Сміттєвоз

Формула / Реферат
1. Сміттєвоз, що включає вантажівку (1), обладнану системою вивантаження та накопичення, що містить з одного боку накопичувальний кузов (2) для накопичення вмісту контейнера (3) та з іншого боку - пристрій випорожнення контейнера (3), який включає принаймні одну систему (9) випорожнення контейнера, що містить принаймні один маніпулятор-підйомник (10), обладнаний на одному зі своїх країв захоплювачем (11) для можливості після захоплення контейнера (3) його підйому та випорожнення в накопичувальний кузов (2) вантажівки (1), який відрізняється тим, що накопичувальний кузов (2) складається в змонтованому на шасі (4) стані з двох бічних сторін (5, 6), що є вертикальними, відділеними одна від одної днищем, паралельні до повздовжньої осі накопичувального кузова (2), що відповідає повздовжній осі вантажівки (1), та виконані на відстані ширини накопичувального кузова (2), маніпулятор-підйомник (10) установлено на основі (25) системи (9) випорожнення контейнера, що має на іншому своєму краю - осьове з'єднання (LEV) з маніпулятором-підйомником (10), система (9) випорожнення контейнера містить також пристосування (13) переміщення та напрямні елементи (17) основи (12) вздовж фіксованого напрямного елемента (18) і в заданому напрямку переміщення (TR2), осьове з'єднання (LEV) виконано з можливістю забезпечення руху маніпулятора-підйомника (10) навколо осі, що є перпендикулярною до напрямку переміщення (TR2), при цьому накопичувальний кузов (2) і пристосування (13) переміщення виконано з можливістю переміщення основи (12) між розгорнутою позицією, при якій осьове з'єднання (LEV) маніпулятора-підйомника (10) розміщене поза фіксованим напрямним елементом (18) основи (12) та іншою -згорнутою позицією, при якій осьове з'єднання (LEV) маніпулятора-підйомника (10) розміщене в інтервалі, що визначається краями фіксованого напрямного елемента (18) основи (12).
2. Сміттєвоз за п. 1, який відрізняється тим, що система (9) випорожнення контейнера (3) розміщена в накопичувальному кузові (2) з відповідним отвором (15), виконаним в бічній стороні (6), крізь який виходить маніпулятор-підйомник (10), причому рамка отвору (15) обладнана вздовж своєї внутрішньої сторони, яка формується стороною, що слугує днищем, вирізом чи заглибиною (16) в боковому та повздовжньому напрямах, достатньою для розміщення захоплювача (11), що спрямовано вертикально в напрямку до низу, із запасом чи врівень по відношенню до відповідної бічної сторони (6) накопичувального кузова (2).
3. Сміттєвоз за п. 1, який відрізняється тим, що система вивантаження та накопичення обладнана внутрішньою плитою компактування, що розміщена в поперечній площині по відношенню до бічних сторін (5, 6) накопичувального кузова (2) та формує перед собою разом зі сторонами накопичувального кузова (2) камеру накопичення, при цьому плита компактування виконана з можливістю переміщення всередині накопичувального кузова (2) у відповідності до напряму, що є паралельним по відношенню повздовжньої осі накопичувального кузова (2), для компактування накопиченого вмісту в камері накопичення, причому пристосування 9 випорожнення розміщено в об'ємі накопичувального кузова (2), який відділено плитою компактування від камери накопичення накопичення без зменшення об'єму накопичення.
4. Сміттєвоз за п.1, який відрізняється тим, що пристосування (13) переміщення та напрямні елементи (17) включають зубчату рейку (21), яку розміщену вздовж напрямку переміщення (TR2), і зубці якої утворюють зубчату передачу з зубцями шестірні (22), виконаної з можливістю обертання двигуном, установленим на основі (12) для забезпечення можливості переміщення основи (12) в тому чи іншому напрямку вздовж фіксованого напрямного елемента (18).
5. Сміттєвоз за п. 1, який відрізняється тим, що основа (12) включає проміжну деталь (24), до якої закріплено на осьовому з'єднанні маніпулятор-підйомник (10) для утворення осьового з'єднання (LEV) системи підйому маніпулятора-підйомника (10), проміжну деталь (24) установлено на станині (19), яка сполучена з пристосуваннями (13) переміщення для забезпечення можливості переміщення основи (12) системи (9) випорожнення контейнера, при цьому проміжну деталь (24) встановлено за допомогою осьового з'єднання навколо перпендикулярної осі (PIVB) до напрямку переміщення (TR2) основи (12) та перпендикулярної осі по відношенню до осі осьового з'єднання (LEV) системи підйому маніпулятора-підйомника (10).
6. Сміттєвоз за п. 1, який відрізняється тим, що маніпулятор-підйомник (10) обладнано основною (25), подовжувальною (26) секціями та крайньою секцією (27) із захоплювачем (11), яку встановлено на осьовому з'єднанні по відношенню до інших секцій (25, 26) маніпулятора-підйомника (10) вздовж осі (PIV11C), що є паралельною по відношенню до осі осьового з'єднання системи підйому маніпулятора-підйомника (10) для забезпечення можливості направлення захоплювача (11).
7. Сміттєвоз за п. 1, який відрізняється тим, що захоплювач (11) установлено вільно із застосуванням гідроциліндра системи компенсації на осьовому з'єднанні на крайній секції (27), що закріплена на осьовому з'єднанні до маніпулятора-підйомника (10) вздовж осі (PIV12), що є паралельною по відношенню до осі осьового з'єднання (PIV11C) крайньої секції (27) маніпулятора-підйомника (10) із заданим діапазоном кутового повороту.
Текст
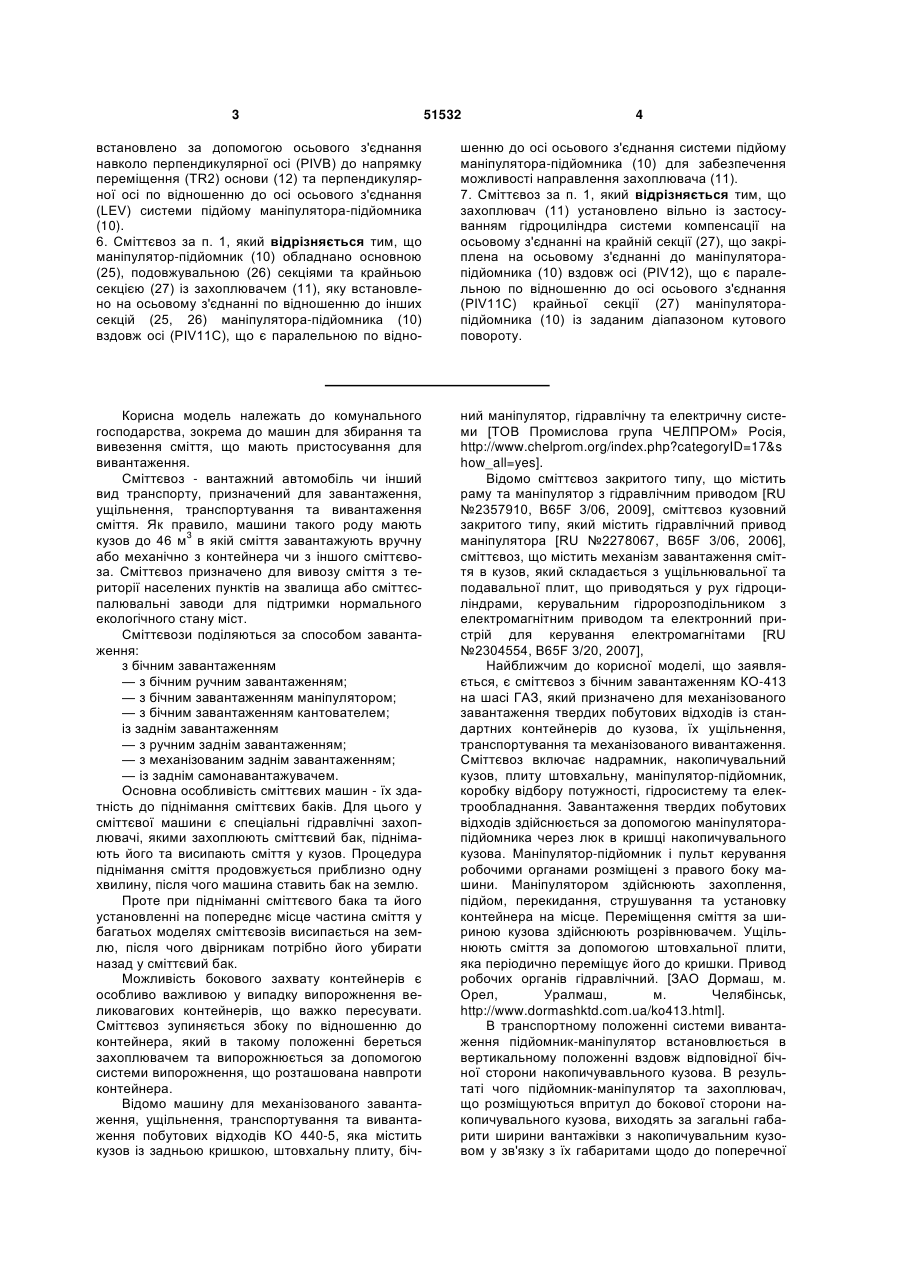
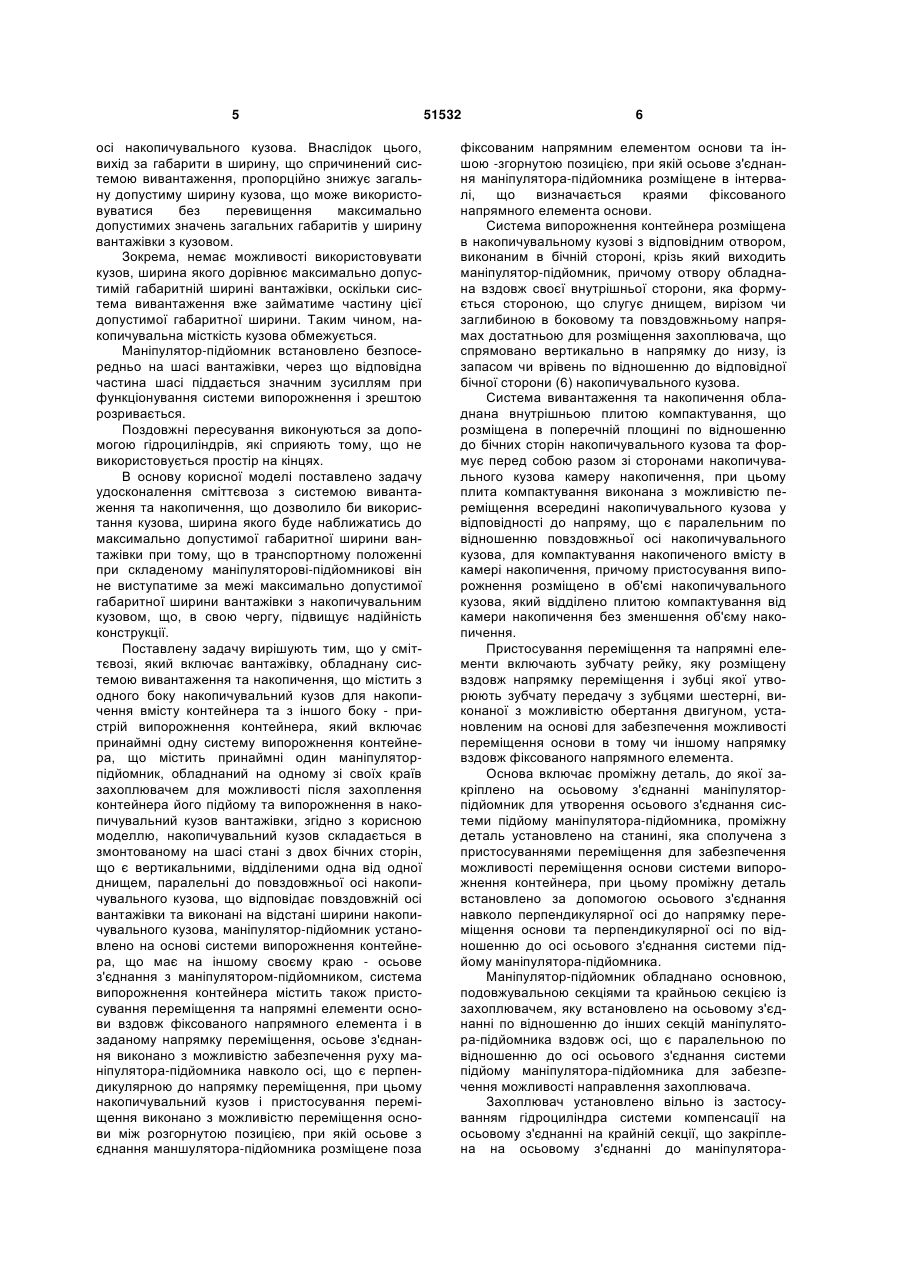
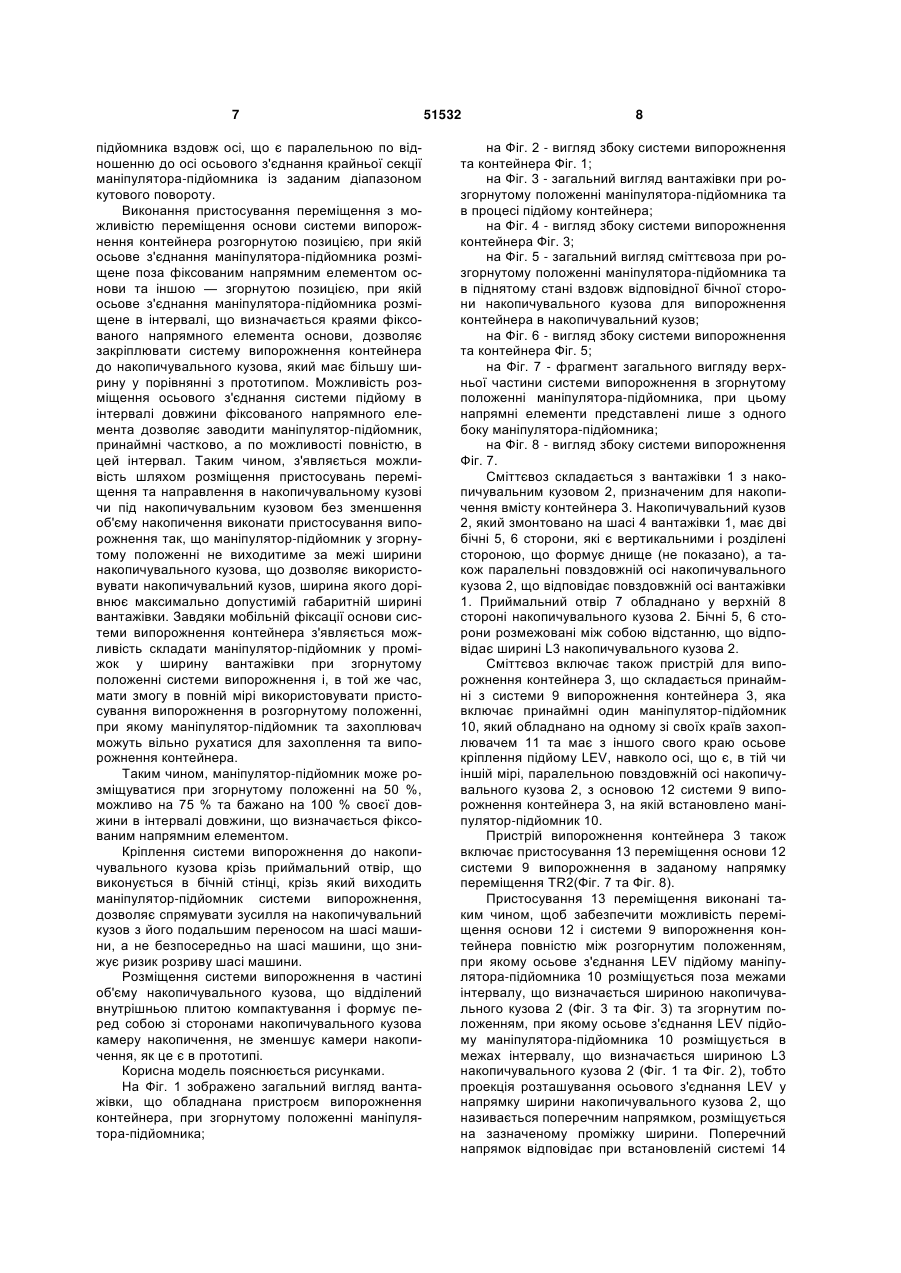
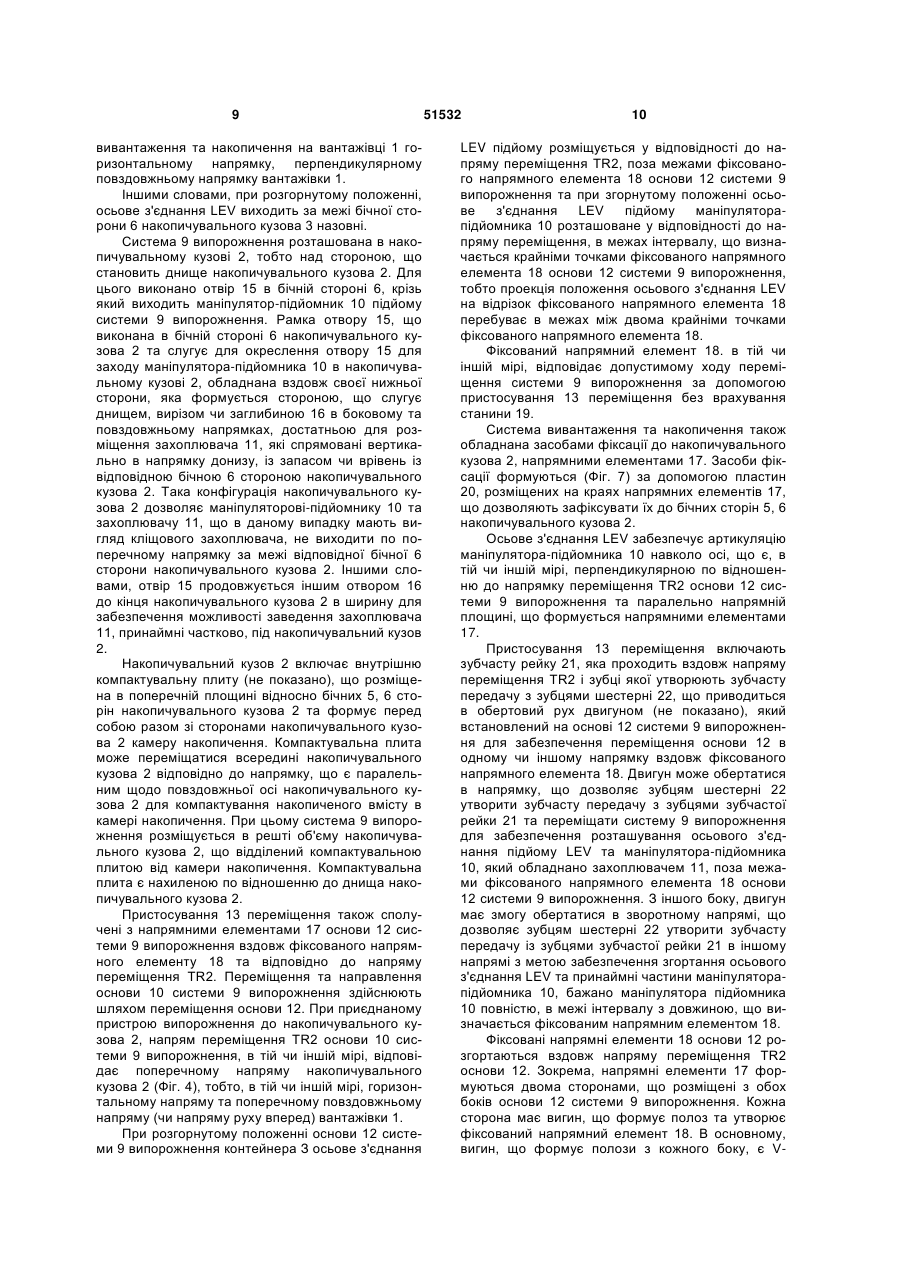
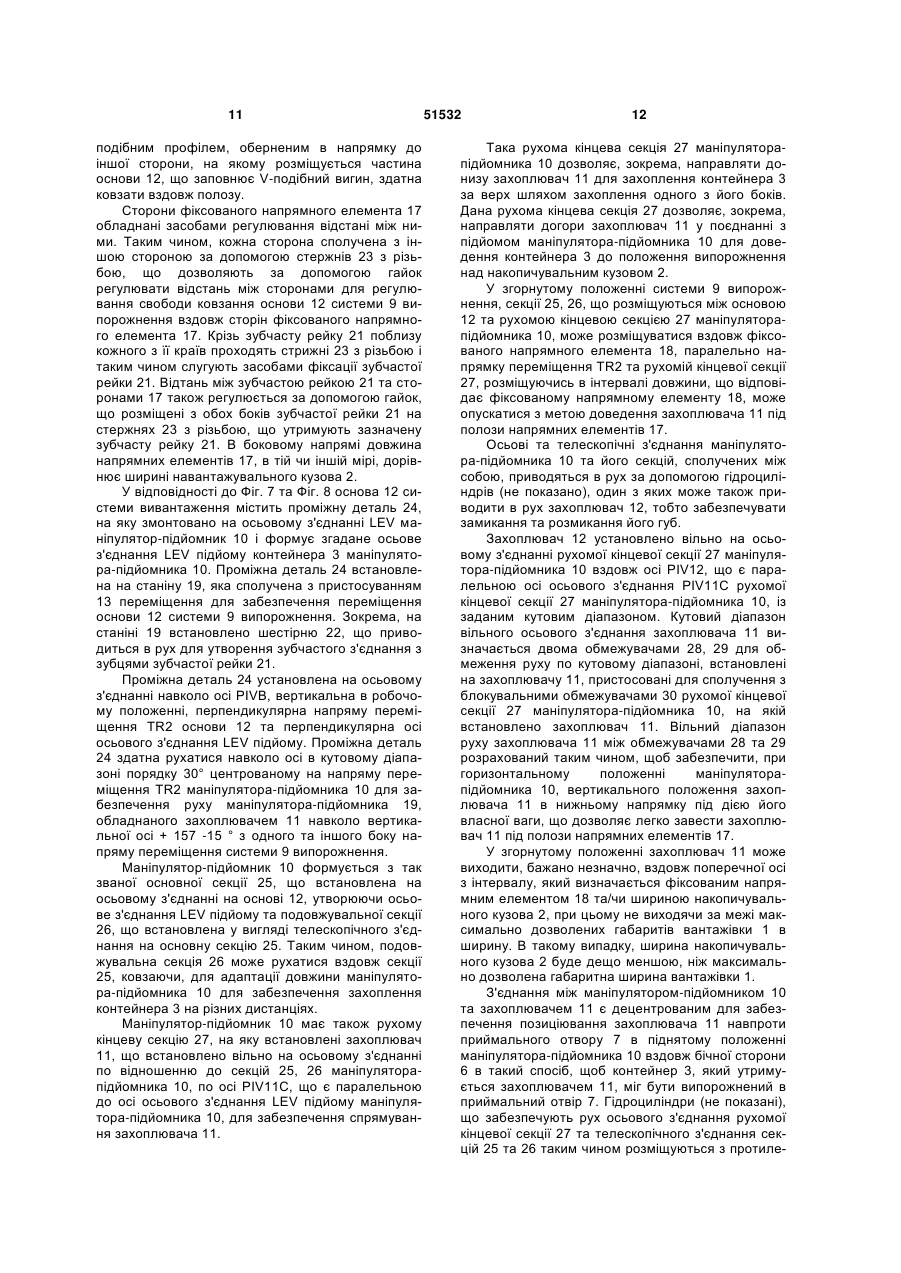
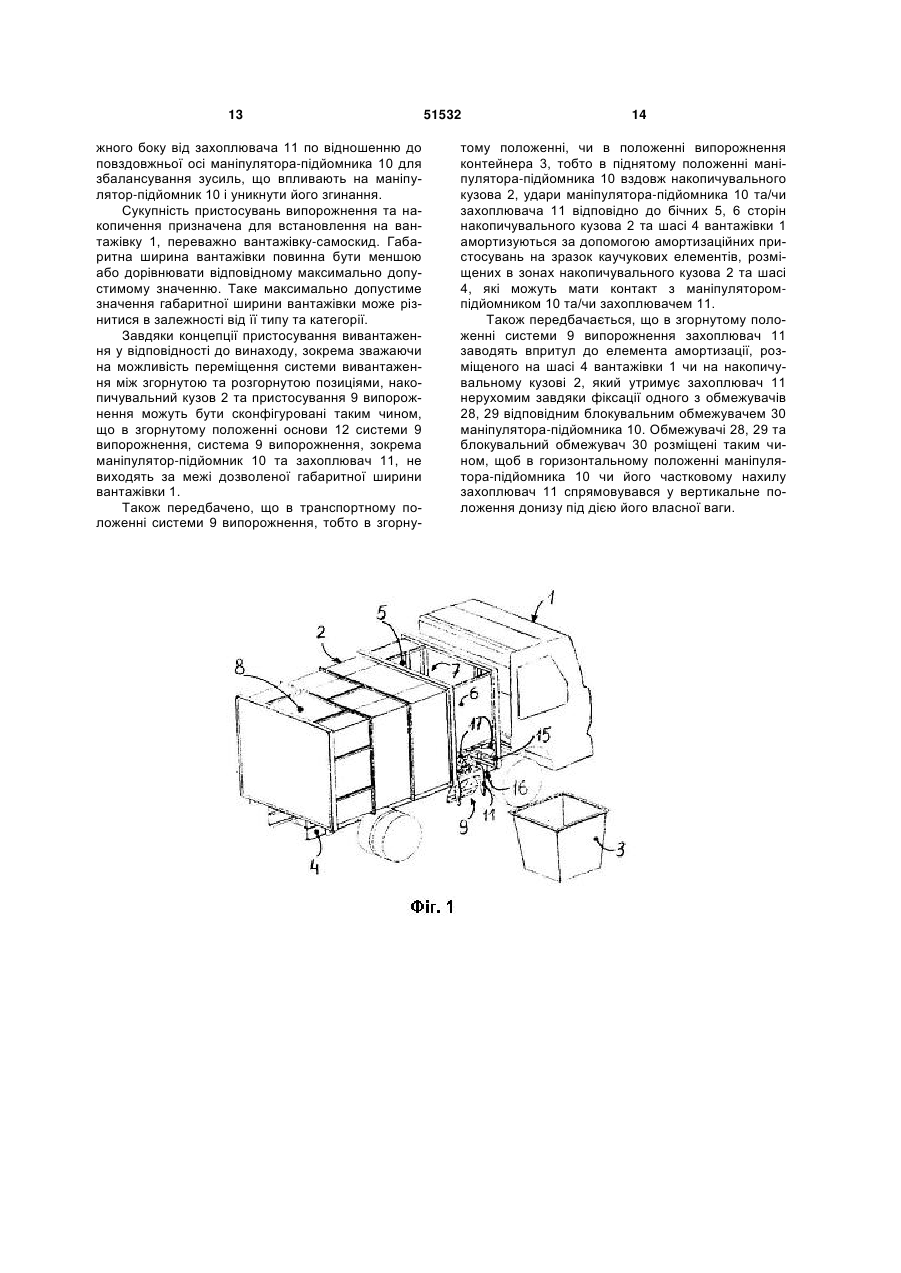
1. Сміттєвоз, що включає вантажівку (1), обладнану системою вивантаження та накопичення, що містить з одного боку накопичувальний кузов (2) для накопичення вмісту контейнера (3) та з іншого боку - пристрій випорожнення контейнера (3), який включає принаймні одну систему (9) випорожнення контейнера, що містить принаймні один маніпулятор-підйомник (10), обладнаний на одному зі своїх країв захоплювачем (11) для можливості після захоплення контейнера (3) його підйому та випорожнення в накопичувальний кузов (2) вантажівки (1), який відрізняється тим, що накопичувальний кузов (2) складається в змонтованому на шасі (4) стані з двох бічних сторін (5, 6), що є вертикальними, відділеними одна від одної днищем, паралельні до повздовжньої осі накопичувального кузова (2), що відповідає повздовжній осі вантажівки (1), та виконані на відстані ширини накопичувального кузова (2), маніпуляторпідйомник (10) установлено на основі (25) системи (9) випорожнення контейнера, що має на іншому своєму краю - осьове з'єднання (LEV) з маніпулятором-підйомником (10), система (9) випорожнення контейнера містить також пристосування (13) переміщення та напрямні елементи (17) основи (12) вздовж фіксованого напрямного елемента (18) і в заданому напрямку переміщення (TR2), осьове з'єднання (LEV) виконано з можливістю забезпечення руху маніпулятора-підйомника (10) навколо осі, що є перпендикулярною до напрямку переміщення (TR2), при цьому накопичувальний кузов (2) і пристосування (13) переміщення виконано з можливістю переміщення основи (12) між розгорнутою позицією, при якій осьове з'єднання (LEV) маніпулятора-підйомника (10) розміщене поза фіксованим напрямним елементом (18) основи (12) та іншою -згорнутою позицією, при якій осьове з'єднання (LEV) маніпулятора-підйомника (10) розміщене в інтервалі, що визначається краями фіксованого напрямного елемента (18) основи (12). 2. Сміттєвоз за п. 1, який відрізняється тим, що система (9) випорожнення контейнера (3) розмі 2 (19) 1 3 51532 4 встановлено за допомогою осьового з'єднання навколо перпендикулярної осі (PIVB) до напрямку переміщення (TR2) основи (12) та перпендикулярної осі по відношенню до осі осьового з'єднання (LEV) системи підйому маніпулятора-підйомника (10). 6. Сміттєвоз за п. 1, який відрізняється тим, що маніпулятор-підйомник (10) обладнано основною (25), подовжувальною (26) секціями та крайньою секцією (27) із захоплювачем (11), яку встановлено на осьовому з'єднанні по відношенню до інших секцій (25, 26) маніпулятора-підйомника (10) вздовж осі (PIV11C), що є паралельною по відно шенню до осі осьового з'єднання системи підйому маніпулятора-підйомника (10) для забезпечення можливості направлення захоплювача (11). 7. Сміттєвоз за п. 1, який відрізняється тим, що захоплювач (11) установлено вільно із застосуванням гідроциліндра системи компенсації на осьовому з'єднанні на крайній секції (27), що закріплена на осьовому з'єднанні до маніпуляторапідйомника (10) вздовж осі (PIV12), що є паралельною по відношенню до осі осьового з'єднання (PIV11C) крайньої секції (27) маніпуляторапідйомника (10) із заданим діапазоном кутового повороту. Корисна модель належать до комунального господарства, зокрема до машин для збирання та вивезення сміття, що мають пристосування для вивантаження. Сміттєвоз - вантажний автомобіль чи інший вид транспорту, призначений для завантаження, ущільнення, транспортування та вивантаження сміття. Як правило, машини такого роду мають кузов до 46 м3 в якій сміття завантажують вручну або механічно з контейнера чи з іншого сміттєвоза. Сміттєвоз призначено для вивозу сміття з території населених пунктів на звалища або сміттєспалювальні заводи для підтримки нормального екологічного стану міст. Сміттєвози поділяються за способом завантаження: з бічним завантаженням — з бічним ручним завантаженням; — з бічним завантаженням маніпулятором; — з бічним завантаженням кантователем; із заднім завантаженням — з ручним заднім завантаженням; — з механізованим заднім завантаженням; — із заднім самонавантажувачем. Основна особливість сміттєвих машин - їх здатність до піднімання сміттєвих баків. Для цього у сміттєвої машини є спеціальні гідравлічні захоплювачі, якими захоплюють сміттєвий бак, піднімають його та висипають сміття у кузов. Процедура піднімання сміття продовжується приблизно одну хвилину, після чого машина ставить бак на землю. Проте при підніманні сміттєвого бака та його установленні на попереднє місце частина сміття у багатьох моделях сміттєвозів висипається на землю, після чого двірникам потрібно його убирати назад у сміттєвий бак. Можливість боковогозахвату контейнерів є особливо важливою у випадку випорожнення великовагових контейнерів, що важко пересувати. Сміттєвоз зупиняється збоку по відношенню до контейнера, який в такому положенні береться захоплювачем та випорожнюється за допомогою системи випорожнення, що розташована навпроти контейнера. Відомо машину для механізованого завантаження, ущільнення, транспортування та вивантаження побутових відходів КО 440-5, яка містить кузов із задньою кришкою, штовхальну плиту, біч ний маніпулятор, гідравлічну та електричну системи [ТОВ Промислова група ЧЕЛПРОМ» Росія, http://www.chelprom.org/index.php?categoryID=17&s how_all=yes]. Відомо сміттєвоз закритого типу, що містить раму та маніпулятор з гідравлічним приводом [RU №2357910, B65F 3/06, 2009], сміттєвоз кузовний закритого типу, який містить гідравлічний привод маніпулятора [RU №2278067, B65F 3/06, 2006], сміттєвоз, що містить механізм завантаження сміття в кузов, який складається з ущільнювальної та подавальної плит, що приводяться у рух гідроциліндрами, керувальним гідророзподільником з електромагнітним приводом та електронний пристрій для керування електромагнітами [RU №2304554, B65F 3/20, 2007], Найближчим до корисної моделі, що заявляється, є сміттєвоз з бічним завантаженням КО-413 на шасі ГАЗ, який призначено для механізованого завантаження твердих побутових відходів із стандартних контейнерів до кузова, їх ущільнення, транспортування та механізованого вивантаження. Сміттєвоз включає надрамник, накопичувальний кузов, плиту штовхальну, маніпулятор-підйомник, коробку відбору потужності, гідросистему та електрообладнання. Завантаження твердих побутових відходів здійснюється за допомогою маніпуляторапідйомника через люк в кришці накопичувального кузова. Маніпулятор-підйомник і пульт керування робочими органами розміщені з правого боку машини. Маніпулятором здійснюють захоплення, підйом, перекидання, струшування та установку контейнера на місце. Переміщення сміття за шириною кузова здійснюють розрівнювачем. Ущільнюють сміття за допомогою штовхальної плити, яка періодично переміщує його до кришки. Привод робочих органів гідравлічний. [ЗАО Дормаш, м. Орел, Уралмаш, м. Челябінськ, http://www.dormashktd.com.ua/ko413.html]. В транспортному положенні системи вивантаження підйомник-маніпулятор встановлюється в вертикальному положенні вздовж відповідної бічної сторони накопичувавльного кузова. В результаті чого підйомник-маніпулятор та захоплювач, що розміщуються впритул до бокової сторони накопичувального кузова, виходять за загальні габарити ширини вантажівки з накопичувальним кузовом у зв'язку з їх габаритами щодо до поперечної 5 осі накопичувального кузова. Внаслідок цього, вихід за габарити в ширину, що спричинений системою вивантаження, пропорційно знижує загальну допустиму ширину кузова, що може використовуватися без перевищення максимально допустимих значень загальних габаритів у ширину вантажівки з кузовом. Зокрема, немає можливості використовувати кузов, ширина якого дорівнює максимально допустимій габаритній ширині вантажівки, оскільки система вивантаження вже займатиме частину цієї допустимої габаритної ширини. Таким чином, накопичувальна місткість кузова обмежується. Маніпулятор-підйомник встановлено безпосередньо на шасі вантажівки, через що відповідна частина шасі піддається значним зусиллям при функціонування системи випорожнення і зрештою розривається. Поздовжні пересування виконуються за допомогою гідроциліндрів, які сприяють тому, що не використовується простір на кінцях. В основу корисної моделі поставлено задачу удосконалення сміттєвоза з системою вивантаження та накопичення, що дозволило би використання кузова, ширина якого буде наближатись до максимально допустимої габаритної ширини вантажівки при тому, що в транспортному положенні при складеному маніпуляторові-підйомникові він не виступатиме за межі максимально допустимої габаритної ширини вантажівки з накопичувальним кузовом, що, в свою чергу, підвищує надійність конструкції. Поставлену задачу вирішують тим, що у сміттєвозі, який включає вантажівку, обладнану системою вивантаження та накопичення, що містить з одного боку накопичувальний кузов для накопичення вмісту контейнера та з іншого боку - пристрій випорожнення контейнера, який включає принаймні одну систему випорожнення контейнера, що містить принаймні один маніпуляторпідйомник, обладнаний на одному зі своїх країв захоплювачем для можливості після захоплення контейнера його підйому та випорожнення в накопичувальний кузов вантажівки, згідно з корисною моделлю, накопичувальний кузов складається в змонтованому на шасі стані з двох бічних сторін, що є вертикальними, відділеними одна від одної днищем, паралельні до повздовжньої осі накопичувального кузова, що відповідає повздовжній осі вантажівки та виконані на відстані ширини накопичувального кузова, маніпулятор-підйомник установлено на основі системи випорожнення контейнера, що має на іншому своєму краю - осьове з'єднання з маніпулятором-підйомником, система випорожнення контейнера містить також пристосування переміщення та напрямні елементи основи вздовж фіксованого напрямного елемента і в заданому напрямку переміщення, осьове з'єднання виконано з можливістю забезпечення руху маніпулятора-підйомника навколо осі, що є перпендикулярною до напрямку переміщення, при цьому накопичувальний кузов і пристосування переміщення виконано з можливістю переміщення основи між розгорнутою позицією, при якій осьове з єднання маншулятора-підйомника розміщене поза 51532 6 фіксованим напрямним елементом основи та іншою -згорнутою позицією, при якій осьове з'єднання маніпулятора-підйомника розміщене в інтервалі, що визначається краями фіксованого напрямного елемента основи. Система випорожнення контейнера розміщена в накопичувальному кузові з відповідним отвором, виконаним в бічній стороні, крізь який виходить маніпулятор-підйомник, причому отвору обладнана вздовж своєї внутрішньої сторони, яка формується стороною, що слугує днищем, вирізом чи заглибиною в боковому та повздовжньому напрямах достатньою для розміщення захоплювача, що спрямовано вертикально в напрямку до низу, із запасом чи врівень по відношенню до відповідної бічної сторони (6) накопичувального кузова. Система вивантаження та накопичення обладнана внутрішньою плитою компактування, що розміщена в поперечній площині по відношенню до бічних сторін накопичувального кузова та формує перед собою разом зі сторонами накопичувального кузова камеру накопичення, при цьому плита компактування виконана з можливістю переміщення всередині накопичувального кузова у відповідності до напряму, що є паралельним по відношенню повздовжньої осі накопичувального кузова, для компактування накопиченого вмісту в камері накопичення, причому пристосування випорожнення розміщено в об'ємі накопичувального кузова, який відділено плитою компактування від камери накопичення без зменшення об'єму накопичення. Пристосування переміщення та напрямні елементи включають зубчату рейку, яку розміщену вздовж напрямку переміщення і зубці якої утворюють зубчату передачу з зубцями шестерні, виконаної з можливістю обертання двигуном, установленим на основі для забезпечення можливості переміщення основи в тому чи іншому напрямку вздовж фіксованого напрямного елемента. Основа включає проміжну деталь, до якої закріплено на осьовому з'єднанні маніпуляторпідйомник для утворення осьового з'єднання системи підйому маніпулятора-підйомника, проміжну деталь установлено на станині, яка сполучена з пристосуваннями переміщення для забезпечення можливості переміщення основи системи випорожнення контейнера, при цьому проміжну деталь встановлено за допомогою осьового з'єднання навколо перпендикулярної осі до напрямку переміщення основи та перпендикулярної осі по відношенню до осі осьового з'єднання системи підйому маніпулятора-підйомника. Маніпулятор-підйомник обладнано основною, подовжувальною секціями та крайньою секцією із захоплювачем, яку встановлено на осьовому з'єднанні по відношенню до інших секцій маніпулятора-підйомника вздовж осі, що є паралельною по відношенню до осі осьового з'єднання системи підйому маніпулятора-підйомника для забезпечення можливості направлення захоплювача. Захоплювач установлено вільно із застосуванням гідроциліндра системи компенсації на осьовому з'єднанні на крайній секції, що закріплена на осьовому з'єднанні до маніпулятора 7 підйомника вздовж осі, що є паралельною по відношенню до осі осьового з'єднання крайньої секції маніпулятора-підйомника із заданим діапазоном кутового повороту. Виконання пристосування переміщення з можливістю переміщення основи системи випорожнення контейнера розгорнутою позицією, при якій осьове з'єднання маніпулятора-підйомника розміщене поза фіксованим напрямним елементом основи та іншою — згорнутою позицією, при якій осьове з'єднання маніпулятора-підйомника розміщене в інтервалі, що визначається краями фіксованого напрямного елемента основи, дозволяє закріплювати систему випорожнення контейнера до накопичувального кузова, який має більшу ширину у порівнянні з прототипом. Можливість розміщення осьового з'єднання системи підйому в інтервалі довжини фіксованого напрямного елемента дозволяє заводити маніпулятор-підйомник, принаймні частково, а по можливості повністю, в цей інтервал. Таким чином, з'являється можливість шляхом розміщення пристосувань переміщення та направлення в накопичувальному кузові чи під накопичувальним кузовом без зменшення об'єму накопичення виконати пристосування випорожнення так, що маніпулятор-підйомник у згорнутому положенні не виходитиме за межі ширини накопичувального кузова, що дозволяє використовувати накопичувальний кузов, ширина якого дорівнює максимально допустимій габаритній ширині вантажівки. Завдяки мобільній фіксації основи системи випорожнення контейнера з'являється можливість складати маніпулятор-підйомник у проміжок у ширину вантажівки при згорнутому положенні системи випорожнення і, в той же час, мати змогу в повній мірі використовувати пристосування випорожнення в розгорнутому положенні, при якому маніпулятор-підйомник та захоплювач можуть вільно рухатися для захоплення та випорожнення контейнера. Таким чином, маніпулятор-підйомник може розміщуватися при згорнутому положенні на 50 %, можливо на 75 % та бажано на 100 % своєї довжини в інтервалі довжини, що визначається фіксованим напрямним елементом. Кріплення системи випорожнення до накопичувального кузова крізь приймальний отвір, що виконується в бічній стінці, крізь який виходить маніпулятор-підйомник системи випорожнення, дозволяє спрямувати зусилля на накопичувальний кузов з його подальшим переносом на шасі машини, а не безпосередньо на шасі машини, що знижує ризик розриву шасі машини. Розміщення системи випорожнення в частині об'єму накопичувального кузова, що відділений внутрішньою плитою компактування і формує перед собою зі сторонами накопичувального кузова камеру накопичення, не зменшує камери накопичення, як це є в прототипі. Корисна модель пояснюється рисунками. На Фіг. 1 зображено загальний вигляд вантажівки, що обладнана пристроєм випорожнення контейнера, при згорнутому положенні маніпулятора-підйомника; 51532 8 на Фіг. 2 - вигляд збоку системи випорожнення та контейнера Фіг. 1; на Фіг. 3 - загальний вигляд вантажівки при розгорнутому положенні маніпулятора-підйомника та в процесі підйому контейнера; на Фіг. 4 - вигляд збоку системи випорожнення контейнера Фіг. 3; на Фіг. 5 - загальний вигляд сміттєвоза при розгорнутому положенні маніпулятора-підйомника та в піднятому стані вздовж відповідної бічної сторони накопичувального кузова для випорожнення контейнера в накопичувальний кузов; на Фіг. 6 - вигляд збоку системи випорожнення та контейнера Фіг. 5; на Фіг. 7 - фрагмент загального вигляду верхньої частини системи випорожнення в згорнутому положенні маніпулятора-підйомника, при цьому напрямні елементи представлені лише з одного боку маніпулятора-підйомника; на Фіг. 8 - вигляд збоку системи випорожнення Фіг. 7. Сміттєвоз складається з вантажівки 1 з накопичувальним кузовом 2, призначеним для накопичення вмісту контейнера 3. Накопичувальний кузов 2, який змонтовано на шасі 4 вантажівки 1, має дві бічні 5, 6 сторони, які є вертикальними і розділені стороною, що формує днище (не показано), а також паралельні повздовжній осі накопичувального кузова 2, що відповідає повздовжній осі вантажівки 1. Приймальний отвір 7 обладнано у верхній 8 стороні накопичувального кузова 2. Бічні 5, 6 сторони розмежовані між собою відстанню, що відповідає ширині L3 накопичувального кузова 2. Сміттєвоз включає також пристрій для випорожнення контейнера 3, що складається принаймні з системи 9 випорожнення контейнера 3, яка включає принаймні один маніпулятор-підйомник 10, який обладнано на одному зі своїх країв захоплювачем 11 та має з іншого свого краю осьове кріплення підйому LEV, навколо осі, що є, в тій чи іншій мірі, паралельною повздовжній осі накопичувального кузова 2, з основою 12 системи 9 випорожнення контейнера 3, на якій встановлено маніпулятор-підйомник 10. Пристрій випорожнення контейнера 3 також включає пристосування 13 переміщення основи 12 системи 9 випорожнення в заданому напрямку переміщення ТR2(Фіг. 7 та Фіг. 8). Пристосування 13 переміщення виконані таким чином, щоб забезпечити можливість переміщення основи 12 і системи 9 випорожнення контейнера повністю між розгорнутим положенням, при якому осьове з'єднання LEV підйому маніпулятора-підйомника 10 розміщується поза межами інтервалу, що визначається шириною накопичувального кузова 2 (Фіг. 3 та Фіг. 3) та згорнутим положенням, при якому осьове з'єднання LEV підйому маніпулятора-підйомника 10 розміщується в межах інтервалу, що визначається шириною L3 накопичувального кузова 2 (Фіг. 1 та Фіг. 2), тобто проекція розташування осьового з'єднання LEV у напрямку ширини накопичувального кузова 2, що називається поперечним напрямком, розміщується на зазначеному проміжку ширини. Поперечний напрямок відповідає при встановленій системі 14 9 вивантаження та накопичення на вантажівці 1 горизонтальному напрямку, перпендикулярному повздовжньому напрямку вантажівки 1. Іншими словами, при розгорнутому положенні, осьове з'єднання LEV виходить за межі бічної сторони 6 накопичувального кузова 3 назовні. Система 9 випорожнення розташована в накопичувальному кузові 2, тобто над стороною, що становить днище накопичувального кузова 2. Для цього виконано отвір 15 в бічній стороні 6, крізь який виходить маніпулятор-підйомник 10 підйому системи 9 випорожнення. Рамка отвору 15, що виконана в бічній стороні 6 накопичувального кузова 2 та слугує для окреслення отвору 15 для заходу маніпулятора-підйомника 10 в накопичувальному кузові 2, обладнана вздовж своєї нижньої сторони, яка формується стороною, що слугує днищем, вирізом чи заглибиною 16 в боковому та повздовжньому напрямках, достатньою для розміщення захоплювача 11, які спрямовані вертикально в напрямку донизу, із запасом чи врівень із відповідною бічною 6 стороною накопичувального кузова 2. Така конфігурація накопичувального кузова 2 дозволяє маніпуляторові-підйомнику 10 та захоплювачу 11, що в даному випадку мають вигляд кліщового захоплювача, не виходити по поперечному напрямку за межі відповідної бічної 6 сторони накопичувального кузова 2. Іншими словами, отвір 15 продовжується іншим отвором 16 до кінця накопичувального кузова 2 в ширину для забезпечення можливості заведення захоплювача 11, принаймні частково, під накопичувальний кузов 2. Накопичувальний кузов 2 включає внутрішню компактувальну плиту (не показано), що розміщена в поперечній площині відносно бічних 5, 6 сторін накопичувального кузова 2 та формує перед собою разом зі сторонами накопичувального кузова 2 камеру накопичення. Компактувальна плита може переміщатися всередині накопичувального кузова 2 відповідно до напрямку, що є паралельним щодо повздовжньої осі накопичувального кузова 2 для компактування накопиченого вмісту в камері накопичення. При цьому система 9 випорожнення розміщується в решті об'єму накопичувального кузова 2, що відділений компактувальною плитою від камери накопичення. Компактувальна плита є нахиленою по відношенню до днища накопичувального кузова 2. Пристосування 13 переміщення також сполучені з напрямними елементами 17 основи 12 системи 9 випорожнення вздовж фіксованого напрямного елементу 18 та відповідно до напряму переміщення TR2. Переміщення та направлення основи 10 системи 9 випорожнення здійснюють шляхом переміщення основи 12. При приєднаному пристрою випорожнення до накопичувального кузова 2, напрям переміщення TR2 основи 10 системи 9 випорожнення, в тій чи іншій мірі, відповідає поперечному напряму накопичувального кузова 2 (Фіг. 4), тобто, в тій чи іншій мірі, горизонтальному напряму та поперечному повздовжньому напряму (чи напряму руху вперед) вантажівки 1. При розгорнутому положенні основи 12 системи 9 випорожнення контейнера З осьове з'єднання 51532 10 LEV підйому розміщується у відповідності до напряму переміщення TR2, поза межами фіксованого напрямного елемента 18 основи 12 системи 9 випорожнення та при згорнутому положенні осьове з'єднання LEV підйому маніпуляторапідйомника 10 розташоване у відповідності до напряму переміщення, в межах інтервалу, що визначається крайніми точками фіксованого напрямного елемента 18 основи 12 системи 9 випорожнення, тобто проекція положення осьового з'єднання LEV на відрізок фіксованого напрямного елемента 18 перебуває в межах між двома крайніми точками фіксованого напрямного елемента 18. Фіксований напрямний елемент 18. в тій чи іншій мірі, відповідає допустимому ходу переміщення системи 9 випорожнення за допомогою пристосування 13 переміщення без врахування станини 19. Система вивантаження та накопичення також обладнана засобами фіксації до накопичувального кузова 2, напрямними елементами 17. Засоби фіксації формуються (Фіг. 7) за допомогою пластин 20, розміщених на краях напрямних елементів 17, що дозволяють зафіксувати їх до бічних сторін 5, 6 накопичувального кузова 2. Осьове з'єднання LEV забезпечує артикуляцію маніпулятора-підйомника 10 навколо осі, що є, в тій чи іншій мірі, перпендикулярною по відношенню до напрямку переміщення TR2 основи 12 системи 9 випорожнення та паралельно напрямній площині, що формується напрямними елементами 17. Пристосування 13 переміщення включають зубчасту рейку 21, яка проходить вздовж напряму переміщення TR2 і зубці якої утворюють зубчасту передачу з зубцями шестерні 22, що приводиться в обертовий рух двигуном (не показано), який встановлений на основі 12 системи 9 випорожнення для забезпечення переміщення основи 12 в одному чи іншому напрямку вздовж фіксованого напрямного елемента 18. Двигун може обертатися в напрямку, що дозволяє зубцям шестерні 22 утворити зубчасту передачу з зубцями зубчастої рейки 21 та переміщати систему 9 випорожнення для забезпечення розташування осьового з'єднання підйому LEV та маніпулятора-підйомника 10, який обладнано захоплювачем 11, поза межами фіксованого напрямного елемента 18 основи 12 системи 9 випорожнення. З іншого боку, двигун має змогу обертатися в зворотному напрямі, що дозволяє зубцям шестерні 22 утворити зубчасту передачу із зубцями зубчастої рейки 21 в іншому напрямі з метою забезпечення згортання осьового з'єднання LEV та принаймні частини маніпуляторапідйомника 10, бажано маніпулятора підйомника 10 повністю, в межі інтервалу з довжиною, що визначається фіксованим напрямним елементом 18. Фіксовані напрямні елементи 18 основи 12 розгортаються вздовж напряму переміщення TR2 основи 12. Зокрема, напрямні елементи 17 формуються двома сторонами, що розміщені з обох боків основи 12 системи 9 випорожнення. Кожна сторона має вигин, що формує полоз та утворює фіксований напрямний елемент 18. В основному, вигин, що формує полози з кожного боку, є V 11 подібним профілем, оберненим в напрямку до іншої сторони, на якому розміщується частина основи 12, що заповнює V-подібний вигин, здатна ковзати вздовж полозу. Сторони фіксованого напрямного елемента 17 обладнані засобами регулювання відстані між ними. Таким чином, кожна сторона сполучена з іншою стороною за допомогою стержнів 23 з різьбою, що дозволяють за допомогою гайок регулювати відстань між сторонами для регулювання свободи ковзання основи 12 системи 9 випорожнення вздовж сторін фіксованого напрямного елемента 17. Крізь зубчасту рейку 21 поблизу кожного з її країв проходять стрижні 23 з різьбою і таким чином слугують засобами фіксації зубчастої рейки 21. Відтань між зубчастою рейкою 21 та сторонами 17 також регулюється за допомогою гайок, що розміщені з обох боків зубчастої рейки 21 на стержнях 23 з різьбою, що утримують зазначену зубчасту рейку 21. В боковому напрямі довжина напрямних елементів 17, в тій чи іншій мірі, дорівнює ширині навантажувального кузова 2. У відповідності до Фіг. 7 та Фіг. 8 основа 12 системи вивантаження містить проміжну деталь 24, на яку змонтовано на осьовому з'єднанні LEV маніпулятор-підйомник 10 і формує згадане осьове з'єднання LEV підйому контейнера 3 маніпулятора-підйомника 10. Проміжна деталь 24 встановлена на станіну 19, яка сполучена з пристосуванням 13 переміщення для забезпечення переміщення основи 12 системи 9 випорожнення. Зокрема, на станіні 19 встановлено шестірню 22, що приводиться в рух для утворення зубчастого з'єднання з зубцями зубчастої рейки 21. Проміжна деталь 24 установлена на осьовому з'єднанні навколо осі PIVB, вертикальна в робочому положенні, перпендикулярна напряму переміщення TR2 основи 12 та перпендикулярна осі осьового з'єднання LEV підйому. Проміжна деталь 24 здатна рухатися навколо осі в кутовому діапазоні порядку 30° центрованому на напряму переміщення TR2 маніпулятора-підйомника 10 для забезпечення руху маніпулятора-підйомника 19, обладнаного захоплювачем 11 навколо вертикальної осі + 157 -15 ° з одного та іншого боку напряму переміщення системи 9 випорожнення. Маніпулятор-підйомник 10 формується з так званої основної секції 25, що встановлена на осьовому з'єднанні на основі 12, утворюючи осьове з'єднання LEV підйому та подовжувальної секції 26, що встановлена у вигляді телескопічного з'єднання на основну секцію 25. Таким чином, подовжувальна секція 26 може рухатися вздовж секції 25, ковзаючи, для адаптації довжини маніпулятора-підйомника 10 для забезпечення захоплення контейнера 3 на різних дистанціях. Маніпулятор-підйомник 10 має також рухому кінцеву секцію 27, на яку встановлені захоплювач 11, що встановлено вільно на осьовому з'єднанні по відношенню до секцій 25, 26 маніпуляторапідйомника 10, по осі PIV11C, що є паралельною до осі осьового з'єднання LEV підйому маніпулятора-підйомника 10, для забезпечення спрямування захоплювача 11. 51532 12 Така рухома кінцева секція 27 маніпуляторапідйомника 10 дозволяє, зокрема, направляти донизу захоплювач 11 для захоплення контейнера 3 за верх шляхом захоплення одного з його боків. Дана рухома кінцева секція 27 дозволяє, зокрема, направляти догори захоплювач 11 у поєднанні з підйомом маніпулятора-підйомника 10 для доведення контейнера 3 до положення випорожнення над накопичувальним кузовом 2. У згорнутому положенні системи 9 випорожнення, секції 25, 26, що розміщуються між основою 12 та рухомою кінцевою секцією 27 маніпуляторапідйомника 10, може розміщуватися вздовж фіксованого напрямного елемента 18, паралельно напрямку переміщення TR2 та рухомій кінцевої секції 27, розміщуючись в інтервалі довжини, що відповідає фіксованому напрямному елементу 18, може опускатися з метою доведення захоплювача 11 під полози напрямних елементів 17. Осьові та телескопічні з'єднання маніпулятора-підйомника 10 та його секцій, сполучених між собою, приводяться в рух за допомогою гідроциліндрів (не показано), один з яких може також приводити в рух захоплювач 12, тобто забезпечувати замикання та розмикання його губ. Захоплювач 12 установлено вільно на осьовому з'єднанні рухомої кінцевої секції 27 маніпулятора-підйомника 10 вздовж осі PIV12, що є паралельною осі осьового з'єднання PIV11C рухомої кінцевої секції 27 маніпулятора-підйомника 10, із заданим кутовим діапазоном. Кутовий діапазон вільного осьового з'єднання захоплювача 11 визначається двома обмежувачами 28, 29 для обмеження руху по кутовому діапазоні, встановлені на захоплювачу 11, пристосовані для сполучення з блокувальними обмежувачами 30 рухомої кінцевої секції 27 маніпулятора-підйомника 10, на якій встановлено захоплювач 11. Вільний діапазон руху захоплювача 11 між обмежувачами 28 та 29 розрахований таким чином, щоб забезпечити, при горизонтальному положенні маніпуляторапідйомника 10, вертикального положення захоплювача 11 в нижньому напрямку під дією його власної ваги, що дозволяє легко завести захоплювач 11 під полози напрямних елементів 17. У згорнутому положенні захоплювач 11 може виходити, бажано незначно, вздовж поперечної осі з інтервалу, який визначається фіксованим напрямним елементом 18 та/чи шириною накопичувального кузова 2, при цьому не виходячи за межі максимально дозволених габаритів вантажівки 1 в ширину. В такому випадку, ширина накопичувального кузова 2 буде дещо меншою, ніж максимально дозволена габаритна ширина вантажівки 1. З'єднання між маніпулятором-підйомником 10 та захоплювачем 11 є децентрованим для забезпечення позиціювання захоплювача 11 навпроти приймального отвору 7 в піднятому положенні маніпулятора-підйомника 10 вздовж бічної сторони 6 в такий спосіб, щоб контейнер 3, який утримується захоплювачем 11, міг бути випорожнений в приймальний отвір 7. Гідроциліндри (не показані), що забезпечують рух осьового з'єднання рухомої кінцевої секції 27 та телескопічного з'єднання секцій 25 та 26 таким чином розміщуються з протиле 13 жного боку від захоплювача 11 по відношенню до повздовжньої осі маніпулятора-підйомника 10 для збалансування зусиль, що впливають на маніпулятор-підйомник 10 і уникнути його згинання. Сукупність пристосувань випорожнення та накопичення призначена для встановлення на вантажівку 1, переважно вантажівку-самоскид. Габаритна ширина вантажівки повинна бути меншою або дорівнювати відповідному максимально допустимому значенню. Таке максимально допустиме значення габаритної ширини вантажівки може різнитися в залежності від її типу та категорії. Завдяки концепції пристосування вивантаження у відповідності до винаходу, зокрема зважаючи на можливість переміщення системи вивантаження між згорнутою та розгорнутою позиціями, накопичувальний кузов 2 та пристосування 9 випорожнення можуть бути сконфігуровані таким чином, що в згорнутому положенні основи 12 системи 9 випорожнення, система 9 випорожнення, зокрема маніпулятор-підйомник 10 та захоплювач 11, не виходять за межі дозволеної габаритної ширини вантажівки 1. Також передбачено, що в транспортному положенні системи 9 випорожнення, тобто в згорну 51532 14 тому положенні, чи в положенні випорожнення контейнера 3, тобто в піднятому положенні маніпулятора-підйомника 10 вздовж накопичувального кузова 2, удари маніпулятора-підйомника 10 та/чи захоплювача 11 відповідно до бічних 5, 6 сторін накопичувального кузова 2 та шасі 4 вантажівки 1 амортизуються за допомогою амортизаційних пристосувань на зразок каучукових елементів, розміщених в зонах накопичувального кузова 2 та шасі 4, які можуть мати контакт з маніпуляторомпідйомником 10 та/чи захоплювачем 11. Також передбачається, що в згорнутому положенні системи 9 випорожнення захоплювач 11 заводять впритул до елемента амортизації, розміщеного на шасі 4 вантажівки 1 чи на накопичувальному кузові 2, який утримує захоплювач 11 нерухомим завдяки фіксації одного з обмежувачів 28, 29 відповідним блокувальним обмежувачем 30 маніпулятора-підйомника 10. Обмежувачі 28, 29 та блокувальний обмежувач 30 розміщені таким чином, щоб в горизонтальному положенні маніпулятора-підйомника 10 чи його частковому нахилу захоплювач 11 спрямовувався у вертикальне положення донизу під дією його власної ваги. 15 51532 16 17 Комп’ютерна верстка І.Скворцова 51532 Підписне 18 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП ―Український інститут промислової власності‖, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюGarbage truck
Автори англійськоюOlivier Billon, Philippe Fichaux
Назва патенту російськоюМусоровоз
Автори російськоюБийон Оливье, Фишо Филипп
МПК / Мітки
МПК: B65F 3/02
Мітки: сміттєвоз
Код посилання
<a href="https://ua.patents.su/9-51532-smittehvoz.html" target="_blank" rel="follow" title="База патентів України">Сміттєвоз</a>
Спосіб резервного водопостачання
Номер патенту: 27090
Опубліковано: 10.10.2007
Автори: Товт Еміліян Васильович, Копич Михайло Віталійович
МПК: E03B 1/00
Мітки: спосіб, водопостачання, резервного
Формула / Реферат:
Спосіб резервного водопостачання, що включає примусове наповнення водою накопичувального резервуара від системи центрального водопостачання, який відрізняється тим, що воду від системи центрального водопостачання подають через кран, трійник та фільтр грубої очистки до накопичувального резервуара, а через регулюючий клапан - до споживача, у накопичувальному резервуарі рівень води регулюється за допомогою поплавкового клапана, а баланс тиску в...
Підкладочний килимок до комп’ютерного маніпулятора типу “миша”
Номер патенту: 1141
Опубліковано: 15.01.2002
Автор: Кравцов Сергій Георгійович
МПК: G06T 11/80, G06F 3/033
Мітки: типу, підкладочний, комп'ютерного, миша, килимок, маніпулятора
Формула / Реферат:
Підкладочний килимок до комп'ютерного маніпулятора типу "миша", що має площинну форму, який відрізняється тим, що матеріалом для його виготовлення є пробкова прескомпозиція на основі кори пробкового дуба.
Самоскидний транспортний засіб

Номер патенту: 30499
Опубліковано: 15.11.2000
Автори: Кисельов Олексій Васильович, Сабсай Володимир Давидович
МПК: B60P 1/04
Мітки: самоскидний, засіб, транспортний
Формула / Реферат:
Самоскидний транспортний засіб, який містить розміщений на рамі поворотний кузов з противагою, ось повороту якого розташована в вертикальній площині, та фіксатор транспортного положення кузова, який відрізняється тим, що противага виконана у вигляді сполучених ємностей для рідини, розташованих в передній і задній частині кузова, а вісь повороту проходить через центр ваги кузова.
Будівельний підйомник
Номер патенту: 19129
Опубліковано: 15.12.2006
Автор: Коваль Віталій Іванович
МПК: B66B 9/16
Мітки: підйомник, будівельний
Формула / Реферат:
Будівельний підйомник, що має щоглу, каретку з приводом її переміщення вздовж щогли і розміщену на каретці вантажонесучу монорейку з можливістю її переміщення поперек щогли, який відрізняється тим, що на каретці над монорейкою установлений шарнірний упор, один кінець якого з'єднаний з монорейкою, а другий - з віссю, яка заходить в паз каретки і з'єднана з канатом приводу підйомника.
Пристрій для розвантажування контейнерів в кузов сміттєвоза
Номер патенту: 39285
Опубліковано: 15.06.2001
Автори: Подольський Юхим Аврамович, Стельмашенко Анатолій Іванович, Петраков Іван Володимирович, Павлик Михайло Федорович
МПК: B65F 3/02
Мітки: кузов, пристрій, розвантажування, контейнерів, сміттєвоза
Формула / Реферат:
Пристрій для розвантажування контейнерів в кузов сміттєвоза, який містить в собі маніпулятор у вигляді шарнірно зчленованої з рамою сміттєвоза стріли і шарнірно закріплений на неї з можливістю поворота у вертикальній площині захват для контейнерів, кришку для закривання контейнера, кришку для закривання завантажувального отвору в кузові сміттєвоза, і гідроциліндри для управління відповідно стрілою, захватом і кришкою, який відрізняється тим,...
Попередній патент: Спосіб одержання засівного матеріалу у виробництві мікробіологічного бета-каротину
Наступний патент: Пристрій для випорожнення сміттєвих контейнерів
Випадковий патент: Спосіб скринінгової оцінки ступеня ризику виникнення донозологічних відхилень у стані психічного здоров'я підлітків