч iQ©ivi 'я ви м№ соб що кр= К: = 10,1ft = 0 1 2, С ю : 10 = 5 Вигляд цих залежностей свідчить, що в заявленому способі сумарний коефіцієнт А перетворення системи є інваріантним відносно параметричних збуджень коефіцієнта Кі перетворювача 1 -го канапа Це, в свою чергу, визначає, що лінійна зміна К і приводить до нелінійної зміни Аі і рефлексивну (дзеркальну, відбиткову) зміну А 2 Ця властивість визначається тим, що частинна похідна коефіцієнта А по К і дорівнює нулю ^ дК =0 (21) В якості приклада здійснювання заявленого способу на фіг 4 приведена 2-х канальна система вимірювання кутової швидкості літального апарата (ЛА) [3] Система складається з основи 1, яка закріплена на корпусі ЛА, вертикальна вісь якого збігається з загальною віссю системи вимірювання чутливого елемента 2 (ЧЕ) 1-го канала, в якості якого використовується 2-х ступеневий гіроскоп, перетворювача 3 кутового переміщення внутрішньої рамки в електричний сигнал, пружини 4, демпфера 5, підсилювача 6, мікропривода 7, редуктора, ЧЕ 9 2-го канала, перетворювача 10, пружини 1 1 , демпфера 12, підсилювача 13, мікропривода 14, редуктора 16 Виходи перетворювачів З і 10 підключені до входів мікроконтролера 16 Підсилювач 6, мікропривод 7 і редуктор 8 утворюють рефлексивний зв'язок з 1-го каналу вимірювання на 2-й, а підсилювач 13, мікропривод 14 та редуктор 15 утворюють рефлексивний зв'язок з 2-го канала на 1-й Це приводить до того, що кутова швидкість зовнішньої рамки гіроскопа Qi 1 -го канала формується як алгебраїчна сума вимірювальної кутової швидкості основи 1 Q і доповненої кутової швидкості, пропорційної сигналу U 2 , ВІДПОВІДНО рівнянню Qi = Q + и 2 р 2 (22) де р 2 = К13К14К15 - коефіцієнт рефлексивного При виникненні кутової швидкості основи 1 починається прецесія ЧЕ 2 і 9, що призводить до повертання внутрішніх рамок гіроскопів 1-го та 2-го каналів і виникненню сигналів Ui і U2 перетворювачів 2 і 10 При цьому сигнал Ui за допомогою рефлексивного зв'язку рі = КєКуКв перетворюється в кутову швидкість, яка прикладається до зовнішньої рамки гіроскопа 2-го каналу і протилежно направлена кутовій швидкості Q, і ВІДПОВІДНО умові (26) компенсує и Таким чином Ui = 1 0 - 5 = 5 0 , U 2 = 0 Сигнал Ui поступає в мікроконтролер 16, де виконується дія Q = 5010 = 5 Розглянемо вимірювання кутової швидкості при параметричних збудженнях ЧЕ 1-го та 2-го каналів Приклад 1 К і =8, К 2 = 10 Внаслідок порушення вимоги (26) заявляється сигнал U 2 , який за допомогою рефлексивного зв'язку р 2 = К13К14К15 перетворюється в кутову швидкість, яка прикладається до зовнішньої рамки гіроскопа 1-го канала Тоді маємо Т7 ^ 8 ( 1 + 10-2)5 1 + 80-0.2 ^ 10(1-8-0.1)5 1 + 80-0.2 •5 = 49.411 :0.П8-5 = 0.590 49.411+0.59 10 Приклад 2 К і = 5, К 2 = 10 47143 ті 12(1 + 12-2)5 —f) ! 1 + 144-0.2 П -10.067-5=50,335 12(1-12-0.1)5 ^ 1 2 0 ^ = 0 . 4 5 4 - 5 = 2.273 11 29.8 UU ' 3 — —U. .O 50.335-0.4 -4.993 10 Відносна помилка вимірювання дорівнює ДО = 0,14% Приклад 6 К і к2 = 8, 10(1 + 8-2)5 с 47.727+2 273 _ 10 Таким чином приведена 2-х канальна система вимірювання кутової швидкості ЛА є інваріантною відносно параметричних збуджень ЧЕ 1-го каналу Приклад 3 Кі = 8, К2 = 8 1 ц ^8(1 + 8-2)5 = 9 8 5 5 . 5 ^ 4 9 . 2 7 5 1 + 64-0.2 2 О щ 1-1-8- 2 0/1 І ґ\ = 10, =10 50 -о.гU о\ і. — 1 \J -ш Л 8(1-8-0.1)5 13-8 4985 10 відносна дорівнює помилка вимірювання при цьому Приклад 4 К і = 8, К2 = 12 8(1 + 12-2)5 1 + 96-0.2 ^9.9-5 = 49.5 20 2 49.5 + 0.59 = 5.009 10 Відносна помилка вимірювання дорівнює 5-5.009| L 100% = 0.18% Приклад 5 К і = 12, К2 = 12 Таким чином, заявлений спосіб порівняно з способом-прототипом має більш високу точність тому що сумарна передаточна функція є інваріантною відносно параметричних збуджень 1го або 2-го каналів Заявлений спосіб має практичну інваріантність тому що відносна помилка при одночасному параметричному збудженні всіх каналів складає меншу помилку (менше 1%), що задовольняє вимогам по точності вимірювання в багатьох технічних приладах Заявлений спосіб має більшу швидкодію, тому що в процесах вимірювання беруть участь всі канали і при цьому стале значення суми сигналів на виходах вимірювальних каналів знаходиться на заданому рівні Література 1 Полищук ЕС Измерительные преобразователи К , Вища школа, 1981, — С 27 2 Золотова Т М, Кербников Ф И , Розенблат МА Резервирование аналоговых устройств автоматики М , Энергоатомиздат, 1986, — с 24 25 3 Павлов В А Гироскопический эффект и его использование Л-д, судостроение, 1985, — с 90 47143 ФІГ. 1 О.І о.2 яз ff.-f as as а? оа о.? Фіг. 2 10 11 47143 О 2 і Є Фіг. З Фіг. 4 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна (044) 456 - 20 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71 12
ДивитисяДодаткова інформація
Автори англійськоюBalabanov Ihor Valeriiovych, Zbrutskyi Oleksandr Vasyliovych
Автори російськоюБалабанов Игорь Валериевич, Збруцкий Александр Васильевич
МПК / Мітки
МПК: G01D 9/00
Мітки: вимірювання, фізичних, величин, спосіб
Код посилання
<a href="https://ua.patents.su/6-47143-sposib-vimiryuvannya-fizichnikh-velichin.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання фізичних величин</a>
Спосіб вимірювання фізичних величин
Номер патенту: 38414
Опубліковано: 15.05.2001
Автори: Репа Федір Михайлович, Водотовка Володимир Ілліч
МПК: G01R 19/00
Мітки: фізичних, вимірювання, величин, спосіб
Формула / Реферат:
Спосіб вимірювання фізичних величин, що включає перше вимірювання обернено перетвореної фізичної величини (ФВ) х, друге вимірювання при зміні в q<1 разів чутливості оберненого перетворення ФВ, який відрізняється тим, що виконують додатково третє і четверте вимірювання, причому перед третім вимірюванням до вимірюваної ФВ додають сигнал еталонної ФВ х0, перед четвертим вимірюванням встановлюють чутливість...
Спосіб вимірювання фізичних величин
Номер патенту: 42472
Опубліковано: 15.10.2001
Автори: Водотовка Володимир Ілліч, Репа Федір Михайлович
МПК: G01R 19/00
Мітки: фізичних, спосіб, вимірювання, величин
Формула / Реферат:
Спосіб вимірювання фізичних величин (ФВ), що включає знаходження залежності між результатами проміжних вимірів ФВ x і зразковою мірою x0 при масштабуванні останньої, вимірювання масштабно перетвореної міри та визначення значення ФВ за отриманою залежністю, який відрізняється тим, що по черзі при одному і тому ж масштабі вимірюють значення ФВ та зразкової міри, змінюють масштаб при вибраній границі вимірювання ФВ, повторно вимірюють значення...
Пристрій для вимірювання фізичних властивостей рідкокристалічних матеріалів
Номер патенту: 32177
Опубліковано: 15.12.2000
Автори: Стаднік Петро Омел'янович, Маліков Віталій Якович, Лисецький Лонгин Миколайович, Галунов Микола Захарович
МПК: G01N 27/14
Мітки: вимірювання, властивостей, пристрій, матеріалів, рідкокристалічних, фізичних
Текст:
...речовини, що досліджується. Уведення в пристрій тепловідводу дозволяє відводити тепло від стороні кремнієвого напівпровідника, що нагрівається, при пропусканні через ньог електричного струму. Уведення в пристрій кремнієвого напівпровідника дозволяє зменшити температуру на на боці напівпровідника, що охолоджується, при пропусканні через нього електричного струму. Установлення кремнієвого напівпровідника між нижньою поверхнею поржнистого...
Прилад-каліпер для вимірювання фізичних розмірів частин тіла
Номер патенту: 37691
Опубліковано: 15.05.2001
Автори: Розорінов Георгій Миколайович, Петрушевський Іван Іванович
МПК: A61B 5/107
Мітки: розмірів, вимірювання, прилад-каліпер, фізичних, тіла, частин
Формула / Реферат:
Прилад-каліпер для вимірювання фізичних розмірів частин тіла, що містить дугоподібні вимірювальні ніжки з рукоятками, підпружинені одна до одної і споруджені кінцевими фіксаторами, шарнірно зв'язані між собою і кінематично з'єднані із засобом вимірювання, який відрізняється тим, що дугоподібні вимірювальні ніжки накладені одна на одну і на шарнірних кінцях своїх мають упори, зв'язані між собою розпірною спіральною пружиною, яка розміщена в...
Пристрій для вимірювання фізичних властивостей матеріалів
Номер патенту: 4041
Опубліковано: 27.12.1994
Автори: Стадник Петро Ємельянович, Тіман Беніамін Липович, Маліков Віталій Якович
МПК: G01N 29/00
Мітки: вимірювання, пристрій, властивостей, фізичних, матеріалів
Формула / Реферат:
Устройство для измерения физических свойств материалов, содержащее преобразователь звука, акустически связанные с ним между собой мембрану и предназначенный для закрепления контролируемого объекта шток, усилитель, выход которого соединен с преобразователем звука, катушку индуктивности, индуктивно связанную со штоком и подключенную ко входу усилителя. стакан, установленный в емкости с жидким азотом, в котором расположен шток в парах азота, и...
Попередній патент: Склад для виготовлення будівельної кераміки
Наступний патент: Спосіб модифікування ливарних алюмінієвих сплавів підвищеної корозійної стійкості
Випадковий патент: Полегшена тампонажна суміш