Самохідний транспортний засіб


Формула / Реферат
Самохідний транспортний засіб, який містить раму, ходові мотор-колеса та систему управління мотор-колесами, який відрізняється тим, що на рамі закріплені в фіксованому напрямку мотор-колеса, які розташовані між собою під кутом відносно вертикальних площин суміжних коліс, кожне з яких складається з несучих дисків, по периметру яких розташовані порівну і рівномірно симетрично зрізані n роликів з радіусом овалів в площині осі обертання ролика, що дорівнює радіусу колеса і довжиною дуги не меншою 1/n довжини окружності колеса, а осі обертання овальних роликів розташовані в площині відповідних несучих дисків, які механічно зв'язані між собою віссю колеса і знаходяться один від одного вздовж осі колеса на відстані без торкання овальних роликів між собою і одночасно зміщених відносно один одного навколо осі колеса на половину кута між суміжними парами овальних роликів, котрі розташовані на однаковій відстані від осі колеса і сполучаючись, відтворюють безперервну поверхню керованого кочення колеса.
Текст
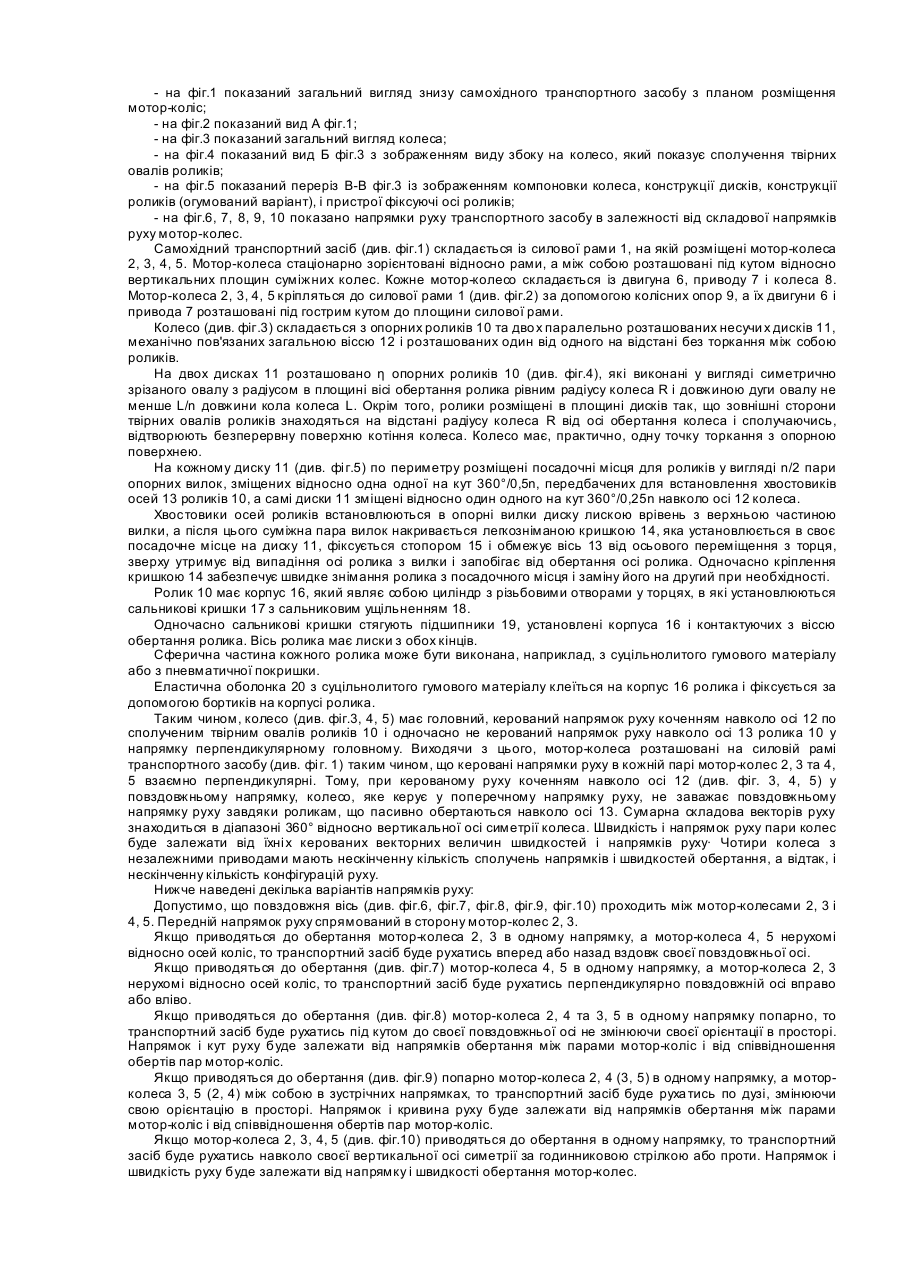
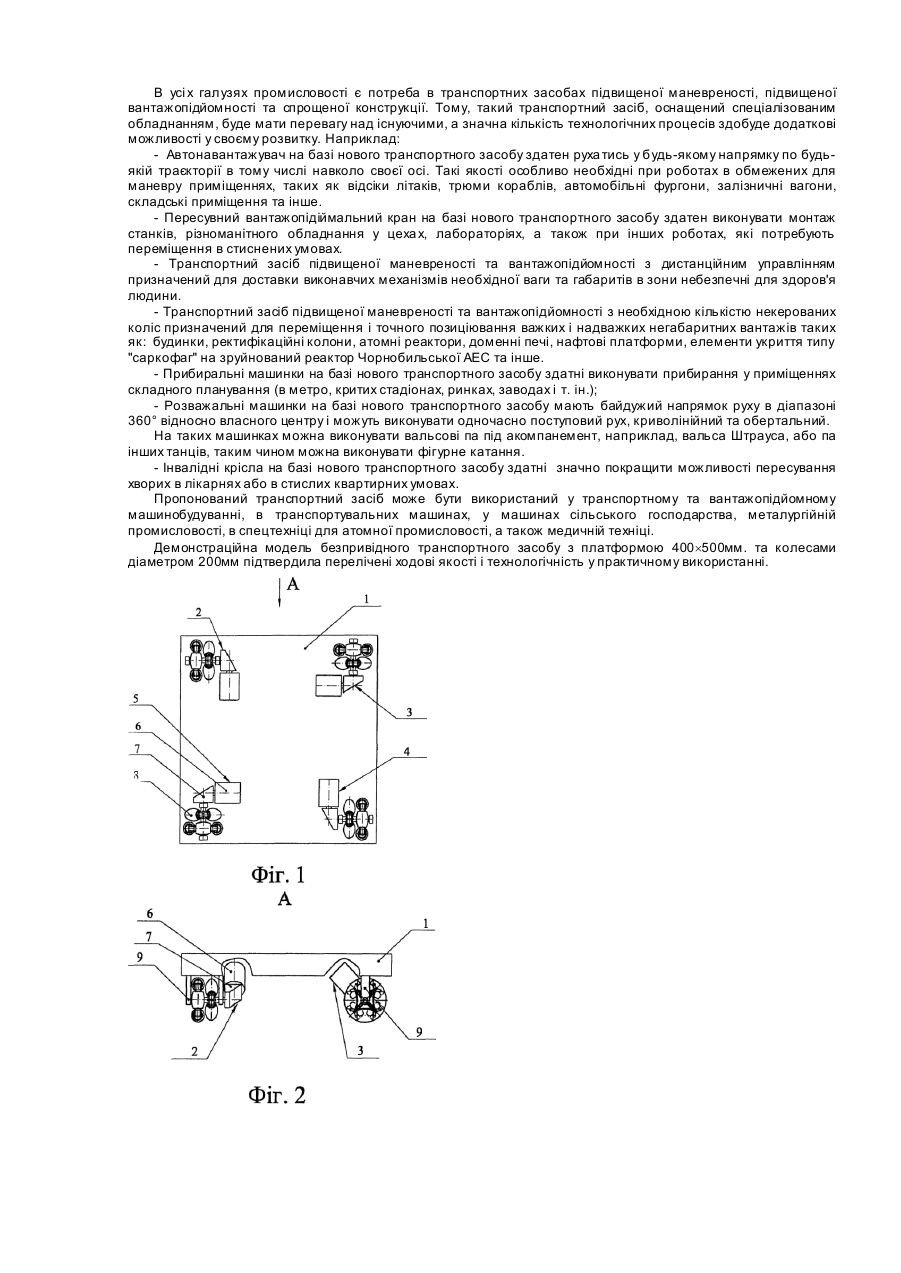
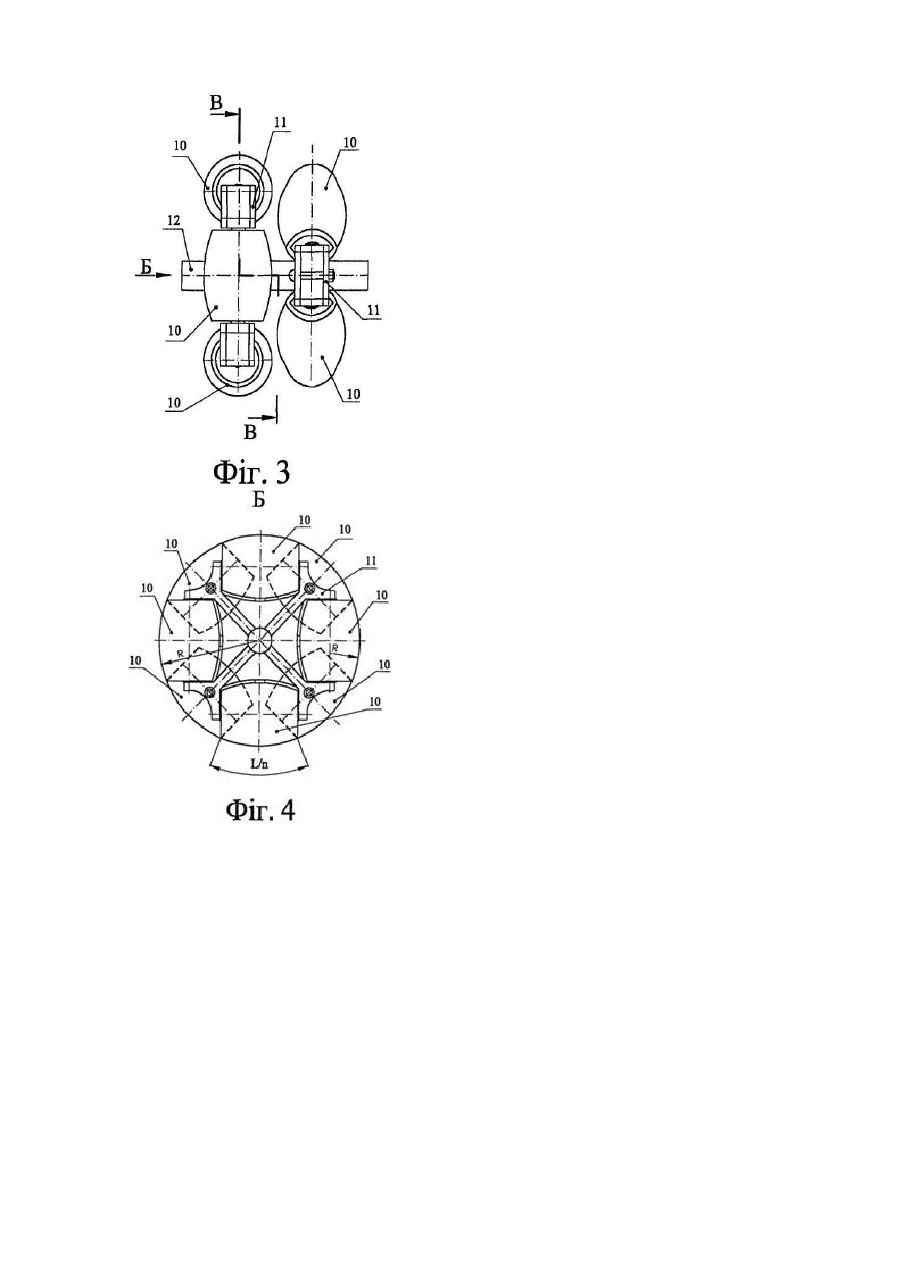
Винахід відноситься до транспортних засобів широкого діапазону застосування: автомобільний транспорт, платформи для перевезення вантажів різноманітних габаритів та ваги, навантажувально-розвантажувальні агрегати для виконання робіт на малих виробничих площах, транспорт оснащений агрегатами для комунальних робіт, транспортування роботів в умовах, де заборонена присутність людини на робочому місці, забезпечення мобільності різноманітного апаратного устаткування за рахунок вільного переміщення, самохідні зверхманеврові крісла для хворих, розважальні атракціони та інше. Відомий транспортний засіб (Авторське свідоцтво СРСР №876493 кл. В62Д63/00 1980p.), який забезпечує переміщення у будь-якому напрямку за рахунок мотор-колес, до складу котрих входить колесний рушій виконаний у вигляді полусфери. Полусферичний колесний рушій у складі мотор-колеса обертається навколо своєї осі з постійною швидкістю, забезпечуючи рух транспортного засобу. Обертання мотор-колеса площиною зрізу овалу колесного рушія навколо вертикальної осі забезпечує зміну напрямку руху. Обертання моторколеса площиною зрізу овалу колесного рушія навколо горизонтальної осі забезпечує зміну швидкості. Недоліком такого транспортного засобу є втрати на холостому ході, складність конструкції колесного рушія, що тягне за собою зниження надійності, обмеженість вантажопідйомності, не зручність обслуговування в процесі експлуатації. Ближче усіх до запропонованої конструкції самохідного транспортного засобу знаходиться відомий транспортний засіб (Авторське свідоцтво СРСР №1368222 кл. В62Д63/02 1986p.), який забезпечує переміщення у будь-якому напрямку за рахунок мотор-колес закріплених до рами за допомогою шарнирів з вертикальною віссю обертання. Мотор-колесо складається із хрестовини, у якій на одній із осей з обох кінців встановлено по два опорних диски з власними електроприводами. Недоліком такого самохідного транспортного засобу є велика кількість виконавчих елементів в системі управління мотор-колесами. Задачею винаходу є спрощення конструкції мотор-колеса, спрощення системи управління і як наслідок, підвищення надійності, поліпшення умов експлуатації і розширення експлуатаційних можливостей транспортного засобу. Задача вирішується за рахунок того, що в самохідному транспортному засобі ходові мотор-колеса, до складу яких входить колесо з двома ступенями свободи руху коченням (далі колесо), стаціонарно зорієнтовані відносно рами, а між собою розташовані під кутом одне до одного відносно вертикальних площин суміжних колес і здатні рухатись у будь-якому напрямку. Колесо складається з несучих дисків механічно пов'язаних віссю колеса, по периметру яких розташовані порівну і рівномірно симетрично зрізані ролики з радіусом овалів рівним радіусу колеса. Осі обертання овальних роликів розташовані в площині відповідних несучи х дисків, які знаходяться один від одного вздовж осі колеса на відстані без торкання овальних роликів. Одночасно несучі диски зміщені відносно один одного навколо осі колеса на половину кута між суміжними парами овальних роликів, котрі розташовані на однаковій відстані від осі колеса і сполучаючись відтворюють безперервну поверхню кочення колеса. Така конструкція колеса є закінченим у функціональному значенні вузлом і може використовува тись автономно або в складі мотор-колеса. Головний, керованій напрямок руху мотор-колеса, це кочення навколо осі колеса. Одночасно колесо може котитись не керовано навколо осі ролика у напрямку перпендикулярному основному. Тому, при використанні двох мотор-колес, у яких вектори керованих напрямків руху розташовані під кутом один до одного, буде одержано керований напрямок руху в діапазоні 360° відносно вертикальної осі симетрії пари мотор-колес. Швидкість і напрямок руху пари колес буде залежати від їх керованих векторних величин швидкостей і напрямків руху. Таким чином, транспортний засіб оснащений такими мотор-колесами, для стійкості не менше трьох колес, не потребує механічного рульового управління. Крім того, можна встановлювати необхідну кількість пасивних колес для підвищення вантажопідйомності. Через те, що кожне колесо має тільки одну опорну точку і може котитись одночасно навколо осі колеса і уздовж осі колеса, це забезпечує їм умови копіру на опорній поверхні будь-якого профілю, а завдяки тому що їх осі механічно не зв'язані між собою, це дозволяє виконувати рух коченням у будь-якому напрямку, по будь-якій траєкторії не змінюючи орієнтації колеса відносно транспортного засобу під час маневру. Новизною технічного рішення в конструкції самохідного транспортного засобу є: - введення в склад мотор-колеса, колеса з двома ступенями свободи руху коченням; - встановлення на рамі транспортного засобу мотор-колес в фіксованому напрямку; - розташування мотор-колес під кутом відносно вертикальних площин суміжних колес; Винахідницький рівень технічного рішення виявляється в тому, що запропонований транспортний засіб має властивості: - переміщуватись плавним коченням по опорній поверхні довільного профілю як уздовж повздовжньої осі транспортного засобу, так і поперек, а також під будь-яким кутом і у будь-якому напрямку і по будь-якій траєкторії без зміненя орієнтації мотор-колес відносно транспортного засобу під час маневру; - має краще щеплення з слабонесучим ґрунтом і підвищену прохідність за рахунок дворядного розташування роликів на колесі, що забезпечує утворення плям відбитків роликів у ша ховому порядку; - має підвищену надійність за рахунок значного спрощення ходової частини і рульового управління транспортного засобу; - має кращу несучу характеристику завдяки можливості використовувати допоміжні пасивні колеса без рульового управління в залежності від навантаження; - управління одночасно напрямком і швидкістю руху двигунами мотор-колес. Таким чином, задача, яка до теперішнього часу до кінця не була вирішена (див. прототип Авторське свідоцтво СРСР №1368222 кл. В62Д63/02 1986p.), завдяки переліченим новим технічним якостям ходової частини, робить можливим застосування на практиці принципово нового виду самохідного транспортного засобу. Винахід пояснюється нижченаведеним описом і доданими до нього кресленнями, де: - на фіг.1 показаний загальний вигляд знизу самохідного транспортного засобу з планом розміщення мотор-коліс; - на фіг.2 показаний вид А фіг.1; - на фіг.3 показаний загальний вигляд колеса; - на фіг.4 показаний вид Б фіг.3 з зображенням виду збоку на колесо, який показує сполучення твірних овалів роликів; - на фіг.5 показаний переріз В-В фіг.3 із зображенням компоновки колеса, конструкції дисків, конструкції роликів (огумований варіант), і пристрої фіксуючі осі роликів; - на фіг.6, 7, 8, 9, 10 показано напрямки руху транспортного засобу в залежності від складової напрямків руху мотор-колес. Самохідний транспортний засіб (див. фіг.1) складається із силової рами 1, на якій розміщені мотор-колеса 2, 3, 4, 5. Мотор-колеса стаціонарно зорієнтовані відносно рами, а між собою розташовані під кутом відносно вертикальних площин суміжних колес. Кожне мотор-колесо складається із двигуна 6, приводу 7 і колеса 8. Мотор-колеса 2, 3, 4, 5 кріпляться до силової рами 1 (див. фіг.2) за допомогою колісних опор 9, а їх двигуни 6 і привода 7 розташовані під гострим кутом до площини силової рами. Колесо (див. фіг.3) складається з опорних роликів 10 та дво х паралельно розташованих несучи х дисків 11, механічно пов'язаних загальною віссю 12 і розташованих один від одного на відстані без торкання між собою роликів. На двох дисках 11 розташовано η опорних роликів 10 (див. фіг.4), які виконані у вигляді симетрично зрізаного овалу з радіусом в площині вісі обертання ролика рівним радіусу колеса R і довжиною дуги овалу не менше L/n довжини кола колеса L. Окрім того, ролики розміщені в площині дисків так, що зовнішні сторони твірних овалів роликів знаходяться на відстані радіусу колеса R від осі обертання колеса і сполучаючись, відтворюють безперервну поверхню котіння колеса. Колесо має, практично, одну точку торкання з опорною поверхнею. На кожному диску 11 (див. фі г.5) по периметру розміщені посадочні місця для роликів у вигляді n/2 пари опорних вилок, зміщених відносно одна одної на кут 360°/0,5n, передбачених для встановлення хвостовиків осей 13 роликів 10, а самі диски 11 зміщені відносно один одного на кут 360°/0,25n навколо осі 12 колеса. Хвостовики осей роликів встановлюються в опорні вилки диску лискою врівень з верхньою частиною вилки, а після цього суміжна пара вилок накривається легкозніманою кришкою 14, яка установлюється в своє посадочне місце на диску 11, фіксується стопором 15 і обмежує вісь 13 від осьового переміщення з торця, зверху утримує від випадіння осі ролика з вилки і запобігає від обертання осі ролика. Одночасно кріплення кришкою 14 забезпечує швидке знімання ролика з посадочного місця і заміну його на другий при необхідності. Ролик 10 має корпус 16, який являє собою циліндр з різьбовими отворами у торцях, в які установлюються сальникові кришки 17 з сальниковим ущільненням 18. Одночасно сальникові кришки стягують підшипники 19, установлені корпуса 16 і контактуючих з віссю обертання ролика. Вісь ролика має лиски з обох кінців. Сферична частина кожного ролика може бути виконана, наприклад, з суцільнолитого гумового матеріалу або з пневматичної покришки. Еластична оболонка 20 з суцільнолитого гумового матеріалу клеїться на корпус 16 ролика і фіксується за допомогою бортиків на корпусі ролика. Таким чином, колесо (див. фіг.3, 4, 5) має головний, керований напрямок руху коченням навколо осі 12 по сполученим твірним овалів роликів 10 і одночасно не керований напрямок руху навколо осі 13 ролика 10 у напрямку перпендикулярному головному. Виходячи з цього, мотор-колеса розташовані на силовій рамі транспортного засобу (див. фі г. 1) таким чином, що керовані напрямки руху в кожній парі мотор-колес 2, 3 та 4, 5 взаємно перпендикулярні. Тому, при керованому руху коченням навколо осі 12 (див. фіг. 3, 4, 5) у повздовжньому напрямку, колесо, яке керує у поперечному напрямку руху, не заважає повздовжньому напрямку руху завдяки роликам, що пасивно обертаються навколо осі 13. Сумарна складова векторів руху знаходиться в діапазоні 360° відносно вертикальної осі симетрії колеса. Швидкість і напрямок руху пари колес буде залежати від їхні х керованих векторних величин швидкостей і напрямків руху· Чотири колеса з незалежними приводами мають нескінченну кількість сполучень напрямків і швидкостей обертання, а відтак, і нескінченну кількість конфігурацій руху. Нижче наведені декілька варіантів напрямків руху: Допустимо, що повздовжня вісь (див. фіг.6, фіг.7, фіг.8, фіг.9, фіг.10) проходить між мотор-колесами 2, 3 і 4, 5. Передній напрямок руху спрямований в сторону мотор-колес 2, 3. Якщо приводяться до обертання мотор-колеса 2, 3 в одному напрямку, а мотор-колеса 4, 5 нерухомі відносно осей коліс, то транспортний засіб буде рухатись вперед або назад вздовж своєї повздовжньої осі. Якщо приводяться до обертання (див. фіг.7) мотор-колеса 4, 5 в одному напрямку, а мотор-колеса 2, 3 нерухомі відносно осей коліс, то транспортний засіб буде рухатись перпендикулярно повздовжній осі вправо або вліво. Якщо приводяться до обертання (див. фіг.8) мотор-колеса 2, 4 та 3, 5 в одному напрямку попарно, то транспортний засіб буде рухатись під кутом до своєї повздовжньої осі не змінюючи своєї орієнтації в просторі. Напрямок і кут руху буде залежати від напрямків обертання між парами мотор-коліс і від співвідношення обертів пар мотор-коліс. Якщо приводяться до обертання (див. фіг.9) попарно мотор-колеса 2, 4 (3, 5) в одному напрямку, а моторколеса 3, 5 (2, 4) між собою в зустрічних напрямках, то транспортний засіб буде руха тись по дузі, змінюючи свою орієнтацію в просторі. Напрямок і кривина руху буде залежати від напрямків обертання між парами мотор-коліс і від співвідношення обертів пар мотор-коліс. Якщо мотор-колеса 2, 3, 4, 5 (див. фіг.10) приводяться до обертання в одному напрямку, то транспортний засіб буде рухатись навколо своєї вертикальної осі симетрії за годинниковою стрілкою або проти. Напрямок і швидкість руху буде залежати від напрямку і швидкості обертання мотор-колес. В усі х галузях промисловості є потреба в транспортних засобах підвищеної маневреності, підвищеної вантажопідйомності та спрощеної конструкції. Тому, такий транспортний засіб, оснащений спеціалізованим обладнанням, буде мати перевагу над існуючими, а значна кількість технологічних процесів здобуде додаткові можливості у своєму розвитку. Наприклад: - Автонавантажувач на базі нового транспортного засобу здатен руха тись у будь-якому напрямку по будьякій траєкторії в тому числі навколо своєї осі. Такі якості особливо необхідні при роботах в обмежених для маневру приміщеннях, таких як відсіки літаків, трюми кораблів, автомобільні фургони, залізничні вагони, складські приміщення та інше. - Пересувний вантажопідіймальний кран на базі нового транспортного засобу здатен виконувати монтаж станків, різноманітного обладнання у цеха х, лабораторіях, а також при інших роботах, які потребують переміщення в стиснених умовах. - Транспортний засіб підвищеної маневреності та вантажопідйомності з дистанційним управлінням призначений для доставки виконавчих механізмів необхідної ваги та габаритів в зони небезпечні для здоров'я людини. - Транспортний засіб підвищеної маневреності та вантажопідйомності з необхідною кількістю некерованих коліс призначений для переміщення і точного позиціювання важких і надважких негабаритних вантажів таких як: будинки, ректифікаційні колони, атомні реактори, доменні печі, нафтові платформи, елементи укриття типу "саркофаг" на зруйнований реактор Чорнобильської АЕС та інше. - Прибиральні машинки на базі нового транспортного засобу здатні виконувати прибирання у приміщеннях складного планування (в метро, критих стадіонах, ринках, заводах і т. ін.); - Розважальні машинки на базі нового транспортного засобу мають байдужий напрямок руху в діапазоні 360° відносно власного центру і можуть виконувати одночасно поступовий рух, криволінійний та обертальний. На таких машинках можна виконувати вальсові па під акомпанемент, наприклад, вальса Штрауса, або па інших танців, таким чином можна виконувати фігурне катання. - Інвалідні крісла на базі нового транспортного засобу здатні значно покращити можливості пересування хворих в лікарнях або в стислих квартирних умовах. Пропонований транспортний засіб може бути використаний у транспортному та вантажопідйомному машинобудуванні, в транспортувальних машинах, у машинах сільського господарства, металургійній промисловості, в спецтехніці для атомної промисловості, а також медичній техніці. Демонстраційна модель безпривідного транспортного засобу з платформою 400´500мм. та колесами діаметром 200мм підтвердила перелічені ходові якості і технологічність у практичному використанні.
ДивитисяДодаткова інформація
Назва патенту англійськоюSelf-propelled vehicle
Автори англійськоюDorozhko Oleksandr Ivanovych
Назва патенту російськоюСамоходное транспортное средство
Автори російськоюДорожко Александр Иванович
МПК / Мітки
МПК: B62D 63/00
Мітки: засіб, транспортний, самохідний
Код посилання
<a href="https://ua.patents.su/6-69611-samokhidnijj-transportnijj-zasib.html" target="_blank" rel="follow" title="База патентів України">Самохідний транспортний засіб</a>
Самохідний тягово-транспортний засіб
Номер патенту: 42107
Опубліковано: 15.10.2001
Автори: Луб'яний Микола Миколаєвич, Байбіков Володимир Юрійович, Ілляшенко Володимир Іванович, Мартиненко Микола Іванович, Карташов Сергій Григорович
МПК: B62D 7/06
Мітки: засіб, тягово-транспортний, самохідний
Формула / Реферат:
1. Самохідний тягово-транспортний засіб, що має раму, на якій встановлені двигун та трансмісія, передні та задні мости з колесами і бортові редуктори, який відрізняється тим, що бортові редуктори виконані одноступінчастими та коливально-рухомими відносно осі підвісу, а одна із точок підвісу виконана у вигляді керованого гідроциліндру.2. Самохідний тягово-транспортний засіб за п. 1, який відрізняється тим, що рама з'єднана з...
Транспортний засіб

Номер патенту: 25237
Опубліковано: 30.10.1998
Автор: Конончук Дмитро Володимирович
Мітки: транспортний, засіб
Формула / Реферат:
Транспортний засіб, що містить раму із колесами, рулем та сідлом, а також приводом переміщення у вигляді педалей, пов'язаних ланцюгом із зірочкою приводної втулки, який відрізняється тим, що привід переміщення додатково споряджено накопичувачем енергії у вигляді плоскої пружини кручення, що поміщена в корпус та пов'язана через зубчасту передачу й муфту вмикання із зірочкою приводної втулки, а на рамі встановлено важіль управління, пов'язаний...
Транспортний засіб, рама транспортного засобу, м’язовий привід

Номер патенту: 38133
Опубліковано: 15.05.2001
Автор: Хребтань Геннадій Анатолійович
МПК: B62K 17/00, B62K 19/00, B62M 1/00
Мітки: м'язовий, транспортний, рама, засобу, транспортного, засіб, привід
Формула / Реферат:
1. Транспортний засіб, до складу якого входять рама, поворотне та неповоротне колесо(а), сидіння, опора для рук та м'язовий привод ножним та/або ручним хитаючимися "догори-вниз' або "вперед-назад" важелями із можливістю їх автономної або синхронної роботи, із механізмом вільного ходу і гнучкою та/або жорсткою прямою або і проміжною предачою на вісь ведучого колеса, який відрізняється тим, що вісь повороту важеля приводу, що...
Транспортний засіб з мускульним приводом
Номер патенту: 51021
Опубліковано: 15.11.2002
Автор: Вакуленко Валентин Олександрович
МПК: B62M 1/00
Мітки: транспортний, приводом, засіб, мускульним
Формула / Реферат:
Транспортний засіб з мускульним приводом, який складається з рами та сидіння, руля, двох вилок з колесами, шестірні з обгінною муфтою на одному з них та храпового приводу з зірочкою , шатунами та педалями, який відрізняється тим, що вісь приводу встановлена на підшипниках, зірочка та храповики жорстко закріплені на осі, шатуни мають підшипники та заскочки з пружинами, зірочка кінематично зв’язана з шестірнею, яка встановлена на...
Наземний транспортний засіб для перевезення пасажирів

Номер патенту: 34795
Опубліковано: 15.03.2001
Автори: Гусєв Олександр Володимирович, Павлюк Дмитро Олександрович
МПК: B60R 21/34
Мітки: транспортний, перевезення, наземний, засіб, пасажирів
Формула / Реферат:
Наземний транспортний засіб для перевезення пасажирів, який містить двигун, шасі, трансмісію, кузов, ходову частину, механізми керування рухом, гальмову систему і двері, який відрізняється тим, що на протилежному від дверей для висадки пасажирів боці наземного транспортного засобу для перевезення пасажирів встановлено нарощувач габаритної довжини, а наземний транспортний засіб для перевезення пасажирів обладнано механізмом керування...
Попередній патент: Вібраційний конвеєр
Наступний патент: Пристрій для інтенсивної ферментації органічної маси
Випадковий патент: Елемент для запобігання появі надмірного тиску в суперконденсаторі