Гнучка транспортна система
Номер патенту: 56463
Опубліковано: 15.05.2003
Автори: Хащін Юрій Олександрович, Швехер Максим Романович, Худаймуратов Мурат Абдулайович, Копп Вадим Якович

Формула / Реферат
1. Гнучка транспортна система, що містить подовжні і поперечні конвеєри, з розташованим між ними проміжним конвеєром, виконані у вигляді самостійних модулів, яка відрізняється тим, що подовжні і поперечні модулі виконані двоярусними з єдиним для кожного модуля автономним приводом стрічки, замкнений контур якої утворює форму рівнобокої трапеції, менша основа якої розташована напрямком униз, а проміжний модуль виконаний двоярусним підіймально-поворотним, забезпеченим також єдиним приводом стрічок і гідроприводом підйому (опускання) його на відповідний ярус згаданих модулів, при цьому шток гідроприводу кінематично взаємозв’язаний через штифти з каркасом проміжного модуля через втулку, розміщену на штоці з можливістю обертання навколо нього, і маточину, яка жорстко закріплена на тому ж каркасі і оснащена нерухомим, відносно маточин, барабанним кулачком, в пазу якого розташований палець кронштейна, що встановлений з можливістю переміщення його по напрямній, причому втулка виконана з розташованими діаметрально протилежно подовжніми пазами у верхній частині і шлицями на її зовнішній поверхні в нижній частині, а паз барабанного кулачка виконаний з профілем, що забезпечує можливість опускання і підйому проміжного модуля відносно штока гідроприводу при повороті барабанного кулачка на кожні 90°.
2. Гнучка транспортна система за п. 1, яка відрізняється тим, що довжина кожного паза втулки виконана рівною не менше за величину ходу штока, а ширина кільцевої проточки останнього дорівнює максимальній величині ходу барабанного кулачка.
3. Гнучка транспортна система за п. 1 і 2, яка відрізняється тим, що привід повороту проміжного модуля виконаний від мальтійського механізму, мальтійський хрест якого встановлений на шлицьовій частині втулки.
Текст
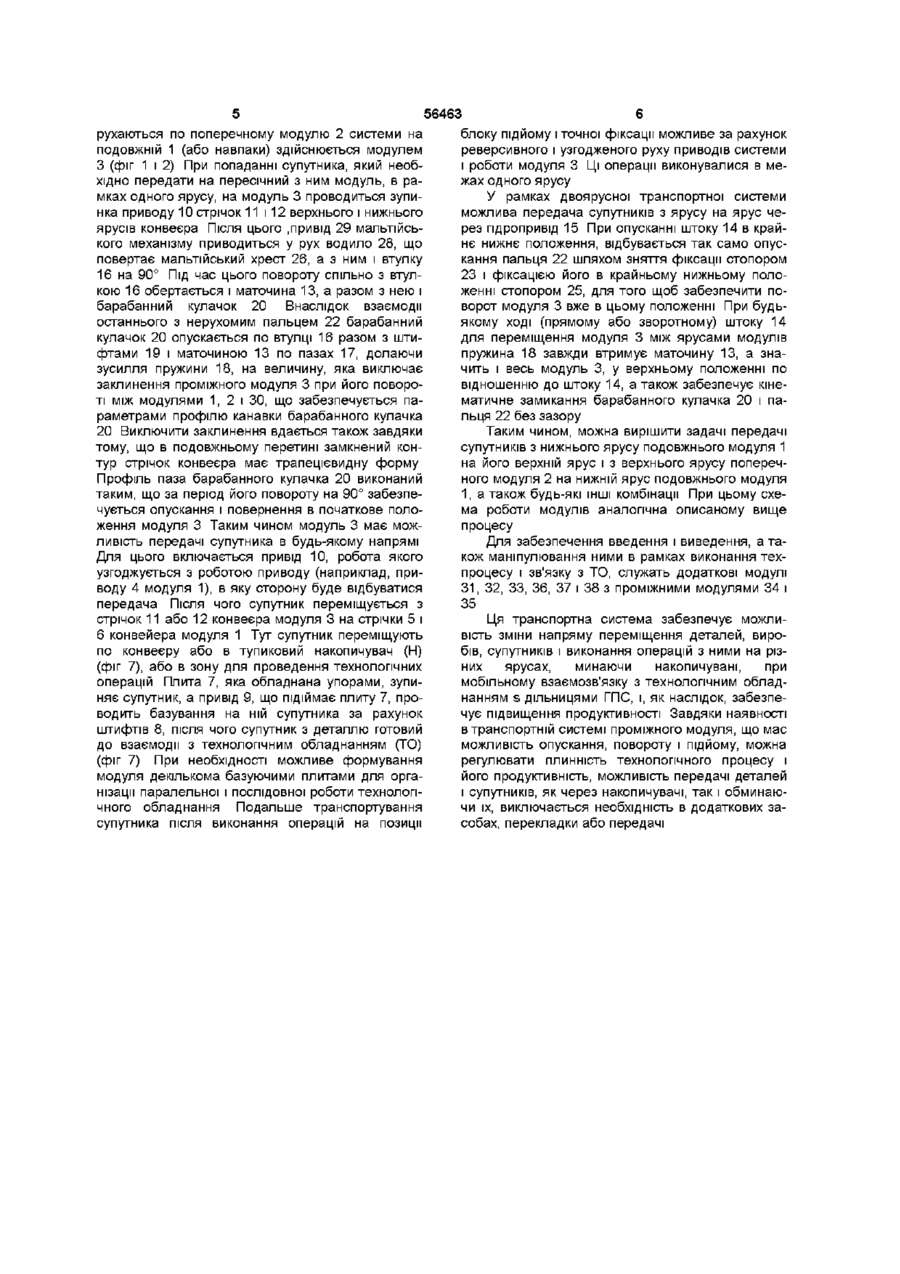
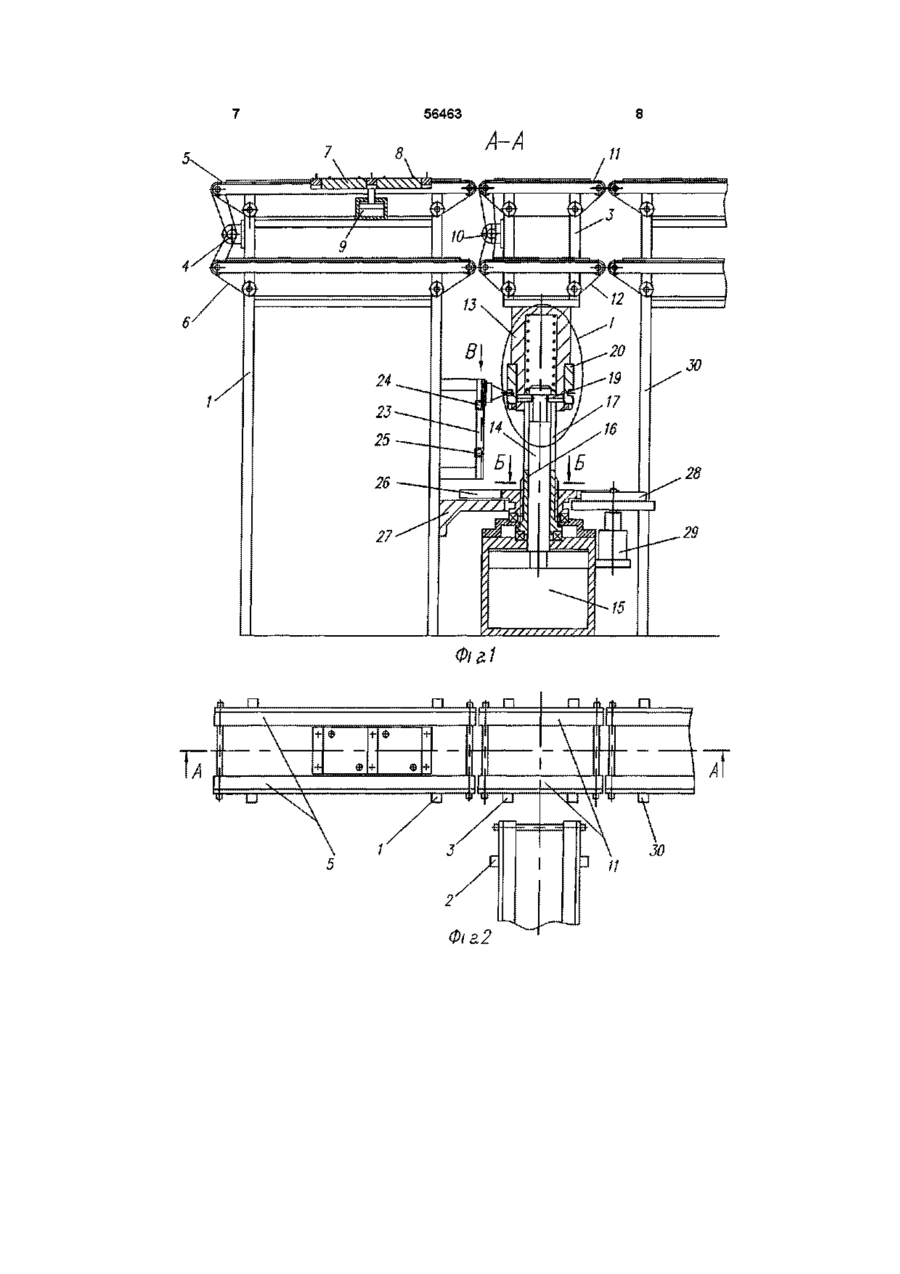
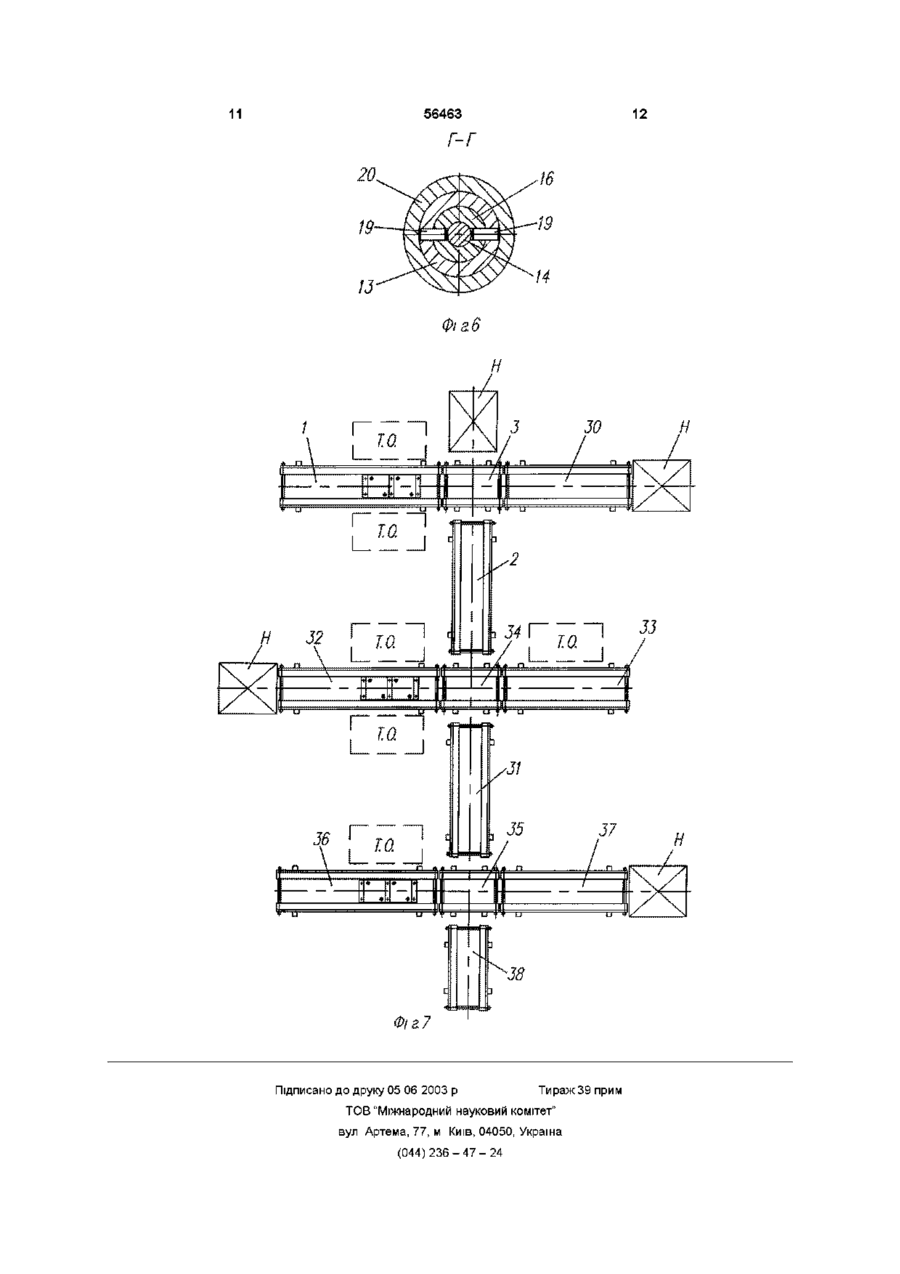
1 Гнучка транспортна система, що містить подовжні і поперечні конвеєри, з розташованим між ними проміжним конвеєром, виконані у вигляді самостійних модулів, яка відрізняється тим, що подовжні і поперечні модулі виконані двоярусними з єдиним для кожного модуля автономним приводом стрічки, замкнений контур якої утворює форму рівнобокої трапеції, менша основа якої розташована напрямком униз, а проміжний модуль виконаний двоярусним підіймально-поворотним, забезпеченим також єдиним приводом стрічок і пдроприводом підйому (опускання) його на ВІДПОВІДНИЙ ярус згаданих модулів, при цьому шток пдроприводу кінематично взаємозв'язаний через штифти з каркасом проміжного модуля через втулку, розміщену на штоці з можливістю обертання навколо нього, і маточину, яка жорстко закріплена на тому ж каркасі і оснащена нерухомим, відносно маточин, барабанним кулачком, в пазу якого розташований палець кронштейна, що встановлений з можливістю переміщення його по напрямній, причому втулка виконана з розташованими діаметрально протилежно подовжніми пазами у верхній частині і шлицями на її ЗОВНІШНІЙ поверхні в нижній частині, а паз барабанного кулачка виконаний з профілем, що забезпечує можливість опускання і підйому проміжного модуля відносно штока пдроприводу при повороті барабанного кулачка на кожні 90° 2 Гнучка транспортна система за п 1, яка відрізняється тим, що довжина кожного паза втулки виконана рівною не менше за величину ходу штока, а ширина кільцевої проточки останнього дорівнює максимальній величині ходу барабанного кулачка 3 Гнучка транспортна система за п 1 і 2, яка відрізняється тим, що привід повороту проміжного модуля виконаний від мальтійського механізму, мальтійський хрест якого встановлений на шлицьовій частині втулки ГО (О ^и Запропонована конструкція, відноситься до транспортного обладнання, що використовується в гнучких переналагоджувальних системах (ГПС) в машинобудуванні і приладобудуванні для автоматизації операцій подачі, укладання, складання, контролю і інш Відомий пристрій для передачі виробів з подаючого конвеєра на приймальний (А с СССР №1142382, кл 65 G 47/52, БИ №8, 1985), який містить подовжні і поперечні конвеєри з проміжною дільницею у вигляді підіймально-опускної рами Недоліками цього пристрою є складність конструкції в зв'язку з введенням спеціальних обвідних і підтримуючих зірочок ланцюгових передач, а також неможливість просторової переорієнтації виробів в процесі транспортування і передачі виробів Відомий також транспортний пристрій, що ви користовується в ГПС (С Ф Бурдаков, В А Дьяченко, А Н Тимофеев Проектирование манипуляторов и роботизированных комплексов Учеб пособие-М Высш ш к - 1 9 8 6 - С 226-229, рис 6 17 и 6 18), який містить подовжні і поперечні стрічкові транспортери в поєднанні з накопичувачами деталей і можливістю розміщення супутників на транспортерах Недоліками такого пристрою є обмежені можливості переорієнтації деталей або виробів на транспортерах, так як деталь пов'язана зі супутником жорстко і повороту зазнає не деталь, а супутник Крім того, передача деталей з транспортера на транспортер здійснюється тільки зі супутником Для виконання цих операцій використовується вельми складний по конструкції модуль Найбільш близьким по суті задачі, що вирішується є транспортна система для накопичування супутників (А с СССР № 1715688, кл 65 G 47/52, (О Ю 56463 портної системи (перетин А-А фіг 2), на фіг 2 вигляд зверху фіг 1, на фіг 3 - вигляд І фіг 1, на фіг 4 - перетин Б-Б фіг 1, на фіг 5 - вигляд В фіг 1, на фіг 6 - перетин Г-Г фіг 3, на фіг 7 - показаний варіант компонування двоярусної гнучкої транспортної системи Транспортна система, що пропонується, містить (фіг 1 і 2) подовжній модуль 1, поперечний модуль 2 і проміжний модуль 3 При цьому подовжній модуль 1 виконаний двоярусним з приводом 4, який є загальним для кожної пари стрічок 5 і 6 ВІДПОВІДНО верхнього і нижнього ярусів Між стрічками 5 верхнього ярусу встановлений блок підйому і точної фіксації супутника, що містить плиту 7, базуючі штифти 8 і привід 9 Поперечний модуль 2 конструктивно виконаний аналогічним подовжньому модулю 1, але без блоку підйому і фіксації супутників Проміжний модуль 3 виконаний двоярусним з єдиним приводом 10 кожної пари стрічок 11 і 12, ВІДПОВІДНО верхнього і нижнього ярусів Конвеєри кожного з модулів, в подовжньому перетині мають В основу винаходу поставлено задачу розшивигляд рівнобокої трапеції, менша основа якої розрення функціональних можливостей транспортної ташована напрямком униз системи, забезпечення мобільного взаємозв'язку технологічного обладнання, дільниць зберігання і Проміжний модуль 3 виконаний з можливістю комплектації виробів, а також роботизованих комповороту, опускання і підйому в початкове полоплексів ГПС виробничих підрозділів ження, для чого він оснащений жорстко закріпленою на його каркасі (фіг 1 і 3) маточиною 13, кінеПоставлена задача досягається тим, що гнучматично пов'язаною зі штоком 14 гідроприводу 15 ка транспортна система містить подовжні і попе(фіг 1) опускання і підйому проміжного модуля З речні конвеєри з розташованим між ними проміжПри цьому шток 14 виконаний з кільцевою проточним конвеєром, які виконані у вигляді самостійних кою у верхній його частині, ширина якої рівна вемодулів При цьому модулі виконані двоярусними личині ходу барабанного кулачка 20 Маточина 13 конвеєрами з автономним приводом стрічок У встановлена з можливістю подовжнього переміподовжньому перетині замкнений контур стрічки щення по втулці 16, яка виконана s діаметрально утворює форму рівнобокої трапеції, менша основа протилежними подовжніми пазами 17 у верхній якої розташована напрямком униз Проміжний мочастині, шлицями на ЗОВНІШНІЙ її поверхні нижньої дуль виконаний підіймально-поворотним, забезпечастини і розташована на штоці 14 гідроприводу ченим індивідуальним приводом стрічок і пдро15 з можливістю обертання навколо нього Довжиприводом підйому (опускання) його на ВІДПОВІДНИЙ на подовжніх пазів 17 втулки 16 виконана рівною ярус подовжніх або поперечних модулів При цьопо величині не менше за величину ходу штока 14 му шток гідроприводу кінематичне взаємопов'язаМіж маточиною 13 і втулкою 16 розташована пруний за допомогою штифтів з каркасом проміжного жина 18, при цьому перші (маточина і втулка) кімодуля через втулку розміщену на штоці з можлинематично взаємопов'язані через штифти 19, які вістю обертання навколо нього, і маточину, яка встановлені одночасно в отворах маточини 13, жорстко закріплена на тому ж каркасі і оснащена пазах 17 втулки 16 і в кільцевій проточці верхньої нерухомим, відносно маточини, барабанним кулачастини штоку 14 (фіг 1, 3 і 6) У свою чергу на чком, в пазу якого розташований палець кронматочині 13 жорстко закріплений барабанний куштейна Останній встановлений з можливістю пелачок 20 за допомогою гайки 21 і кінематично взареміщення його по напрямні Втулка виконана з ємопов'язаний з пальцем 22, який встановлений діаметрально протилежними подовжніми пазами у рухомо на СТІЙЦІ 23 (фіг 1, 3 і 5) з можливістю фікверхній частині і шлицями на її ЗОВНІШНІЙ поверхні сації стопорами 24 і 25 (фіг 1) в крайніх положенв нижній частині Паз барабанного кулачка виконях штока 14 На шпицевій частині втулки 16 встананий з профілем, що забезпечує можливість опуновлений мальтійський хрест 26 (фіг 1 і 6), що скання і підйому проміжного модуля відносно штофіксується від осьового зміщення кронштейном 27 ку гідроприводу при повороті барабанного кулачка (фіг 1) і взаємодіючий з водилом 28 приводу 29 на кожні 90° Довжина кожного паза втулки вико(фіг 1 і 4) На компонувальній схемі (фіг 7) модулі нана рівною за величиною не менше за величину 31, 32, 33, 36, 37 і 38 виконані аналогічно модулям ходу штока, а ширина кільцевої проточки остан1, 2 і ЗО, а модулі 34 і 35 аналогічно модулю З нього рівна максимальній величині ходу барабанного кулачка Привід повороту проміжного модуля Працює транспортна система таким чином виконаний від мальтійського механізму, мальтійсьдеталь (виріб) зі супутником або без нього на, І кий хрест якого встановлений на шпицевій частині ходить на стрічках 5 з подовжнього модуля 1 на втулки, розташованій на штоці гідроприводу проміжний модуль 3, звідки може бути передана транспортною системою модуля 3 стрічками 11 на Запропонована конструкція гнучкої транспортнаступний так само подовжній модуль ЗО (фіг 1 і ної системи представлена на кресленнях, де на 2) Передача деталей, виробів або супутників, які фіг 1 показаний в перетині вигляд спереду трансБИ №8, 1992), яка містить привідні подовжні і поперечні конвеєри, виконані у вигляді транспортних модулів і пов'язані один з одним через ланцюгову передачу з розташованою між конвеєрами дільницею підйому (опускання) частини конвеєра, що функціонально виконує роль проміжного модуля При цьому на кожному з конвеєрів передбачена можливість точної фіксації супутників Недоліками такої транспортної системи є, передусім те, що поперечні конвеєри і проміжна дільниця (модуль) мають одну і ту ж стрічку, один привід і зупинка цього модуля приводить до порушення (припинення) роботи всієї транспортної системи Крім того, проміжна дільниця, як модуль, має обмежені можливості маніпулювання деталями і не забезпечує переорієнтування деталей або виробів в просторі, причому обмежена і автономність його функціонування Обмежені можливості роботи системи з різними деталями по розмірах і формі, а також в тому, що система органічно пов'язана з накопичувачами супутників і тупиковими накопичувачами рухаються по поперечному модулю 2 системи на подовжній 1 (або навпаки) здійснюється модулем З (фіг 1 і 2) При попаданні супутника, який необхідно передати на пересічний з ним модуль, в рамках одного ярусу, на модуль 3 проводиться зупинка приводу 10 стрічок 11 112 верхнього і нижнього ярусів конвеєра Після цього .привід 29 мальтійського механізму приводиться у рух водило 28, що повертає мальтійський хрест 26, а з ним і втулку 16 на 90° Під час цього повороту спільно з втулкою 16 обертається і маточина 13, а разом з нею і барабанний кулачок 20 Внаслідок взаємодії останнього з нерухомим пальцем 22 барабанний кулачок 20 опускається по втулці 16 разом з штифтами 19 і маточиною 13 по пазах 17, долаючи зусилля пружини 18, на величину, яка виключає заклинення проміжного модуля 3 при його повороті між модулями 1, 2 і ЗО, що забезпечується параметрами профілю канавки барабанного кулачка 20 Виключити заклинення вдається також завдяки тому, що в подовжньому перетині замкнений контур стрічок конвеєра має трапецієвидну форму Профіль паза барабанного кулачка 20 виконаний таким, що за період його повороту на 90° забезпечується опускання і повернення в початкове положення модуля 3 Таким чином модуль 3 має можливість передачі супутника в будь-якому напрямі Для цього включається привід 10, робота якого узгоджується з роботою приводу (наприклад, приводу 4 модуля 1), в яку сторону буде відбуватися передача Після чого супутник переміщується з стрічок 11 або 12 конвеєра модуля 3 на стрічки 5 і 6 конвейєра модуля 1 Тут супутник переміщують по конвеєру або в тупиковий накопичувач (Н) (фіг 7), або в зону для проведення технологічних операцій Плита 7, яка обладнана упорами, зупиняє супутник, а привід 9, що підіймає плиту 7, проводить базування на ній супутника за рахунок штифтів 8, після чого супутник з деталлю готовий до взаємодії з технологічним обладнанням (ТО) (фіг 7) При необхідності можливе формування модуля декількома базуючими плитами для організації паралельної і послідовної роботи технологічного обладнання Подальше транспортування супутника після виконання операцій на позиції 56463 блоку підйому і точної фіксації можливе за рахунок реверсивного і узгодженого руху приводів системи і роботи модуля 3 Ці операції виконувалися в межах одного ярусу У рамках двоярусної транспортної системи можлива передача супутників з ярусу на ярус через пдропривід 15 При опусканні штоку 14 в крайнє нижнє положення, відбувається так само опускання пальця 22 шляхом зняття фіксації стопором 23 і фіксацією його в крайньому нижньому положенні стопором 25, для того щоб забезпечити поворот модуля 3 вже в цьому положенні При будьякому ході (прямому або зворотному) штоку 14 для переміщення модуля 3 між ярусами модулів пружина 18 завжди втримує маточину 13, а значить і весь модуль 3, у верхньому положенні по відношенню до штоку 14, а також забезпечує кінематичне замикання барабанного кулачка 20 і пальця 22 без зазору Таким чином, можна вирішити задачі передачі супутників з нижнього ярусу подовжнього модуля 1 на його верхній ярус і з верхнього ярусу поперечного модуля 2 на нижній ярус подовжнього модуля 1, а також будь-які ІНШІ комбінації При цьому схема роботи модулів аналогічна описаному вище процесу Для забезпечення введення і виведення, а також маніпулювання ними в рамках виконання техпроцесу і зв'язку з ТО, служать додаткові модулі 31, 32, 33, 36, 37 і 38 з проміжними модулями 34 і 35 Ця транспортна система забезпечує можливість зміни напряму переміщення деталей, виробів, супутників і виконання операцій з ними на різних ярусах, минаючи накопичувані, при мобільному взаємозв'язку з технологічним обладнанням s дільницями ГПС, і, як наслідок, забезпечує підвищення продуктивності Завдяки наявності в транспортній системі проміжного модуля, що мас можливість опускання, повороту і підйому, можна регулювати плинність технологічного процесу і його продуктивність, можливість передачі деталей і супутників, як через накопичувачі, так і обминаючи їх, виключається необхідність в додаткових засобах, перекладки або передачі 56463 м о. П dL.fti А П П ф__ф 1 ГІГ тг // Фі&2 зо 56463 10 ФіаЗ Б-Б 26 23 11 56463 12 r-r Фіаб Фіг-7 Підписано до друку 05 06 2003 р Тираж 39 прим ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)236-47-24
ДивитисяДодаткова інформація
Назва патенту англійськоюFlexible system of transportation
Автори англійськоюKopp Vadym Yakovych
Назва патенту російськоюГибкая транспортная система
Автори російськоюКопп Вадим Яковлевич
МПК / Мітки
МПК: B65G 57/02, B65G 47/52
Мітки: система, гнучка, транспортна
Код посилання
<a href="https://ua.patents.su/6-56463-gnuchka-transportna-sistema.html" target="_blank" rel="follow" title="База патентів України">Гнучка транспортна система</a>
Транспортна система
Номер патенту: 29697
Опубліковано: 15.11.2000
Автори: Кожевніков Валентин Павлович, Кожевніков Максим Валентинович
МПК: B60F 1/00
Мітки: система, транспортна
Формула / Реферат:
1. Транспортна система, що складається з колії та поїздів, зібраних з локомотивів і вагонів, а також засобів керування рухом поїздів по колії, яка відрізняється тим, що колеса до локомотивів та вагонів виготовляються з ободами з пружкого тугого матеріалу, а колію будують відповідно до форми і розмірів коліс.2. Транспортна система по п.1, яка відрізняється тим, що колеса вагонів при русі поза колією за тягачем мають можливість...
Міжопераційна підвісна транспортна система
Номер патенту: 1462
Опубліковано: 15.10.2002
Автори: Халіп Олег Юрійович, Сібіряков Юрій Григорович
МПК: B65G 63/00
Мітки: система, підвісна, міжопераційна, транспортна
Формула / Реферат:
Міжопераційна підвісна транспортна система, яка містить основний ходовий шлях з двох паралельних віток, розміщений вздовж операційних зон, зональні ходові шляхи, розташовані перпендикулярно основному ходовому шляху, принаймні один перевантажувач, який переміщується по основному ходовому шляху, і принаймні одну вантажонесучу каретку з опорами кочення, при цьому перевантажувач містить принаймні одну напрямну для розміщення вантажонесучої...
Лінійна транспортна система
Номер патенту: 28057
Опубліковано: 16.10.2000
Автор: Юніцкій Анатолій Едуардович
МПК: B61B 13/04, E01B 5/00
Мітки: лінійна, транспортна, система
Текст:
...варительно напряженный продольный элемент в виде по крайней мере одной струны растянут до усилия Ni, определяемого из соотношений 0,5 < ^- < 0,999 ; 1 0 1 0 ; Q где: N2 - усилие разрыва струны при растяжении; Q - вес подвижной единицы. 5. Система по п. 1, отличающаяся тем, что стру на выполнена из отдельных проволок. 6. Система по п. 1, отличающаяся тем, что стру на выполнена из отдельных полос. 7. Система по п. 5 или 6, отличающаяся...
Рейкова шахтна транспортна система вижленкова
Номер патенту: 51704
Опубліковано: 16.12.2002
Автор: Вижленков Олександр Гур'янович
МПК: E21F 17/08, B61B 13/12, E21F 13/04
Мітки: вижленкова, транспортна, рейкова, шахтна, система
Формула / Реферат:
Рейкова шахтна транспортна система, що містить мережу рейок, шахтні локомотиви і потяги, яка відрізняється тим, що має траншейно-секційну гідротрубну мережу з насосним агрегатом високого тиску і кількома подвійними секційними трубними відгалуженнями, секційні автоматичні гідроколонки з додатковими шатунно-крейцкопфними механізмами, послідовно і зустрічно розміщеними внизу траншеї рейкового шляху, навісні ролико-маятникові датчики і виконавчі...
Транспортна система

Номер патенту: 5273
Опубліковано: 28.12.1994
Автори: Коваленко Микола Сергійович, Бухановський Володимир Васильович
МПК: B61B 7/00
Мітки: система, транспортна
Формула / Реферат:
1. Транспортная, система, содержащая рельсовый путь со стрелочным переводом, буксировочные тележки с тормозными устройствами, размещенные между ними транспортные вагонетки, сцепленные между собой и с одной из буксировочных тележек, расположенный вдоль рельсов приводной тягой канат, один конец которого запасован на барабане, установленном на одной буксировочной тележке, отличающаяся тем, что она снабжена для взаимодействия с тяговым канатом...
Попередній патент: Спосіб поліпшення лікування спондильозу
Наступний патент: Спосіб лікування хронічних запальних захворювань шийки матки у жінок фертильного віку
Випадковий патент: Спосіб профілактики слухових порушень внутрішнього вуха у хворих на судинні захворювання головного мозку