Канал вимірювання похилої дальності до літальних апаратів для лівс з додатковими можливостями
Номер патенту: 56911
Опубліковано: 25.01.2011
Автори: Васильєв Дмитро Геннадійович, Злотніков Андрій Львович, Приходько Володимир Мусійович, Сачук Ігор Іванович, Пашков Дмитро Павлович, Дзеверін Ігор Григорович, Можаєв Олександр Олександрович, Приходько Дмитро Петрович, Альошин Геннадій Васильович, Коломійцев Олексій Володимирович
Формула / Реферат
Канал вимірювання похилої дальності до літальних апаратів для ЛІВС з додатковими можливостями, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод, призми для частоти міжмодових биттів Dvм, модифікований блок дефлекторів, перемикач для частот міжмодових биттів Dvм і 2Dvм, передавальну оптику, приймальну оптику, фотодетектори, широкосмуговий підсилювач (ШП), резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, формувач імпульсів, тригер "1"|"0", схему "і", лічильники, фільтр із заданою смугою пропускання, детектор, диференційовну оптику, підсилювач, фільтр, диференційовні ланцюжки, випрямлячі, електронно-цифрову обчислювальну машину та блок відображення вимірювальної інформації про похилу дальність R до літального апарата (ЛА), який відрізняється тим, що після ШП додатково введено модифікований інформаційний блок для інформаційного взаємозв'язку з ЛА та, в разі необхідності, формування і обробки його зображення.
Текст
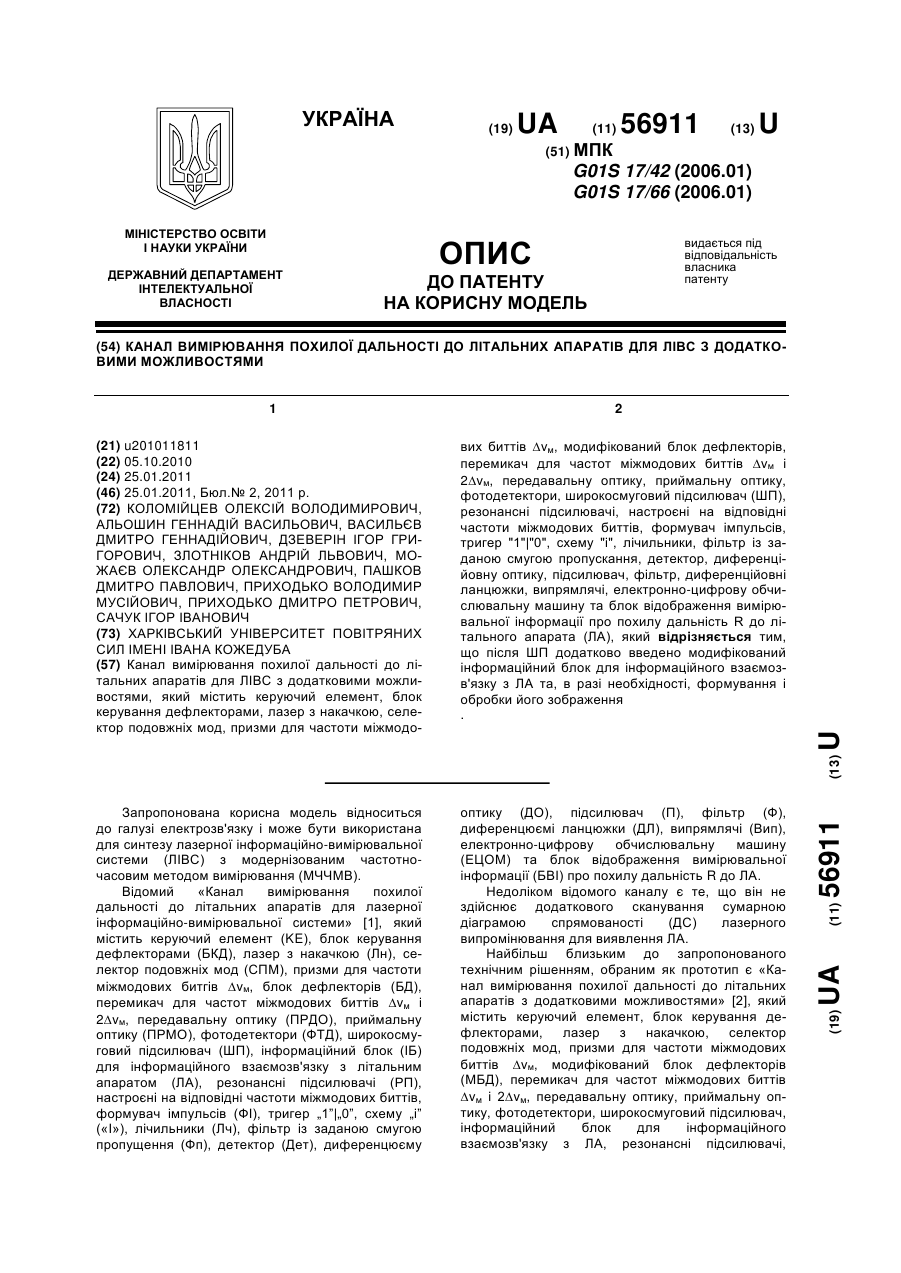
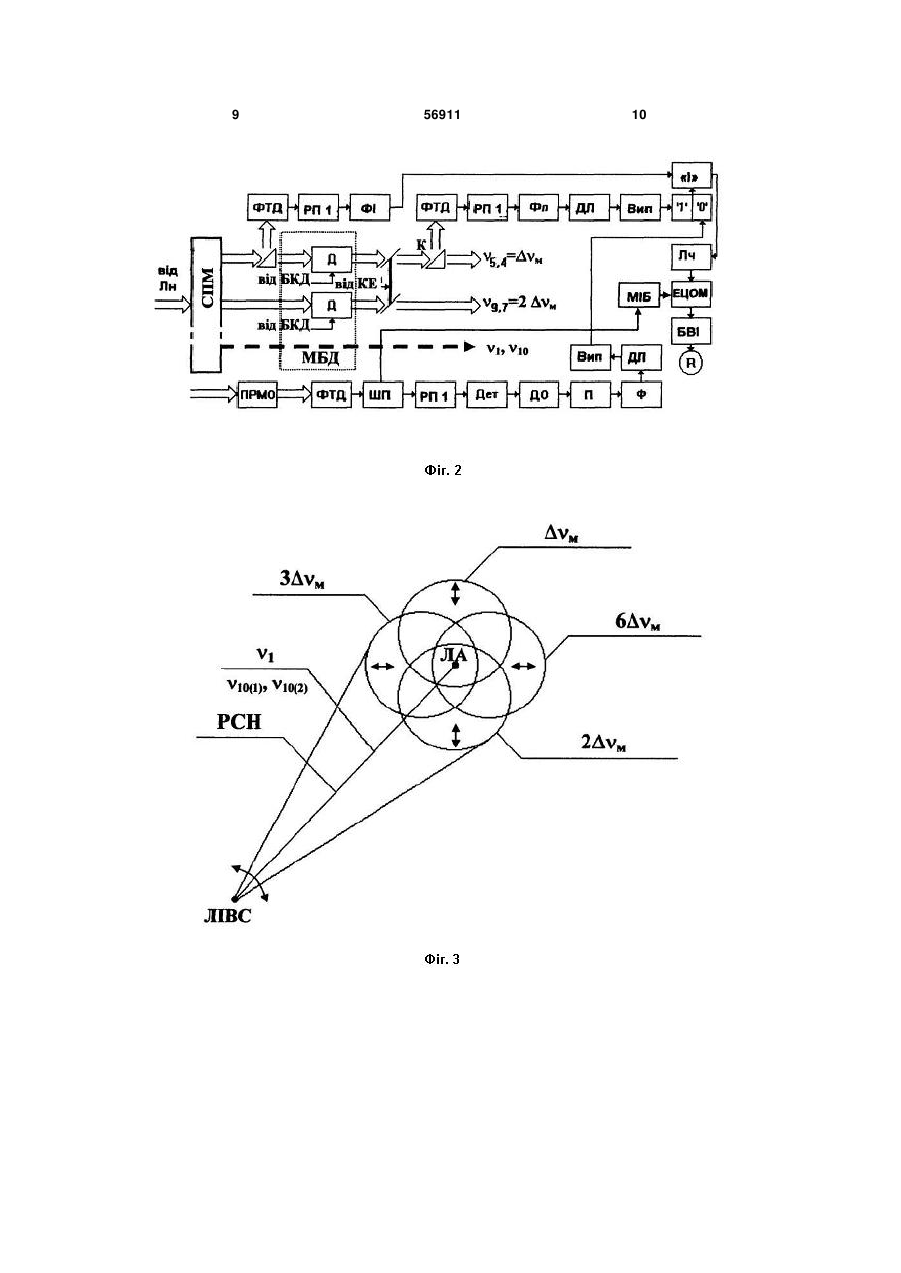
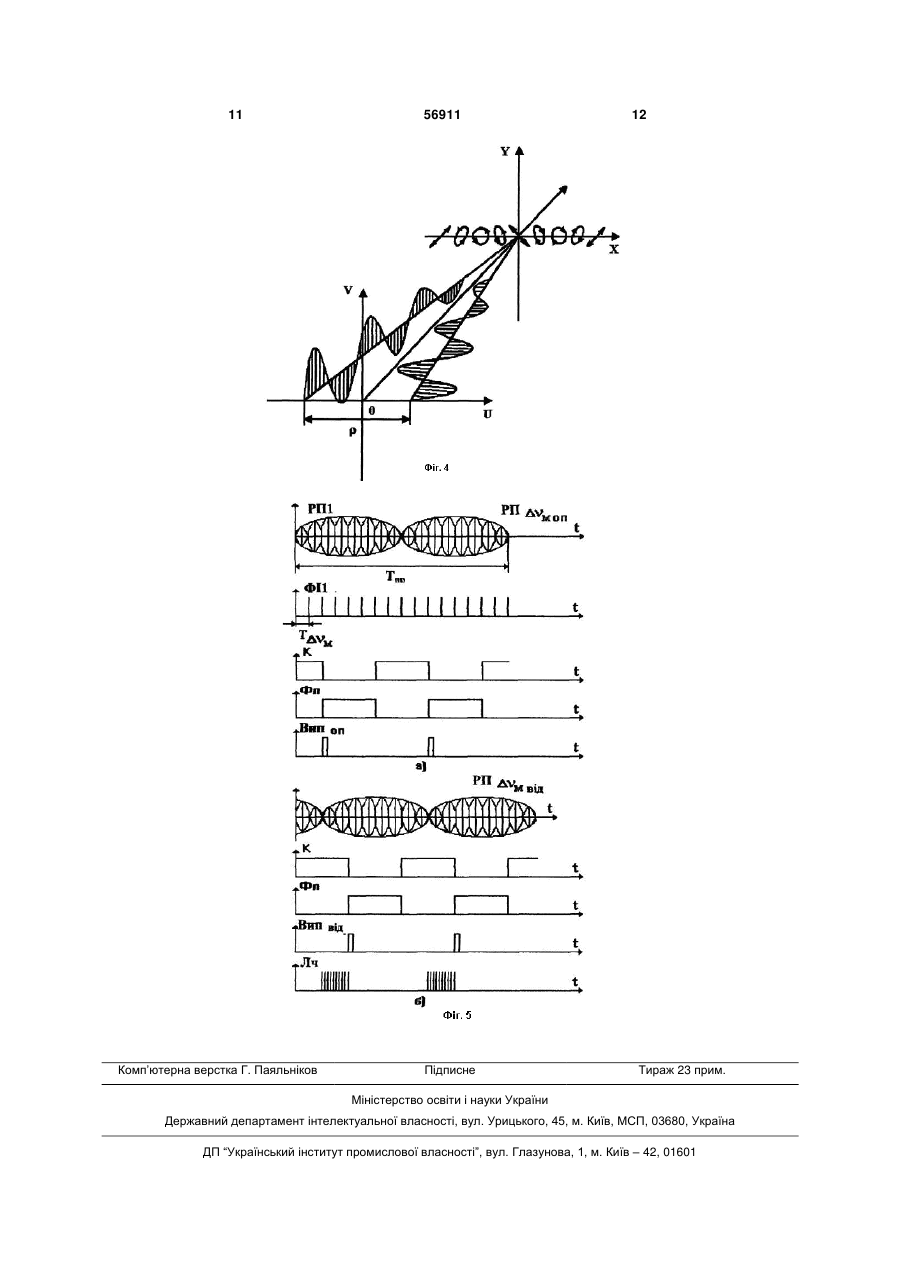
Канал вимірювання похилої дальності до літальних апаратів для ЛІВС з додатковими можливостями, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод, призми для частоти міжмодо 3 настроєні на відповідні частоти міжмодових биттів, формувач імпульсів, тригер „1”|„0”, схему „і”, лічильники, фільтр із заданою смугою пропущення, детектор, диференцюєму оптику, підсилювач, фільтр, диференцюємі ланцюжки, випрямлячі, електронно-цифрову обчислювальну машину та блок відображення вимірювальної інформації про похилу дальність R до ЛА. Недоліком каналу-прототипу є те, що він не може формувати та обробляти зображення ЛА. В основу корисної моделі поставлена задача створити канал вимірювання похилої дальності до літальних апаратів для ЛІВС з додатковими можливостями, який дозволить здійснювати виявлення ЛА у заданій зоні простору і інформаційний взаємозв'язок з ним, високоточне вимірювання похилої дальності у широкому діапазоні дальностей, починаючи з початкового моменту його польоту та, в разі необхідності, формувати і обробляти зображення ЛА. Поставлена задача вирішується за рахунок того, що у відомий канал-прототип [2], який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод, призми для частоти міжмодових биттів vм, модифікований блок дефлекторів, перемикач для частот міжмодових биттів vм і 2vм, передавальну оптику, приймальну оптику, фотодетектори, широкосмуговий підсилювач, інформаційний блок для інформаційного взаємозв'язку з ЛА, резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, формувач імпульсів, тригер „1”|„0”, схему „і”, лічильники, фільтр із заданою смугою пропущення, детектор, диференцюєму оптику, підсилювач, фільтр, диференцюємі ланцюжки, випрямлячі, електронно-цифрову обчислювальну машину та блок відображення вимірювальної інформації про похилу дальність R до ЛА, після ШП замість ІБ введено модифікований інформаційний блок (МІБ) для інформаційного взаємозв'язку з ЛА та, в разі необхідності, формування і обробки його зображення. Побудова каналу вимірювання похилої дальності R до літальних апаратів для ЛІВС з додатковими можливостями, пов'язана з використанням МЧЧМВ [3] та синхронізованого одномодового богаточастотного випромінювання єдиного лазера-передавача. Технічний результат, який може бути отриманий при здійсненні корисної моделі полягає у виявленні і інформаційному взаємозв'язку з ЛА, високоточному вимірюванні похилої дальності до ЛА у широкому діапазоні дальностей, починаючи з початкового моменту його польоту та, в разі необхідності, формуванні і обробці його зображення. На фіг. 1 приведено бік, який передає узагальненої структурної схеми запропонованого каналу. На фіг. 2 приведена узагальнена структурна схема запропонованого каналу. На фіг. 3 приведено створення рівносигнального напрямку (РСН) та сканування сумарною діаграмою спрямованості (ДС) лазерно 56911 4 го випромінювання у невеликому куті і окремо 4-мя ДС в ортогональних площинах. На фіг. 4 приведено створення лазерного сигналу із просторовою модуляцією поляризації. На фіг. 5 приведені епюри напруг з виходів блоків каналу, де: а) від блоку опорного сигналу; б) від блоку відбитого сигналу. Запропонований канал вимірювання похилої дальності до літальних апаратів для ЛІВС з додатковими можливостями містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод, призми для частоти міжмодових биттів vм, модифікований блок дефлекторів, перемикач для частот міжмодових биттів vм і 2vм, передавальну оптику, приймальну оптику, фотодетектори, широкосмуговий підсилювач, модифікований інформаційний блок для інформаційного взаємозв'язку з ЛА та, в разі необхідності, формування і обробки його зображення, резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, формувач імпульсів, тригер „1”|„0”, схему „і”, лічильники, фільтр із заданою смугою пропущення, детектор, диференцюєму оптику, підсилювач, фільтр, диференцюємі ланцюжки, випрямлячі, електронно-цифрову обчислювальну машину та блок відображення вимірювальної інформації про похилу дальність R до ЛА. Робота запропонованого каналу полягає у наступному. Із синхронізованого одномодового багаточастотного спектра випромінювання YAG:Nd3+ лазера (Лн) за допомогою СПМ [4] виділяються необхідні пари частот і окремі частоти для створення: - рівносигнального напрямку на основі формування сумарної ДС лазерного випромінювання, завдяки частково перетинаючихся 4-х парціальних діаграм спрямованості, за умовою використання комбінацій подовжніх мод («підфарбованих» різницевими частотами міжмодових биттів) v54=v5-v4=vм, v97=v9-v7=2vм, v63=v6v3=3vм, v82=v8-v2=6vм; - інформаційного каналу зв'язку, за умови використання сигналу на несучій частоті v1; лазерного сигналу із просторовою модуляцією поляризації, за умови використання сигналу з подовжньої моди (несучої частоти v10). Сигнал несучої частоти v1, минаючи МБД, потрапляє на ПРДО, де змішується (модулюється) з інформаційним сигналом від МІБ та формує інформаційний сигнал, що передається на ЛА (взаємозв'язок) (фіг. 1-3). Також, за допомогою СПМ та модифікованого інформаційного блоку створюється лазерний сигнал із просторовою модуляцією поляризації шляхом розведення лазерного випромінювання (несучої частоти v10) на два променя (v10(1) та v10(2)) з поворотом плоскості поляризації на кут 90° в одному з них (фіг. 4). При цьому випромінювання апертури першого і другого каналів в апертурної плоскості u0v рознесені на відстані . Різність ходу пучків до картинної плоскості ЛА Х0У змінюється вдовж осі X від точки до точки. Обумовлена цім різність фаз між поляризованими компонентами, що ортогональні, поля у картинної плоскості також змінюється від точки 5 до точки. В залежності від різності фаз у картинній плоскості змінюється вигляд поляризації сумарного поля сигналу, що зондує від лінійної через еліптичну і циркулюючу до лінійної, ортогональної к начальної і т.д. Період зміни вигляду поляризації визначається базою між випромінювачами та відстанню до картинної плоскості R. Розподіл інтенсивності в реєстрованому зображенні ЛА промодульовано по гармонійному закону з коефіцієнтом модуляції, дорівнює значенню ступеня поляризації випромінювання, що відбито в даній ділянці поверхні ЛА. Водночас, сигнал частот міжмодових биттів vм, 2vм, 3vм та 6vм потрапляє на МБД, який створений з 4-х п'єзоелектричних дефлекторів. Парціальні ДС лазерного випромінювання попарно зустрічно сканують МБД у кожній із двох ортогональних площин (фіг. 1, 3). Період сканування задається блоком керування дефлекторів, який разом з Лн живляться від КЕ. Проходячи через передавальну оптику, груповий лазерний імпульсний сигнал пар частот: v5,v4=vм, v9,v7=2vм, v6,v3=3vм та v8,v2=6vм фокусується в скануєми точки простору, оскільки здійснюється зустрічне сканування двома парами ДС лазерного випромінювання у кожній із двох ортогональних площин і або X і У, при цьому несуча частота v1 та лазерний сигнал із просторовою модуляцією поляризації (v10(1) та v10(2)) - проходять вдовж РСН (фіг. 3). При відбитті лазерного сигналу із просторовою модуляцією поляризації, що зондує, від поверхні ЛА змінюються амплітудні і фазові співвідношення між ортогонально поляризаційними компонентами, параметри їх поляризаційні і, відповідно, комплексні коефіцієнти когерентності відбитого поля. Просторовий розподіл поляризаційних характеристик такого відбитого сигналу по зміні контрасту модуляційної структури зображення несе також інформацію про типи матеріалів у складі поверхні ЛА, їх характеристики і тощо. Тому у МІБ здійснюється поляризаційна обробка поля, що приймається. Принцип роботи грубої шкали каналу вимірювання похилої дальності до ЛА полягає в наступному (фіг. 2, 3). На передаючому боці. Виділена селектором подовжніх мод із спектру випромінювання лазера перша пара частот v5,4, розщеплюється під дією розщепітеля (призми) на два оптичні сигнали: 1) основний - сканований МБД під певним кутом (з часом Тпр, що задається від БКД), який проходить через ключ (К) (для виділення «бланкуючого» імпульсу (бланк - нуль)) і розщепітель, де відбувається виділення додаткового сигналу (2), та поступає на ПРДО і далі на ЛА; 2) додатковий (1) - перетворюваний ФТД в електричний імпульсний сигнал різницевої частоти міжмодового биття vм - поступає на формувач імпульсів ФІ1, де відбувається виділення «пачок» імпульсів, що приймаються схемою «І». Прийняті прийомною оптикою від ЛА інформаційні та відбиті в процесі сканування чотирьох ДС, лазерні імпульсні сигнали і огинаючи сигнали ДС лазерного випромінювання за допомо 56911 6 гою ФТД перетворюються в електричні імпульсні сигнали на несучій частоті і різницевих частотах міжмодових биттів. Підсилені широкосмуговим підсилювачем вони розподіляються: - в МІБ для обробки інформації, що приймається від ЛА та відбитого лазерного сигналу із просторовою модуляцією поляризації, що зондує, від його поверхні для формування та обробки зображення ЛА; - по РП, які настроєні на відповідні частоти: vм, 2vм, 3vм, 6vм. У зв'язку з тим, що канал, який пропонується, використовується у структурі ЛІВС, імпульсні сигнали радіочастоти, що надходять з РП1 (Pvм) формують сигнал про похилу дальність до ЛА, а РП2, РП3 і РП4 (P2vм, P3vм і РП6vм) - до інших вимірювальних каналів (фіг. 1). При цьому, отриманий від ФТД додатковий оптичний сигнал частоти v5,4 з «бланкуючими» імпульсами перетворений в сигнал vм, – здобуває чіткі границі «бланкуючого» імпульсу та проходячи ДО - підсилюється. Фільтр зі смугою пропущення П=1/і (де і - тривалість імпульсу) виділяє з загального сигналу «бланкуючі» імпульси - в імпульси сигнали, що, проходячи ДЛ і Вип (ФІ=ДЛ+Вип), виділяються у вигляді одного короткого імпульсу за початок «бланкуючого» імпульсу та надходять на тригер з індексом «1» - включаючи його. На прийомному боці. Відбитий від ЛА основний сигнал частот v5,4 у сумі з груповим, минаючи ПРМО, перетворюється ФТД в електричний імпульсний сигнал vм, підсилюється ШП, виділяється в РП, як сигнал міжмодової частоти vм і, проходячи через Дет, перетворюється таким же чином, як і додатковий електричний сигнал (2) частоти vм та надходить тільки на тригер з індексом «0», «перекидаючи» його. Сигнал, що надходить з тригера на схему «І», здійснює періодичне «відкриття» і «закриття» проходу для «пачок» імпульсів з ФІ1, що підраховуються Лч і відпрацьовуються у вигляді числа R через ЕЦОМ на БВІ. Таким чином відбувається вимір R до ЛА на грубій шкалі. Перехід на точну шкалу (генерація пікосекундних імпульсів) здійснюється одразу після припинення включення ключа (для формування «бланкуючого» імпульсу). Так як канал вимірювання похилої дальності до ЛА пропонується ввести до складу структури ЛІВС з МЧЧМВ, то вмикання та вимикання ключа (К) відбувається одночасно для 2-х (пар) частот v5,4 і v9,7. Апаратурні помилки виміру R до ЛА в запропонованому каналі - це помилки визначення початку і кінця відліку часового інтервалу, помилки за рахунок дискретності і нестабільність частоти проходження тактових (рахункових) імпульсів. Точність оцінки інтервалу визначається крутістю огинаючей при заданому граничному значенні напруги Uп. Точність R до ЛА залежить від форми ДС лазерного випромінювання, що сканує, та відношення сигнал/шум. Формування сумарної ДС лазерного випромінювання, створення РСН, інформаційного каналу і лазерного сигналу із просторовою 7 модуляцією поляризації для каналу, що пропонується, пов'язано із задоволенням жорстких вимог, що пред'являються до спектру випромінювання одномодового багаточастотного лазера-передавача, тобто високоточної синхронізації подовжніх мод і стабілізації частот міжмодових биттів. В разі необхідності виявлення ЛА у заданої точки простору груповий сигнал, складений із частот міжмодових биттів сканується у вигляді сумарної ДС лазерного випромінювання за допомогою модифікованого блоку дефлекторів, де кут та напрямок відхилення сумарної ДС задається БКД (фіг. 1, 2). Джерела інформації: 1. Патент на корисну модель, № 25803, Україна, МПК G01 S 17/42, G01 S 17/66. Канал вимірювання похилої дальності до літальних апаратів для лазерної інформаційновимірювальної системи. /О.В. Коломійцев, Г.В. Альошин, В.В. Баранник та ін. - № u200703185; 56911 8 Заяв. 26.03.2007; Опубл. 27.08.2007; Бюл. № 13 - 8 с. 2. Патент на корисну модель, № 44838, Україна, МПК G01 S 17/42, G01 S 17/66. Канал вимірювання похилої дальності до літальних апаратів з додатковими можливостями. /О.В. Коломійцев, Г.В. Альошин, В.В. Бєлімов та ін. -№ u200906323; Заяв. 18.06.2009; Опубл. 12.10.2009; Бюл. № 19. - 8 с. 3. Деклараційний патент України на винахід № 65099А, Україна, МПК G01 S 17/42, G01 S 17/66. Модернізований частотно-часовий метод вимірювання параметрів руху літальних апаратів. /О.В. Коломійцев - № 2003054908; Заяв. 15.03.2004; Опубл. 15.03.2004; Бюл. № 3 - 4 с. 4. Патент на корисну модель, № 23215, Україна, МПК Н04 Q 1/453. Селектор подовжніх мод для лазерної інформаційно-вимірювальної системи. /О.В. Коломійцев, Г.В. Альошин, В.В. Баранник та ін. - № u200700070; Заяв. 02.01.2007; Опубл. 10.05.2007; Бюл. № 6 - 6 с. 9 56911 10 11 Комп’ютерна верстка Г. Паяльніков 56911 Підписне 12 Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюChannel for measurement of slantrangeto aircrafts for laser information and measuring systems with additional possibilities
Автори англійськоюKolomiitsev Oleksii Volodymyrovych, Alioshyn Hennadii Vasyliovych, Vasyliev Dmytro Hennadiiovych, Dzeverin Ihor Hryhorovych, Zlotnikov Andrii Lvovych, Mozhaiev Oleksandr Oleksandrovych, Pashkov Dmytro Pavlovych, Prykhodko Volodymyr Ivanovych, Prykhodko Dmytro Petrovych, Sachuk Ihor Ivanovych
Назва патенту російськоюКанал измерения наклонной дальности до летательных аппаратов для ливс c дополнительными возможностями
Автори російськоюКоломийцев Алексей Владимирович, Алешин Геннадий Васильевич, Васильев Дмитрий Геннадьевич, Дзеверин Игорь Григорьевич, Злотников Андрей Львович, Можаев Александр Александрович, Пашков Дмитрий Павлович, Приходько Владимир Иванович, Приходько Дмитрий Петрович, Сачук Игорь Иванович
МПК / Мітки
МПК: G01S 17/42, G01S 17/66
Мітки: апаратів, літальних, дальності, похило, лівс, додатковими, канал, вимірювання, можливостями
Код посилання
<a href="https://ua.patents.su/6-56911-kanal-vimiryuvannya-pokhilo-dalnosti-do-litalnikh-aparativ-dlya-livs-z-dodatkovimi-mozhlivostyami.html" target="_blank" rel="follow" title="База патентів України">Канал вимірювання похилої дальності до літальних апаратів для лівс з додатковими можливостями</a>
Канал вимірювання похилої дальності до літальних апаратів з додатковими можливостями
Номер патенту: 44838
Опубліковано: 12.10.2009
Автори: Копилов Олександр Олексійович, Мегельбей Ганна Василівна, Бєлімов Володимир Васильович, Хударковський Костянтин Ігорович, Рисований Олександр Миколайович, Васильєв Дмитро Геннадійович, Клівець Євген Сергійович, Коломійцев Олексій Володимирович, Альошин Геннадій Васильович, Сідченко Сергій Олександрович
МПК: G01S 17/42
Мітки: похило, можливостями, додатковими, апаратів, вимірювання, літальних, дальності, канал
Формула / Реферат:
Канал вимірювання похилої дальності до літальних апаратів з додатковими можливостями, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод (СПМ), призми для частоти міжмодових биттів Δvм, перемикач для частот міжмодових биттів Δvм і 2Δvм, передавальну оптику, приймальну оптику, фотодетектори, широкосмуговий підсилювач, інформаційний блок, резонансні підсилювачі, настроєні на...
Канал вимірювання похилої дальності до літальних апаратів для лівс з можливістю пошуку та розпізнавання ла
Номер патенту: 56910
Опубліковано: 25.01.2011
Автори: Васильєв Дмитро Геннадійович, Коломійцев Олексій Володимирович, Ставицький Олег Миколайович, Сачук Ігор Іванович, Петренко Олексій Сергійович, Приходько Володимир Мусійович, Губа Анатолій Вікторович, Можаєв Олександр Олександрович, Альошин Геннадій Васильович, Пашков Дмитро Павлович
МПК: G01S 17/42, G01S 17/66
Мітки: можливістю, літальних, вимірювання, похило, лівс, канал, розпізнавання, дальності, апаратів, пошуку
Формула / Реферат:
Канал вимірювання похилої дальності до літальних апаратів для ЛІВС з можливістю пошуку та розпізнавання ЛА, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод, призми для частоти міжмодових биттів Δνм, модифікований блок дефлекторів, перемикач для частот міжмодових биттів Δνм і 2Δνм, передавальну оптику, приймальну оптику, фотодетектори, широкосмуговий підсилювач...
Канал вимірювання похилої дальності до літальних апаратів для лвс
Номер патенту: 45541
Опубліковано: 10.11.2009
Автори: Катунін Альберт Миколайович, Рисований Олександр Миколайович, Бєлімов Володимир Васильович, Кадубенко Станіслав Валентінович, Коломійцев Олексій Володимирович, Сідченко Сергій Олександрович, Васильєв Дмитро Геннадійович, Альошин Геннадій Васильович, Толстолузька Олена Геннадіївна, Хударковський Костянтин Ігорович
МПК: G01S 17/42
Мітки: літальних, похило, лвс, апаратів, вимірювання, дальності, канал
Формула / Реферат:
Канал вимірювання похилої дальності до літальних апаратів для ЛВС, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою (Лн), блок дефлекторів, перемикач для частот міжмодових бітів Dnм і 2Dnм, призмудля частоти міжмодових бітів Dnм, передавальну оптику, приймальну оптику, фотодетектори, широкосмуговий підсилювач, резонансні підсилювачі, настроєні на відповідні частоти міжмодових бітів, формувач імпульсів, тригер,...
Канал вимірювання похилої дальності до літальних апаратів з можливістю розпізнання ла для лвс
Номер патенту: 52935
Опубліковано: 10.09.2010
Автори: Герасимов Сергій Вікторович, Воронов Дмитро Миколайович, Злотніков Андрій Львович, Коломійцев Олексій Володимирович, Рисований Олександр Миколайович, Копилов Олександр Олексійович, Клівець Сергій Іванович, Садовий Костянтин Віталійович, Воробйов Руслан Володимирович, Васильєв Дмитро Геннадійович
МПК: G01S 17/42
Мітки: лвс, дальності, похило, апаратів, можливістю, літальних, канал, вимірювання, розпізнання
Формула / Реферат:
Канал вимірювання похилої дальності до літальних апаратів з можливістю розпізнавання ЛА для ЛВС, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод, призми для частоти міжмодових биттів Dnм, блок дефлекторів, перемикач для частот міжмодових биттів Dnм і 2Dnм, передавальну оптику, приймальну оптику, фотодетектори, широкосмуговий підсилювач (ШП), резонансні підсилювачі, настроєні на відповідні...
Канал вимірювання похилої дальності літальних апаратів
Номер патенту: 43068
Опубліковано: 27.07.2009
Автори: Рисований Олександр Миколайович, Копилов Олександр Олексійович, Макаров Сергій Анатолійович, Коломійцев Олексій Володимирович, Альошин Геннадій Васильович, Хударковський Костянтин Ігорович, Катунін Альберт Миколайович, Висоцький Олег Володимирович, Бєлімов Володимир Васильович, Васильєв Дмитро Геннадійович
МПК: G01S 17/42
Мітки: похило, апаратів, канал, літальних, дальності, вимірювання
Формула / Реферат:
Канал вимірювання похилої дальності до літальних апаратів, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою (Лн), призми для частоти міжмодових бітів Dnм, блок дефлекторів, перемикач для частот міжмодових бітів Dnм і 2Dnм, передавальну оптику, приймаючу оптику, фотодетектори, широкосмуговий підсилювач, інформаційний блок, резонансні підсилювачі, настроєні на відповідні частоти міжмодових бітів, формувач імпульсів,...
Попередній патент: Канал вимірювання похилої дальності до літальних апаратів для лівс з можливістю пошуку та розпізнавання ла
Наступний патент: Канал автоматичного супроводження літальних апаратів за напрямком для лівс з можливістю формування та обробки зображення ла
Випадковий патент: Пристрій для визначення еквівалентності планів багатофакторного експерименту