Слідкуюча система з динамічним компенсатором збурень
Номер патенту: 36874
Опубліковано: 10.11.2008
Автори: Дибська Ирина Юріївна, Бандура Іван Миколайович, Лугових Наталя Ігорівна
Формула / Реферат
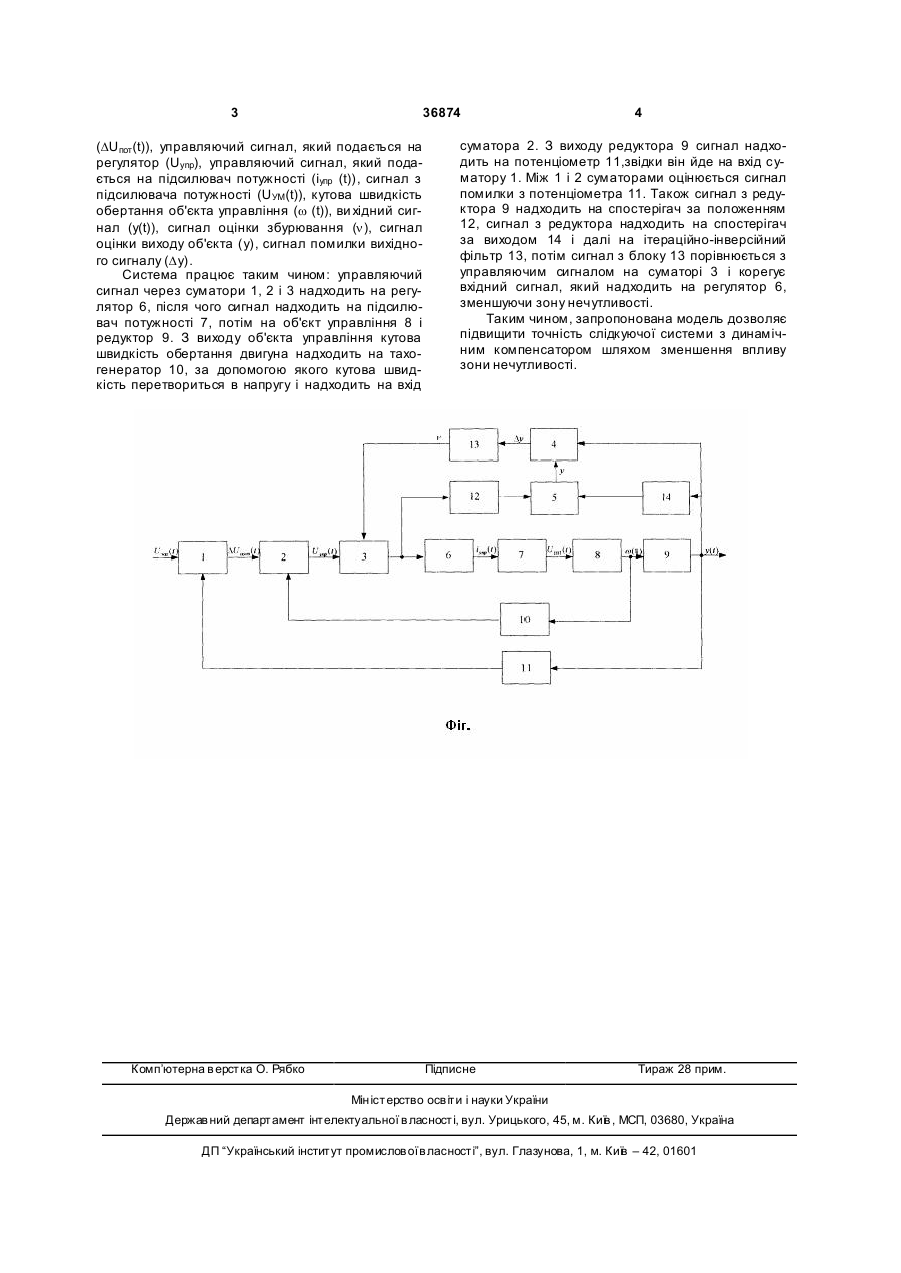
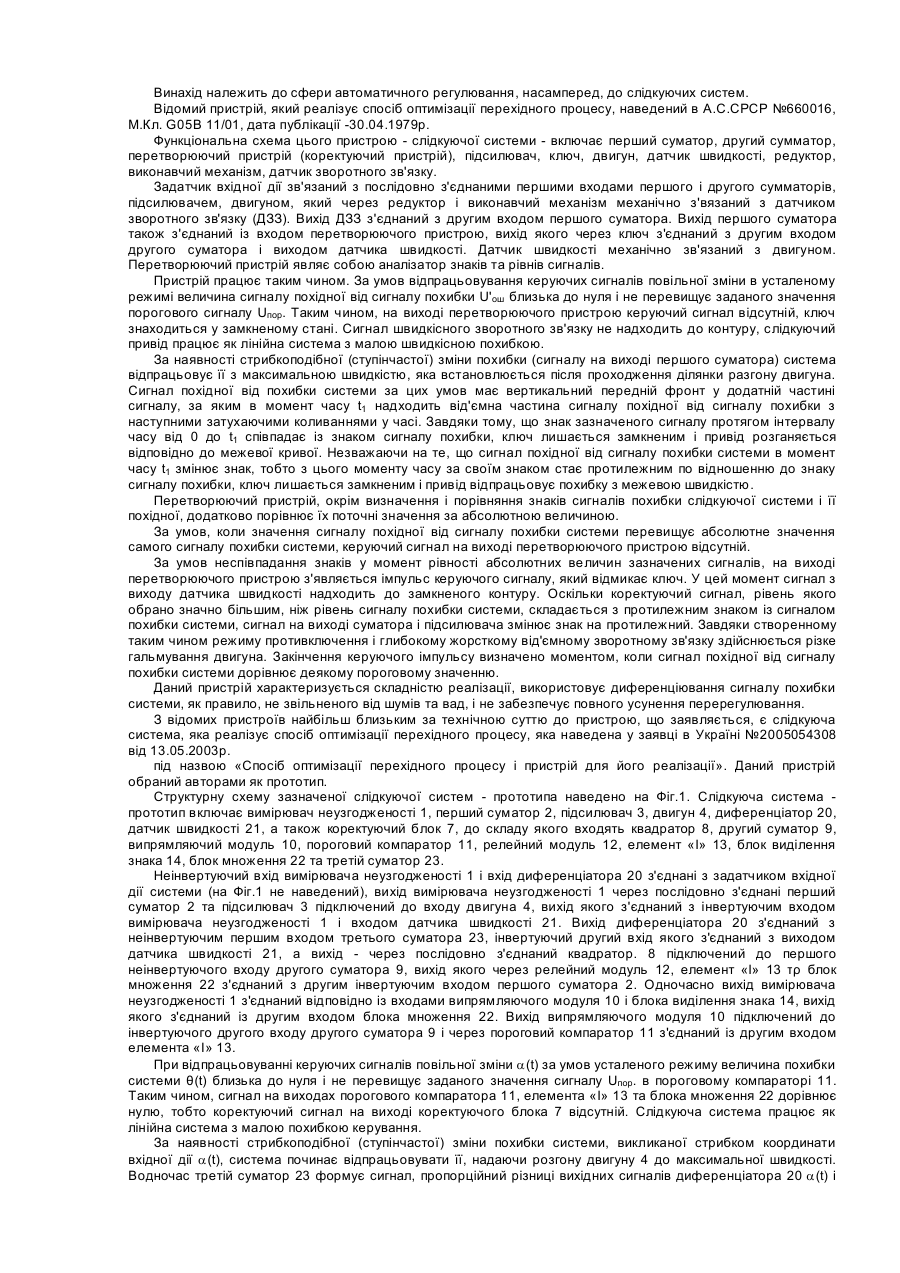
Слідкуюча система з динамічним компенсатором збурень, що містить регулятор, який послідовно з'єднаний з підсилювачем потужності, об'єктом керування, редуктором, вихід об'єкта керування також підключений до входу тахогенератора, вихід якого підключений до входу другого суматора, а вихід редуктора підключений до входу потенціометра, вихід якого підключений до входу першого суматора, яка відрізняється тим, що в неї введені система спостереження за виходом, вхід якої з'єднаний з виходом редуктора, а також зі входом четвертого суматора, вихід якого підключений до входу ітераційно-інверсійного фільтра, вихід якого підключений до входу третього суматора, спостерігач за станом, вхід якого підключений до входу регулятора, а вихід підключений через п'ятий суматор до входу четвертого суматора.
Текст
Слідкуюча система з динамічним компенсатором збурень, що містить регулятор, який послідовно з'єднаний з підсилювачем потужності, об'єктом керування, редуктором, вихід об'єкта керування 3 36874 (DUпот (t)), управляючий сигнал, який подається на регулятор (Uynp), управляючий сигнал, який подається на підсилювач потужності (іупр (t)), сигнал з підсилювача потужності (UУМ(t)), кутова швидкість обертання об'єкта управління (w (t)), ви хідний сигнал (у(t)), сигнал оцінки збурювання (n), сигнал оцінки виходу об'єкта (у), сигнал помилки вихідного сигналу (Dу). Система працює таким чином: управляючий сигнал через суматори 1, 2 і 3 надходить на регулятор 6, після чого сигнал надходить на підсилювач потужності 7, потім на об'єкт управління 8 і редуктор 9. З виходу об'єкта управління кутова швидкість обертання двигуна надходить на тахогенератор 10, за допомогою якого кутова швидкість перетвориться в напругу і надходить на вхід Комп’ютерна в ерстка О. Рябко 4 суматора 2. З виходу редуктора 9 сигнал надходить на потенціометр 11,звідки він йде на вхід суматору 1. Між 1 і 2 суматорами оцінюється сигнал помилки з потенціометра 11. Також сигнал з редуктора 9 надходить на спостерігач за положенням 12, сигнал з редуктора надходить на спостерігач за виходом 14 і далі на ітераційно-інверсійний фільтр 13, потім сигнал з блоку 13 порівнюється з управляючим сигналом на суматорі 3 і корегує вхідний сигнал, який надходить на регулятор 6, зменшуючи зону нечутливості. Таким чином, запропонована модель дозволяє підвищити точність слідкуючої системи з динамічним компенсатором шляхом зменшення впливу зони нечутливості. Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюServo system with dynamic compensator of disturbances
Автори англійськоюDybska Iryna Yuriivna, Bandura Ivan Mykolaiovych, Luhovykh Natalia Ihorivna
Назва патенту російськоюСледящая система с динамическим компенсатором возмущений
Автори російськоюДыбская Ирина Юрьевна, Бандура Иван Николаевич, Луговых Наталья Игоревна
МПК / Мітки
МПК: B23C 1/00
Мітки: динамічним, слідкуюча, збурень, компенсатором, система
Код посилання
<a href="https://ua.patents.su/2-36874-slidkuyucha-sistema-z-dinamichnim-kompensatorom-zburen.html" target="_blank" rel="follow" title="База патентів України">Слідкуюча система з динамічним компенсатором збурень</a>
Слідкуюча система
Номер патенту: 62671
Опубліковано: 15.12.2003
Автори: Клименко Віталій Валерійович, Соколов Юрий Миколайович, Мухлаєв Сергій Вікторович, Субота Анатолій Максимович
МПК: G05B 11/01, G05B 19/02, F15B 9/00, G06F 11/07
Формула / Реферат:
Слідкуюча система, що містить датчик положення вхідного вала, датчик положення вихідного вала, вимірювач неузгодження, підсилювач, привід навантаження, яка відрізняється тим, що додатково містить мікроконтролер, який через узгоджуючий інтерфейс з'єднаний з входом крокового двигуна, вихідний вал якого через редуктор і кінематичний зв'язок з'єднаний з ротором датчика положення вхідного вала, вихід якого через перший підсилювач з'єднаний з одним...
Слідкуюча система
Номер патенту: 79546
Опубліковано: 25.06.2007
Автори: Стефанович Віктор Тарасович, Мотуз Георгій Іванович, Стеба Олександр Михайлович, Кралін Володимир Всеволодович, Корсун Валентин Петрович
МПК: G05B 11/00, G05B 11/01
Формула / Реферат:
Слідкуюча система, яка включає вимірювач неузгодженості, перший і другий суматори, перший і другий перетворювачі "код-напруга", підсилювач, двигун, датчик кута, функціональний кодуючий перетворювач і коректуючий блок, до складу якого входять блок масштабуючого коефіцієнта, перший і другий випрямляючі модулі, пороговий компаратор і блок множення, при цьому вихід першого суматора через перший перетворювач «код-напруга» підключений до...
Слідкуюча система
Номер патенту: 63756
Опубліковано: 15.08.2005
Автори: Старков Юрій Володимирович, Кралін Володимир Всеволодович, Стеба Олександр Михайлович, Корсун Валентин Петрович, Стефанович Віктор Тарасович, Орляк Микола Васильович, Мотуз Георгій Іванович
МПК: G05B 11/01, G05B 11/00
Формула / Реферат:
Лінійний хвильовий п'єзоелектричний двигун, що містить дві притиснуті одна до одної однією або двома плоскими фрикційними поверхнями дві частини з можливістю їх взаємного зміщення, одна з яких є п'єзоелемент у формі бруска з трьома парами електродів на плоских протилежних поверхнях, крайні з яких перехресно з'єднані між собою, між якими розміщена третя пара електродів, який відрізняється тим, що брусок виконаний з одного матеріалу постійного...
Слідкуюча система
Номер патенту: 78405
Опубліковано: 15.03.2007
Автори: Мотуз Георгій Іванович, Стефанович Віктор Тарасович, Кралін Володимир Всеволодович, Корсун Валентин Петрович, Стеба Олександр Михайлович
МПК: G05B 11/01, G05B 11/00
Формула / Реферат:
Слідкуюча система, яка включає вимірювач неузгодженості, перший суматор, перший і другий перетворювачі "код-напруга", підсилювач, двигун, датчик кута, функціональний кодуючий перетворювач і коректуючий блок, до складу якого входять другий суматор, випрямний модуль і пороговий компаратор, при цьому вихід першого перетворювача "код-напруга" з'єднаний з неінвертуючим першим входом першого суматора, вихід якого через...
Приймально-підсилювальний тракт гідролокаційної системи з широким динамічним діапазоном
Номер патенту: 80355
Опубліковано: 10.09.2007
Автори: Клочан Юрій Анатолійович, Гончар Анатолій Іванович, Клочан Валентина Іванівна, Шличек Любов Іванівна
МПК: G01S 7/295, G01S 7/285
Мітки: гідролокаційної, діапазоном, тракт, системі, широким, динамічним, приймально-підсилювальний
Формула / Реферат:
Приймально-підсилювальний тракт гідролокаційної системи, що містить вхідний малошумлячий підсилювач, підсилювальний каскад, однопівперіодний випрямляч сигналів позитивної полярності, аналого-цифровий перетворювач, пристрій обробки та відображення інформації, пристрій керування, причому перший вихід пристрою керування підключений до першого входу пристрою обробки та відображення інформації, другий вхід якого з'єднаний з виходом...
Попередній патент: Знімач для демонтажу з валів деталей, встановлених з натягом
Наступний патент: Спосіб і механізм регулювання кута випередження впорскування палива до циліндрів дизеля
Випадковий патент: Реактивне сопло