Комірка датчика для системи збору інформації

Формула / Реферат
Комірка датчика для системи збору інформації, що містить елемент затримки, модулятор, обмежувач струму і ключ, вихід елемента затримки з'єднаний зі входом модулятора, вихід котрого з'єднаний з керуючим входом ключа, до першого керованого виводу ключа під'єднаний вивід обмежувача струму, другий керований вивід ключа під'єднаний до одного проводу лінії зв'язку, що є спільним проводом живлення усіх елементів пристрою, другий провід лінії зв'язку під'єднаний до виводів живлення елемента затримки і модулятора та до другого виводу обмежувача струму, яка відрізняється тим, що для підвищення стабільності позиціонування ШІМ-сигналу за рахунок переходу до цифрового (лічильникового) методу формування затримки, елемент затримки виконано у вигляді генератора імпульсів та поєднаного з ним лічильника, а в схему елемента затримки введено також тригер і ланцюг передустановки лічильника на задане число по появі напруги живлення, вивід переповнення лічильника з'єднано зі входом установки тригера в "лог. 1", вихід тригера є виходом елемента затримки.
Текст
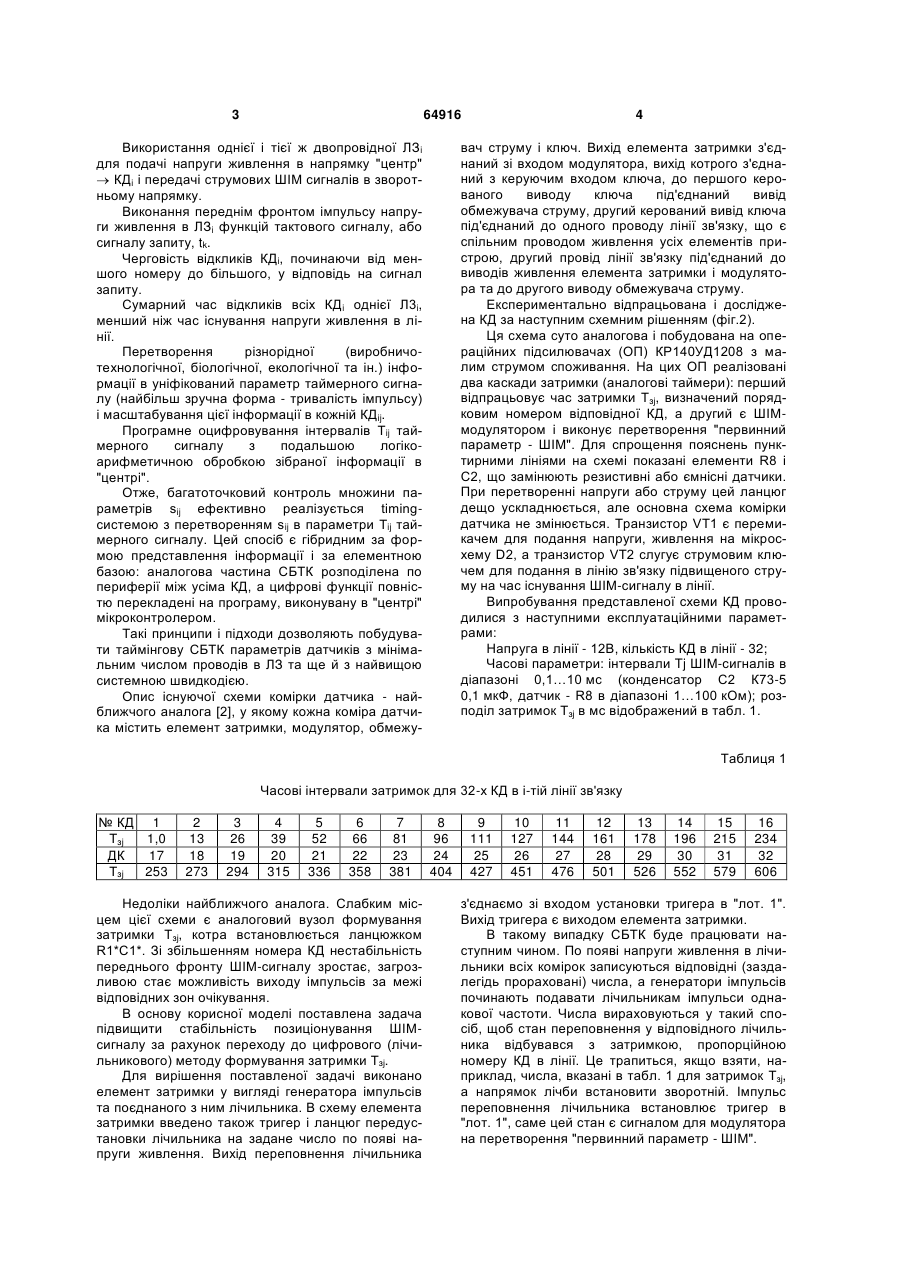
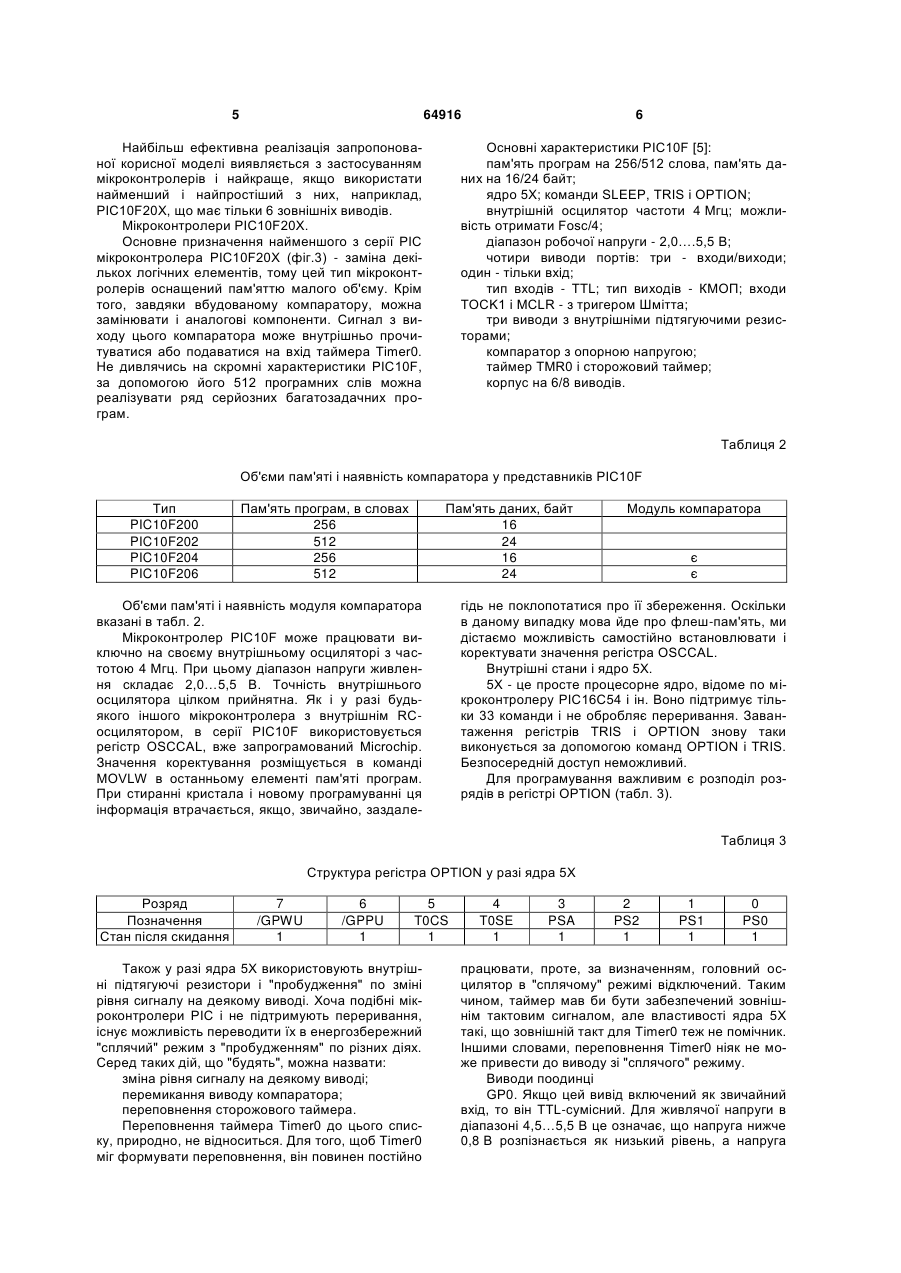
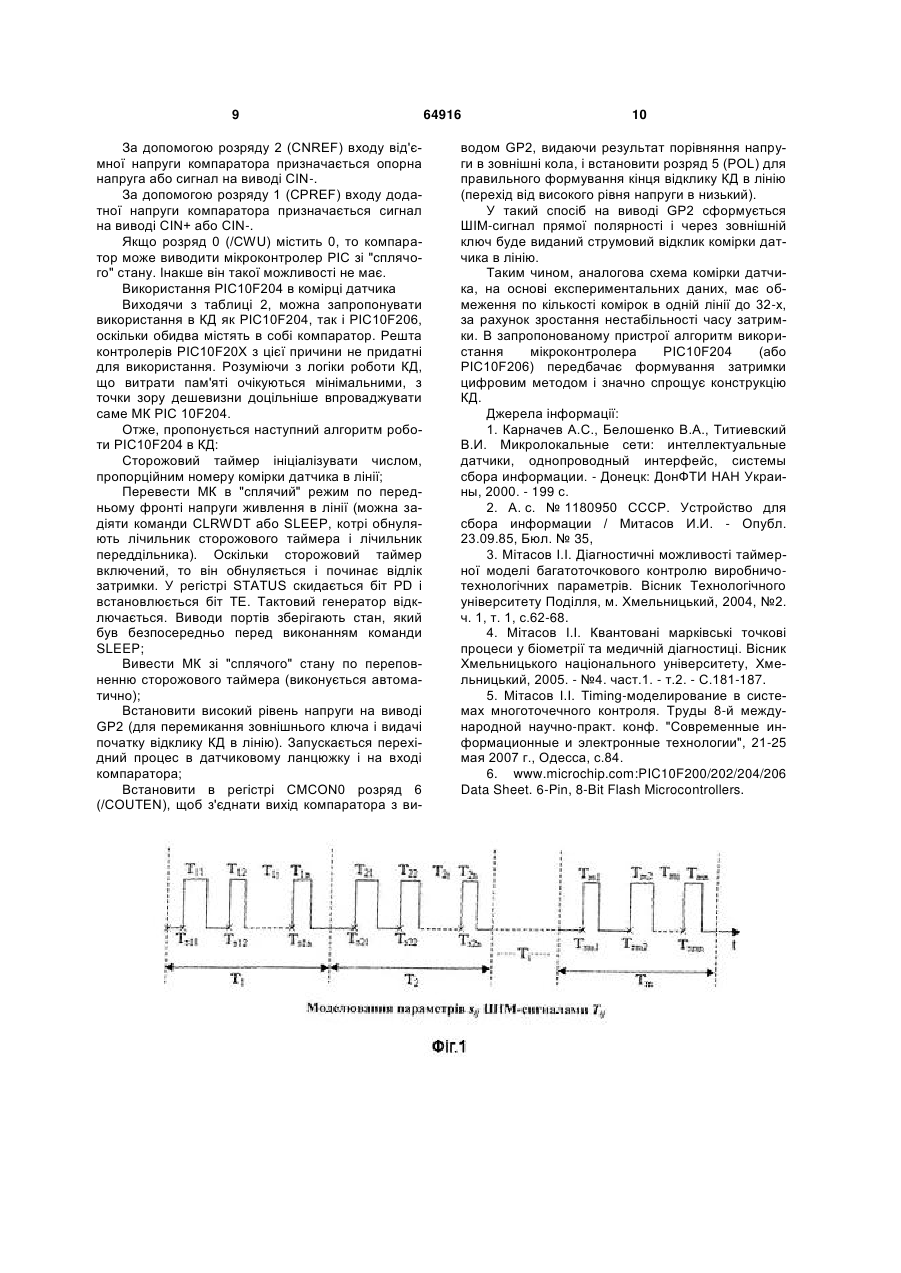
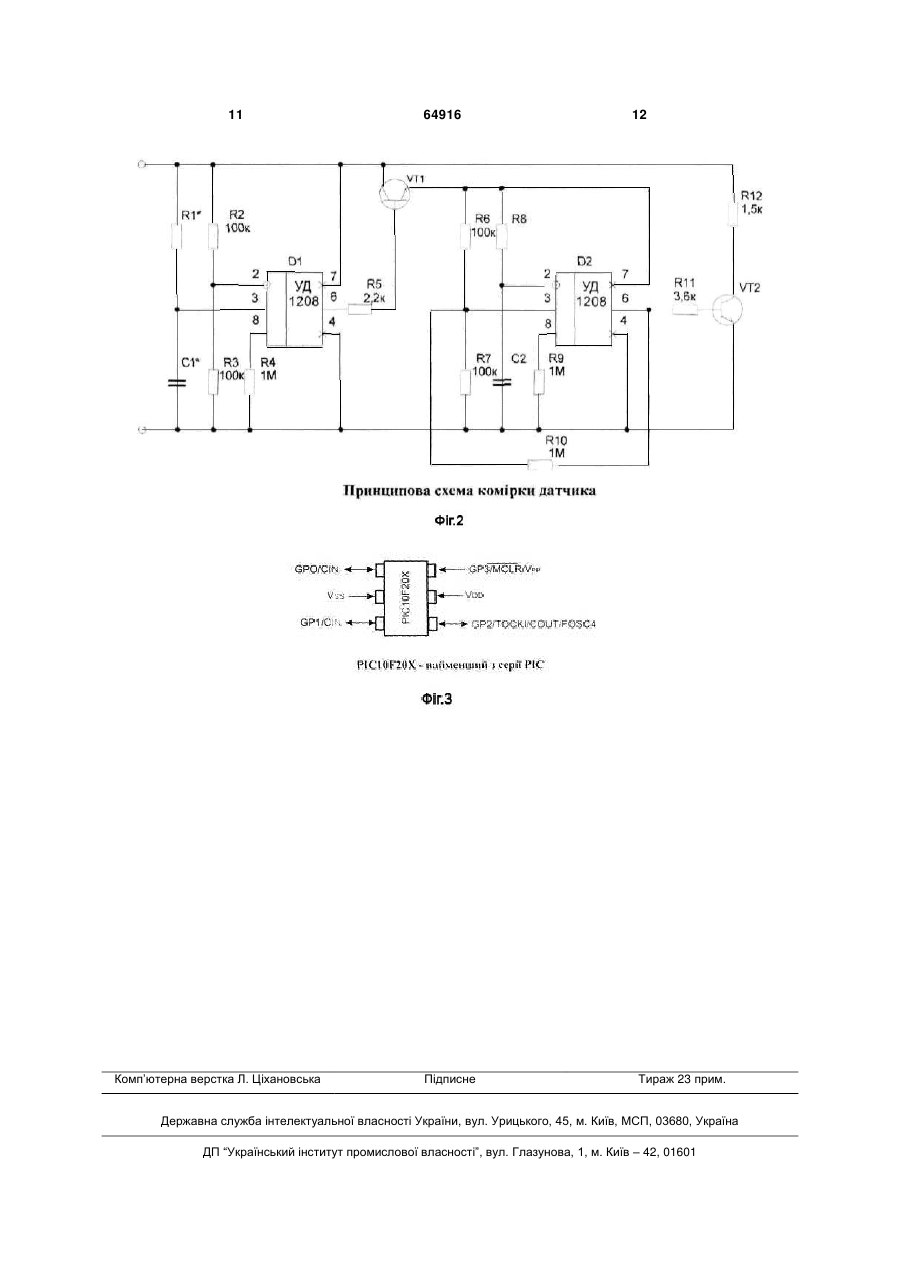
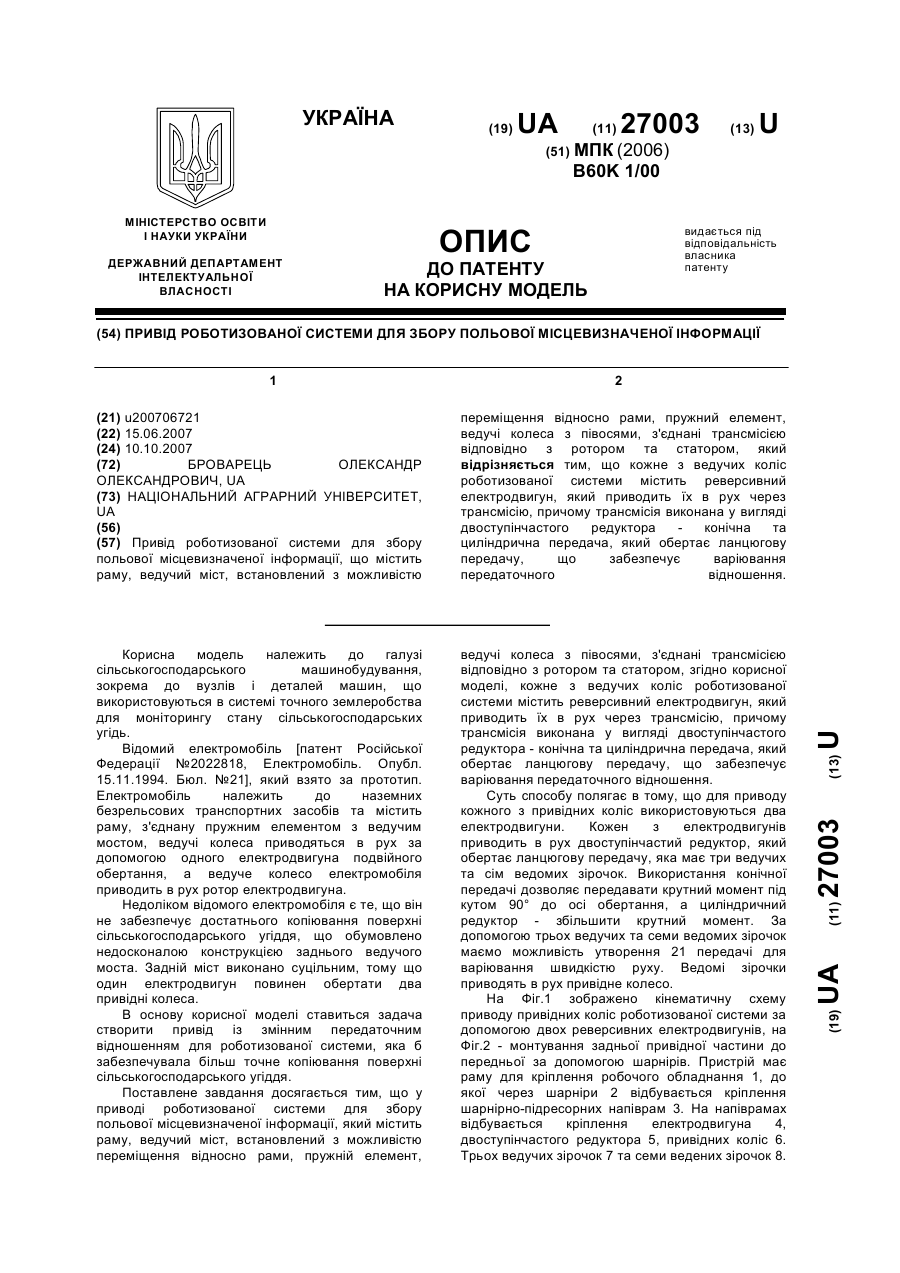
Комірка датчика для системи збору інформації, що містить елемент затримки, модулятор, обмежувач струму і ключ, вихід елемента затримки з'єднаний зі входом модулятора, вихід котрого з'єднаний з керуючим входом ключа, до першого керованого виводу ключа під'єднаний вивід обмежувача струму, другий керований вивід ключа під'єднаний до одного проводу лінії зв'язку, що є 3 64916 Використання однієї і тієї ж двопровідної ЛЗi для подачі напруги живлення в напрямку "центр" КДi і передачі струмових ШІМ сигналів в зворотньому напрямку. Виконання переднім фронтом імпульсу напруги живлення в ЛЗi функцій тактового сигналу, або сигналу запиту, tk. Черговість відкликів КДi, починаючи від меншого номеру до більшого, у відповідь на сигнал запиту. Сумарний час відкликів всіх КДi однієї Л3i, менший ніж час існування напруги живлення в лінії. Перетворення різнорідної (виробничотехнологічної, біологічної, екологічної та ін.) інформації в уніфікований параметр таймерного сигналу (найбільш зручна форма - тривалість імпульсу) і масштабування цієї інформації в кожній КДij. Програмне оцифровування інтервалів Тij таймерного сигналу з подальшою логікоарифметичною обробкою зібраної інформації в "центрі". Отже, багатоточковий контроль множини параметрів sij ефективно реалізується timingсистемою з перетворенням sij в параметри Тij таймерного сигналу. Цей спосіб є гібридним за формою представлення інформації і за елементною базою: аналогова частина СБТК розподілена по периферії між усіма КД, а цифрові функції повністю перекладені на програму, виконувану в "центрі" мікроконтролером. Такі принципи і підходи дозволяють побудувати таймінгову СБТК параметрів датчиків з мінімальним числом проводів в ЛЗ та ще й з найвищою системною швидкодією. Опис існуючої схеми комірки датчика - найближчого аналога [2], у якому кожна коміра датчика містить елемент затримки, модулятор, обмежу 4 вач струму і ключ. Вихід елемента затримки з'єднаний зі входом модулятора, вихід котрого з'єднаний з керуючим входом ключа, до першого керованого виводу ключа під'єднаний вивід обмежувача струму, другий керований вивід ключа під'єднаний до одного проводу лінії зв'язку, що є спільним проводом живлення усіх елементів пристрою, другий провід лінії зв'язку під'єднаний до виводів живлення елемента затримки і модулятора та до другого виводу обмежувача струму. Експериментально відпрацьована і досліджена КД за наступним схемним рішенням (фіг.2). Ця схема суто аналогова і побудована на операційних підсилювачах (ОП) КР140УД1208 з малим струмом споживання. На цих ОП реалізовані два каскади затримки (аналогові таймери): перший відпрацьовує час затримки Тзj, визначений порядковим номером відповідної КД, а другий є ШІМмодулятором і виконує перетворення "первинний параметр - ШІМ". Для спрощення пояснень пунктирними лініями на схемі показані елементи R8 і С2, що замінюють резистивні або ємнісні датчики. При перетворенні напруги або струму цей ланцюг дещо ускладнюється, але основна схема комірки датчика не змінюється. Транзистор VT1 є перемикачем для подання напруги, живлення на мікросхему D2, а транзистор VT2 слугує струмовим ключем для подання в лінію зв'язку підвищеного струму на час існування ШІМ-сигналу в лінії. Випробування представленої схеми КД проводилися з наступними експлуатаційними параметрами: Напруга в лінії - 12В, кількість КД в лінії - 32; Часові параметри: інтервали Tj ШІМ-сигналів в діапазоні 0,1…10 мс (конденсатор С2 К73-5 0,1 мкФ, датчик - R8 в діапазоні 1…100 кОм); розподіл затримок Тзj в мс відображений в табл. 1. Таблиця 1 Часові інтервали затримок для 32-х КД в і-тій лінії зв'язку № КД 1 Тзj 1,0 ДК 17 Тзj 253 2 13 18 273 3 26 19 294 4 39 20 315 5 52 21 336 6 66 22 358 7 81 23 381 Недоліки найближчого аналога. Слабким місцем цієї схеми є аналоговий вузол формування затримки Тзj, котра встановлюється ланцюжком R1*C1*. Зі збільшенням номера КД нестабільність переднього фронту ШІМ-сигналу зростає, загрозливою стає можливість виходу імпульсів за межі відповідних зон очікування. В основу корисної моделі поставлена задача підвищити стабільність позиціонування ШІМсигналу за рахунок переходу до цифрового (лічильникового) методу формування затримки Тзj. Для вирішення поставленої задачі виконано елемент затримки у вигляді генератора імпульсів та поєднаного з ним лічильника. В схему елемента затримки введено також тригер і ланцюг передустановки лічильника на задане число по появі напруги живлення. Вихід переповнення лічильника 8 96 24 404 9 111 25 427 10 127 26 451 11 144 27 476 12 161 28 501 13 178 29 526 14 196 30 552 15 215 31 579 16 234 32 606 з'єднаємо зі входом установки тригера в "лот. 1". Вихід тригера є виходом елемента затримки. В такому випадку СБТК буде працювати наступним чином. По появі напруги живлення в лічильники всіх комірок записуються відповідні (заздалегідь прораховані) числа, а генератори імпульсів починають подавати лічильникам імпульси однакової частоти. Числа вираховуються у такий спосіб, щоб стан переповнення у відповідного лічильника відбувався з затримкою, пропорційною номеру КД в лінії. Це трапиться, якщо взяти, наприклад, числа, вказані в табл. 1 для затримок Тзj, а напрямок лічби встановити зворотній. Імпульс переповнення лічильника встановлює тригер в "лот. 1", саме цей стан є сигналом для модулятора на перетворення "первинний параметр - ШІМ". 5 64916 Найбільш ефективна реалізація запропонованої корисної моделі виявляється з застосуванням мікроконтролерів і найкраще, якщо використати найменший і найпростіший з них, наприклад, PIC10F20X, що має тільки 6 зовнішніх виводів. Мікроконтролери РІС10F20X. Основне призначення найменшого з серії РІС мікроконтролера PIC10F20X (фіг.3) - заміна декількох логічних елементів, тому цей тип мікроконтролерів оснащений пам'яттю малого об'єму. Крім того, завдяки вбудованому компаратору, можна замінювати і аналогові компоненти. Сигнал з виходу цього компаратора може внутрішньо прочитуватися або подаватися на вхід таймера Timer0. Не дивлячись на скромні характеристики РІС10F, за допомогою його 512 програмних слів можна реалізувати ряд серйозних багатозадачних програм. 6 Основні характеристики РІС10F [5]: пам'ять програм на 256/512 слова, пам'ять даних на 16/24 байт; ядро 5Х; команди SLEEP, TRIS і OPTION; внутрішній осцилятор частоти 4 Мгц; можливість отримати Fosс/4; діапазон робочої напруги - 2,0….5,5 В; чотири виводи портів: три - входи/виходи; один - тільки вхід; тип входів - TTL; тип виходів - КМОП; входи TOCK1 і MCLR - з тригером Шмітта; три виводи з внутрішніми підтягуючими резисторами; компаратор з опорною напругою; таймер TMR0 і сторожовий таймер; корпус на 6/8 виводів. Таблиця 2 Об'єми пам'яті і наявність компаратора у представників РІС10F Тип PIC10F200 PIC10F202 PIC10F204 PIC10F206 Пам'ять програм, в словах 256 512 256 512 Пам'ять даних, байт 16 24 16 24 Об'єми пам'яті і наявність модуля компаратора вказані в табл. 2. Мікроконтролер РІС10F може працювати виключно на своєму внутрішньому осциляторі з частотою 4 Мгц. При цьому діапазон напруги живлення складає 2,0…5,5 В. Точність внутрішнього осцилятора цілком прийнятна. Як і у разі будьякого іншого мікроконтролера з внутрішнім RCосцилятором, в серії PIC10F використовується регістр OSCCAL, вже запрограмований Microchip. Значення коректування розміщується в команді MOVLW в останньому елементі пам'яті програм. При стиранні кристала і новому програмуванні ця інформація втрачається, якщо, звичайно, заздале Модуль компаратора є є гідь не поклопотатися про її збереження. Оскільки в даному випадку мова йде про флеш-пам'ять, ми дістаємо можливість самостійно встановлювати і коректувати значення регістра OSCCAL. Внутрішні стани і ядро 5Х. 5Х - це просте процесорне ядро, відоме по мікроконтролеру РІС16С54 і ін. Воно підтримує тільки 33 команди і не обробляє переривання. Завантаження регістрів TRIS і OPTION знову таки виконується за допомогою команд OPTION і TRIS. Безпосередній доступ неможливий. Для програмування важливим є розподіл розрядів в регістрі OPTION (табл. 3). Таблиця 3 Структура регістра OPTION у разі ядра 5Х Розряд Позначення Стан після скидання 7 /GPWU 1 6 /GPPU 1 5 T0CS 1 Також у разі ядра 5Х використовують внутрішні підтягуючі резистори і "пробудження" по зміні рівня сигналу на деякому виводі. Хоча подібні мікроконтролери РІС і не підтримують переривання, існує можливість переводити їх в енергозбережний "сплячий" режим з "пробудженням" по різних діях. Серед таких дій, що "будять", можна назвати: зміна рівня сигналу на деякому виводі; перемикання виводу компаратора; переповнення сторожового таймера. Переповнення таймера Timer0 до цього списку, природно, не відноситься. Для того, щоб Timer0 міг формувати переповнення, він повинен постійно 4 T0SE 1 3 PSA 1 2 PS2 1 1 PS1 1 0 PS0 1 працювати, проте, за визначенням, головний осцилятор в "сплячому" режимі відключений. Таким чином, таймер мав би бути забезпечений зовнішнім тактовим сигналом, але властивості ядра 5Х такі, що зовнішній такт для Timer0 теж не помічник. Іншими словами, переповнення Timer0 ніяк не може привести до виводу зі "сплячого" режиму. Виводи поодинці GP0. Якщо цей вивід включений як звичайний вхід, то він TTL-сумісний. Для живлячої напруги в діапазоні 4,5…5,5 В це означає, що напруга нижче 0,8 В розпізнається як низький рівень, а напруга 7 64916 вище 2 В - як високий, вихідний каскад - типу КМОП. При використанні GP0 в якості виходу може виникнути фальсифікація вихідного рівня в результаті перевантаження. Навантаження більше 10 мА приводить до підвищення вихідної напруги, відповідної низькому рівню, до значення вище 0,8 В. Оскільки такий рівень лежить в "забороненому" діапазоні, низький рівень на виводі, перемкнутому в стан входу, більш не може вважатися достовірним. У гіршому разі вихідний рівень підвищується до значення понад 2,0 В, що приводить до помилкового розпізнавання високого рівня. Отже, існує проблематика команд типу "читаннямодифікація-запис", якщо маються на увазі логічні або арифметичні операції., що реалізуються за допомогою таких команд як ADDWF, IORWF, BCF, BSF та ін. У всіх таких командах прочитується байт або порт, значення змінюється і потім знову записується. Нарешті, для виводу GP0 допускається програмування підтягуючого резистора, а також подача сигналу для виведення мікроконтролера зі "сплячого" стану. Якщо у разі внутрішньосхемного послідовного програмування вивід GP0 використовується як лінія ICSPDAT, то він приймає характеристики вхідного каскаду з тригером Шмітта. Якщо ж він використовується як вхід компаратора CIN+, тоді стає аналоговим входом. GP1. Для цього виводу справедливо все, що було сказане вище для виводу GP0, за тим виключенням, що у разі внутрішньосхемного послідовного програмування він виконує функції лінії ICSPCLK. Вхід компаратора, відповідний виводу GP1, називається CIN-. GP2. Вивід GP2 може працювати як звичайний вхід/вихід, проте без підтягуючого резистора і можливості "пробудження" мікроконтролера. Альтернативно цей вивід може служити як вхід для таймера TIMER0 (T0CKI). В цьому випадку він приймає характеристики вхідного каскаду з тригером Шмітта. Ще один варіант конфігурації виводу GP2 - вихід компаратора COUT (див. розряд COUTEN в регістрі CMCON0). І останній варіант використання - для видачі імпульсів з частотою, рівною однієї четвертої частоти системної синхронізації (Fosc/4). Див. розряд FOSC4 в регістрі OSCCAL. 8 GP3. Вивід GP3 не має вихідного каскаду і може працювати як звичайний вхід TTL. Подібно до виводів GP0 і GP1, GP3 оснащений підтягуючим резистором і допускає "пробудження" мікроконтролера зі "сплячого" стану по зміні рівня сигналу (див. розряди /GPWU і /GPPU в регістрі OPTION). Вибіркове включення підтягуючих резисторів неможливе: або всі (GPO, GP1 і GP3), або жоден. Це ж відноситься і до характеристик "пробудження". Другий спосіб використання виводу GP3 - як вхід /MCLR, за допомогою якого можна подати сигнал скидання, активний у разі низького рівня. У такій конфігурації вхід набуває характеристик тригера Шмітта, а підтягуючий резистор підключається автоматично. Вивід GP3 функціонує повністю незалежно від інших виводів, вхідна напруга на ньому не може перевищувати напруги живлення, інакше відбудеться перехід в режим програмування. Таким чином, ми підійшли до третього способу використання виводу GP3: якщо вивід GP3 використовується як вхід при програмуванні, на нього подається напруга програмування 13 В. Треба мати на увазі, що вхідна напруга не повинна перевитих вати рівня напруги живлення. Це, звичайно ж, відноситься до всіх виводів, а не тільки до GP3. Якщо і не відбудеться перемикання в режим програмування, то у будь-якому випадку почне протікати струм через захисні діоди, що у гіршому разі може привести до знаменитого тиристорного ефекту (latch-up effect), а це означає смерть мікроконтролера. Модуль компаратора. Модуль компаратора містить аналоговий компаратор і внутрішнє джерело опорної напруги. Аналогові входи мультиплексовані з виводами GP0 і GP1, а вихід компаратора може бути підключений на вивід GP2. Втім, це необов'язкова умова, оскільки результат роботи компаратора можна опитувати внутрішньо або подавати безпосередньо на вхід таймера TIMER0. Регістр CMCON0 (табл. 4), окрім розрядів настроювання різних опцій, містить також розряд, що має відношення до виходу компаратора. Розряд 7 (CMPOUT) відповідає виходу компаратора. Його можна опитати у будь-який момент. За допомогою розряду 6 (/COUTEN) вихід компаратора можна додатково з'єднати з виводом GP2, щоб видавати результат порівняння напруги в зовнішні модулі. Таблиця 4 Структура регістра CMCON0 Розряд 7 6 Позначення CMPOUT /COUTEN Стан після скидання 1 1 5 POL 1 Полярність виходу компаратора перемикається за допомогою розряду 5 (POL). Щодо розряду 4 (/CMPT0CS), мова йде про джерело тактового сигналу для таймера TIMER0. Якщо цей розряд містить 0, то вихід компаратора використовується безпосередньо як тактова лінія для TIMER0, якщо ж він містить 1, то джерело так 4 3 /CMPT0CS CMPON 1 1 2 CNREF 1 1 CPRBF 1 0 /CWU 1 тування таймера визначається за станом розряду T0CS в регістрі OPTION. Під номером 3 (CMPON) ховається "головний рубильник" компаратора. Якщо цей розряд містить 0, то модуль компаратора вимкнений. 9 За допомогою розряду 2 (CNREF) входу від'ємної напруги компаратора призначається опорна напруга або сигнал на виводі CIN-. За допомогою розряду 1 (CPREF) входу додатної напруги компаратора призначається сигнал на виводі CIN+ або CIN-. Якщо розряд 0 (/CWU) містить 0, то компаратор може виводити мікроконтролер РІС зі "сплячого" стану. Інакше він такої можливості не має. Використання PIC10F204 в комірці датчика Виходячи з таблиці 2, можна запропонувати використання в КД як PIC10F204, так і PIC10F206, оскільки обидва містять в собі компаратор. Решта контролерів PIC10F20X з цієї причини не придатні для використання. Розуміючи з логіки роботи КД, що витрати пам'яті очікуються мінімальними, з точки зору дешевизни доцільніше впроваджувати саме МК РІС 10F204. Отже, пропонується наступний алгоритм роботи PIC10F204 в КД: Сторожовий таймер ініціалізувати числом, пропорційним номеру комірки датчика в лінії; Перевести МК в "сплячий" режим по передньому фронті напруги живлення в лінії (можна задіяти команди CLRWDT або SLEEP, котрі обнуляють лічильник сторожового таймера і лічильник переддільника). Оскільки сторожовий таймер включений, то він обнуляється і починає відлік затримки. У регістрі STATUS скидається біт PD і встановлюється біт ТЕ. Тактовий генератор відключається. Виводи портів зберігають стан, який був безпосередньо перед виконанням команди SLEEP; Вивести МК зі "сплячого" стану по переповненню сторожового таймера (виконується автоматично); Встановити високий рівень напруги на виводі GP2 (для перемикання зовнішнього ключа і видачі початку відклику КД в лінію). Запускається перехідний процес в датчиковому ланцюжку і на вході компаратора; Встановити в регістрі CMCON0 розряд 6 (/COUTEN), щоб з'єднати вихід компаратора з ви 64916 10 водом GP2, видаючи результат порівняння напруги в зовнішні кола, і встановити розряд 5 (POL) для правильного формування кінця відклику КД в лінію (перехід від високого рівня напруги в низький). У такий спосіб на виводі GP2 сформується ШІМ-сигнал прямої полярності і через зовнішній ключ буде виданий струмовий відклик комірки датчика в лінію. Таким чином, аналогова схема комірки датчика, на основі експериментальних даних, має обмеження по кількості комірок в одній лінії до 32-х, за рахунок зростання нестабільності часу затримки. В запропонованому пристрої алгоритм використання мікроконтролера PIC10F204 (або PIC10F206) передбачає формування затримки цифровим методом і значно спрощує конструкцію КД. Джерела інформації: 1. Карначев А.С., Белошенко В.А., Титиевский В.И. Микролокальные сети: интеллектуальные датчики, однопроводный интерфейс, системы сбора информации. - Донецк: ДонФТИ НАН Украины, 2000. - 199 с. 2. А. с. № 1180950 СССР. Устройство для сбора информации / Митасов И.И. - Опубл. 23.09.85, Бюл. № 35, 3. Мітасов І.І. Діагностичні можливості таймерної моделі багатоточкового контролю виробничотехнологічних параметрів. Вісник Технологічного університету Поділля, м. Хмельницький, 2004, №2. ч. 1, т. 1, с.62-68. 4. Мітасов І.І. Квантовані марківські точкові процеси у біометрії та медичній діагностиці. Вісник Хмельницького національного університету, Хмельницький, 2005. - №4. част.1. - т.2. - С.181-187. 5. Мітасов І.І. Timing-моделирование в системах многоточечного контроля. Труды 8-й международной научно-практ. конф. "Современные информационные и электронные технологии", 21-25 мая 2007 г., Одесса, с.84. 6. www.microchip.com:PIC10F200/202/204/206 Data Sheet. 6-Pin, 8-Bit Flash Microcontrollers. 11 Комп’ютерна верстка Л. Ціхановська 64916 Підписне 12 Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюCell of indicator for collection of information
Автори англійськоюMitasov Ivan Isaeivych
Назва патенту російськоюЯчейка датчика для системы сбора информации
Автори російськоюМитасов Иван Исаевич
МПК / Мітки
МПК: G01R 22/00
Мітки: системі, інформації, комірка, датчика, збору
Код посилання
<a href="https://ua.patents.su/6-64916-komirka-datchika-dlya-sistemi-zboru-informaci.html" target="_blank" rel="follow" title="База патентів України">Комірка датчика для системи збору інформації</a>
Привід роботизованої системи для збору польової місцевизначеної інформації
Номер патенту: 27003
Опубліковано: 10.10.2007
Автор: Броварець Олександр Олександрович
МПК: B60K 1/00
Мітки: системі, роботизованої, привід, місцевизначеної, збору, інформації, польової
Формула / Реферат:
Привід роботизованої системи для збору польової місцевизначеної інформації, що містить раму, ведучий міст, встановлений з можливістю переміщення відносно рами, пружний елемент, ведучі колеса з півосями, з'єднані трансмісією відповідно з ротором та статором, який відрізняється тим, що кожне з ведучих коліс роботизованої системи містить реверсивний електродвигун, який приводить їх в рух через трансмісію, причому трансмісія виконана у вигляді...
Пристрій горизонтування з контролем датчика рідинного маятникового
Номер патенту: 31498
Опубліковано: 10.04.2008
Автор: Ніколенко Сергій Іванович
МПК: G05D 23/00
Мітки: маятникового, горизонтування, датчика, рідинного, контролем, пристрій
Формула / Реферат:
Пристрій горизонтування з контролем датчика рідинного маятникового, який містить датчик рідинний маятниковий, один вихід якого підключений до катода першого і до анода другого діодів, другий вихід підключений до катода третього і до анода четвертого діодів, анод першого і катод четвертого діодів з'єднані між собою і підключені до одного виводу першого резистора і до виходу пристрою горизонтування, катод другого й анод третього діодів з'єднані...
Спосіб гарантованої передачі інформації з пристрою збору інформації
Номер патенту: 39767
Опубліковано: 10.03.2009
Автор: Морозов Юрій Васильович
МПК: H04B 7/204, G08G 1/127
Мітки: пристрою, збору, передачі, спосіб, гарантованої, інформації
Формула / Реферат:
Спосіб гарантованої передачі інформації з пристрою збору інформації, який включає збір інформації та передачу її в реальному масштабі часу через систему стільникового зв'язку в інформаційно-аналітичний центр, де інформацію приймають, обробляють, зберігають, який відрізняється тим, що додатково використовують систему радіозв'язку з інформаційно-аналітичним центром у випадку відсутності покриття стільникового зв'язку, при відсутності обох видів...
Спосіб збору інформації від розосереджених об’єктів
Номер патенту: 50596
Опубліковано: 10.06.2010
Автори: Панаріна Ірина Валеріївна, Обод Іван Іванович, Литвиненко Ліна Сергіївна, Мироненко Ірина Геннадіївна
МПК: G08B 25/00
Мітки: збору, розосереджених, об'єктів, спосіб, інформації
Формула / Реферат:
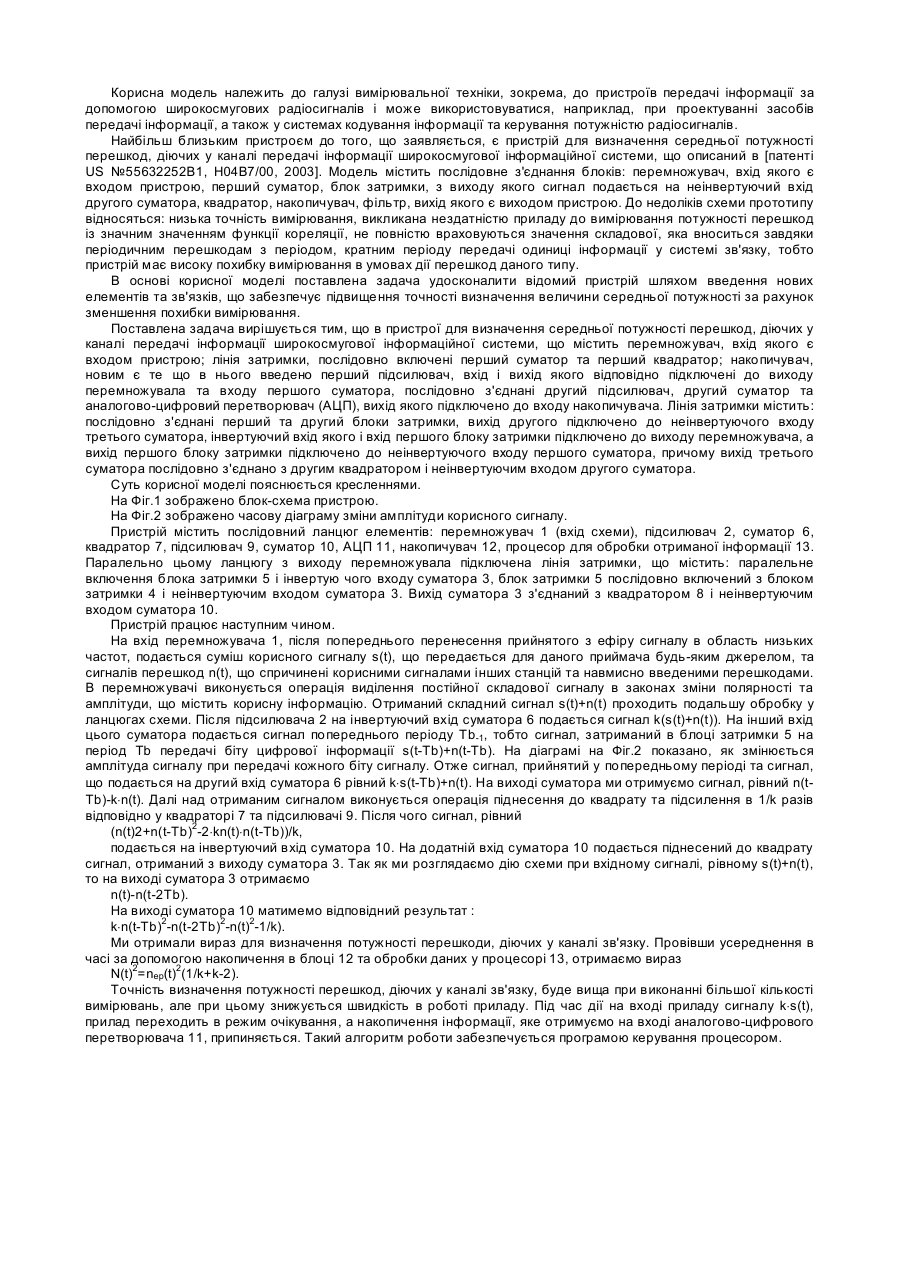
Спосіб збору інформації від розосереджених об'єктів, який полягає в тому, що синхронізують шкали часу розосереджених об'єктів, визначають часовий інтервал передачі інформації для кожного розосередженого об'єкта, випромінюють інформацію розосередженого об'єкта у визначений часовий інтервал, який відрізняється тим, що створюють єдину шкалу часу усієї системи збору інформації, на кожному розосередженому об'єкті визначають просторові координати,...
Пристрій для визначення середньої потужності перешкод, діючих у каналі передачі інформації широкосмугової інформаційної системи
Номер патенту: 21997
Опубліковано: 10.04.2007
Автори: Слесаренко Сергій Сергійович, Литвин Олександр Степанович, Кобак Микола Миколайович, Верещак Валерій Павлович
МПК: H04B 7/00
Мітки: потужності, інформаційної, інформації, каналі, середньої, широкосмугової, передачі, системі, перешкод, визначення, діючих, пристрій
Формула / Реферат:
Пристрій для визначення середньої потужності перешкод, діючих у каналі передачі інформації широкосмугової інформаційної системи, що містить перемножувач, вхід якого є входом пристрою, лінію затримки, послідовно включені перший суматор та перший квадратор, накопичувач, який відрізняється тим, що в нього введено перший підсилювач, вхід і вихід якого відповідно підключені до виходу перемножувача та входу першого суматора, послідовно з'єднані...
Попередній патент: Спосіб вирощування буркуну білого на засолених ґрунтах півдня україни
Наступний патент: Регульований електропривод змінного струму стаціонарних установок
Випадковий патент: Гібосекатор