Система регулювання вітроенергетичною установкою
Номер патенту: 50687
Опубліковано: 25.06.2010
Автори: Гаєвая Діана Олександрівна, Кулік Анатолій Степанович, Субота Анатолій Максимович, Пономаренко Тамара Ігорівна
Формула / Реферат
Система управління вітроенергетичною установкою, що містить регулятор, анемометри, датчики зворотнього зв'язку, яка відрізняється тим, що послідовно з'єднані між собою виходами з входами відповідно підсилювач потужності, електродвигун сервоприводу, виходи анемометрів горизонтальної складової швидкості вітру з'єднані відповідно з першим і другим входами блока обробки повітряної швидкості, виходи анемометрів вертикальної складової швидкості вітру відповідно з'єднані з третім і четвертим входами блока обробки повітряної швидкості, виходи задатчиків мінімальної і максимальної швидкості вітру відповідно з'єднані з п'ятим і шостим входами блока обробки повітряної швидкості, вихід якого з'єднаний з першим входом першого суматора, другий вхід першого суматора з'єднаний з виходом другого суматора, перший і другий входи другого суматора відповідно з'єднані з виходами датчика зворотнього зв'язку кута повороту лопаті і датчика зворотнього зв'язку кутової швидкості повороту лопаті, входи яких з'єднані з першим виходом вітроенергетичної установки, вихід першого суматора з'єднаний з першим входом третього суматора, третій вхід третього суматора з'єднаний з задатчиком потужності, а другий вхід з'єднаний з виходом четвертого суматора, перший вхід четвертого суматора через датчик зворотнього зв'язку кутової швидкості ротора вітроенергетичноїустановки з'єднаний з п'ятим виходом вітроенергетичної установки, а другий і третій входи четвертого суматора відповідно через датчик зворотнього зв'язку потужності електрогенератора і датчик зворотнього зв'язку кутової швидкості ротора електрогенератора відповідно з'єднані з третім і четвертим виходами вітроенергетичної установки, вихід третього суматора з'єднаний з входом регулятора, вихід якого з'єднаний з входом підсилювача потужності, з другим входом вітроенергетичної установки додатково через датчик кутового прискорення ротора вітроенергетичної установки з'єднаний третій вхід блока обробки перевантаження, другий вхід якого з'єднаний з виходом задатчика величини максимального кутового прискорення ротора вітроенергетичної установки, перший вхід - з виходом задатчика максимальної швидкості вітру, вихід блока обробки перевантаження з'єднаний з другим входом електродвигуна сервоприводу.
Текст
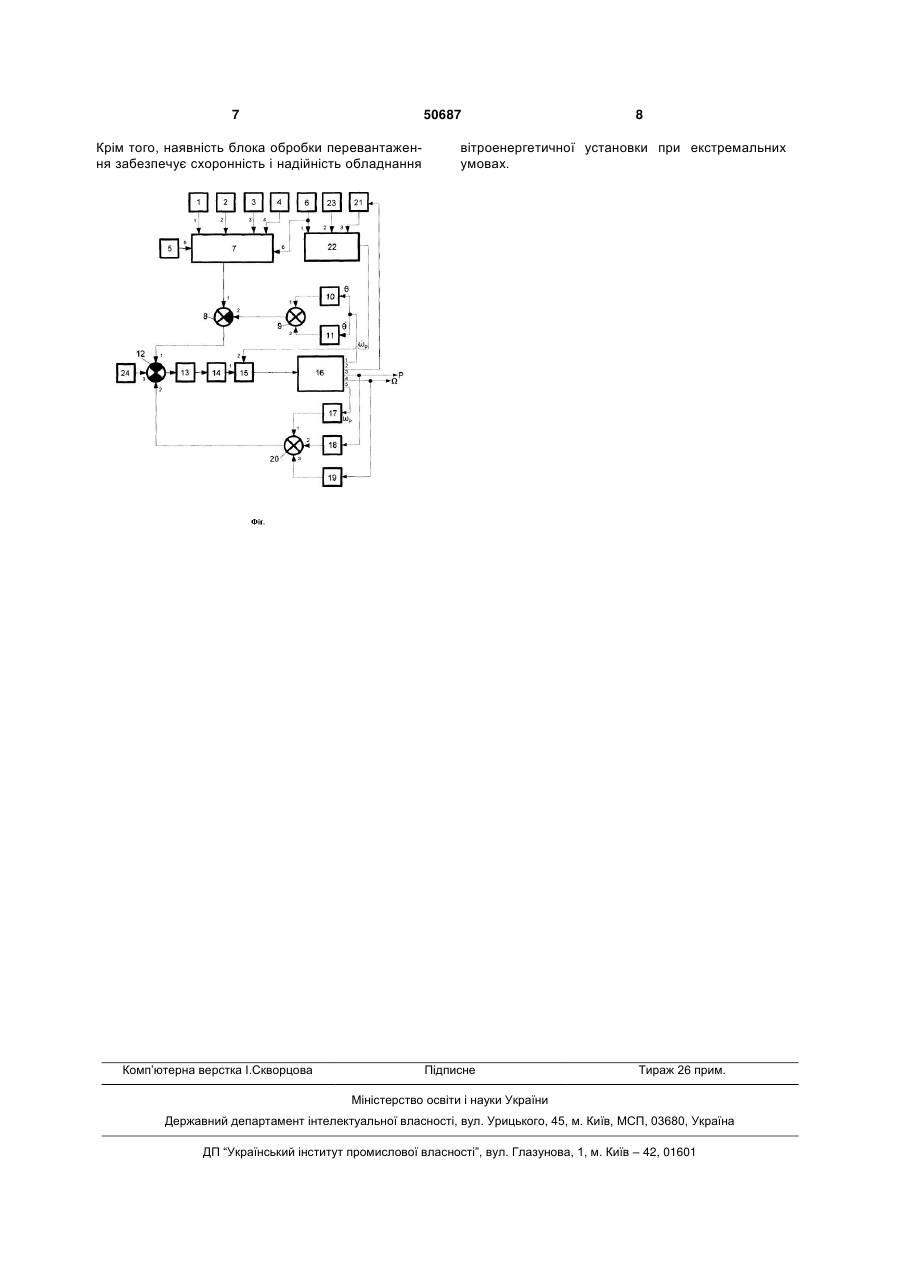
Система управління вітроенергетичною установкою, що містить регулятор, анемометри, датчики зворотнього зв'язку, яка відрізняється тим, що послідовно з'єднані між собою виходами з входами відповідно підсилювач потужності, електродвигун сервоприводу, виходи анемометрів горизонтальної складової швидкості вітру з'єднані відповідно з першим і другим входами блока обробки повітряної швидкості, виходи анемометрів вертикальної складової швидкості вітру відповідно з'єднані з третім і четвертим входами блока обробки повітряної швидкості, виходи задатчиків мінімальної і максимальної швидкості вітру відповідно з'єднані з п'ятим і шостим входами блока обробки повітряної швидкості, вихід якого з'єднаний з першим входом першого суматора, другий вхід першого суматора з'єднаний з виходом другого суматора, перший і другий входи другого суматора відповідно з'єднані з виходами датчика зворотнього зв'язку кута пово U 2 (19) 1 3 ктрично з'єднаний в мостову схему з балансовим реле, яке підключає електричний двигун і датчик зворотного зв'язку. До складу пристрою також включено регулятор та профільований кулачок, що забезпечує відключення електричного двигуна при повороті лопатей на заданий кут. До недоліків запропонованого пристрою відноситься низька точність і якість регулювання швидкості вітроколеса і обумовлена з цим низька якість виробленої електроенергії. Задачею корисної моделі є підвищення точності і якості регулювання роботи вітроенергетичної установки. Поставлена задача вирішується завдяки тому, що в системі управління вітроенергетичною установкою, що містить регулятор, анемометри, датчики зворотнього зв'язку, яка відрізняється тим, що послідовно з'єднані між собою виходами з входами відповідно підсилювач потужності, електродвигун сервоприводу, виходи анемометрів горизонтальної складової швидкості вітру з'єднані відповідно з першим і другим входами блока обробки повітряної швидкості, виходи анемометрів вертикальної складової швидкості вітру відповідно з'єднані з третім і четвертим входами блока обробки повітряної швидкості, виходи задатчиків мінімальної і максимальної швидкості вітру відповідно з'єднані з п'ятим і шостим входами блока обробки повітряної швидкості, вихід якого з'єднаний з першим входом першого суматора, другий вхід першого суматора з'єднаний з виходом другого суматора, перший і другий входи другого суматора відповідно з'єднані з виходами датчика зворотнього зв'язку кута повороту лопаті і датчика зворотнього зв'язку кутової швидкості повороту лопаті, входи яких з'єднані з першим виходом вітроенергетичної установки, вихід першого суматора з'єднаний з першим входом третього суматора, третій вхід третього суматора з'єднаний з задатчиком потужності, а другий вхід з'єднаний з виходом четвертого суматора, перший вхід четвертого суматора через датчик зворотнього зв'язку кутової швидкості ротора вітроенергетичної установки з'єднаний з п'ятим виходом вітроенергетичної установки, а другий і третій входи четвертого суматора відповідно через датчик зворотнього зв'язку потужності електрогенератора і датчик зворотнього зв'язку кутової швидкості ротора електрогенератора відповідно з'єднані з третім і четвертим виходами вітроенергетичної установки, вихід третього суматора з'єднаний з входом регулятора, вихід якого з'єднаний з входом підсилювача потужності, з другим входом вітроенергетичної установки додатково через датчик кутового прискорення ротора вітроенергетичної установки з'єднаний третій вхід блока обробки перевантаження, другий вхід якого з'єднаний з виходом задатчика величини максимального кутового прискорення ротора вітроенергетичної установки, перший вхід - з виходом задатчика максимальної швидкості вітру, вихід блока обробки перевантаження з'єднаний з другим входом електродвигуна сервоприводу. Як відомо підйомна сила крила відхиляється на величину кута зносу потоку від того напряму, яке б воно займало би при відсутності верти 50687 4 кальної швидкості вітрового потоку W. За рахунок зміни напряму підйомної сили виникає додаткова сила аеродинамічного опору. При цьому кут зносу потоку можна підрахувати як: tg W/V, (1) де V - швидкість горизонтальної складової вітру. Таким чином, якщо для побудови системи управління вітроенергетичною установкою додатково з інформацією про швидкість горизонтальної складової швидкості вітру використовувати інформацію ще й про вертикальну складову вітру, то якість регулювання швидкістю обертання ротора вітроенергетичної установки підвищиться, а відповідно підвищиться і якість параметрів електроенергії, що виробляється електрогенератором. Окрім цього, підвищення якості роботи вітроенергетичної установки досягається за рахунок введення датчиків вимірювання параметрів, пов'язаних як з параметрами руху лопатей, так і з параметрами, що відображають реакцію цього руху в якість обертання роторів вітроенергетичної установки і електрогенератора. Таким чином, поставлена задача повністю відповідає даній корисній моделі. На фіг. відображена функціональна схема системи управління вітроенергетичної установки. Система управління вітроенергетичною установкою вміщує анемометри горизонтальної складової швидкості вітру 1 і 2, анемометри вертикальної складової швидкості вітру 3 і 4, задатчики мінімальної і максимальної швидкості вітру 5 і 6, блок обробки повітряної швидкості 7, відповідно перший і другий суматори 8 і 9, датчик зворотнього зв'язку кута повороту лопаті 10, датчик зворотнього зв'язку кутової швидкості повороту лопаті 11, третій суматор 12, регулятор 13, підсилювач потужності 14, електродвигун сервоприводу 15, вітроенергетична установка 16, датчик зворотнього зв'язку кутової швидкості ротора вітроенергетичної установки 17, датчик зворотнього зв'язку потужності електрогенератора 18, датчик зворотнього зв'язку кутової швидкості ротора електрогенератора 19, четвертий суматор 20, датчик кутового прискорення ротора вітроенергетичної установки 21, блок обробки перевантаження 22, задатчик величини максимального кутового прискорення ротора вітроенергетичної установки 23, задатчик потужності вітроенергетичної установки 24. Анемометр горизонтальної складової швидкості вітру 1 установлений зверху вітроколеса вітроенергетичної установки, а анемометр горизонтальної складової швидкості вітру 2 установлений знизу вітроколеса. При цьому їх розташування співпадає з вертикальною віссю симетрії вітроколеса. Аналогічно анемометри вертикальної складової швидкості вітру 3 і 4 розташовані з лівого і з правого боку вітроколеса вздовж горизонтальної осі його симетрії. Виходи анемометрів 1, 2, 3, 4, задатчиків мінімальної 5 і максимальної швидкості вітру 6 з'єднані відповідно з першим, другим, третім, четвертим, п'ятим та шостим входами блока обробки повітряної швидкості 7. Вихід блока 7 з'єднаний з першим входом першого суматора 8, другий вхід якого з'єднаний з виходом другого суматора 9. Перший та другий входи другого сума 5 тора 9 відповідно з'єднані з виходами датчика зворотнього зв'язку кута повороту лопаті 10 і датчика зворотнього зв'язку кутової швидкості повороту лопаті 11. Входи датчиків 10 і 11 з'єднані з першим виходом вітроенергетичної установки 16. Вихід першого суматора 8 з'єднаний з першим входом третього суматора 12, другий вхід якого з'єднаний з виходом четвертого суматора 20, а третій з'єднаний з за датчиком потужності вітроенергетичної установки 24. Вихід третього суматора з'єднаний з входом регулятора 13. Вихід регулятора 13 з'єднаний з входом підсилювача потужності 14, вихід якого з'єднаний з першим входом електродвигуна сервоприводу 15. Вихід електродвигуна сервоприводу 15 з'єднаний з входом вітроенергетичної установки 16. Входи датчиків зворотнього зв'язку кутової швидкості ротора вітроенергетичної установки 16, датчика зворотнього зв'язку потужності електрогенератора 18, датчика зворотнього зв'язку кутової швидкості ротора електрогенератора 19 відповідно з'єднані з п'ятим, третім та четвертим виходами вітроенергетичної установки 16. Виходи датчиків зворотнього зв'язку 17, 18 і 19 відповідно з'єднані з першим, другим і третім входами четвертого суматора 20. Вхід датчика кутового прискорення ротора вітроенергетичної установки 21 з'єднаний з другим виходом вітроенергетичної установки 16, а його вихід з'єднаний з третім входом блока обробки перевантаження 22. Додатково другий і перший входи блока 22 відповідно з'єднані з задатчиком величини максимального кутового прискорення ротора вітроенергетичної установки 23 і задатчиком максимальної швидкості вітру 6. Вихід блока обробки перевантаження 22 з'єднаний з другим входом електродвигуна сервоприводу 15. Принцип дії системи управління вітроенергетичною установкою полягає в наступному. Вихідні сигнали V1 і V2 з анемометрів 1, 2 горизонтальної складової швидкості вітру і з анемометрів 3, 4 вертикальної складової швидкості вітру V3, V4 поступають відповідно на перший, другий, третій та четвертий входи блока обробки повітряної швидкості 7, де обчислюється середнє значення швидкості вітру V1 V2 V3 V4 Vср 4 . (2) Якщо величина Vcp відповідає умові Vmin Vcp Vmax доп , (3) Vmin і Vmax доп відповідають поде значення переднім розрахункам і подаються на відповідні входи п'ятий та шостий блока 7 від за датчиків мінімальної та максимальної швидкості вітру 5 і 6, то з виходу блока 7 виробляється сигнал UV K V Vcp Vmin , (4) K V - постійний коефіцієнт. де Вихідний сигнал з блока обробки повітряної швидкості 7 поступає на перший вхід першого суматора 8, на другий вхід якого подається сигнал з виходу другого суматора 9. Оскільки на перший вхід другого суматора 9 подається сигнал з виходу датчика зворотнього зв'язку кута повороту лопаті 10, а на другий вхід подається сигнал з виходу 50687 6 датчика зворотнього зв'язку кутової швидкості повороту лопаті 11, то на виході другого суматора 9 формується сигнал U K K , (5) K , K - постійні коефіцієнти; де - відповідно кут і кутова швидкість повороту лопаті вітроенергетичної установки. Таким чином, на перший вхід третього суматора 12 подається сигнал, що дорівнює U1 UV U K V Vcp Vmin K K . (6) На другий вхід третього суматора 12 подається сигнал з виходу четвертого суматора 20, що дорівнює U2 K p p K KpP , (7) K p K K де , , p - постійні коефіцієнти; p - кутова швидкість ротора вітроенергетичної установки; - кутова швидкість ротора електрогенератора; P - потужність електрогенератора. На третій вхід третього суматора 12 подається сигнал, пропорційний завданню необхідної потужності: Uзр K зрPз , (8) K де зр - постійний коефіцієнт; Pз - задана потужність вітроенергетичної установки. Таким чином, на вхід регулятора 13 подається загальний сигнал U Uзр K V Vcp Vmin K K K p p K KpP . (9) Для захисту вітроенергетичної установки від недопустимих швидкостей вітру або при недопустимих прискореннях ротора вітроенергетичної установки в системі передбачений блок обробки перевантаження 22. Сигнали з виходів датчика кутового прискорення ротора вітроенергетичної установки 21, задатчика максимальної швидкості вітру 6 та задатчика величини максимального кутового прискорення ротора вітроенергетичної установки 23 поступають на відповідні входи третій, перший та другий блока обробки перевантаження 22. При умовах, коли швидкість вітру V або прискорення p перевищують допустимі значення на виході блока обробки перевантаження 22 формується сигнал, який поступає на другий вхід електродвигуна сервоприводу 15. Під дією цього сигналу лопаті вітроенергетичної установки 16 займають флюгерне положення і вітроенергетична установка зупиняє свою роботу. Таким чином, використання закону управління, що представлений у вигляді виразу (9), забезпечує якісне регулювання швидкості обертання ротора електрогенератора, а як слідство, забезпечується якісне постачання електроенергії споживачам. 7 50687 Крім того, наявність блока обробки перевантаження забезпечує схоронність і надійність обладнання Комп’ютерна верстка І.Скворцова 8 вітроенергетичної установки при екстремальних умовах. Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for control of wind-driven power plant
Автори англійськоюKulik Anatolii Stepanovych, Subota Anatolii Maksymovych, Haievaia Diana Oleksandrivna, Ponomarenko Tamara Ihorivna
Назва патенту російськоюСистема регулирования ветроэнергетической установки
Автори російськоюКулик Анатолий Степанович, Субота Анатолий Максимович, Гаевая Диана Александровна, Пономаренко Тамара Игоревна
МПК / Мітки
МПК: F03D 7/00, F03D 7/02, F03D 7/04
Мітки: система, регулювання, вітроенергетичною, установкою
Код посилання
<a href="https://ua.patents.su/4-50687-sistema-regulyuvannya-vitroenergetichnoyu-ustanovkoyu.html" target="_blank" rel="follow" title="База патентів України">Система регулювання вітроенергетичною установкою</a>
Екологічно чистий літальний апарат комбінований з вітроенергетичною установкою
Номер патенту: 58329
Опубліковано: 15.07.2003
Автор: Калюжний Валерій Вілінович
МПК: B64B 1/06, F03D 9/02, B64B 1/24
Мітки: літальний, чистий, комбінований, апарат, вітроенергетичною, установкою, екологічної
Формула / Реферат:
Літальний апарат, комбінований з вітроенергетичною установкою, який виконано у вигляді дирижабля з циліндричним газозаповненим корпусом, звуженим на кінцях і оснащеним рулями управління польотом, гондолою для розміщення в ній людей і обладнання, який відрізняється тим, що додатково забезпечений накопичувачем енергії, виконаним у вигляді набору акумуляторів, які є одночасно баластом дирижабля, а також корпус дирижабля виконаний у вигляді...
Пристрій керування насосною установкою
Номер патенту: 28955
Опубліковано: 25.12.2007
Автори: Мошноріз Микола Миколайович, Грабко Володимир Віталійович
МПК: F04D 15/00
Мітки: насосною, пристрій, керування, установкою
Формула / Реферат:
Пристрій керування насосною установкою, що містить асинхронний двигун, відцентровий насос, перетворювач для живлення силового кола двигуна, два суматори, обчислювальний блок, блок задання конструктивних і енергетичних параметрів відцентрового насоса та параметрів мережі споживача, причому вхід перетворювача для живлення силового кола двигуна з’єднаний з трифазною мережею живлення, вал асинхронного двигуна підключений до вала робочого колеса...
Система керування двигуновою установкою літального апарата
Номер патенту: 61817
Опубліковано: 17.11.2003
Автори: Бандура Іван Миколайович, Цехмейстер Олена Олексіївна, Дигало Оксана Миколаївна, Лазоркін Юрій Юрійович, Кулік Анатолій Степанович
МПК: B64D 31/00
Мітки: керування, установкою, система, апарата, двигуновою, літального
Формула / Реферат:
Система керування двигуновою установкою літального апарата, що містить датчик частоти обертання ротора двигуна, електричний привід паливного агрегату, з'єднаний з паливним агрегатом, яка відрізняється тим, що в неї введені датчик тиску повітря за компресором, послідовно з'єднаний з блоком регулювань точності датчика тиску, датчик температури повітря за вентилятором, послідовно з'єднаний із блоком регулювань точності датчика температури, блок...
Пристрій регулювання швидкості
Номер патенту: 20041
Опубліковано: 15.01.2007
Автори: Верба Олександр Сергійович, Гранюк Оксана Сергіївна, Суббота Анатолій Максимович
МПК: G05D 13/00
Мітки: регулювання, пристрій, швидкості
Формула / Реферат:
Пристрій регулювання швидкості, що містить у своєму складі датчик обертів, формувач тривалості імпульсів, елемент І, генератор постійної частоти, ключі, блок формування регулюючого сигналу, який відрізняється тим, що датчик обертів через фільтр з'єднаний з першим входом компаратора формувача тривалості імпульсів, другий вхід якого з'єднаний з генератором пилкоподібної напруги, а вихід з'єднаний з першим входом елемента І, другий вхід якого...
Керований фазообертач
Номер патенту: 12457
Опубліковано: 15.02.2006
Автори: Долгін Володимир Прохорович, Долгін Ігор Володимирович
МПК: H03H 11/02
Мітки: фазообертач, керований
Формула / Реферат:
Керований фазообертач, що містить суматори і блок пам'яті, який відрізняється тим, що на вхід суматора 1 поступає вхідний сигнал і інверсний вихідний сигнал блока пам'яті 5, вихід суматора 1 з'єднаний з входом підсилювача 4 з коефіцієнтом посилення h/T, де h - крок дискретизації, вихід підсилювача 4 з'єднаний з входом суматора 2, другий вхід якого з'єднаний з виходом блока пам'яті 5, вихід суматора 2 з'єднаний з двома входами суматора 3 і...
Попередній патент: Канатно-стержнева опорна система
Наступний патент: Кутер
Випадковий патент: Газова зброя