Пристрій керування вітроенергетичною установкою по мережі живлення
Номер патенту: 64482
Опубліковано: 10.11.2011
Автори: Дубовик Володимир Григорович, Лебедєв Лев Миколайович, Осипова Катерина Сергіївна

Формула / Реферат
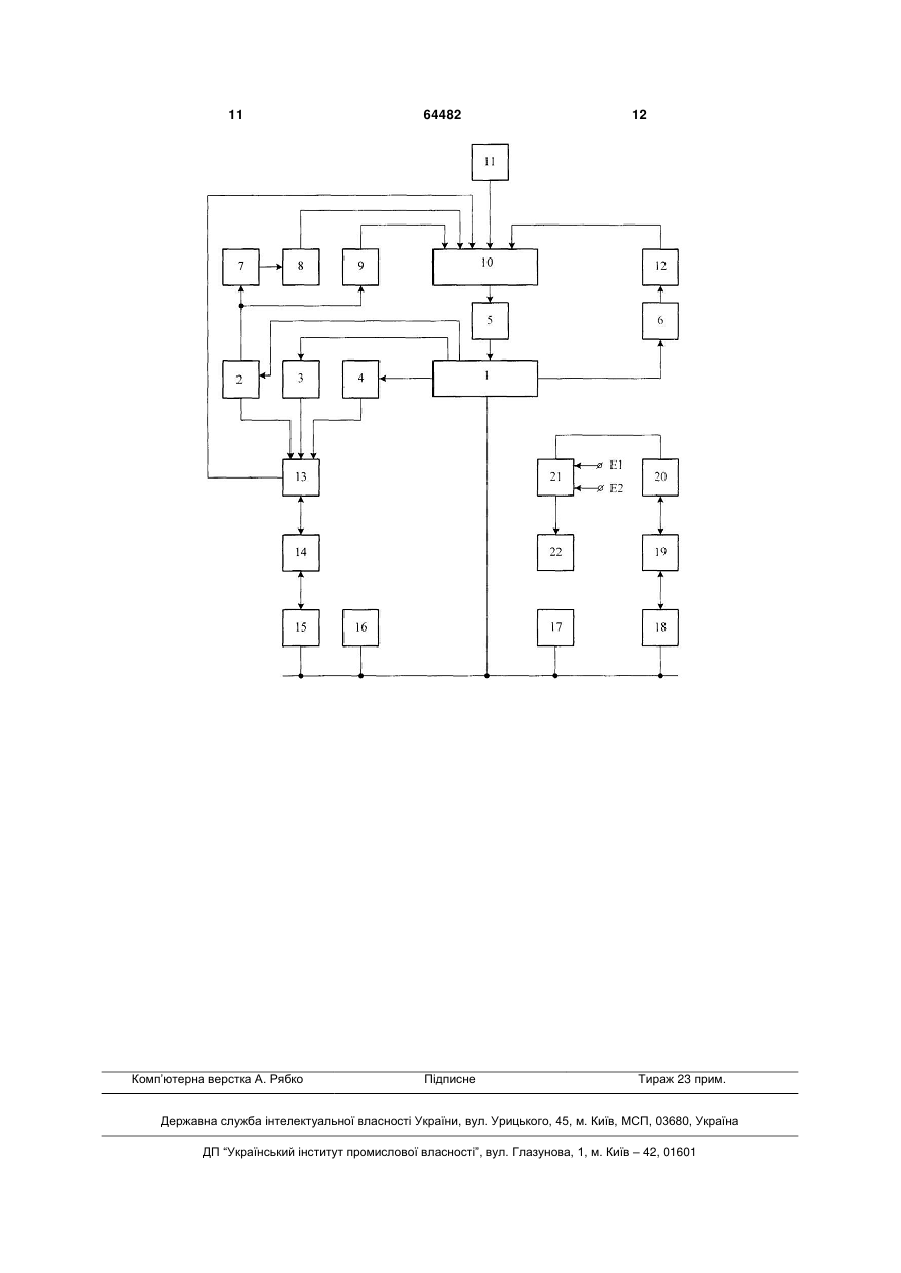
Пристрій керування вітроенергетичною установкою по мережі живлення, що містить послідовно сполучені вітродвигун, пов'язаний кінематично з генератором мережі живлення, датчик потужності генератора, підсилювач з широкою зоною нечутливості, суматор, привод регулюючий, вихід якого сполучено з входом вітродвигуна, другий вихід якого через датчик похідної крутильного моменту, смуговий фільтр сполучено з другим входом суматора, третій вхід якого сполучено з задатчиком положення, а четвертий - через підсилювач з вузькою зоною нечутливості і усереднювач з виходом датчика потужності генератора, який відрізняється тим, що додатково містить перетворювачі температури та вібрації, два блоки живлення, два джерела постійної вхідної дії, два блоки підключення, два модеми, два блоки контролерів мережі живлення, блок індикації та блок корекції, який двома входами сполучений з двома джерелами постійної вхідної дії, вихід сполучено з блоком індикації, а третій вхід через блок контролера мережі живлення, модем, блок підключення сполучено з ланцюгом мережі живлення, до якої підключено два блоки живлення, а також через другий блок підключення, другий модем, другий блок контролера мережі живлення, п'ятий вхід суматора, другий вихід датчика потужності генератора сполучено з другим входом другого блока контролера мережі живлення, третій вхід якого через перетворювач вібрації сполучено з третім виходом вітродвигуна, а четвертий вхід через перетворювач температури сполучено з четвертим виходом вітродвигуна.
Текст
Пристрій керування вітроенергетичною установкою по мережі живлення, що містить послідовно сполучені вітродвигун, пов'язаний кінематично з генератором мережі живлення, датчик потужності генератора, підсилювач з широкою зоною нечутливості, суматор, привод регулюючий, вихід якого сполучено з входом вітродвигуна, другий вихід якого через датчик похідної крутильного моменту, смуговий фільтр сполучено з другим входом суматора, третій вхід якого сполучено з задатчиком положення, а четвертий - через підсилювач з вузькою зоною нечутливості і усереднювач з виходом U 1 3 двигуном вітроенергетичної установки, що містить вітродвигун, пов'язаний кінематично з генератором, виконавчий орган вітродвигуна з приводомрегулятором, сполученим входом з виходом суматора, підключеного першим входом до задавача положення приводу-регулятора, другим входом через підсилювач з широкою зоною нечутливості до датчика потужності генератора, а третім входом через послідовно сполучені підсилювач з вузькою зоною нечутливості і усереднювач - до цього ж датчика, що відрізняється тим, що в неї додатково введений датчик швидкості зміни крутильного моменту, в ланцюзі вітродвигунгенератор, підключений виходом через смуговий фільтр до додаткового входу відомого суматора, при цьому нижня частота зрізу смугового фільтра вибрана менше власної частоти крутильних коливань ротора вітродвигуна, а верхня частота зрізу більше власної частоти крутильних коливань ротора збудженого генератора [2]. Недоліком пристрою є відсутня можливість передачі телеметричних сигналів по ланцюгах мережі живлення для керування та контролю технологічних параметрів - потужності, температури, амплітуди вібрації, а також відсутня можливість їх індикації при робочих та аварійних режимах вітроенергетичної установки. В основу корисної моделі поставлена задача удосконалення відомих пристроїв керування вітроенергетичними установками шляхом введення додаткових елементів, блоків та нових функціональних зв'язків між ними та створити новий пристрій керування вітроенергетичною установкою по мережі живлення, що забезпечує контроль технологічних параметрів - потужності, температури, амплітуди вібрації, керування та індикація при робочих та аварійних режимах вітроенергетичної установки на значних відстанях без використання додаткових ліній зв'язку. Рішення поставленої задачі досягається тим, що пристрій керування вітроенергетичною установкою по мережі живлення, що містить послідовно сполучені вітродвигун, пов'язаний кінематично з генератором мережі живлення, датчик потужності генератора, підсилювач з широкою зоною нечутливості, суматор, привод регулюючий, вихід якого сполучено з входом вітродвигуна, другий вихід якого через датчик похідної крутильного моменту, смуговий фільтр сполучено з другим входом суматора, третій вхід якого сполучено з задавачем положення, а четвертий – через підсилювач з вузькою зоною нечутливості і усереднювач з виходом датчика потужності генератора, який відрізняється тим, що додатково містить перетворювачі температури та вібрації, два блоки живлення, два джерела постійної вхідної дії, два блоки підключення, два модеми, два блоки контролерів мережі живлення, блок індикації та блок корекції, який двома входами сполучений з двома джерелами постійної вхідної дії, вихід сполучено з блоком індикації, а третій вхід через блок контролера мережі живлення, модем, блок підключення сполучено з ланцюгом мережі живлення, до якої підключено два блоки живлення, а також через другий блок підключення, другий модем, другий блок контро 64482 4 лера мережі живлення, п'ятий вхід суматора, другий вихід датчика потужності генератора сполучено з другим входом другого блока контролера мережі живлення, третій вхід якого через перетворювач вібрації сполучено з третім виходом вітродвигуна, а четвертий вхід через перетворювач температури сполучено з четвертим виходом вітродвигуна. На кресленні представлена структурна схема пристрою керування вітроенергетичною установкою по мережі живлення. Пристрій керування вітроенергетичною установкою по мережі живлення (креслення) складається з вітродвигуна 1, пов'язаного кінематично з генератором, датчика 2 потужності генератора, перетворювача вібрації 3, вхід якого сполучено з третім виходом вітродвигуна 1, четвертий вихід якого сполучено з перетворювачем температури 4, вхід сполучено з виходом привода 5 регулюючого, а другий вихід - з входом датчиком 6 похідної крутильного моменту, вихід датчика 2 потужності генератора через усереднювач 7 сполучено з підсилювачем 8 з вузькою зоною нечутливості, а також через підсилювач 9 з широкою зоною нечутливості сполучено з першим входом суматора 10, третій вхід якого сполучено з виходом задавача 11 положення, другий вхід сполучено через смуговий фільтр 12 з виходом датчика 6 похідної крутильного моменту, п'ятий вхід сполучено з виходом другого блока 13 контролера мережі живлення, другий, третій, четвертий входи якого сполучені, відповідно, з другим виходом датчика 2 потужності генератора, виходом перетворювача вібрації 3, виходом перетворювача температури 4, а перший вхід через другий модем 14, другий блок 15 підключення сполучено з ланцюгом мережі живлення, до якої підключено другий блок 16 живлення, блок 17 живлення, а також послідовно сполучені блок 18 підключення, модем 19, блок 20 контролера мережі живлення, блок 21 корекції та блок 22 індикації, блок 21 корекції двома входами сполучений, відповідно, з джерелом Е1 постійної вхідної дії та джерелом Е2 постійної вхідної дії. Вітродвигун 1 має головку з установленим в ній генератором, кінематично зв'язаним з вітроколесом і закріпленим на вертикальній опорі з можливістю обертання в горизонтальній площині, механізми виводу вітроколеса від вітру та орієнтування на вітер і систему контролю за роботою генератора. Вітроколесо повертається в своє початкове положення за допомогою пружини, зусилля якої розраховується на обумовлену швидкість вітру. Його площина орієнтується перпендикулярно напряму вітрового потоку віндрозним приводним механізмом. Обертальний момент від вітроколеса передається торсіонним валом на мультиплікатор і через обгінну муфту - на генератор. Підтримка заданої швидкості обертання вітроколеса забезпечується приводом, що змінює кут установки лопатей. Вітроколесо є робочим органом і включає закріплені на валу лопаті, що мають спеціальний аеродинамічний профіль і здатні повертатися на кут від 0 до 90° навколо власних подовжніх осей. 5 Для виключення аварійних режимів може застосовуватися система діагностики і аварійної зупинки з контролем вібрації основних елементів, температури, тиску і рівня масла, частоти обертання вітроколеса, кута повороту лопатей, струму, потужності, напруги тощо. При перевищенні контрольованими параметрами порогових значень проводиться відключення вітрооенергетичної установки і її зупинка. Перетворювач вібрації 3 може бути виконаний з послідовно сполучених датчика вібрації, перетворювача сигналів, фільтра і забезпечує формування вихідного сигналу пропорційного амплітуді вібрації на його вході. Привод 5 регулюючий змінює положення площини лопатей вітродвигуна 1 при зміні сили вітрового потоку, що дозволяє скидати зайву потужність вітродвигуна, стабілізуючи середню частоту напруги мережі. Датчик 6 похідної крутильного моменту може бути встановлений на валу вітродвигуна або генератора і може являти собою датчик похідної скручування кінематичної передачі або датчик похідної струму статора генератора, або датчик похідної швидкості вітру. В загальному випадку важлива наявність в сигналі датчика прямої або непрямої інформації про швидкість зміни обертального моменту в ланцюзі вітродвигун-генератор. Суматор 10 забезпечує формування сигналів розузгодження між заданим і фактичним значенням регульованого параметра, виконує роль гальванічного роздільника як між вхідними і вихідними ланцюгами, так і входами між собою. Смуговий фільтр 12 служить для забезпечення якісних процесів демпфування, управління і достатніх запасів стійкості в системі регулювання пристрою, для реалізації плавних, незначних демпфуючих переміщень приводу 5 регулюючого вітродвигуном 1. Електричні параметри смугового фільтра 12, а також нижня і верхня частоти його зрізу пов'язані з електромеханічними параметрами вітроенергетичної установки, власними частотами крутильних коливань ротора вітродвигуна і збудженого генератора. Блоки підключення 15 та 18 можуть бути виконані по схемі фаза-земля з послідовно сполучених конденсатора зв'язку, погоджувального трансформатора, фільтра. Конденсатор зв'язку являє собою високочастотний високовольтний конденсатор. У загальному випадку блок підключення здійснює дві функції: ізолює апаратуру комунікаційного вузла від напруги живлення і виділяє інформаційний сигнал, що проходить по електромережі. Блоки контролерів мережі живлення 13 та 20 можуть бути виконані з використанням інтегральних мікросхем, наприклад, фірми Intellon Corporation типу INT5200, INT5500 або фірми Xeline типу XPLC21, що забезпечує можливість для кожного блока контролера зв'язуватися і взаємодіяти з іншим, можливість адресації пакетів одному, групі, всім підключеним блокам контролерів мережі живлення, а також простоту підключення до іншого телекомунікаційного устаткування, інтерфейсів між абонентами через мережу живлення. Вони працюють під управлінням спеціаль 64482 6 них мікропрограм. Така технологія підключення відома, як PLC-Power Line Communications. Інформація передається в смузі частот 50-530 kHz. Принцип роботи PLC-систем заснований на розділенні за допомогою фільтрів низькочастотних електричних сигналів і високошвидкісного трафіку даних, що передається на вищих частотах. При використанні технології PLC не потрібна прокладка кабелю та використання для його коробів, а також свердлення стін і опорних конструкцій, забезпечується простота використання, короткий час для монтажу, стабільний зв'язок, висока безпека інформації, на якість зв'язку не впливає матеріал і товщина стін в будинку. Відома технологія передачі даних по силових лініях (PLC) X10 - стандарт передачі даних між передавачем і приймачем по силових лініях. Інформаційні сигнали включають короткі радіочастотні спалахи, що передають цифрову інформацію. Передача спалахів синхронізована з нулем силової напруги. Це пов'язано з тим, що біля нульової напруги рівень перешкод в мережі мінімальний. Час прийому даних - близько 200 мікросекунд. Тривалість спалаху частотою 120 кГц близько 1 мс. Бінарна одиниця - спалах тривалістю 1 мс біля нуля, бінарний нуль - відсутність спалаху. Блоки контролерів ланцюгів живлення 13, 20 є важливими функціональними блоками пристрою, які здійснюють також обробку вхідних параметрів, формують електричні сигнали управління, які надходять на блок індикації, що надає візуальну інформацію про струм, амплітуду вібрації, температуру статорної обмотки електродвигуна, який знаходиться в аварійному стані, електричний сигнал надходить на блок управління для виключення електродвигуна. В пристрої передбачений роз'єм для підключення програматора, який дозволяє записувати програми в контролери, а також забезпечує спряження пристрою з комп'ютером. Модеми 14, 19 є передавачами-приймачами, забезпечують гальванічну розв'язку між вхідними і вихідними сигналами і можуть бути реалізовані з використання мікросхем, наприклад, AMIS-30585. Блок 21 корекції забезпечує порівняння вхідних значень контрольованих параметрів вібрації та температури з пороговими, які задаються джерелами Е1, Е2 постійної вхідної дії, і передачу аварійних сигналів на блок 22 індикації. Він також дозволяє формувати сигнали кореції керування вітроенергетичною установкою. Сигнали можуть прийматися та передаватися по послідовній лінії. Блок 22 індикації забезпечує запам'ятовування аварійних режимів з їх індикацією в вигляді сигналів для кожного каналу при таких аварійних ситуаціях: а) перевищення допустимого значення температури; б) перевищення допустимого значення амплітуди вібрації; в) відсутність сигналу від датчика 2 потужності генератора. Число ліній зв'язку між блоком 21 корекції і блоком 22 індикації встановлюється в залежності від кількості сигналів, а на кресленні умовно показана одна лінія. 7 Блоки живлення 16 та 17 підводять напругу, відповідно, до блоків, елементів 1-15, які забезпечують приймання та перетворення аварійних сигналів та блоків, елементів 18-22, які забезпечують формування і перетворення інформаційних сигналів. і Прийняті позначення Un - амплітуда сигналу на і-му виході n-го блока. Працює пристрій наступним чином. У початковому стані за відсутності збурень і змін обертального моменту, вихідний сигнал датчика 6 похідної крутильного моменту рівний нулю. При появі зміни моменту на виході датчика 6 формується відповідний сигнал, що поступає через смуговий фільтр 12 в потрібній фазі на другий вхід суматора 10, вихід якого діє на роботу привода 5 регулюючого і відбувається поворот площин лопатей вітродвигуна 1 у бік компенсації виниклої зміни обертального моменту. Таким чином, шляхом додаткових переміщень в потрібній фазі площин лопатей вітродвигуна 1 здійснюється активне демпфування крутильних коливань в ланцюзі вітродвигунгенератор практично без розсіяння енергії вітрового потоку. Для виключення резонансних явищ і забезпечення амортизації ударних обертальних навантажень на валу генератора власна частота крутильних коливань ротора вітродвигуна вибрана менше власної частоти крутильних коливань ротора збудженого генератора. При силі вітру, що перевищує номінальну, починає працювати контур обмеження потужності через датчик 2 потужності генератора та підсилювача 9 з широкою зоною нечутливості і при цьому змінюється значення сигналу на першому вході суматора 10, вихід якого діє на роботу привода 5 регулюючого, аналогічно, розглянутому раніше. Сигнали датчика 2 потужності генератора, перетворювача вібрації 3, перетворювача температури 4 подаються постійно при роботі пристрою на блок 13 контролера мережі живлення, з виходу якого через другий модем 14, другий блок 15 підключення подаються в ланцюг живлення, який сполучає вихід генератора вітродвигуна 1 з приймачами електроенергії, а також через блок 18 підключення, модем 19 на блок 20 контролера мережі живлення і далі на блок 21 корекції. Він забезпечує порівняння вхідних значень контрольованих параметрів вібрації та температури з пороговими, які задаються джерелами E1, E2 постійної вхідної дії та передачу аварійних сигналів на блок 22 індикації. Сигнал з перетворювача вібрації 3, що забезпечує вимірювання значення амплітуди вібрації вітродвигуна 1, подається на пороговий елемент в блоці 21 корекції, на другий вхід якого подається сигнал джерела Е1 постійної вхідної дії. На виході порогового елемента з'являється сигнал у випадку зношування підшипників і підвищенні вібрації вала генератора, порушенні центрування або балансування осі вітродвигуна 1. Уставка постійного вхідної дії Е1 залежить від потужності установки, відповідно до ГОСТ ИСО 10816-1-97. Перетворювач температури 12, забезпечує вимірювання значення температури обмоток генератора, його підшипників і формує пропорційний 64482 8 сигнал, який подається на другий пороговий елемент блока 21 корекції, на другий вхід якого подається сигнал джерела Е2 постійної вхідної дії. На кресленні порогові елементи в блоці 21 корекції не показані. На виході порогового елемента з'являється сигнал при тривалому перевантаженні генератора, зміні умов його охолодження. Уставка постійного вхідної дії Е2 залежить від класу ізоляції генератора й умов його використання. 1 Формування аварійного сигналу U21 від перетворювача 3 вібрації виконується за умови 2 2 U21 =1 при U20 >Е2, 2 2 U21 =0 при U20 Е2, 2 2 U21 =0 при U20
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for control of a wind-driven power plant by power supply network
Автори англійськоюDubovyk Volodymyr Hryhorovych, Lebediev Lev Mykolaiovych, Osypova Kateryna Serhiivna
Назва патенту російськоюУстройство управления ветроэнергетической установкой по сети питания
Автори російськоюДубовик Владимир Григорьевич, Лебедев Лев Николаевич, Осипова Екатерина Сергеевна
МПК / Мітки
МПК: F03D 7/04
Мітки: установкою, живлення, вітроенергетичною, пристрій, мережі, керування
Код посилання
<a href="https://ua.patents.su/6-64482-pristrijj-keruvannya-vitroenergetichnoyu-ustanovkoyu-po-merezhi-zhivlennya.html" target="_blank" rel="follow" title="База патентів України">Пристрій керування вітроенергетичною установкою по мережі живлення</a>
Пристрій керування насосною установкою
Номер патенту: 28955
Опубліковано: 25.12.2007
Автори: Мошноріз Микола Миколайович, Грабко Володимир Віталійович
МПК: F04D 15/00
Мітки: установкою, насосною, пристрій, керування
Формула / Реферат:
Пристрій керування насосною установкою, що містить асинхронний двигун, відцентровий насос, перетворювач для живлення силового кола двигуна, два суматори, обчислювальний блок, блок задання конструктивних і енергетичних параметрів відцентрового насоса та параметрів мережі споживача, причому вхід перетворювача для живлення силового кола двигуна з’єднаний з трифазною мережею живлення, вал асинхронного двигуна підключений до вала робочого колеса...
Система регулювання вітроенергетичною установкою
Номер патенту: 50687
Опубліковано: 25.06.2010
Автори: Субота Анатолій Максимович, Кулік Анатолій Степанович, Гаєвая Діана Олександрівна, Пономаренко Тамара Ігорівна
МПК: F03D 7/00, F03D 7/04, F03D 7/02
Мітки: вітроенергетичною, установкою, система, регулювання
Формула / Реферат:
Система управління вітроенергетичною установкою, що містить регулятор, анемометри, датчики зворотнього зв'язку, яка відрізняється тим, що послідовно з'єднані між собою виходами з входами відповідно підсилювач потужності, електродвигун сервоприводу, виходи анемометрів горизонтальної складової швидкості вітру з'єднані відповідно з першим і другим входами блока обробки повітряної швидкості, виходи анемометрів вертикальної складової швидкості...
Пристрій для захисту асинхронного електродвигуна по мережі живлення

Номер патенту: 64316
Опубліковано: 10.11.2011
Автори: Пилипчук Андрій Олександрович, Дубовник Володимир Григорович, Лебедєв Лев Миколайович
МПК: H02H 7/09
Мітки: пристрій, захисту, асинхронного, мережі, живлення, електродвигуна
Формула / Реферат:
Пристрій для захисту асинхронного електродвигуна по мережі живлення, що містить блок живлення, блок датчиків струму з датчиками, сполученими по схемі "зірка", нульова точка якої сполучена з "загальним" провідником пристрою, блок управління, що включає електромагнітний пускач з контактами управління та котушкою, сполученою з виходом ключового елемента, підключеним першим входом до входу блока, другий вхід ключового...
Система керування двигуновою установкою літального апарата
Номер патенту: 61817
Опубліковано: 17.11.2003
Автори: Лазоркін Юрій Юрійович, Кулік Анатолій Степанович, Бандура Іван Миколайович, Дигало Оксана Миколаївна, Цехмейстер Олена Олексіївна
МПК: B64D 31/00
Мітки: двигуновою, система, установкою, апарата, літального, керування
Формула / Реферат:
Система керування двигуновою установкою літального апарата, що містить датчик частоти обертання ротора двигуна, електричний привід паливного агрегату, з'єднаний з паливним агрегатом, яка відрізняється тим, що в неї введені датчик тиску повітря за компресором, послідовно з'єднаний з блоком регулювань точності датчика тиску, датчик температури повітря за вентилятором, послідовно з'єднаний із блоком регулювань точності датчика температури, блок...
Пристрій керування імпульсною електрогідравлічною установкою
Номер патенту: 52097
Опубліковано: 10.08.2010
Автори: Старков Микола Володимирович, Аврамець Данило Ростиславович
МПК: B21D 26/00
Мітки: пристрій, електрогідравлічною, керування, імпульсною, установкою
Формула / Реферат:
Пристрій керування імпульсною електрогідравлічною установкою, що містить високовольтну частину, яка включає джерело постійної високої напруги, батарею конденсаторів, керований розрядник, подільник напруги, блок зсуву потенціалу, блок підпалу, опорний резистор і електроди, та низьковольтну частину, яка включає джерело опорної напруги, пороговий елемент, формувач імпульсів і підсилювач потужності, який відрізняється тим, що низьковольтна...
Попередній патент: Мобільна система для навчання із застосуванням комп’ютерного тестування
Наступний патент: Пристрій для складання робочого колеса хрестовинного типу поворотно-лопатевої гідротурбіни
Випадковий патент: Слідкуюча система з динамічним компенсатором збурень