Спосіб прицілювання нашоломною системою цілевказування і пристрій для його здійснення
Номер патенту: 56413
Опубліковано: 15.02.2005
Автори: Черняк Сергій Іванович, Кадочніков Сергій Михайлович, Ліпунова Валентина Григорівна
Формула / Реферат
1. Спосіб прицілювання нашоломною системою цілевказування, в основу якого покладене сканування простору знаходження нашоломного вузла з n випромінюючими діодами плоскими оптичними віяловими променями, визначення первинних пеленгів на кожний з n випромінюючих діодів та положення n випромінюючих діодів у просторовій площині, яка проходить через реперні точки нашоломного вузла, в яких розташовані випромінюючі діоди, який відрізняється тим, що за значеннями первинних пеленгів визначають прискорення їх змін, знак прискорення, період зміни знака прискорення, інвертують значення прискорення зміни кожного первинного пеленга і отримані значення підсумовують з відповідним знаком з наступними значеннями первинних пеленгів, після чого за отриманими сумарними значеннями первинних пеленгів визначають положення лінії візування нашоломної системи цілевказування у просторі.
2. Пристрій прицілювання нашоломної системи цілевказування, що включає нашоломний вузол з випромінюючими діодами, розташований на захисному шоломі, скануючі блоки, блок визначення кодів пеленгів та пристрій визначення лінії візування, який відрізняється тим, що у нього введені лічильник періодів сканування і m пристроїв визначення і обліку тремора голови льотчика (оператора), кожний з яких з'єднаний з відповідним виходом блока визначення кодів пеленгів через перші схеми керування U, другі входи яких з'єднані з відповідними виходами лічильника періодів сканування, які є і другими входами других схем управління U, а виходи - зі входами регістрів первинних пеленгів, виходи яких з'єднані з першою схемою віднімання, з'єднаною виходами через другі схеми управління U з регістрами приросту, виходи яких з'єднані зі входами другої схеми віднімання, вихід якої з'єднаний зі входом пік-детектора і запам’ятовуючого пристрою, а вихід запам’ятовуючого пристрою з’єднаний з одним із входів суматора, другий вхід якого з'єднаний з відповідним виходом блока визначення кодів пеленгів, а третій - з виходом лічильника подільника, входом якого є вихід пік-детектора, а вихід суматора з'єднаний з одним із входів пристрою визначення лінії візування, при цьому вхід лічильника періодів сканування з'єднаний з одним із виходів скануючих блоків.
Текст
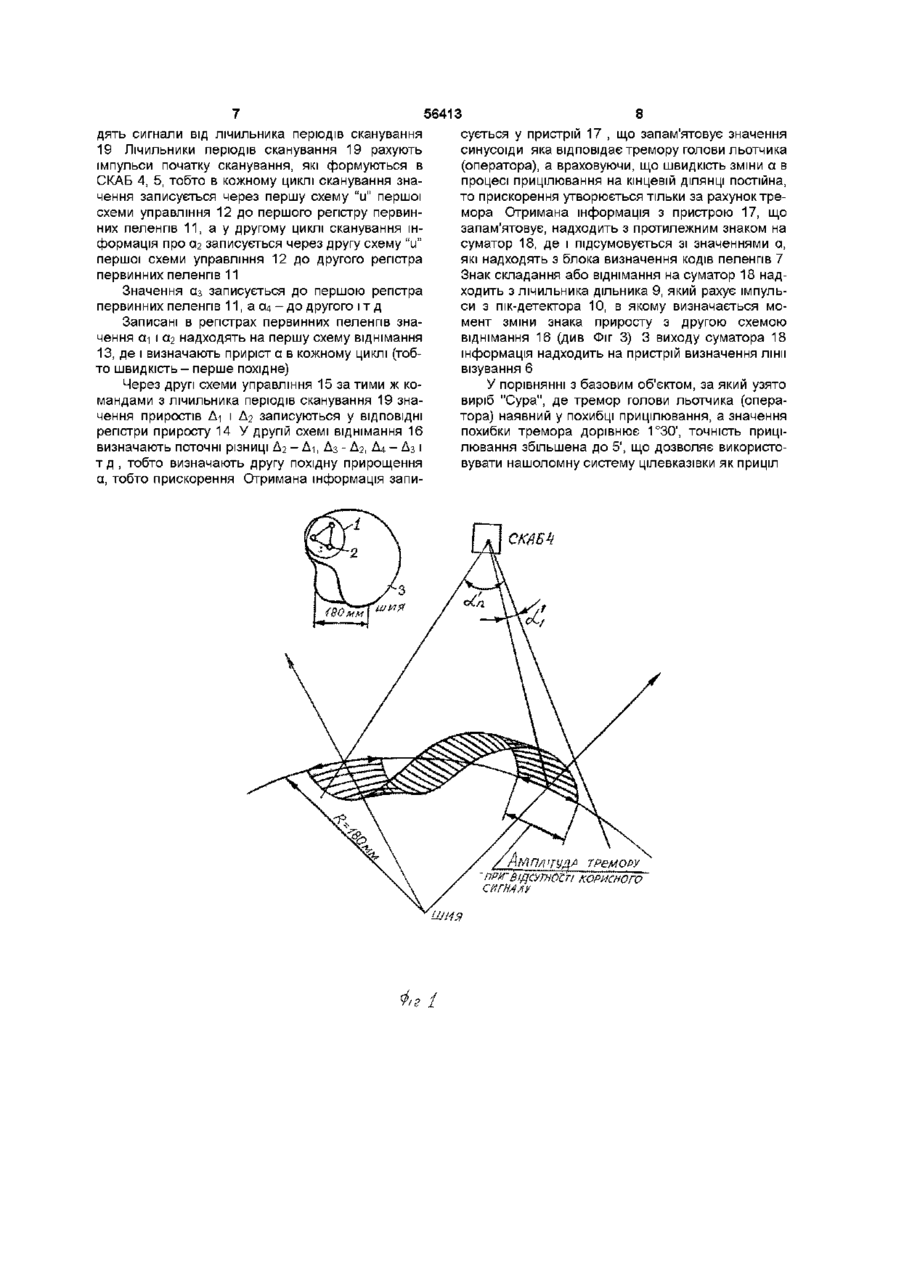
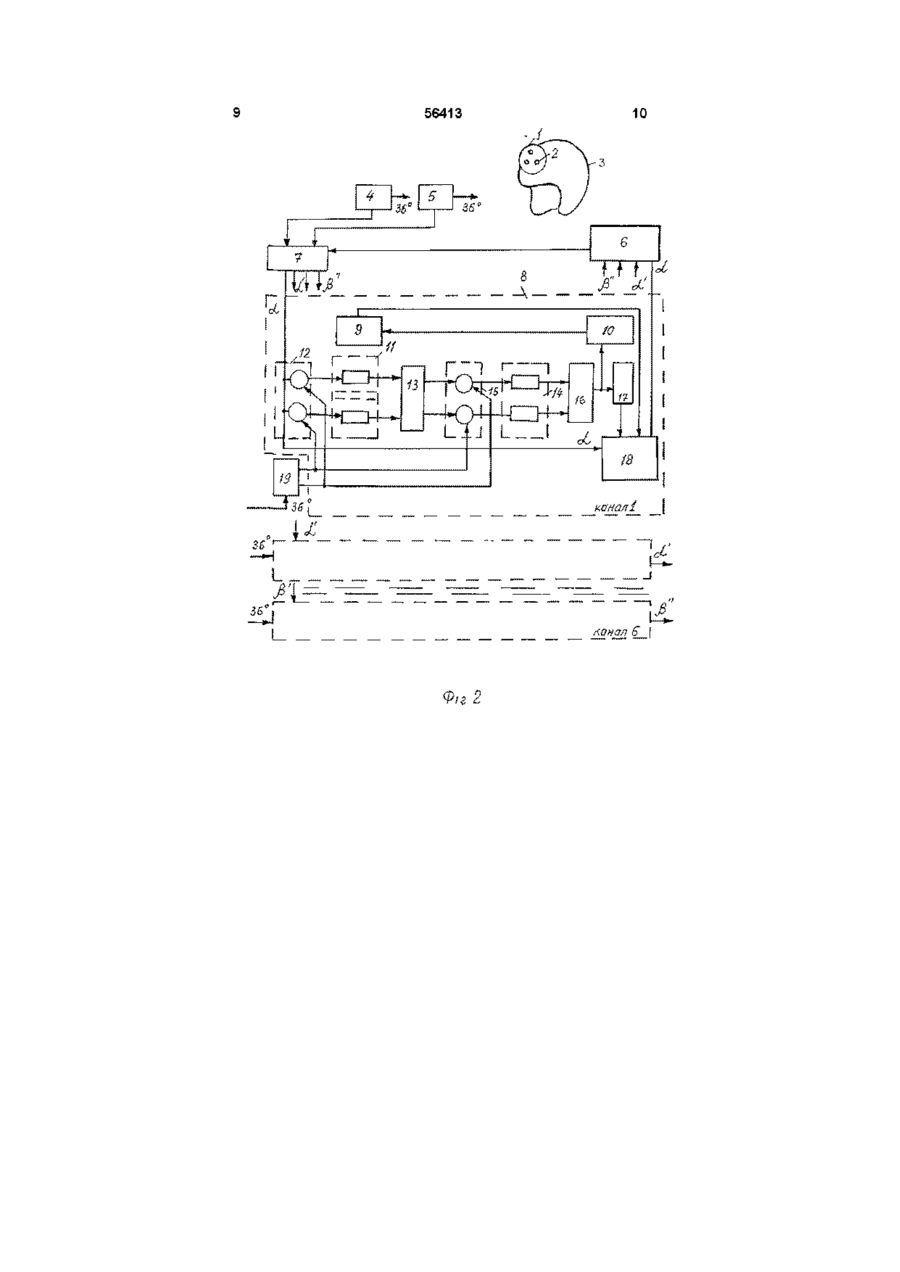
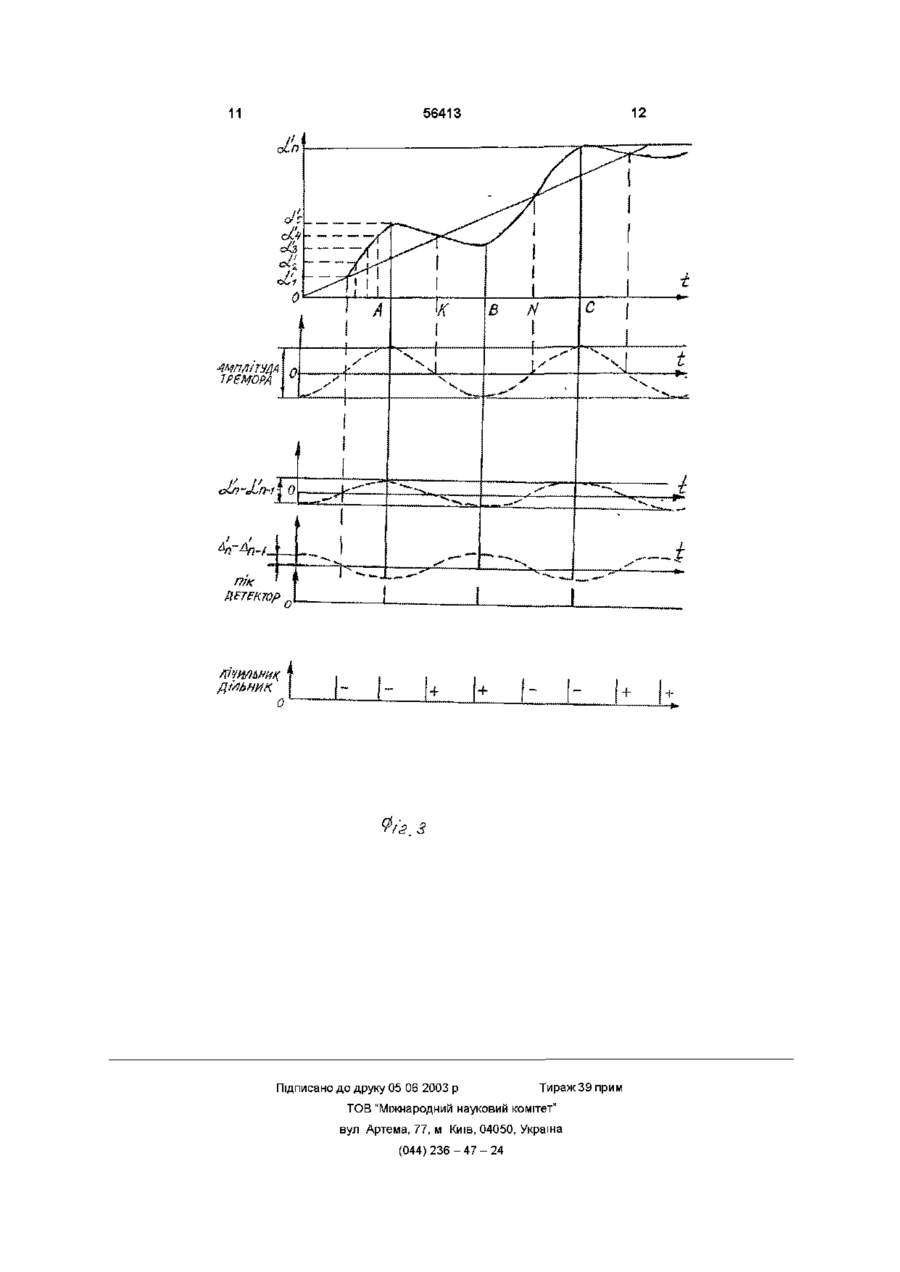
1 Спосіб прицілювання нашоломною системою цілевказівки, в основу якого покладено сканування простору знаходження нашоломного вузла з п випромінюючими діодами, плоскими оптичними віяловими променями, визначення первинних пеленгів на кожний з п випромінюючих ДІОДІВ та положення п випромінюючих ДІОДІВ у просторовій площині, яка проходить через реперні точки нашоломного вузла, в яких розташовані випромінюючі діоди, який відрізняється тим, що за значеннями первинних пеленгів визначають прискорення їх змін, знак прискорення, період зміни знака прискорення, інвертують значення прискорення зміни кожного первинного пеленга і отримані значення підсумовують з ВІДПОВІДНИМ знаком з наступними значеннями первинних пеленгів, за отриманими сумарними значеннями первинних пеленгів визначають положення лінії візування нашоломної системи цілевказівки у просторі 2 Пристрій прицілювання нашоломної системи цілевказівки, до якого входять нашоломнии вузол з випромінюючими діодами, розташований на захисному шоломі, скануючі блоки, блок визначення кодів пеленгів та пристрій визначення лінії візування, який відрізняється тим, що у нього є лічильник періодів сканування і m пристроїв визначення і обліку тремора голови льотчика (оператора), кожний з яких з'єднано з ВІДПОВІДНИМ ВИХОДОМ бло ка визначення кодів пеленгів через перші схеми керування U, другі входи яких з'єднано з ВІДПОВІДНИМИ виходами лічильника періодів сканування, які є і другими входами других схем управління U, а виходи зі входами регістрів первинних пеленгів, виходи яких з'єднано з першою схемою віднімання, з'єднаною виходами через другі схеми управління U з регістрами приросту, виходи яких з'єднано зі входами другої схеми віднімання, вихід якої з'єднано зі входом пік-детектора і запам'ятовуючого пристрою, а вихід запам'ятовуючого пристрою з'єднано з одним із входів суматора, другий вхід якого з'єднано з ВІДПОВІДНИМ виходом блока визначення кодів пеленгів, третій - з виходом лічильника дільника, входом якого є вихід пік-детектора, а вихід суматора з'єднано з одним з входів пристрою визначення лінії візування, при цьому вхід лічильника періодів сканування з'єднано з одним з виходів скануючих блоків СО 5 (О Ю Винахід відноситься до оптико-механічних та оптико-електронних пристроїв і може бути використаний в системах наведення і системах управління авіаційними комплексами Нам відомо спосіб визначення орієнтації осі візира, патент США № 3 375 375, який полягає в тому, що за допомогою скануючих фотоприймальних блоків визначають кутове положення джерел випромінювання (фотоелементів (ФЕ) методом поелементної пеленгації Визначають площину у просторі, яка проходить через ФЕ, і установлюють до неї перпендикуляр, який є колінеарним осі візира Нам ВІДОМІ оптико-електронні пристрої диста нційного визначення орієнтації нашоломного візира, патенти США №№3 678 823, 4 209 254, 3 375 375, 3 917 412, а с СССР №214499, патенти Франції №№2 076 693, 2 168 425, виконані за схемою поелементної пеленгації джерел випромінювання ФЕ, розташованих на захисному шоломі і орієнтованих відносно осі візира таким чином, коли за сигналом кутів-пеленпв, які визначаються скануючими фотоприймальними блоками, розраховують просторове положення джерел випромінювання, тобто і кутове положення оптичної осі нашоломного візира Недоліком відомих способів і пристроїв (аналогів) є недостатня для вирішення задач прицілю 56413 ня ЦІЛІ Аналізуючи величину похибки, яку спричивання точність визначення положення лінії візуняє тремор, зрозуміло, що вона є головною і подавання льше зменшення інструментальної похибки Найбільш близьким за технічною суттю до занашоломної системи цілевказівки (НСЦ) не має пропонованого є спосіб визначення орієнтації осі сенсу без усунення похибки тремора візира (див технічну документацію на виріб "Сура", Свідоцтво виняткової правомочності КП "ЦКБ Тремор має установочні і основні коливання "Арсенал", ВП № 780), узятий за прототип Установочні коливання можна не брати до уваги, тому що стабілізація тремора, тобто перехід до Суть відомого способу полягає в тому, що за основних коливань, відбувається у перші 5с допомогою скануючих фотоприймальних блоків польоту При всій динамічності і великій КІЛЬКОСТІ (СКАБ каналу А і СКАБ каналу Б) визначають поваріантів показників існує особиста сталість треложення випромінюючих ДІОДІВ у просторі за пермора, тобто стабільний ритм тремора для кожного винними кутами-пеленгами на кожний випромінюльотчик (оператора) при певних умовах роботи ючий діод, визначають площину у просторі, яка проходить через ФЕ і визначають перпендикуляр Для вирішення поставленої задачі у відомому до даної площини способі визначення орієнтації осі візира, в основу якого покладено сканування простору, в якому Недоліком способу-прототипу є недостатня знаходиться нашоломний вузол з п випромінююдля вирішення задач прицілювання точність вичими діодами, плоскими оптичними віяловими значення положення лінії візування променями, визначення первинних пеленгів на Відома система визначення осі візира (див кожний з п випромінюючих ДІОДІВ та положення п технічну документацію на виріб "Сура", Свідоцтво випромінюючих ДІОДІВ у просторовій площині, яка виняткової правомочності КП "ЦКБ "Арсенал", ВП проходить через реперні точки нашоломного вуз№ 780), яку взято за прототип ла, в яких розташовані випромінюючі діоди, за Відома система складається з нашоломного значеннями первинних пеленгів визначають привузла, до складу якого входять випромінюючі діоскорення зміни значень пеленгів, знак зміни приди, двох скануючих блоків (СКАБ), які перетворюскорення, період зміни знака прискорення, інверють оптичні сигнали від випромінюючих ДІОДІВ в тують значення прискорення зміни кожного електричні, блока визначення кодів пеленгів, який первинного пеленга і отримані значення підсумовизначає значення первинних пеленгів на випровують з ВІДПОВІДНИМИ значеннями первинних пемінюючі діоди (ВД) - а, а', а", р, р', р", пристрою ленгів, за отриманим сумарним значенням первизначення положення лінії візування (Gz, Gy) в винних пеленгів визначають положення лінії системі координат об'єкта візування у просторі Похибка визначення положення лінії візування складається з інструментальної похибки пристрою Таким чином здійснюють обчислення полота похибки через тремор голови льотчика (операження лінії візування з урахуванням компенсації тора) в процесі прицілювання Тремор голови льотремора голови льотчика (оператора) тчика (оператора) під час польоту складає 1°30' Основною передумовою для цього є те, що при основній частоті 0,1-1,5Гц (за даними інституту тремор має зворотнопоступальний рух, період і авіаційної і космічної медицини НИИАКМ, м Москамплітуда для кожного індивіда та умови експлуава) тації ПОСТІЙНІ, відстеження на останньому відрізку стеження за ціллю відбувається з постійною швидТаким чином похибка тремора є домінуюкістю, тобто па цій ДІЛЬНИЦІ усі коливання лінії візучою у сумарній похибці визначення положення вання відбуваються тільки через тремор голови лінії візування (інструментальна похибка десь і 10 ) Значення тремора голови льотчика (оператоТаким чином, недоліком системи прототипу є ра) визначають так недостатня для вирішення задач прицілювання Два оптичних блока сканують плоскими віялоточність вими оптичними променями нашоломний вузол Усі зміщення нашоломного вузла у вертикальній При розробці способу прицілювання нашолоплощині, при даному принципі визначенім його мною системою цілевказівки, який заявляється, положення, не враховуються, а горизонтальні вивирішувалась задача компенсації похибки визназначають шляхом обчислення первинних пеленгів, чення положення лінії візування, яка спричиняєтьв значеннях яких є і значення тремора ся тремором голови льотчика (оператора) і дорівнює 1 °30' при частоті 0,1-1,5Гц При цьому Визначаємо приріст значень первинних пеленскладність полягає в тому, що частота тремора гів у кожному періоді сканування (визначаємо дорівнює частоті корисного сигналу супроводженшвидкість зміщення лінії візування) для першого скануючого блока ДЛЯ ДРУГОГО скануючого блока аг - си = Д-і, аз - аг = Дг, 04 - аз = Дз а'г - а'і = Д'і а'з - а'г = Д'г, (Л - а'з = Д'з а'2 - а"і = Д11, а"з - а1^ = Д'2, а1^ - а"з = д"з р2 - Рі = Ді, Рз - Р2 = Д2, р4 - Рз = Дз рИ2 - р"і = д"і, р" Далі визначаємо прискорення лінії візування ітд Д2-Ді, Дз-Дг Д ' 2 - Д ' і , Д'з-Д'г для усіх п випромінюючих ДІОДІВ на перший ВД на другий ВД на третій ВД - р"з = Д' Враховуючи раніше сказане, прискорення зміни положення лінії візування залежить тільки від тремора голови льотчика (оператора) За даними прискорення визначаємо синусоїду 56413 тремора, и період та амплітуду Визначаємо моіндивідуума, то результат сигналу, представлений менти зміни знака прискорення і за цими сигналана Фіг 3, Є сумою корисного руху голови і тремора ми із значень поточних пеленгів віднімаємо синуВраховуючи, що спостереження за ціллю на соїду тремора У результаті отримуємо поточне останньому відрізку стеження відбувається з позначення пеленгів без похибки тремора стійною швидкістю, то прискорення корисного сигналу дорівнює майже нулю При розробці пристрою, що заявляється, вирішувалась задача компенсації похибки тремора Розглянемо шлях, який проходить ВД 1 при при визначенні положення лінії візування за допостеженні за ціллю від точки А до точки С (Фіг 1) могою нашоломної системи цілевказівки При цьому один з пеленгів на цей ВД 1, наприклад, а' змінюється від а'і до а' п Для вирішення поставленої задачі у відомий пристрій прицілювання нашоломною системою Від ТОЧКИ А ДО ТОЧКИ В при ЗМІНІ ШВИДКОСТІ цілевказівки, який складається з нашоломного (тобто аг - си = - Д-і) і т д усі значення а' до а п мавузла з випромінюючими діодами, розташованого ють „- Д", а усі точки від В до С мають „+ Д" При на захисному шоломі, скануючих блоків, блока цьому прискорення має негативну величину на визначення кодів пеленгів і пристрою визначення ДІЛЯНЦІ А К і NC, а на ДІЛЯНЦІ KB І BN - позитивну лінії візування, введено лічильник періодів скануЯкщо ми знаємо величину і знак прискорення, то вання і m пристроїв визначення і обліку тремора інвертуємо величину значень прискорення і підсуголови оператора, кожний з яких з'єднано з ВІДПОВІДНИМ виходом блока визначення кодів пеленгів мовуємо и з реально отриманим сигналом стеження за ціллю, чи таким чином величину корисного сигналу без тремора з'єднано з ВІДПОВІДНИМИ виходами лічильника пе Напівперюд тремора, який збігається у напрямку з напрямком корисного сигналу, дає позитивну швидкість, а той, який спрямовано у протилежний бік - негативну швидкість Від точки А до точки В швидкість негативна, а від точки В до точки С позитивна через перші схеми керування "и", другі входи яких ріодів сканування, які є і другими входами других схем управління "и", а ВИХОДИ ЗІ входами регістрів первинних пеленгів, виходи яких з'єднано з першою схемою віднімання, з'єднаною виходами через другі схеми управління "и" з регістрами приросту, виходи яких з'єднано зі входами другої схеми віднімання, вихід якої з'єднано зі входом пікдетектора і пристрою, що запам'ятовує, а вихід пристрою, що запам'ятовує з'єднано з одним із входів сума гора, другий вхід якого з'єднано з ВІДПОВІДНИМ виходом блока визначення кодів пелен гів, третій - з виходом лічильника дільника, входом якого є вихід пік-детектора, а вихід суматора з'єднано з одним із входів пристрою визначення лінії візування Таким чином, задача, що була поставлена перед авторами при розробці пристрою, який заявляється, досягається за рахунок введення у відому систему цілевказівки пристрою визначення та обліку тремора голови льотчика (оператора), лічильника періодів сканування, які дозволяють отримати інформацію про величину періоду і амплітуду тремора голови льотчика (оператора) за даними про просторове положення кожного з випромінюючих ДІОДІВ від усіх скануючих блоків Суть запропонованого винаходу пояснюється кресленнями, де представлені на Фіг 1 - принцип роботи нашоломної системи цілевказівки, Фіг 2 - блок-схема запропонованого пристрою, Фіг 3 - діаграма роботи запропонованого пристрою Розглянемо спосіб прицілювання нашоломною системою цілевказівки Скануючі блоки формують плоскі вер шкальні ВІЯЛОВІ промені, що сканують простір, в якому зна ходиться нашоломний вузол з випромінюючими діодами Коли промінь перетинає будь-який ВД, виробляється сигнал, що формує первинний пеленг на даний ВД Якщо мати на увазі, що скануючих блоків два, а випромінюючих ДІОДІВ три, то отримаємо шість пеленгів на ВД, а саме а, а', а", Р, Р', р" Враховуючи, що тремор мас синусоїдну форму з постійною амплітудою і періодом для кожного До складу запропонованого пристрою (Фіг 2) входять нашоломний вузол 1 з випромінюючими діодами 2, розташованими на захисному шоломі З, пристрій визначення лінії візування 6 , блок визначення кодів пеленгів 7, пристрої визначення і обліку тремора голови оператора 8 для кожного з первинних пеленгів (тобто m каналів) Пристрій визначення і обліку тремора голови оператора 8 складається з лічильника дільника 9, пік-детектора 10, регістрів первинних пеленгів 11 зі схемами управління 12, схеми віднімання 1-13, регістрів приросту 14 зі схемами управління 15, схеми віднімання 2-16 пристрою 17, що запам'ятовує, та суматора 18 Крім того, до пристрою входять лічильник періодів сканування 19 Усі елементи даного пристрою можуть бути виконані на основі стандартизованої елементної бази Пристрій працює таким чином Простір, в якому знаходиться нашоломний вузол 1 з випромінюючими діодами 2, розташований на захисному шоломі 3 льотчика (оператора), сканується віяловими плоскими оптичними променями, які формуються скануючими блоками 4, 5 (оптична локація) Усі зміщення нашоломного вузла 1 у вертикальній площині, при даному способі визначення його положення , не враховуються, а горизонтальні - визначаються шляхом обчислювання первинних пеленгів у блоці визначення первинних кодів пеленгів 7 Тобто, значення тремора, які присутні в значеннях первинних кодів пеленгів а, а', а", р, р', р", якщо випромінюючих ДІОДІВ 2 три Розглянемо роботу пристрою для одітого з випромінюючих ДІОДІВ 2 і одного скануючого блока 4 Обчислені значення а з блока визначення кодів пеленгів 7 надходять на пристрій визначення і обліку тремора голови льотчика (оператора) 8, а саме на перші схеми управління 12, які складаються з двох схем "и", на другі входи яких надхо 56413 8 сується у пристрій 17 , що запам'ятовує значення дять сигнали від лічильника періодів сканування синусоїди яка відповідає тремору голови льотчика 19 Лічильники періодів сканування 19 рахують (оператора), а враховуючи, що швидкість зміни а в імпульси початку сканування, які формуються в процесі прицілювання на кінцевій ДІЛЯНЦІ постійна, СКАБ 4, 5, тобто в кожному циклі сканування знато прискорення утворюється тільки за рахунок тречення записується через першу схему "и" першої мора Отримана інформація з пристрою 17, що схеми управління 12 до першого регістру первинзапам'ятовує, надходить з протилежним знаком на них пеленгів 11, а у другому циклі сканування інсуматор 18, де і підсумовується зі значеннями а, формація про аг записується через другу схему "и" які надходять з блока визначення кодів пеленгів 7 першої схеми управління 12 до другого регістра Знак складання або віднімання на суматор 18 надпервинних пеленгів 11 ходить з лічильника дільника 9, який рахує імпульЗначення аз записується до першою регістра си з пік-детектора 10, в якому визначається мопервинних пеленгів 11, а 04 - до другого і т д мент зміни знака приросту з другою схемою Записані в регістрах первинних пеленгів знавіднімання 16 (див Фіг 3) 3 виходу суматора 18 чення сн і аг надходять на першу схему віднімання інформація надходить на пристрій визначення лінії 13, де і визначають приріст а в кожному циклі (тобвізування 6 то швидкість - перше похідне) Через другі схеми управління 15 за тими ж коУ порівнянні з базовим об'єктом, за який узято мандами з лічильника періодів сканування 19 знавиріб "Сура", де тремор голови льотчика (операчення приростів Ді і U2 записуються у ВІДПОВІДНІ тора) наявний у похибці прицілювання, а значення регістри приросту 14 У другій схемі віднімання 16 похибки тремора дорівнює 1°30', точність прицівизначають поточні різниці Дг - Ді, Дз - Дг, Д4 - Дз і лювання збільшена до 5', що дозволяє використот д , тобто визначають другу похідну прирощення вувати нашоломну систему цілевказівки як приціл а, тобто прискорення Отримана інформація запи СКАБ к ПРИ-ВІДСУТНОСТІ КОРИСНОГО СИГНАЛУ шия 56413 Фіг 2 10 11 дйьиик 12 56413 + о °/з З Підписано до друку 05 06 2003 р Тираж 39 прим ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)236-47-24 +
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for aiming with helmet system of targeting and appliance for its implementation
Автори англійськоюCherniak Serhii Ivanovych
Назва патенту російськоюСпособ прицеливания нашлемной системой целеуказания и устройство для его реализации
Автори російськоюЧерняк Сергей Иванович
МПК / Мітки
МПК: F41G 3/22
Мітки: прицілювання, здійснення, нашоломною, спосіб, системою, пристрій, цілевказування
Код посилання
<a href="https://ua.patents.su/6-56413-sposib-pricilyuvannya-nasholomnoyu-sistemoyu-cilevkazuvannya-i-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб прицілювання нашоломною системою цілевказування і пристрій для його здійснення</a>
Спосіб прицілювання нашоломною системою цілевказівки і пристрій для його реалізації
Номер патенту: 56413
Опубліковано: 15.05.2003
Автори: Кадочніков Сергій Михайлович, Черняк Сергій Іванович, Ліпунова Валентина Григорівна
МПК: F41G 3/22
Мітки: прицілювання, пристрій, системою, нашоломною, спосіб, реалізації, цілевказівки
Формула / Реферат:
1. Спосіб прицілювання нашоломною системою цілевказування, в основу якого покладене сканування простору знаходження нашоломного вузла з n випромінюючими діодами плоскими оптичними віяловими променями, визначення первинних пеленгів на кожний з n випромінюючих діодів та положення n випромінюючих діодів у просторовій площині, яка проходить через реперні точки нашоломного вузла, в яких розташовані випромінюючі діоди, який відрізняється тим, що за...
Спосіб визначення кутів візування нашоломною системою візування
Номер патенту: 30200
Опубліковано: 15.05.2003
Автори: Черняк Сергій Іванович, Плита Олександр Андрійович, Беляєва Галина Григорівна
МПК: G02B 23/00
Мітки: нашоломною, спосіб, визначення, візування, кутів, системою
Формула / Реферат:
Спосіб визначення кутів візування нашоломною системою візування, який полягає у визначенні кутових координат орієнтації в просторі осі візира, встановленого на рухомій основі, наприклад на шоломі оператора, при суміщенні перехрестя візира з ціллю, який відрізняється тим, що вимірюють величини швидкості кутового повороту відносно трьох взаємно перпендикулярних осей рухомої основи, а кути вертикального
Спосіб визначення орієнтації осі візира та нашоломна система цілевказування для його реалізації
Номер патенту: 47969
Опубліковано: 15.09.2003
Автори: Ліпунова Валентина Григорівна, Черняк Сергій Іванович, Кадочніков Сергій Михайлович
МПК: F41G 3/22
Мітки: візира, осі, система, спосіб, нашоломна, цілевказування, визначення, реалізації, орієнтації
Формула / Реферат:
1. Спосіб визначення орієнтації осі візира, суть якого полягає в скануванні простору, в якому знаходиться нашоломний вузол із випромінюючими діодами, плоскими віяловими оптичними променями, визначенні первинних пеленгів на кожний випромінюючий діод на момент проходження через випромінюючі діоди віялових оптичних променів, визначенні положення нашоломного вузла у просторі та визначенні орієнтації осі візира, який відрізняється тим, що...
Спосіб визначення кутів візування нашоломною системою візування
Номер патенту: 30187
Опубліковано: 15.11.2000
Автори: Плита Олександр Андрійович, Черняк Сергій Іванович, Беляєва Галина Григорівна
МПК: G02B 23/00
Мітки: визначення, візування, спосіб, кутів, нашоломною, системою
Формула / Реферат:
Спосіб визначення кутів візування нашоломною системою візування, який полягає в визначенні кутових координат орієнтації в просторі вісі візиру, установленого на рухомій основі, та суміщенні перехрестя візиру з ціллю, який відрізняється тим, що вимірюють величину швидкості кутового розвороту рухомої основи відносно вертикальної вісі базової системи координат, суміщують контрольні та стабілізовані мітки в полі зору візиру, а координати...
Спосіб визначення кутів візування нашоломною системою візування
Номер патенту: 30191
Опубліковано: 15.11.2000
Автори: Черняк Сергій Іванович, Плита Олександр Андрійович, Беляєва Галина Григорівна, Бузанов Віктор Іванович
МПК: G02B 23/00
Мітки: системою, спосіб, візування, кутів, визначення, нашоломною
Формула / Реферат:
Спосіб визначення кутів візування нашоломною системою візування, який полягає у визначенні кутових координат орієнтації в просторі вісі візиру, встановленного на рухомій основі, при суміщенні перехрестя візиру з ціллю, який відрізняється тим, що додатково вимірюють параметри кутового розвороту відносно двох взаємноперпендикулярних вісей рухомої основи, суміщують контрольні та стабілізовані мітки у полі зору візиру, а кути азимутального jу та...