Пристрій для випорожнення сміттєвих контейнерів
Формула / Реферат
1. Пристрій для випорожнення сміттєвого контейнера (1), який включає принаймні одну систему (2) випорожнення контейнера, що містить принаймні один маніпулятор-підйомник (3), обладнаний на одному зі своїх країв захоплювачем (4) для можливості після захоплення сміттєвого контейнера (1) його підйому та випорожнення в накопичувальний кузов (5) вантажівки (8), який відрізняється тим, що маніпулятор-підйомник (3) установлено на основі (6) системи (2) випорожнення контейнера, що має на іншому своєму краю - осьове з'єднання (LEV) з маніпулятором-підйомником (3), система (2) випорожнення контейнера також містить пристосування (7) переміщення та напрямні елементи (10) основи (6) вздовж фіксованого напрямного елемента (11) і в заданому напрямку переміщення (TR2), осьове з'єднання (LEV) виконано з можливістю забезпечення руху маніпулятора-підйомника (3) навколо осі, що є перпендикулярною до напрямку переміщення (TR2), при цьому пристосування (7) для переміщення виконано з можливістю переміщення основи (6) між розгорнутою позицією, при якій осьове з'єднання (LEV) маніпулятора-підйомника (3) розміщене поза фіксованим напрямним елементом (11) основи (6), та іншою - згорнутою позицією, при якій осьове з'єднання (LEV) маніпулятора-підйомника (3) розміщене в інтервалі, що визначається краями фіксованого напрямного елемента (11) основи (6).
2. Пристрій за п. 1, який відрізняється тим, що пристосування (7) переміщення та напрямні елементи (10) включають зубчату рейку (13), яку розміщено вздовж напрямку переміщення (TR2) і зубці якої утворюють зубчату передачу з зубцями шестірні (14), виконаної з можливістю обертання двигуном, установленим на основі (6) для забезпечення можливості переміщення основи (6) в тому чи іншому напрямку вздовж фіксованого напрямного елемента (11).
3. Пристрій за п. 1 або п. 2, який відрізняється тим, що основа (6) включає проміжну деталь (16), до якої закріплено на осьовому з'єднанні маніпулятор-підйомник (3) для утворення осьового з'єднання (LEV) системи підйому маніпулятора-підйомника (3), проміжну деталь (16) установлено на станині (12), яка сполучена з пристосуваннями (7) переміщення для забезпечення можливості переміщення основи (6) системи (2) випорожнення контейнера, при цьому проміжну деталь (16) встановлено за допомогою осьового з'єднання навколо перпендикулярної осі (PIVB) до напрямку переміщення (TR2) основи (6) та перпендикулярної осі по відношенню до осі осьового з'єднання (LEV) системи підйому маніпулятора-підйомника (3).
4. Пристрій за будь-яким з пп. 1-3, який відрізняється тим, що маніпулятор-підйомник (3) обладнано основною (17), подовжувальною (18) секціями та крайньою секцією (19) із захоплювачем (4), яку встановлено на осьовому з'єднанні по відношенню до інших секцій (17, 18) маніпулятора-підйомника (3) вздовж осі (PIV11C), що є паралельною по відношенню до осі осьового з'єднання системи підйому маніпулятора-підйомника (3) для забезпечення можливості направлення захоплювача (4).
5. Пристрій за п. 4, який відрізняється тим, що захоплювач (4) установлено вільно із застосуванням гідроциліндра системи компенсації на осьовому з'єднанні на крайній секції (19), що закріплена на осьовому з'єднанні до маніпулятора-підйомника (3) вздовж осі (PIV12), що є паралельною по відношенню до осі осьового з'єднання (PIV11C) крайньої секції (19) маніпулятора-підйомника (3) із заданим діапазоном кутового повороту.
Текст
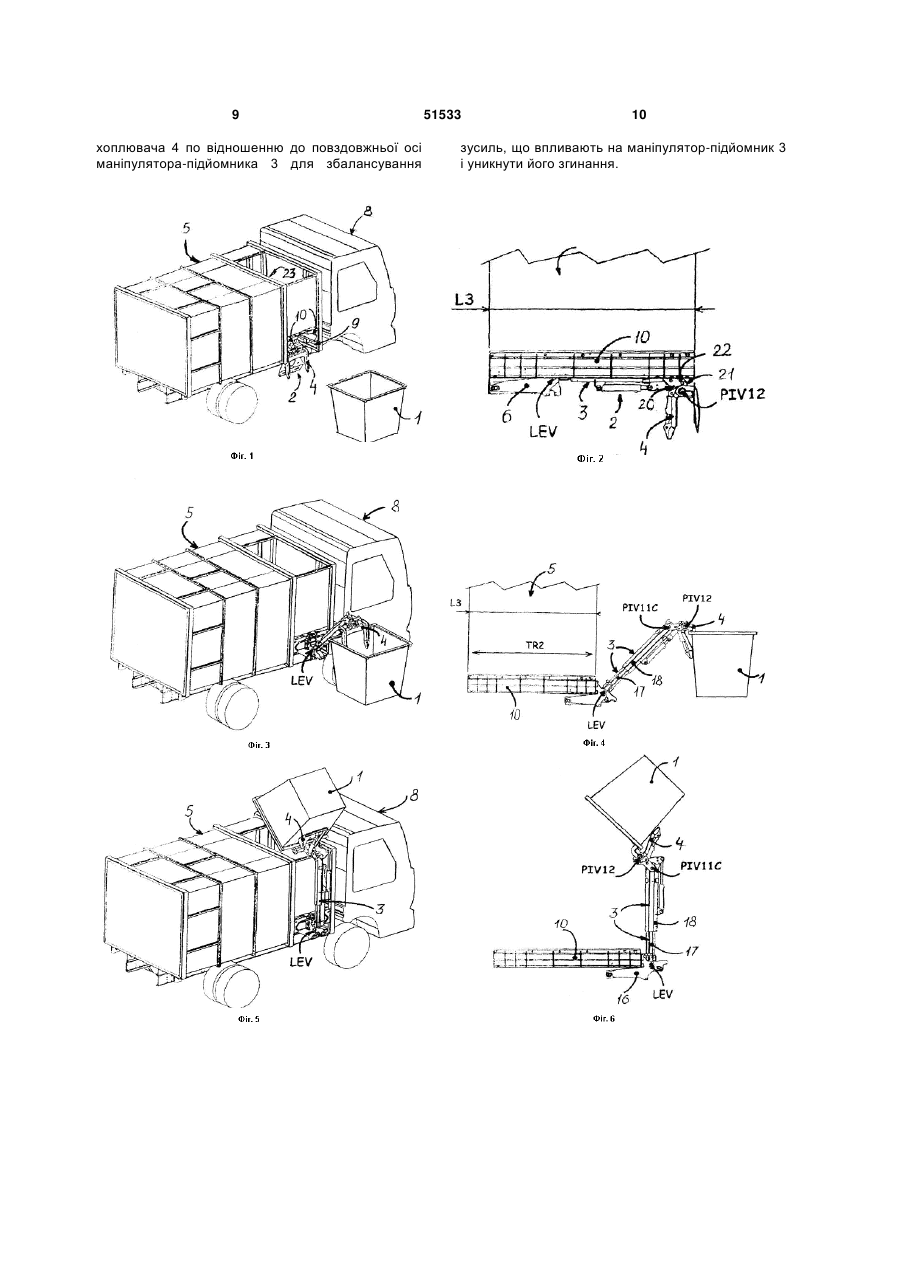
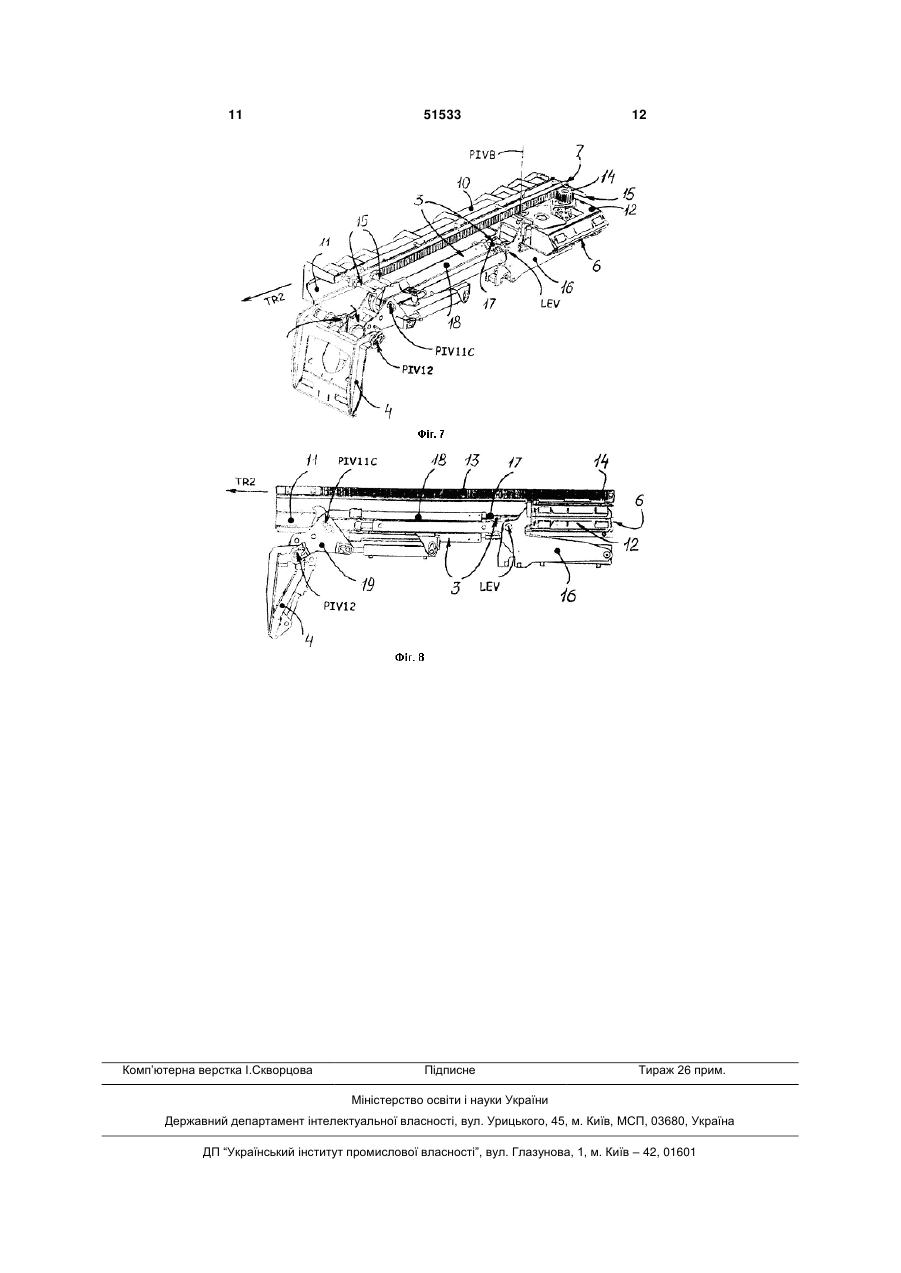
1. Пристрій для випорожнення сміттєвого контейнера (1), який включає принаймні одну систему (2) випорожнення контейнера, що містить принаймні один маніпулятор-підйомник (3), обладнаний на одному зі своїх країв захоплювачем (4) для можливості після захоплення сміттєвого контейнера (1) його підйому та випорожнення в накопичувальний кузов (5) вантажівки (8), який відрізняється тим, що маніпулятор-підйомник (3) установлено на основі (6) системи (2) випорожнення контейнера, що має на іншому своєму краю - осьове з'єднання (LEV) з маніпулятором-підйомником (3), система (2) випорожнення контейнера також містить пристосування (7) переміщення та напрямні елементи (10) основи (6) вздовж фіксованого напрямного елемента (11) і в заданому напрямку переміщення (TR2), осьове з'єднання (LEV) виконано з можливістю забезпечення руху маніпулятора-підйомника (3) навколо осі, що є перпендикулярною до напрямку переміщення (TR2), при цьому пристосування (7) для переміщення виконано з можливістю переміщення основи (6) між розгорнутою позицією, при якій осьове з'єднання (LEV) маніпуляторапідйомника (3) розміщене поза фіксованим напрямним елементом (11) основи (6), та іншою - згорнутою позицією, при якій осьове з'єднання (LEV) маніпулятора-підйомника (3) розміщене в інтервалі, що визначається краями фіксованого напрямного елемента (11) основи (6). 2. Пристрій за п. 1, який відрізняється тим, що пристосування (7) переміщення та напрямні елементи (10) включають зубчату рейку (13), яку розміщено вздовж напрямку переміщення (TR2) і зубці якої утворюють зубчату передачу з зубцями шестірні (14), виконаної з можливістю обертання U 2 (19) 1 3 Відомо пристрій для випорожнення сміттєвих контейнерів у накопичувальний контейнер з підйомним пристроєм і з ходовими полозками, який містить щонайменше один поворотний пристрій з поворотний кронштейном, розміщений на підйомному пристрою. На поворотному кронштейні розміщено шарнірну чотириланцюгову напрямну з верхнім приводним важелем і нижнім приводним важелем, на якій установлено підйомну раму з прийомним пристроєм для захоплення сміттєвого контейнера. Верхній приводний важіль подовжено за його точку зчленування до накопичувального контейнеру та утворює керуючий важіль, між вільним кінцем якого та ходовими полозками установлено на шарнірі циліндричний поршневий пристрій, при приведенні в дію якого його точка зчленування на шарнірній четириланцюговій напрямні переміщується по дузі кола між обома точками зчленування шарнірної четириланцюгової напрямної на поворотному кронштейні [RU № 2197419, B65F 3/04, 1998]. Найближчим до корисної моделі, що заявляється, є пристрій для випорожнення сміттєвих контейнерів, що входить до складу сміттєвоза з бічним завантаженням КО-413 на шасі ГАЗ. Пристрій включає маніпулятор-підйомник із захоплювачем і пульт керування робочими органами, що розміщені з правого боку машини. Маніпуляторомпідйомником здійснюють захоплення, підйом, перекидання, струшування та установку контейнера на місце. [ЗАО Дормаш, м. Орел, Уралмаш, м. Челябінськ, http://www.dormashktd.com.ua/ko413 .html]. Зазначений пристрій, як і попередній аналог, має недостатню надійність та обмежені функціональні можливості. В основу корисної моделі поставлено задачу підвищення надійності та розширення функціональних можливостей пристрою для випорожнення сміттєвого контейнера. Поставлену задачу вирішують тим, що у пристрою для випорожнення сміттєвих контейнерів, який включає принаймні одну систему випорожнення контейнера, що містить принаймні один маніпулятор-підйомник, обладнаний на одному зі своїх країв захоплювачем для можливості після захоплення контейнера його підйому та випорожнення в накопичувальний кузов вантажівки, згідно з корисною моделлю, маніпулятор-підйомник установлено на основі системи випорожнення контейнера, що має на іншому своєму краю - осьове з'єднання з маніпулятором-підйомником, система випорожнення контейнера також містить пристосування переміщення та напрямні елементи основи вздовж фіксованого напрямного елемента і в заданому напрямку переміщення, осьове з'єднання виконано з можливістю забезпечення руху маніпулятора-підйомника навколо осі, що є перпендикулярною до напрямку переміщення, при цьому пристосування для переміщення виконано з можливістю переміщення основи між розгорнутою позицією, при якій осьове з'єднання маніпуляторапідйомника розміщене поза фіксованим напрямним елементом основи та іншою - згорнутою позицією, при якій осьове з'єднання маніпулятора 51533 4 підйомника розміщене в інтервалі, що визначається краями фіксованого напрямного елемента основи. Пристосування переміщення та напрямні елементи включають зубчату рейку, яку розміщену вздовж напрямку переміщення і зубці якої утворюють зубчату передачу з зубцями шестерні, виконаної з можливістю обертання двигуном, установленим на основі для забезпечення можливості переміщення основи в тому чи іншому напрямку вздовж фіксованого напрямного елементу. Основа включає проміжну деталь, до якої закріплено на осьовому з'єднанні маніпуляторпідйомник для утворення осьового з'єднання системи підйому маніпулятора-підйомника, проміжну деталь установлено на станині, яка сполучена з пристосуваннями переміщення для забезпечення можливості переміщення основи системи випорожнення контейнера, при цьому проміжну деталь встановлено за допомогою осьового з'єднання навколо перпендикулярної осі до напрямку переміщення основи та перпендикулярної осі по відношенню до осі осьового з'єднання системи підйому маніпулятора-підйомника. Маніпулятор-підйомник обладнано основною, подовжувальною секціями та крайньою секцією із захоплювачем, яку встановлено на осьовому з'єднанні по відношенню до інших секцій маніпулятора-підйомника вздовж осі, що є паралельною по відношенню до осі осьового з'єднання системи підйому маніпулятора-підйомника для забезпечення можливості направлення захоплювача. Захоплювач установлено вільно із застосуванням гідроциліндра системи компенсації на осьовому з'єднанні на крайній секції, що закріплена на осьовому з'єднанні до маніпуляторапідйомника вздовж осі, що є паралельною по відношенню до осі осьового з'єднання крайньої секції маніпулятора-підйомника із заданим діапазоном кутового повороту. Пристрій, що заявляється, для випорожнення контейнера має ширші функціональні можливості та надійніший в експлуатації у порівнянні з прототипом. Пристосування переміщення сконфігуровані таким чином, щоб забезпечити можливість переміщення основи і, як наслідок, системи випорожнення контейнера повністю між розгорнутим положенням, при якому осьове з'єднання підйому маніпулятора-підйомника розміщується поза межами інтервалу, що визначається шириною накопичувального кузова вантажівки та згорнутим положенням, при якому осьове з'єднання підйому маніпулятора-підйомника розміщується в межах інтервалу, що визначається шириною накопичувального кузова. Корисна модель пояснюється рисунками. На Фіг.1 зображено загальний вигляд вантажівки, що обладнана пристроєм випорожнення сміттєвого контейнера, при згорнутому положенні маніпулятора-підйомника; на Фіг.2 - вигляд збоку системи випорожнення та сміттєвого контейнера Фіг.1; 5 на Фіг.3 – загальний вигляд вантажівки при розгорнутому положенні маніпулятора-підйомника та в процесі підйому сміттєвого контейнера; на Фіг.4 - вигляд збоку системи випорожнення контейнера Фіг.З; на Фіг.5 - загальний вигляд вантажівки при розгорнутому положенні маніпулятора-підйомника та в піднятому стані вздовж відповідної бічної сторони накопичувального кузова сміттєвоза для випорожнення сміттєвого контейнера в накопичувальний кузов; на Фіг.6 - вигляд збоку системи випорожнення та сміттєвого контейнера Фіг.5; на Фіг.7 - фрагмент загального вигляду верхньої частини системи випорожнення в згорнутому положенні маніпулятора-підйомника, при цьому напрямні елементи представлені лише з одного боку маніпулятора-підйомника; на Фіг.8 - вигляд збоку системи випорожнення Фіг.7. Пристрій для випорожнення сміттєвого контейнера 1 складається принаймні з системи 2 випорожнення контейнера, яка включає принаймні один маніпулятор-підйомник 3, що обладнано на одному зі своїх країв захоплювачем 4 та має з іншого свого краю осьове кріплення підйому LEV, навколо осі, що є, в тій чи іншій мірі, паралельною повздовжній осі накопичувального кузова 5, з основою 6 системи 2 випорожнення контейнера, на якій встановлено маніпулятор-підйомник 3. Пристрій випорожнення сміттєвого контейнера також включає пристосування 7 переміщення основи 6 системи 2 випорожнення в заданому напрямку переміщення TR2 (Фіг.7 та Фіг.8). Пристосування 7 переміщення сконфігуровані таким чином, щоб забезпечити можливість переміщення основи 6 і, як наслідок, системи 2 випорожнення контейнера повністю між розгорнутим положенням, при якому осьове з'єднання LEV підйому маніпулятора-підйомника 3 розміщується поза межами інтервалу, що визначається шириною накопичувального кузова 5 (Фіг.3 та Фіг.3) та згорнутим положенням, при якому осьове з'єднання LEV підйому маніпулятора-підйомника 3 розміщується в межах інтервалу, що визначається шириною L3 накопичувального кузова 5 (Фіг.1 та Фіг.2), тобто проекція розташування осьового з'єднання LEV в напрямку ширини накопичувального кузова 5, що називається поперечним напрямком, розміщується на зазначеному проміжку ширини. Поперечний напрямок відповідає при встановленій системі вивантаження та накопичення на вантажівці 8 в горизонтальному напрямку, перпендикулярному повздовжньому напрямку вантажівки 8. Система 2 випорожнення розташована в накопичувальному кузові 5, для чого виконано отвір 9, крізь який виходить маніпулятор-підйомник 3 підйому системи 2 випорожнення. Пристосування 7 переміщення сполучені з напрямними елементами 10 основи 6 системи 2 випорожнення вздовж фіксованого напрямного елемента 11 та відповідно до напряму переміщення TR2. Переміщення та направлення основи 6 системи 2 випорожнення здійснюють шляхом переміщення основи 6. При приєднаному пристрою ви 51533 6 порожнення до накопичувального кузова 5, напрям переміщення TR2 основи 6 системи 2 випорожнення, в тій чи іншій мірі, відповідає поперечному напряму накопичувального кузова 5 (Фіг.4), тобто, в тій чи іншій мірі, горизонтальному напряму та поперечному повздовжньому напряму (чи напряму руху вперед) вантажівки 8. При розгорнутому положенні основи 6 системи 2 випорожнення контейнера осьове з'єднання LEV підйому розміщується у відповідності до напряму переміщення TR.2, поза межами фіксованого напрямного елемента 11 основи 6 системи 2 випорожнення та при згорнутому положенні осьове з'єднання LEV підйому маніпулятора-підйомника 3 розташоване у відповідності до напряму переміщення, в межах інтервалу, що визначається крайніми точками фіксованого напрямного елемента 11 основи 6 системи 2 випорожнення, тобто проекція положення осьового з'єднання LEV на відрізок фіксованого напрямного елемента 11 перебуває в межах між двома крайніми точками фіксованого напрямного елемента 11. Фіксований напрямний елемент 11. в тій чи іншій мірі, відповідає допустимому ходу переміщення системи 2 випорожнення за допомогою пристосування 7 переміщення без врахування станини 12. Осьове з’єднання LEV забезпечує артикуляцію маніпулятора-підйомника З навколо осі, що є, в тій чи іншій мірі, перпендикулярною по відношенню до напрямку переміщення TR2 основи 6 системи 2 випорожнення та паралельно напрямній площині, що формується напрямними елементами 10. Пристосування 7 переміщення включають зубчасту рейку 13, яка проходить вздовж напряму переміщення TR2 і зубці якої утворюють зубчасту передачу з зубцями шестерні 14, що приводиться в обертовий рух двигуном (не показано), який встановлений на основі 6 системи 2 вивантаження для забезпечення переміщення основи 6 в одному чи іншому напрямку вздовж фіксованого напрямного елемента 11. Двигун може обертатися в напрямку, що дозволяє зубцям шестерні 14 утворити зубчасту передачу з зубцями зубчастої рейки 13 та переміщати систему 2 випорожнення для забезпечення розташування осьового з'єднання підйому LEV та маніпулятора-підйомника 3, який обладнано захоплювачем 4, поза межами фіксованого напрямного елемента 11 основи 6 системи 2 випорожнення. З іншого боку, двигун має змогу обертатися в зворотному напрямі, що дозволяє зубцям шестерні 14 утворити зубчасту передачу з зубцями зубчастої рейки 13 в іншому напрямі з метою забезпечення згортання осьового з'єднання LEV та принаймні частини маніпуляторапідйомника 3, бажано маніпулятора підйомника 3 повністю, в межі інтервалу з довжиною, що визначається фіксованим напрямним елементом 11. Фіксовані напрямні елементи 11 основи 6 розгортаються вздовж напряму переміщення TR2 основи 6. Зокрема, напрямні елементи 10 формуються двома сторонами, що розміщені з обох боків основи 6 системи 2 випорожнення. Кожна сторона має вигин, що формує полоз та утворює фіксований напрямний елемент 11. В основному, вигин, 7 що формує полози з кожного боку, є V-подібним профілем, оберненим в напрямку до іншої сторони, на якому розміщується частина основи 6, що заповнює V-подібний вигин, здатна ковзати вздовж полозу. Сторони фіксованого напрямного елемента 11 обладнані засобами регулювання відстані між ними. Таким чином, кожна сторона сполучена з іншою стороною за допомогою стрижнів 15 з різьбою, що дозволяють за допомогою гайок регулювати відстань між сторонами для регулювання свободи ковзання основи 6 системи 2 випорожнення вздовж сторін фіксованого напрямного елемента 11. Крізь зубчасту рейку 13 поблизу кожного з її країв проходять стрижні 15 з різьбою і таким чином слугують засобами фіксації зубчастої рейки 14. Відтань між зубчастою рейкою 13 та сторонами напрямних елементів 10 також регулюється за допомогою гайок, що розміщені з обох боків зубчастої рейки 13 на стрижнях 15 з різьбою, що утримують зазначену зубчасту рейку 13. В боковому напрямі довжина напрямних елементів 10, в тій чи іншій мірі, дорівнює ширині навантажувального кузова 5. У відповідності до Фіг.7 та Фіг.8 основа 6 системи 2 вивантаження містить проміжну деталь 16, на яку змонтовано на осьовому з'єднанні LEV маніпулятор-підйомник 3 і формує згадане осьове з'єднання LEV підйому контейнера 1 маніпулятора-підйомника 3. Проміжна деталь 16 установлена на станіну 12, яка сполучена з пристосуванням 7 переміщення для забезпечення переміщення основи 6 системи 2 випорожнення. Зокрема, на станіні 12 встановлено шестірню 14, що приводиться в рух для утворення зубчастого з'єднання з зубцями зубчастої рейки 13. Проміжна деталь 16 встановлена на осьовому з'єднанні навколо осі PIVB, вертикальна в робочому положенні, перпендикулярна напряму переміщення TR2 основи 6 та перпендикулярна осі осьового з'єднання LEV підйому. Проміжна деталь 16 здатна рухатися навколо осі в кутовому діапазоні порядку 30° центрованому на напряму переміщення TR2 маніпулятора-підйомника 3 для забезпечення руху маніпулятора-підйомника 3, обладнаного захоплювачем 4 навколо вертикальної осі + 157-15° з одного та іншого боку напряму переміщення системи 2 випорожнення. Маніпулятор-підйомник 3 формується з так званої основної секції 17, що встановлена на осьовому з'єднанні на основі 6, утворюючи осьове з'єднання LEV підйому та подовжувальної секції 18, що встановлена у вигляді телескопічного з'єднання на основну секцію 17. Таким чином, подовжувальна секція 18 може рухатися вздовж основної секції 17, ковзаючи, для адаптації довжини маніпулятора-підйомника З для забезпечення захоплення сміттєвого контейнера на різних дистанціях. Маніпулятор-підйомник 3 має також рухому кінцеву секцію 19, на яку встановлені захоплювач 4, що встановлено вільно на осьовому з'єднанні по відношенню до секцій 17, 18 маніпуляторапідйомника 3, по осі PIV11C, що є паралельною до осі осьового з'єднання LEV підйому маніпулятора 51533 8 підйомника 3, для забезпечення спрямування захоплювача 4. Така рухома кінцева секція 19 маніпуляторапідйомника 3 дозволяє, зокрема, направляти донизу захоплювач 4 для захоплення контейнера 1 за верх шляхом захоплення одного з його боків. Дана рухома кінцева секція 19 дозволяє, зокрема, направляти догори захоплювач 4 у поєднанні з підйомом маніпулятора-підйомника З для доведення сміттєвого контейнера 1 до положення випорожнення над накопичувальним кузовом 5. У згорнутому положенні системи 2 випорожнення, секції 17, 18, що розміщуються між основою 6 та рухомою кінцевою секцією 19 маніпуляторапідйомника 3, може розміщуватися вздовж фіксованого напрямного елемента 11, паралельно напрямку переміщення TR2 та рухомій кінцевої секції 19, розміщуючись в інтервалі довжини, що відповідає фіксованому напрямному елементу 11, може опускатися з метою доведення захоплювача 4 під полози напрямних елементів 11. Осьові та телескопічні з'єднання маніпулятора-підйомника 3 та його секцій, сполучених між собою, приводяться в рух за допомогою гідроциліндрів (не показано), один з яких може також приводити в рух захоплювач 4, тобто забезпечувати замикання та розмикання його губ. Захоплювач 4 установлено вільно на осьовому з'єднанні рухомої кінцевої секції 19 маніпуляторапідйомника 3 вздовж осі PIV12, що є паралельною осі осьового з'єднання PIV11C рухомої кінцевої секції 19 маніпулятора-підйомника 3, із заданим кутовим діапазоном. Кутовий діапазон вільного осьового з'єднання захоплювача 4 визначається двома обмежувачами 20, 21 для обмеження руху по кутовому діапазоні, встановлені на захоплювачу 4, пристосовані для сполучення з блокувальними обмежувачами 22 рухомої кінцевої секції 19 маніпулятора-підйомника 3, на якій встановлено захоплювач 4. Вільний діапазон руху захоплювача 4 між обмежувачами 20 та 21 розрахований таким чином, щоб забезпечити, при горизонтальному положенні маніпулятора-підйомника 3, вертикального положення захоплювача 4 в нижньому напрямку під дією його власної ваги, що дозволяє легко завести захоплювач 4 під полози напрямних елементів 10. У згорнутому положенні захоплювач 4 може виходити, бажано незначно, вздовж поперечної осі з інтервалу, який визначається фіксованим напрямним елементом 11 та/чи шириною накопичувального кузова 5, при цьому не виходячи за межі максимально дозволених габаритів вантажівки 8 в ширину. З'єднання між маніпулятором-підйомником 3 та захоплювачем 4 є децентрованим для забезпечення позиціювання захоплювача 4 навпроти приймального отвору 23 в піднятому положенні маніпулятора-підйомника 3 в такий спосіб, щоб контейнер 1, який утримується захоплювачем 4, міг бути випорожнений в приймальний отвір 23. Гідроциліндри (не показані), що забезпечують рух осьового з'єднання рухомої кінцевої секції 19 та телескопічного з'єднання секцій 17 та 18 таким чином розміщуються з протилежного боку від за 9 хоплювача 4 по відношенню до повздовжньої осі маніпулятора-підйомника 3 для збалансування 51533 10 зусиль, що впливають на маніпулятор-підйомник 3 і уникнути його згинання. 11 Комп’ютерна верстка І.Скворцова 51533 Підписне 12 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for emptying garbage containers
Автори англійськоюOlivier Billon, Philippe Fichaux
Назва патенту російськоюУстройство для опорожнения мусорных контейнеров
Автори російськоюБийон Оливье, Фишо Филипп
МПК / Мітки
МПК: B65F 3/02
Мітки: контейнерів, пристрій, сміттєвих, випорожнення
Код посилання
<a href="https://ua.patents.su/6-51533-pristrijj-dlya-viporozhnennya-smittehvikh-kontejjneriv.html" target="_blank" rel="follow" title="База патентів України">Пристрій для випорожнення сміттєвих контейнерів</a>
Пристрій для випорожнення сміттєвих контейнерів
Номер патенту: 49092
Опубліковано: 16.09.2002
Автори: Делле Клаус, Шаубрух Манфред
МПК: B65F 3/02
Мітки: сміттєвих, пристрій, контейнерів, випорожнення
Формула / Реферат:
1. Пристрій для випорожнювання сміттєвих контейнерів в нагромаджувальний контейнер з розташованим на нагромаджувальному контейнері підйомним пристроєм з ходовими полозками і щонайменше одним розташованим на підйомному пристрої поворотним пристроєм з поворотною лапою, на якій розміщена підйомна рама з приймальним пристроєм для захоплювання сміттєвого контейнера, який відрізняється тим, що на поворотному кронштейні розташована шарнірна...
Піднімально-перекидний або перекидний пристрій для випорожнення сміттєвих баків
Номер патенту: 27955
Опубліковано: 16.10.2000
Автор: Нааб Якоб
МПК: B65F 3/02
Мітки: баків, перекидний, піднімально-перекидний, пристрій, випорожнення, сміттєвих
Текст:
...захвата служит поэтом у предпочтительным образом дополнительно для фиксации подлежащего опорожнению мусорного бака, благодаря чему можно отказаться от обычно имеющегося нижнего опорного приспособления, к которому, опираясь, прилегает своей передней стенкой подлежащий опорожнению бак. Необходимые работы по переоборудованию ограничи ваются то лько лишь поворотом захватывающей планки, что можно произвести в течение короткого времени при...
Пристрій для відкривання та випорожнення пляшок “водограй”

Номер патенту: 48036
Опубліковано: 10.03.2010
Автор: Мосьпан Микола Іванович
Мітки: пристрій, відкривання, випорожнення, водограй, пляшок
Формула / Реферат:
1. Пристрій для відкривання та випорожнення пляшок, який характеризується тим, що містить опорну гайку з різзю та розміщеним в ній з можливістю обертання порожнистий корпус, оснащеним з одного боку опорної гайки порожнистою рукояткою, а з протилежного, відносно опорної гайки, боку - змінною ріжучо-продавлюючою насадкою, при цьому опорна гайка забезпечена по меншій мірі одною, шарнірно закріпленою на ній захватною лапкою, а порожниста...
Пристрій для перекидання контейнерів з опорними стояками

Номер патенту: 47564
Опубліковано: 15.07.2002
Автори: Волчко Анатолій Іванович, Масло Микола Андрійович, Кривопляс Олександр Павлович, Гавва Олександр Миколайович, Захаревич Валерій Болеславович
МПК: B65G 65/23
Мітки: стояками, опорними, пристрій, контейнерів, перекидання
Формула / Реферат:
1. Устройство для опрокидывания контейнеров с опорными стойками, содержащее основание, на котором установлена с возможностью поворота приводом в вертикальной плоскости рама с захватными элементами с горизонтальным участком для установки в зазор между стойками контейнера и с вертикальной стенкой для взаимодействия со стенкой контейнера, отличающееся тем, что, с целью повышения надежности путем обеспечения прижима контейнера к вертикальной...
Пристрій для розвантажування контейнерів в кузов сміттєвоза
Номер патенту: 39285
Опубліковано: 15.06.2001
Автори: Стельмашенко Анатолій Іванович, Подольський Юхим Аврамович, Павлик Михайло Федорович, Петраков Іван Володимирович
МПК: B65F 3/02
Мітки: пристрій, сміттєвоза, розвантажування, контейнерів, кузов
Формула / Реферат:
Пристрій для розвантажування контейнерів в кузов сміттєвоза, який містить в собі маніпулятор у вигляді шарнірно зчленованої з рамою сміттєвоза стріли і шарнірно закріплений на неї з можливістю поворота у вертикальній площині захват для контейнерів, кришку для закривання контейнера, кришку для закривання завантажувального отвору в кузові сміттєвоза, і гідроциліндри для управління відповідно стрілою, захватом і кришкою, який відрізняється тим,...
Попередній патент: Сміттєвоз
Наступний патент: Система вивантаження та накопичення для сміттєвоза
Випадковий патент: Вітровий рушій