Спосіб автоматичного управління потоково-транспортною лінією сипких матеріалів
Номер патенту: 66456
Опубліковано: 10.01.2012
Автори: Хобін Віктор Андрійович, Аннаев Батир Сейдуллаєвич, Веридусов Петро Олександрович, Степанов Михайло Тимофійович, Єрьомін Максим Анатолійович, Тимофєєв Олексій Олександрович, Герасімов Валерій Володимирович, Шестопалов Станіслав Володимирович, Кір'язов Іван Миколайович

Формула / Реферат
Спосіб автоматичного управління потоково-транспортною лінією сипких матеріалів, що передбачає технологічний пуск лінії, в ході якого здійснюють послідовний, проти ходу сипкого матеріалу, із затримками за часом, пуск всіх конвеєрів перед початком його транспортування, технологічний зупинник лінії, в ході якого здійснюють послідовний, по ходу сипкого матеріалу, із затримками за часом, зупинник всіх конвеєрів для закінчення його транспортування, контроль виникнення аварійної ситуації в роботі кожного з конвеєрів, пов'язаної з перегрівом їх електродвигунів, аварійний зупинник лінії, в ході якого здійснюють аварійний зупинник того з конвеєрів лінії, електродвигун якого перегрітий, і одночасний аварійний зупинник всіх попередніх йому конвеєрів, який відрізняється тим, що додатково визначають за тепловими математичними моделями електродвигунів інтервали часу, що безперервно змінюються, від поточного моменту до моментів перегріву та аварійного відключення кожного з електродвигунів, порівнюють значення цих інтервалів часу з величиною суми затримок за часом, які установлені на відключення кожного конвеєра і всіх попередніх йому конвеєрів в режимі технологічного зупинника, і у випадку, якщо хоча б для одного з конвеєрів, інтервал часу, що залишився до моменту його аварійної зупинки, стає рівним або меншим відповідної суми цих затримок, здійснюють технологічний зупинник лінії.
Текст
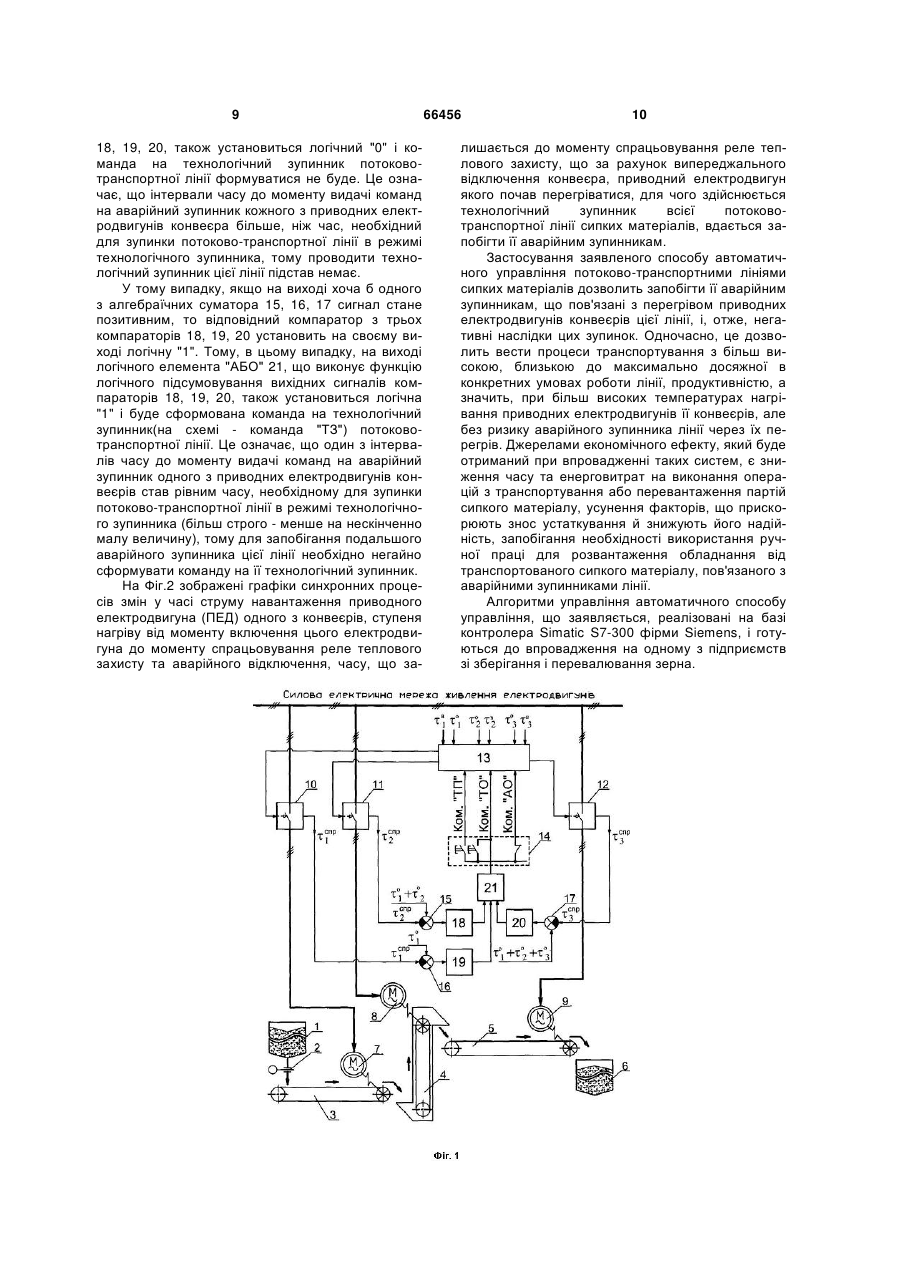
Спосіб автоматичного управління потоковотранспортною лінією сипких матеріалів, що передбачає технологічний пуск лінії, в ході якого здійснюють послідовний, проти ходу сипкого матеріалу, із затримками за часом, пуск всіх конвеєрів перед початком його транспортування, технологічний зупинник лінії, в ході якого здійснюють послідовний, по ходу сипкого матеріалу, із затримками за U 1 ПОТОКОВО-ТРАНСПОРТНОЮ 66456 УПРАВЛІННЯ (11) АВТОМАТИЧНОГО UA (54) СПОСІБ МАТЕРІАЛІВ видається під відповідальність власника патенту ОПИС (19) ДЕРЖАВНА СЛУЖБА ІНТЕЛЕКТУАЛЬНОЇ ВЛАСНОСТІ УКРАЇНИ 3 и электропривода направление низковольтной коммутационной техники. - D-90327 Нюрнберг, Заказной №: 3UF7970-0AA01-0, издание 10/2005, 494с, с.64, с.67-70). Цей спосіб передбачає автономне (незалежне) автоматичне керування електродвигуном кожного конвеєра лінії окремо і запобігає інтенсивному тепловому старінню і руйнуванню (пробою) електричної ізоляції обмоток цих електродвигунів, яке виникає у разі їх перегрівання. Загальною причиною перегріву електродвигунів є безперервне або періодичне перевищення споживаним струмом навантаження його номінального значення, і, як наслідок, підвищене, пропорційне квадрату значення цього струму, виділення тепла, при протіканні струму по обмотках електродвигуна. Для приводних електродвигунів конвеєрів, причинами їх роботи при підвищеному струмі навантаження є перевантаження їх робочих органів сипучим матеріалом, підвищений опір переміщенню цих робочих органів Із-за зносу і погіршення змащення механічних передач, робота електродвигунів при зниженій напрузі живильної мережі. Зазначений спосіб управління має такі недоліки. 1. Вимкнення електродвигуна при значеннях струму його навантаження більше номінального значення викликає великі перенапруги на обмотках статора і на силових контактах його комутаційного апарата (контактора). У першому випадку, воно викликає мікропробої ізоляції обмоток двигуна, що збільшує швидкість усіх видів старіння, зменшуючи термін служби до пробою, а в другому - інтенсивний знос або вигорання контактів через дуговий розряд, що виникає між ними. 2. Відключення одного з приводних електродвигунів послідовно включених конвеєрів поточнотранспортної лінії призводить до утворення завалу з транспортованого сипкого матеріалу на конвеєрі, який передує аварійно зупиненому. Розміри завалу будуть пропорційні часу роботи подавальних конвеєрів після аварійного відключення приймального конвеєра, а сам завал доведеться ліквідувати вручну. Важливо, що наступний пуск всієї потоково-транспортної лінії можливий тільки після очищення робочих органів конвеєрів від транспортованого сипкого матеріалу і охолодження відключеного приводного електродвигуна, причому до такої міри, щоб при його новому включенні пускові струми, які можуть перевищувати номінальні в 5-8 разів, не призвели б його до нового перегріву і нового аварійного відключення. Аварійні відключення знижують надійність і терміни служби електродвигунів та їх контакторів, знижують продуктивність лінії транспортування сипучих матеріалів, збільшують час виконання транспортної операції та витрати ручної низькокваліфікованої праці на ліквідацію наслідків аварійного відключення. Найбільш близьким до корисної моделі, що заявляється, є спосіб автоматичного управління потоково-транспортною лінією сипких матеріалів, що запобігає завалам сипкого матеріалу на її конвеєрах (див. Э.В.Трибельгорн. Методы синтеза и анализа систем автоматизации хлебоприемных и зерноперерабатывающих предприятий:- М.: Колос, 66456 4 1971.-248с., с.107-108). Цей спосіб передбачає зблоковане (взаємозалежне) автоматичне керування конвеєрами. Суть цього блокування полягає в наступному. При технологічному пуску лінії в роботу, тобто перед початком транспортування сипкого матеріалу, здійснюється послідовний, проти ходу сипкого матеріалу, з необхідними затримками за часом, пуск конвеєрів. Затримки за часом при такому пуску необхідні для розвантаження робочих органів конвеєрів від сипкого матеріалу, який міг залишитися після завершення попереднього транспортування, а також для підтвердження того, що конвеєр працює в штатному режимі і аварійних ситуацій з ним не виникає. Час таких затримок приблизно дорівнює часу одного повного циклу переміщення робочого органа кожного конвеєра. При технологічному зупиннику лінії, тобто в ході процесу закінчення транспортування сипкого матеріалу, здійснюється послідовний, по ходу сипкого матеріалу, з необхідними затримками за часом, зупинник конвеєрів. Затримки за часом при такому зупиннику необхідні для розвантаження робочих органів конвеєрів від сипкого матеріалу. Час таких затримок повинен бути не менше часу половини одного повного циклу переміщення робочого органа кожного конвеєра. При аварійному зупиннику лінії, який реалізується в разі виникнення аварійної ситуації в роботі одного з конвеєрів, здійснюється аварійний зупинник цього конвеєра, і одночасний, без затримок за часом, аварійний зупинник всіх попередніх йому конвеєрів. При цьому одним із варіантів аварійної ситуації в роботі конвеєра, розглядається ситуація, пов'язана з перегрівом його приводного електродвигуна. Даний спосіб вибраний як прототип корисної моделі, що заявляється. Прототип і спосіб, що заявляється, мають такі спільні операції: - технологічний пуск лінії, в ході якого здійснюють послідовний, проти ходу сипкого матеріалу, з затримками за часом, пуск всіх конвеєрів перед початком його транспортування; - технологічний зупинник лінії, в ході якого здійснюється послідовний, по ходу сипкого матеріалу, із затримками за часом, зупинник всіх конвеєрів для закінчення його транспортування; - контроль виникнення аварійної ситуації в роботі кожного з конвеєрів, пов'язаної з перегрівом їх приводних електродвигунів; - аварійний зупинник лінії, в ході якого здійснюється аварійний зупинник того з конвеєрів лінії, електродвигун якого перегрітий, і одночасний аварійний зупинник всіх попередніх йому конвеєрів. Недоліком прототипу є необхідність аварійних відключень всіх конвеєрів при перегріві приводного електродвигуна одного з них. Оскільки такі відключення відбуваються при значеннях струмів навантаження приводних електродвигунів більше їх номінальних струмів, то виникають при цьому перенапруги на обмотках статора електродвигуна і на силових контактах його комутаційного апарата (контактора). Це призводить до мікропробоїв ізоляції обмоток двигуна, що збільшує швидкість усіх видів її старіння, зменшуючи термін служби до 5 пробою та інтенсивний знос або вигорання контактів із-за дугового розряду, що виникає, між ними. І, хоча зблоковане управління електроприводами конвеєрів дозволяє запобігти завалам сипкого матеріалу на вході конвеєра, в роботі якого виникла аварійна ситуація, але робочі органи всіх аварійно зупинених конвеєрів залишаються заповненими транспортуючим сипким матеріалом. Повторний пуск цих конвеєрів, безпечний по перегріву їх електродвигунів в процесі пуску, потребує часу на очищення робочих органів та охолодження електродвигунів. Аварійні відключення знижують надійність і терміни служби електродвигунів та їх контакторів, знижують продуктивність лінії транспортування сипких матеріалів, збільшують час виконання транспортної операції та витрати ручної низькокваліфікованої праці на ліквідацію наслідків аварійного відключення. В основу корисної моделі поставлено задачу розробити удосконалений спосіб автоматичного управління потоково-транспортною лінією сипких матеріалів, в якому шляхом здійснення додаткових операцій, таких як визначення, за тепловими математичними моделями електродвигунів конвеєрів інтервалів часу, що безперервно змінюються від поточного моменту до моменту перегріву та аварійного відключення кожного з електродвигунів, порівняння значень цих інтервалів часу з величиною суми затримок за часом та ін., забезпечити запобігання аварійних відключень конвеєрів потоково-транспортної лінії сипких матеріалів, пов'язаних з перегрівом приводних електродвигунів конвеєрів, І, як наслідок, підвищити надійність і терміни служби цих приводних електродвигунів та їх комутаційної апаратури, запобігти необхідності очищення робочих органів конвеєрів від транспортованого сипкого матеріалу, підвищити продуктивність потоково-транспортної лінії. Поставлена задача вирішена в способі автоматичного управління потоково-транспортною лінією сипких матеріалів, що передбачає технологічний пуск лінії, в ході якого здійснюють послідовний, проти ходу сипкого матеріалу, із затримками за часом, пуск всіх конвеєрів перед початком його транспортування, технологічний зупинник лінії, в ході якого здійснюють послідовний, по ходу сипкого матеріалу, із затримками за часом, зупинник всіх конвеєрів для закінчення його транспортування, контроль виникнення аварійної ситуації в роботі кожного з конвеєрів, пов'язаної з перегрівом їх електродвигунів, аварійний зупинник лінії, в ході якого здійснюють аварійний зупинник того з конвеєрів лінії, електродвигун якого перегрітий, і одночасний аварійний зупинник всіх попередніх йому конвеєрів, тим, що додатково визначають за тепловими математичними моделями електродвигунів інтервали часу, що безперервно змінюються, від поточного моменту до моментів перегріву та аварійного відключення кожного з електродвигунів, порівнюють значення цих інтервалів часу з величиною суми затримок за часом, які установлені на відключення кожного конвеєра і всіх попередніх йому конвеєрів в режимі технологічного зупинника, і у випадку, якщо хоча б для одного з конвеєрів, інтервал часу, що залишився 66456 6 до моменту його аварійної зупинки, стає рівним або меншим відповідної суми цих затримок, здійснюють технологічний зупинник лінії. Необхідність такого рішення поставленої задачі пояснюється наступним. Запобігти аварійному зупиннику потоковотранспортної лінії сипких матеріалів, в ході якого здійснюється аварійний зупинник того з конвеєрів лінії, електродвигун якого перегрітий, і одночасний аварійний зупинник всіх попередніх йому конвеєрів, можливо у разі недопущення перегріву цього електродвигуна. У заявленому способі недопущення перегріву здійснюється за рахунок випереджального відключення конвеєра, приводний електродвигун якого почав перегріватися, для чого здійснюється технологічний зупинник всієї потоково-транспортної лінії сипких матеріалів. У ході технологічного зупинника лінії здійснюється послідовний, по ходу сипкого матеріалу, із затримками за часом, зупинник всіх конвеєрів, який запобігає виникненню завалів сипкого матеріалу і забезпечує очищення робочих органів конвеєрів від цього матеріалу, а значить готовність всіх конвеєрів до подальшого технологічного пуску лінії. Важливо, щоб момент часу для видачі команди на такий технологічний зупинник лінії був би максимально обґрунтований. Можливі два варіанти необґрунтованого часу видачі такої команди: затримка і передчасна видача команди. Затримка команди на технологічний зупинник лінії не дасть можливість усім конвеєрам завершити розвантаження своїх робочих органів і підготуватися до відключення. Тому, фактично, зупинка конвеєрів з не розвантаженими робочими органами буде проводитися в режимі аварійної зупинки, і мати ті негативні наслідки, які описані вище. Передчасна команда на технологічний зупинник лінії означає, що лінія пропрацювала без зупинки менше часу, ніж могла б. Така різниця в часі, яка завжди незрівнянно менше повного часу роботи лінії для виконання операції транспортування, не знизить ефективність її роботи за умови, що така команда виявилася обґрунтованою. Але, важливо, що обґрунтованість передчасної команди на технологічний зупинник лінії має імовірнісний характер, тобто така команда може виявитися, рівною мірою як обґрунтованою, так і необґрунтованою. Це пов'язано з тим, що подача сипкого матеріалу на потоково-транспортну лінію проводиться нерівномірно. Така нерівномірність призводить до того, що струм навантаження і, отже, ступінь нагріву приводних електродвигунів будуть мати коливальні складові випадкового характеру. Тому команда на технологічний зупинник буде обґрунтованою тільки в тому випадку, якщо підвищене навантаження на конвеєр продовжувало б зберігатися. В іншому випадку така команда буде не обґрунтованою, причому необхідність в такій команді при подальшій роботі лінії може взагалі не виникнути. Тому необґрунтований зупинник лінії знизить ефективність її роботи, в порівнянні з тим яка вона могла б бути без такого зупинника. Для максимальної обґрунтованості зупинника лінії необхідно видавати відповідну команду в гранично пізній момент часу, коли ще можливо повні 7 стю реалізувати її технологічний зупинник. Очевидно, що такий момент часу визначається місцем розміщення конвеєра з приводним електродвигуном, що перегрівається, в потоково-транспортній лінії, а саме кількістю попередніх йому конвеєрів і необхідними (установленими) часом затримки для розвантаження від транспортованого сипкого матеріалу кожного з цих конвеєрів і конвеєра з приводним електродвигуном, що перегрівається. Тому, для видачі обґрунтованої команди на зупинення лінії, вимірюють або обчислюють за тепловими моделями електродвигунів конвеєрів інтервали часу, що безперервно змінюються, від його поточного моменту до моментів перегріву та аварійного відключення кожного з електродвигунів, порівнюють значення цих інтервалів часу з величиною суми затримок за часом, які установлені на відключення кожного конвеєра і всіх попередніх йому конвеєрів в режимі технологічного зупинника, і у випадку, якщо хоча б для одного з конвеєрів, інтервал часу, що залишився до моменту його аварійної зупинки, стає рівним або меншим відповідної суми цих затримок, здійснюють технологічний зупинник лінії. Заявлений спосіб пояснюється кресленням і графіками, де: Фіг.1 - схема одного з варіантів системи автоматичного управління для здійснення способу, що заявляється; фіг.2 - графіки, які ілюструють синхронні процеси змін у часі струму навантаження приводного електродвигуна конвеєра, ступеня його нагрівання від моменту включення електродвигуна до моменту спрацьовування реле теплового захисту, часу, що залишається до моменту спрацьовування реле теплового захисту. Варіант системи автоматичного управління, що складається з трьох конвеєрів, представлений на схемі (див. Фіг.1). На схемі показані наступні елементи: витратний бункер сипкого матеріалу 1, підбункерна засувка 2, конвеєри 3, 4, 5, приймальний бункер сипкого матеріалу 6, приводні електродвигуни 7, 8, 9, контролери управління електродвигунами 10, 11, 12, контролер автоматичного управління потоковотранспортною лінією сипких матеріалів 13, органи і ланцюги формування команд, які задають режим управління 14, алгебраїчні суматори 15, 16, 17, компаратори 18, 19, 20, логічний елемент АБО 21. Спосіб реалізується наступним чином. Сипкий матеріал з витратного бункера 1 через підбункерну засувку 2 подається на послідовно включені конвеєри 3, 4, 5, які перевантажують його в приймальний бункер 6. Робочі органи конвеєрів 3, 4, 5 приводяться в дію приводними електродвигунами 7, 8, 9, які отримують живлення від силової електричної мережі, підключення до якої здійснюється через контролери управління електродвигунами 10, 11, 12. За такі контролери, в розглянутому варіанті реалізації способу, застосовані контролери, які реалізують функції комутації силових ланцюгів електродвигунів, теплового захисту їх від перегріву, з виведенням з контролера команди на аварійну зупинку двигуна через перегрів і значення часу, що залишається до видачі цієї 66456 8 команди та ін., наприклад SIMOCODE pro. Команди на включення і відключення всіх приводних електродвигунів 7, 8, 9 контролери управління електродвигунами 10, 11, 12 отримують безпосередньо від контролера автоматичного управління потоково-транспортною лінією сипких матеріалів 13. Він формує послідовність цих команд у відповідності з реалізованим у поточний момент часу одним з можливих варіантів (режимів) управління, а саме "технологічний пуск" (на схемі - команда "ТП"), "технологічний зупинник" (на схемі - команда "ТЗ"), "аварійний зупинник" (на схемі - команда "A3"). Час видачі цих команд враховує задані значення затримок за часом на включення конвеєрів, O 1 , , 3 і на їх відключення - 1 , O, O . 2 3 2 Задання контролера автоматичного управління потоково-транспортною лінією сипких матеріалів 13 конкретного режиму управління здійснюється органами і ланцюгами формування команд, які задають режим управління 14. До них належать кнопки, за допомогою яких оператор потоковотранспортної лінії сипких матеріалів може ініціювати реалізацію режимів управління "технологічний пуск" і "технологічний зупинник", блок-контакти пускачів (контролерів управління) приводних електродвигунів конвеєрів, контакти реле теплового захисту, за допомогою яких формуються команда "аварійний зупинник" потоково-транспортної лінії. Таких контактів в реальній схемі управління багато, їх кількість пропорційна кількості конвеєрів у лінії, на Фіг.1 вони показані умовно. Описана вище частина варіанта реалізації способу автоматичного управління поточно-транспортної лінії сипких матеріалів одночасно є описом варіанта реалізації прототипу способу, що заявляється. Для реалізації способу, що заявляється, додатково, з відповідного виходу кожного контролера управління електродвигунами 10, 11, 12 вимірюють (зчитують) значення інтервалів часу СПР 1 , СПР, СПР г СПР * СПР г СПР тобто інтервалів 2 3 часу, що залишаються до видачі команд на аварійний зупинник приводних електродвигунів, відповідно, 7, 8, 9 Із-за їх перегріву. На алгебраїчних суматорах 15, 16, 17 значення цих інтервалів часу СПР 1 - для приводного електродвигуна першого конвеєра, СПР - для приводного електродвигуна 2 другого конвеєра, СПР - для приводного елект3 родвигуна третього конвеєра, порівнюють з інтервалами часу, необхідними для зупинки лінії в технологічному режимі при перегріві відповідного O електродвигуна, відповідно зі значеннями 1 , O для першого конвеєра, 1 O, - для другого кон2 O веєра і 1 O O - для третього конвеєра. 2 3 Якщо результати порівняння всіх інтервалів часу для кожного з приводних електродвигунів конвеєра дають негативний результат, то компараторами 18, 19, 20 на своїх виходах буде установлений логічний "0". Тому на виході логічного елемента "АБО" 21, що виконує функцію логічного підсумовування вихідних сигналів компараторів 9 18, 19, 20, також установиться логічний "0" і команда на технологічний зупинник потоковотранспортної лінії формуватися не буде. Це означає, що інтервали часу до моменту видачі команд на аварійний зупинник кожного з приводних електродвигунів конвеєра більше, ніж час, необхідний для зупинки потоково-транспортної лінії в режимі технологічного зупинника, тому проводити технологічний зупинник цієї лінії підстав немає. У тому випадку, якщо на виході хоча б одного з алгебраїчних суматора 15, 16, 17 сигнал стане позитивним, то відповідний компаратор з трьох компараторів 18, 19, 20 установить на своєму виході логічну "1". Тому, в цьому випадку, на виході логічного елемента "АБО" 21, що виконує функцію логічного підсумовування вихідних сигналів компараторів 18, 19, 20, також установиться логічна "1" і буде сформована команда на технологічний зупинник(на схемі - команда "ТЗ") потоковотранспортної лінії. Це означає, що один з інтервалів часу до моменту видачі команд на аварійний зупинник одного з приводних електродвигунів конвеєрів став рівним часу, необхідному для зупинки потоково-транспортної лінії в режимі технологічного зупинника (більш строго - менше на нескінченно малу величину), тому для запобігання подальшого аварійного зупинника цієї лінії необхідно негайно сформувати команду на її технологічний зупинник. На Фіг.2 зображені графіки синхронних процесів змін у часі струму навантаження приводного електродвигуна (ПЕД) одного з конвеєрів, ступеня нагріву від моменту включення цього електродвигуна до моменту спрацьовування реле теплового захисту та аварійного відключення, часу, що за 66456 10 лишається до моменту спрацьовування реле теплового захисту, що за рахунок випереджального відключення конвеєра, приводний електродвигун якого почав перегріватися, для чого здійснюється технологічний зупинник всієї потоковотранспортної лінії сипких матеріалів, вдається запобігти її аварійним зупинникам. Застосування заявленого способу автоматичного управління потоково-транспортними лініями сипких матеріалів дозволить запобігти її аварійним зупинникам, що пов'язані з перегрівом приводних електродвигунів конвеєрів цієї лінії, і, отже, негативні наслідки цих зупинок. Одночасно, це дозволить вести процеси транспортування з більш високою, близькою до максимально досяжної в конкретних умовах роботи лінії, продуктивністю, а значить, при більш високих температурах нагрівання приводних електродвигунів її конвеєрів, але без ризику аварійного зупинника лінії через їх перегрів. Джерелами економічного ефекту, який буде отриманий при впровадженні таких систем, є зниження часу та енерговитрат на виконання операцій з транспортування або перевантаження партій сипкого матеріалу, усунення факторів, що прискорюють знос устаткування й знижують його надійність, запобігання необхідності використання ручної праці для розвантаження обладнання від транспортованого сипкого матеріалу, пов'язаного з аварійними зупинниками лінії. Алгоритми управління автоматичного способу управління, що заявляється, реалізовані на базі контролера Simatic S7-300 фірми Siemens, і готуються до впровадження на одному з підприємств зі зберігання і перевалювання зерна. 11 Комп’ютерна верстка Н. Лисенко 66456 Підписне 12 Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of automatic control of continuous-handling line of bulk materials
Автори англійськоюAnnaev Batyr Seidullaievych, Herasimov Valerii Volodymyrovych, Khobin Viktor Andriiovych, Kiriazov Ivan Mykolaiovych, Shestopalov Stanislav Volodymyrovych, Yeriomin Maksym Anatoliiovych, Verydusov Petro Oleksandrovych, Tymofieiev Oleksii Oleksandrovych, Stepanov Mykhailo Tymofiiovych
Назва патенту російськоюСпособ автоматического управления поточно-транспортной линией сыпучих материалов
Автори російськоюАннаев Батыр Сейдуллаевич, Герасимов Валерий Владимирович, Хобин Виктор Андреевич, Кирьязов Иван Николаевич, Шестопалов Станислав Владимирович, Еремин Максим Анатольевич, Веридусов Петр Александрович, Тимофеев Алексей Александрович, Степанов Михаил Тимофеевич
МПК / Мітки
МПК: B65G 17/00
Мітки: лінією, сипких, автоматичного, управління, матеріалів, спосіб, потоково-транспортною
Код посилання
<a href="https://ua.patents.su/6-66456-sposib-avtomatichnogo-upravlinnya-potokovo-transportnoyu-liniehyu-sipkikh-materialiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб автоматичного управління потоково-транспортною лінією сипких матеріалів</a>
Спосіб автоматичного управління завантаженням потоково-транспортної лінії сипких матеріалів
Номер патенту: 95887
Опубліковано: 12.09.2011
Автори: Єрьомін Максим Анатолійович, Хобін Віктор Андрійович, Веридусов Петро Олександрович, Шестопалов Станіслав Володимирович, Кір'язов Іван Миколайович, Аннаев Батир Сейдуллаєвич, Степанов Михайло Тимофійович, Герасімов Валерій Володимирович, Тимофєєв Олексій Олександрович
МПК: B65G 65/42, B65G 47/46, G01G 11/12, B65G 17/00
Мітки: сипких, потоково-транспортної, лінії, управління, автоматичного, спосіб, завантаженням, матеріалів
Формула / Реферат:
1. Спосіб автоматичного управління завантаженням потоково-транспортної лінії сипких матеріалів, що передбачає вимірювання навантаження приводного електродвигуна норії, порівняння виміряної величини із заданим значенням навантаження приводного електродвигуна норії для конкретного виду сипкого матеріалу і, у разі їх невідповідності, зміну продуктивності розвантажувального пристрою бункера до досягнення рівності виміряного і заданого значень...
Спосіб автоматичного керування завантаженням потоково-транспортної лінії сипких матеріалів
Номер патенту: 34335
Опубліковано: 11.08.2008
Автори: Андріященко Георгій Володимирвоич, Хобін Віктор Андрійович
МПК: B65G 17/00
Мітки: керування, потоково-транспортної, матеріалів, лінії, завантаженням, спосіб, автоматичного, сипких
Формула / Реферат:
Спосіб автоматичного керування завантаженням потоково-транспортної лінії сипких матеріалів, що вимірює навантаження приводного електродвигуна норії, який відрізняється тим, що зміряне значення навантаження приводного електродвигуна норії порівнюють із заданим значенням навантаження, для конкретного виду сипкого матеріалу, і у разі їх невідповідності, продуктивність розвантажувального пристрою бункера змінюють для досягнення їх рівності.
Спосіб автоматичного керування завантаженням потоково-транспортної лінії сипких матеріалів

Номер патенту: 57903
Опубліковано: 10.03.2011
Автори: Шестопалов Станіслав Володимирович, Степанов Михайло Тимофійович, Веридусов Петро Олександрович, Герасімов Валерій Володимирович, Єрьомін Максим Анатолійович, Хобін Віктор Андрійович, Кір'язов Іван Миколайович, Аннаев Батир Сейдуллаєвич, Тимофєєв Олексій Олександрович
МПК: B65G 17/00
Мітки: лінії, матеріалів, керування, потоково-транспортної, спосіб, автоматичного, завантаженням, сипких
Формула / Реферат:
1. Спосіб автоматичного керування завантаженням потоково-транспортної лінії сипких матеріалів, що передбачає вимірювання навантаження привідного електродвигуна норії, порівняння виміряної величини із заданим значенням навантаження привідного електродвигуна норії для конкретного виду сипкого матеріалу і, у разі їх невідповідності, зміну продуктивності розвантажувального пристрою бункера до досягнення рівності виміряного і заданого значень...
Спосіб автоматичного вимірювання рівня сипких матеріалів
Номер патенту: 24382
Опубліковано: 17.07.1998
Автори: Носов Григорій Романович, Коротков Микола Борисович, Ващенко Сергій Борисович, Ващенко Борис Іванович
МПК: E04H 7/00, G01F 23/28
Мітки: рівня, автоматичного, вимірювання, спосіб, сипких, матеріалів
Формула / Реферат:
Спосіб автоматичного вимірювання рівня сипких матеріалів, що вимірює довжину незасипаної частини струни, який відрізняється тим, що струну збуджують механічним імпульсом, фіксують момент часу збудження, сприймають відбитий імпульс, фіксують момент часу повернення відбитого імпульсу, вимірюють різницю зафіксованих моментів часу, перетворюють одержану різницю часу в результуючий рівень засипки шляхом множення на постійний коефіцієнт.
Пристрій для автоматичного дозування сипких матеріалів із бункера
Номер патенту: 63195
Опубліковано: 26.09.2011
Автори: Іщенко Андрій Васильович, Буряковський Віталій Миколайович
МПК: G01F 11/00
Мітки: сипких, бункера, автоматичного, пристрій, матеріалів, дозування
Формула / Реферат:
1. Пристрій автоматичного дозування сипкого матеріалу із бункера, з спонукачем витрати матеріалу, що містить живильник з електроприводом, задатчик видачі матеріалу, блок управління, з'єднаний з електроприводом живильника і датчиком витрати матеріалу, який відрізняється тим, що в пристрій введені блок індикації, електронний годинник і клавіатура, з'єднані з блоком управління, а задатчик видачі матеріалу виконаний у вигляді блока прийому...
Попередній патент: Спосіб ідентифікації моторних олив
Наступний патент: Спосіб визначення забрудненості змащувальних олив
Випадковий патент: Стент, що розгортається (варіанти)