Спосіб гідродинамічного захисту насосної установки та пристрій для його реалізації
Номер патенту: 71355
Опубліковано: 15.11.2004
Автори: Коренькова Тетяна Валеріївна, Михайличенко Дмитро Анатолійович, Родькін Дмитро Йосипович
Формула / Реферат
1. Спосіб гідродинамічного захисту насосної установки, що включає насосний агрегат з асинхронним електродвигуном, перетворювач, датчики тиску і витрати на виході турбомеханізму, що полягає в контролі і керуванні параметрами насосного агрегата шляхом впливу на швидкість обертання електродвигуна насоса, який відрізняється тим, що додатково включає датчики потужності, швидкості та температури, які вимірюють потужність, споживану насосом, швидкість обертання електродвигуна турбомеханізму, температуру рідини, обчислюють різницю поточної ![]() і стандартної
і стандартної ![]() температури робочого потоку, що перекачується,
температури робочого потоку, що перекачується, ![]() визначають розрахункове значення щільності рідини при зміні температури
визначають розрахункове значення щільності рідини при зміні температури ![]() з урахуванням щільності
з урахуванням щільності ![]() потоку, що відповідає стандартній температурі, і коефіцієнта температурного розширення
потоку, що відповідає стандартній температурі, і коефіцієнта температурного розширення ![]() робочого середовища, що перекачується; обчислюють потужність неробочого ходу
робочого середовища, що перекачується; обчислюють потужність неробочого ходу ![]() насоса у формі добутку куба відносної швидкості обертання двигуна насоса, апроксимаційного конструктивного коефіцієнта турбомеханізму і відносної щільності рідини, що перекачується; вимірюють напір
насоса у формі добутку куба відносної швидкості обертання двигуна насоса, апроксимаційного конструктивного коефіцієнта турбомеханізму і відносної щільності рідини, що перекачується; вимірюють напір ![]() та продуктивність
та продуктивність ![]() на виході турбомеханізму, визначають похідні по напору
на виході турбомеханізму, визначають похідні по напору ![]() і продуктивності
і продуктивності ![]() в момент часу
в момент часу ![]() при виникненні перевантаження по напору, коли
при виникненні перевантаження по напору, коли ![]() чи зниженні продуктивності, коли
чи зниженні продуктивності, коли ![]() обчислюють час досягнення на виході насоса максимально допустимої величини напору
обчислюють час досягнення на виході насоса максимально допустимої величини напору  та мінімально допустимої величини подачі
та мінімально допустимої величини подачі  після закінчення якого формується сигнал у систему керування перетворювачем для зміни швидкості обертання вала електродвигуна насоса; при подальшому зниженні продуктивності в гідромережі до нуля, коли
після закінчення якого формується сигнал у систему керування перетворювачем для зміни швидкості обертання вала електродвигуна насоса; при подальшому зниженні продуктивності в гідромережі до нуля, коли ![]() та рівності потужності, споживаної насосним агрегатом, потужності неробочого ходу
та рівності потужності, споживаної насосним агрегатом, потужності неробочого ходу ![]() формується сигнал на виконавчий механізм для закриття зворотного клапана насоса.
формується сигнал на виконавчий механізм для закриття зворотного клапана насоса.
2. Пристрій, що реалізує спосіб гідродинамічного захисту насосної установки, що містить насосний агрегат з асинхронним електродвигуном, перетворювач, датчики тиску і витрати на виході турбомеханізму, який відрізняється тим, що він оснащений датчиком потужності, вихід якого підключений до статорних затискачів асинхронного електродвигуна, а вхід з'єднаний з виходами перетворювача, вхід якого з'єднаний із промисловою енергомережею через вимикач; датчиком швидкості, який розташований на одному валу з електричним двигуном, датчиком температури рідини, що перекачується, який установлений на вході робочого колеса насоса; першим і другим задатчиками конструктивного коефіцієнта насоса і щільності робочого середовища, що відповідає стандартній температурі рідини, блоком визначення потужності неробочого ходу, суматором; причому перший, другий, третій і четвертий входи блока визначення потужності неробочого ходу насоса зв'язані з відповідними виходами першого і другого задатчиків, датчиків швидкості і температури, а вихід підключений до першого входу суматора, другий вхід якого зв'язаний з датчиком споживаної потужності насоса; першим і другим обчислювальними пристроями, третім і четвертим задатчиками максимально допустимої величини напору і мінімально допустимої величини продуктивності, програмно-керуючим пристроєм, причому виходи датчиків тиску і витрати зв'язані з першими входами першого і другого обчислювальних блоків, до других входів яких підключені виходи з третього і четвертого задатчиків; виходи першого і другого обчислювальних блоків з'єднані з першим і другим входами програмно-керуючого пристрою, третій вхід якого підключений до виходу суматора; перший вихід програмно-керуючого пристрою з'єднаний з керуючим входом перетворювача, другий вихід зв'язаний з виконавчим механізмом зворотного клапана на виході насоса.
Текст
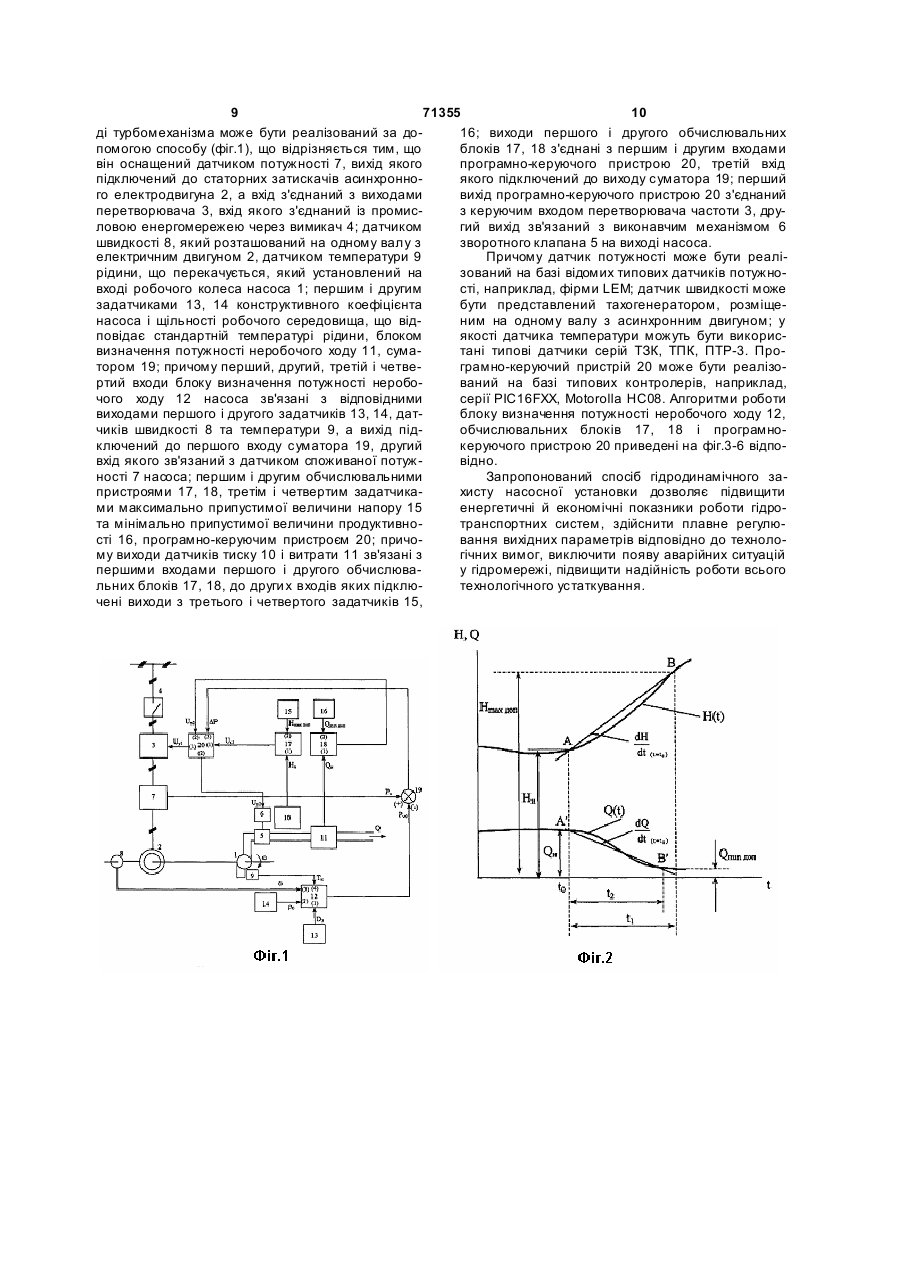
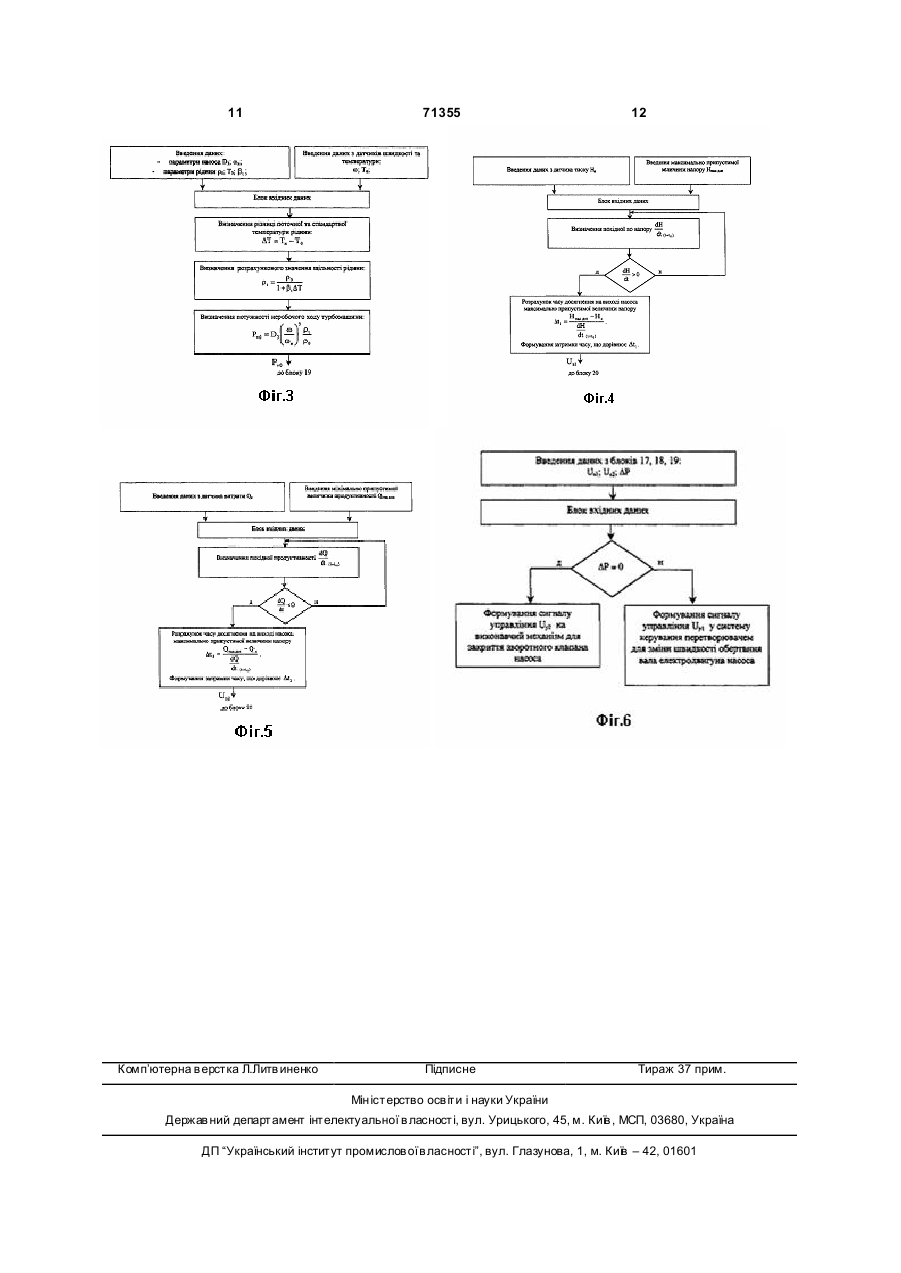
1. Спосіб гідродинамічного захисту насосної установки, що включає насосний агрегат з асинхронним електродвигуном, перетворювач, датчики тиску і витрати на ви ході турбомеханізму, що полягає в контролі і керуванні параметрами насосного агрегата шляхом впливу на швидкість обертання електродвигуна насоса, який відрізняється тим, що додатково включає датчики потужності, швидкості та температури, які вимірюють потужність, споживану насосом, швидкість обертання електродвигуна турбомеханізму, температуру рідини, обчислюють різницю поточної Tи і стандар 3 71355 4 строями, третім і четвертим задатчиками максилювальних блоків з'єднані з першим і другим вхомально допустимої величини напору і мінімально дами програмно-керуючого пристрою, третій вхід допустимої величини продуктивності, програмноякого підключений до виходу суматора; перший керуючим пристроєм, причому виходи датчиків вихід програмно-керуючого пристрою з'єднаний з тиску і ви трати зв'язані з першими входами першокеруючим входом перетворювача, другий вихід го і другого обчислювальних блоків, до других зв'язаний з виконавчим механізмом зворотного входів яких підключені виходи з третього і четверклапана на виході насоса. того задатчиків; виходи першого і другого обчис Винахід відноситься до електротехніки і може бути використаний в системах автоматичного регулювання, контролю і захисту насосних агрегатів систем комунального та промислового водопостачання, водовідливних установок, насосних станцій нафтових, вугільних, хімічних галузей. Гідротранспортні системи відносяться до класу одних з найбільш енергоємних об'єктів, де основними споживачами електроенергії є насосні установки (НУ). Через перемінний характер роботи споживача режими функціонування насосних агрегатів (НА) необхідно змінювати. Найбільш часте регулювання вихідних параметрів НУ здійснюється включенням, вимиканням додаткових турбомеханізмів чи дроселюванням напору засувкою, яка розташована на напірному патрубку насоса. До недоліків такого регулювання відносяться наявність втрат енергії на створення зайвих напорів у мережі, непродуктивних втрат потужності на дроселюючому органі, різке зменшення ККД турбомашини, а також зниження надійності роботи всього технологічного устатк ування. Регулювання подачі НУ зміною швидкості обертання вала двигуна турбомеханізма з використанням перетворювача частоти відноситься до більш енергетично вигідного методу, що забезпечує плавність регулювання вихідних параметрів, незначну зміну ККД насоса (у межах 5% вниз від максимальної величини), підвищення надійності та терміну служби устатк ування. Однак, при швидкій зміні витрати збоку споживачів, регулюванні вихідних параметрів НУ, зворотних стр умах, що виникають на вході і виході з робочого колеса на режимах малих подач, через скупчення повітря в насосі і трубопроводі, при механічному і гідравлічному дебалансі робочого колеса насоса, зносі турбомеханізма, можлива поява процесів (підвищені пульсації тиску, помпаж, кавітація), що приводять до нестійкої роботи устаткування, зниження ККД насосних агрегатів, збільшення осьового і радіального зусиль, діючих на робоче колесо, що викликає зсув і бій вала насосів, вібрацію і розбалансування устаткування й ін. У зв'язку з цим є доцільним розробка пристроїв і систем для регулювання чи обмеження вихідних параметрів НУ, формування гідродинамічного захисту НУ шляхом керування як параметрами НА, так і параметрами гідромережі, що дозволить запобігти можливі аварійні ситуації, зв'язані з неприпустимим перевищенням тиску чи зниженням продуктивності до нуля на виході гідромашини; відслідковувати порив у тр убопроводі чи його непрохідність, викликану закриттям клапанів, заму люванням; здійснювати контроль параметрів електродвигуна і турбомеханізма в процесі експлуатації; виключити зони нестійкої роботи гідросистеми, що, у кінцевому рахунку, підвищить ефективність функціонування всього технологічного комплексу. Відомий спосіб автоматичного контролю і захисту насосної станції [АС СРСР №2959604/25-06, кл. F04D15/00, 07.04.1982р., Бюл. №13], де датчиками тиску вимірюється поточне значення тиску на виході колектору, обчислюється еталонне значення споживаної потужності справними насосами, що працюють на справний трубопровід, яке порівнюється з реальною потужністю, що вимірюється безпосередньо датчиками споживаної потужності насосних агрегатів. У результаті формуються різні логічні комбінації, які несуть інформацію про номер насосу та його робоче становище. Паралельно датчиками тиску, що розміщені на виході підпірних насосів, вимірюється поточне значення підпору на входа х основних насосів, що порівнюється з заданою величиною тиску. У результаті формуються логічні комбінації, які відповідають поточному становищу в роботі насосної станції. Сформовані логічні комбінації надходять до блоку діагностики, де реалізовано алгоритм, який відображає всілякі ситуації, що виникають у насосної станції в процесі експлуатації. При цьому у випадку несправності - насос відключається. Однак, реалізація лише функцій контролю експлуатаційних показників НА без можливості здійснення регулювання вихідних параметрів не дозволяє уникнути появи аварійного режиму, передумови виникнення аварійних ситуацій залишаються невідомими. Найбільш близьким технічним рішенням є спосіб контролю та керування параметрами насосного агрегату шляхом впливу на швидкість обертання електродвигуна насоса [АС СРСР №2982351/2506, кл. F04D15/00, 07.05.1982р., Бюл. №17], де датчиками тиску і витрати вимірюються поточні значення відповідних величин, блоком порівняння фактичного і заданого режимів обчислюється похідна витрати насосної установки по тиску, ви хідний сигнал якого дорівнює нулю при відсутності зміни витрати і тиску та при зростанні тиску в межах, коли зміна тиску не приводить до зміни витрати. При відхиленні похідної від нуля відбувається включення визначника зміни режиму роботи, вихідний сигнал якого пропорційний необхідній швидкості обертання робочого колеса насоса. До недоліків відомого способу варто віднести відсутність урахування впливу щільності та температури рідини, що перекачується, на експлуатаційні пара 5 71355 6 метри (напір, продуктивність, потужність) насосночастоти обертання турбомашини, її конструктивго агрегату. них особливостей, властивостей робочого середоВідомий пристрій автоматичного контролю і вища (її температури, щільності), що перекачуєтьзахисту насосної станції [АС СРСР №2959604/25ся. 06, кл. F04D15/00, 07.04.1982р., Бюл. №13], що Розглянемо режим роботи такої насосної містить датчики тиску на виході насосів і датчики установки. Гідродинамічний захист насосної устаспоживаної потужності, задатчики тиску, еталонні новки формується з двох рівнів. Перший рівень моделі споживаної потужності, групу пристроїв полягає в тому, що датчиками тиску і витрати випорівняння, блоки компараторів, діагностики та мірюють поточні величини напору і продуктивності сигналізації. Сигнали від датчиків тиску і потужнона виході турбомеханізма, визначають похідні цих сті, пропорційні реальним величинам тиску і сповеличин у заданий момент часу; при виникненні в живаної потужності НА, а також сигнали еталонних трубопровідній мережі перевантаження по тиску моделей споживання потужності і необхідної ве(напору) чи зниженні витрати обчислюють час доличини тиску надходять на входи відповідних присягнення на виході насоса максимально припустистроїв порівняння, на виході яких формуються мої величини напору, трохи меншої аварійного сигнали неузгодженості, що надходять на відповізначення, та мінімально припустимої величини дні входи компараторів. Виходи з блоків компарапродуктивності, що трохи перевищує значення, торів зв'язані з блоком діагностики, де реалізуєтьпри якому настає помпаж, після закінчення якого ся алгоритм, що відображає різноманітні ситуації, формується сигнал у систему керування перетвоякі виникають у НС в процесі експлуатації. Недолірювачем для зміни швидкості обертання вала елеком цього пристрою є те, що у випадку несправноктродвигуна насоса. При цьому здійснюється вимір сті - насос відключається. Однак, часті пуски та споживаної потужності Pn на затискачах статора останови насосних агрегатів призводять до передасинхронного двигуна за допомогою датчика почасного виходу зі строю те хнологічного обладнантужності і визначення значення потужності нероня, зниження надійності роботи насосної станції. бочого ходу Pn 0, що має місце при величині проНайбільш близьким технічним рішенням є дуктивності на виході насоса, що дорівнює нулю, і пристрій для керування електроприводом насосної залежить від частоти обертання турбомашини, її установки [АС СРСР №2982351/25-06, кл. конструктивних особливостей, щільності і темпеF04F15/00, 07.05.1982р., Бюл. №17], що містить ратури робочого середовища, що перекачується. перетворювач для керування електродвигуном Другий рівень гідродинамічного захисту НУ полянасосу, датчики тиску і витрати, що розміщені на гає в тому, що у випадку подальшого зниження виході насосної установки, блок порівняння факпродуктивності на виході НА до нуля і виконання тичного і заданого режимів, що виконаний у виді схеми обчислення похідної витрати НУ по тиску. умови, коли Pn = Pn0 , для виключення протитоку Сигнал на виході даної схеми дорівнює нулю при рідини і небезпеки зворотного ходу турбомашини відсутності зміни витрати і тиску та при зростанні система керування формує сигнал, що надходить тиску в межах, коли зміна тиску не приводить до на закриття зворотного клапана насоса. зміни витрати; при відхиленні похідної від нуля Винахід пояснюється кресленнями: відбувається включення визначника зміни режиму фіг.1 - Блок-схема способу гідродинамічного роботи, вихідний сигнал якого пропорційний необзахисту насосної установки; хідній швидкості обертання робочого колеса насофіг.2 - Графік зміни вихідних параметрів насоса. До недоліків відомого пристрою варто віднести са протягом часу; відсутність керованих пристроїв захисту від знифіг.3 - Алгоритм роботи блоку визначення поження продуктивності до нуля, що може привести тужності неробочого ходу 12; до виникнення помпажних режимів, протитоку ріфіг.4 - Алгоритм роботи обчислювального дини і небезпеки зворотного ходу турбомашини. блоку 17; Метою винаходу є підвищення ефективності і фіг.5 - Алгоритм роботи обчислювального надійності роботи насосної установки. блоку 18; Поставлена мета досягається тим, що запрофіг.6 - Алгоритм роботи програмно-керуючого понований спосіб гідродинамічного захисту насоспристрою 20. ної установки від нестійких режимів у гідромережі Запропонований спосіб гідродинамічного заполягає в контролі і керуванні напором та продукхисту насосної установки (фіг.1), що включає відтивністю, споживаною потужністю і потужністю центровий насос 1 з асинхронним електродвигунеробочого ходу насосного агрегату з регульованом 2, перетворювач 3, датчики тиску 10 і витрати ним електроприводом шляхом впливу на швид11 на виході насоса, відрізняється тим, що датчикість обертання двигуна насоса чи на зворотний ками потужності 7, швидкості 8 та температури 9 клапан, установлений на напірному патрубку навимірюють відповідно потужність, споживану насососа, при виникненні перевантаження по тиску в сом 1, швидкість обертання електродвигуна 2 туртрубопроводі чи зниженні продуктивності до мінібомеханізма, температуру рідини, обчислюють мально припустимої. При цьому граничною уморізницю поточної Ти і стандартної Т0 температури вою спрацьовування зворотного клапана для виробочого потоку, що перекачується DТ= Ти-Т 0 виключення протитоку рідини і зворотного ходу значають розрахункове значення щільності рідини гідромашини є умова, коли споживана потужність r0 насоса буде дорівнювати потужності неробочого при зміні температури r t = з урахуванням 1+ b t DT ходу, що має місце при величині продуктивності на виході насоса, що дорівнює нулю, і залежить від щільності r 0 потоку, що відповідає стандартній 7 71355 8 температурі, і коефіцієнта температурного розшиДля аналізу граничних умов спрацьовування гідродинамічного захисту насосного агрегату з рення b 1 робочого середовища, що перекачується, обчислюють потужність неробочого ходу регульованим електроприводом розглянемо його напірно-витратні й енергетичні характеристики при r1 Pn0 D3 n3 = насоса у формі добутку куба віднозміні швидкості обертання робочого колеса насоr0 са: сної швидкості обертання двигуна насоса, апрок- H(Q) - характеристика насоса симаційного конструктивного коефіцієнта турбо(7) H = A 2n 2 + B2 nQ + C2Q 2; механізма і відносної щільності рідини, що перекачується; вимірюють напір Н и та продуктив- споживана потужність відцентрової машини ність Qи на виході турбомеханізма, визначають (8) P = A 3n 2Q + B3 nQ 2 + D3 n3 ; dH dQ - корисна потужність насоса похідні по напору і продуктивності в моdt dt rg (9) мент часу t=t0; при виникненні перевантаження по Pп = A2 n2Q + B2nQ 2 + C 2Q 3 ; 1000 dH - ККД турбомеханізма напору, коли > 0, чи зниженні продуктивності, dt Р r g A 2n 2Q + B2n Q2 + C2Q 3 dQ (10) h тм = п = , коли < 0, обчислюють час досягнення на виР 1000 A 3n 2Q + B3 nQ2 + D 3Q 3 dt де у вираженнях (7)-(10): Q - подача насоса, ході насоса максимально припустимої величини м 3/с; Н - напір насоса, м; n = w / wн - відносна швиHmax доп - Hи напору Dt1 = та мінімально припусdH дкість обертання робочого колеса насоса; wн dt ( t = t 0 ) номінальна швидкість обертання насоса, с-1; A2, B2, C2, A3, B 3, D3 - коефіцієнти апроксимації, що Qmin доп - Qи залежать від конструктивних особливостей турботимої величини подачі Dt 2 = , після dQ механізма й обумовлені по паспортних характериdt ( t = t 0 ) стиках насосів; r - щільність рідини, кг/м 3, g - призакінчення якого формується сигнал у систему скорення вільного падіння, g=9,81м/с2. Аналіз залежності (8) показав, що при зміні чакерування 20 перетворювачем 3 для зміни швидкості обертання вала електродвигуна насоса; при стоти обертання вала електродвигуна турбомехаподальшому зниженні продуктивності в гідроменізма, коли Q=0, величина споживаної потужності режі до нуля, коли Qи=0, та рівності потужності, дорівнює потужності неробочого ходу P0 = D3 n3 , споживаної насосним агрегатом, потужності нерощо обумовлена створенням напору Н 0 при нульобочого ходу Рn= Рn 0, формується сигнал на виковій продуктивності, втратами на тертя в підшипнинавчий механізм 6 для закриття зворотного клапаках, робочому колесі насоса, і залежить від куба на 5 насоса. відносної швидкості обертання й апроксимаційного З графіка зміни вихідних параметрів насоса коефіцієнта, що враховує конструктивні особливопротягом часу (фіг.2) випливає: сті гідромашини. Крім того, при перекачуванні і - напір на виході турбомеханізма транспортуванні рідини з щільністю r 0, що відпоdH H(t ) = Hи + Dt; (1) відає стандартній температурі Т0 (наприклад, для dt ( t =t 0 ) води r0 = 0,999г / см3 при Т0=15°З; для нафти - продуктивність насоса dQ r0 = 0,76 - 0,9г / см 3 при Т0=20°З; для бензину Q( t ) = Qи + Dt; (2) dt (t =t 0 ) r0 = 0,68 - 0,78г / см3 при Т0=15°З), поточне зна- максимально припустиме значення напору чення температури робочого середовища і відпоdH Hmax доп = Hи + Dt1; (3) відно щільність рідини змінюються, що впливає на dt ( t =t 0 ) експлуатаційні параметри насоса. З урахуванням - максимально припустиме значення продуксказаного, потужність неробочого ходу турбомехативності нізма обчислюється вираженням виду: dQ r / Qmin доп = Qи + D t2 ; (4) P0 = D3n 3 t , (11) dt ( t = t 0 ) r0 З виразів (3), (4) знайдемо час досягнення на r0 де r t = - щільність гідросуміші при виході гідромашини 1+ b t DT - максимально припустимої величини напору ( Hmax доп - Hи ; (5) dH dt (t =t 0 ) - мінімально припустимої величини подачі Qmin доп - Qи Dt 2 = ; (6) dQ dt (t =t 0 ) Dt1 = ) зміні температури на величину DT = Tи - T0; b t коефіцієнт температурного розширення (для води b t = 0,000014; для нафти b t = 0,00082; для мінеральних олій b t = 0,0008). Запропонований пристрій гідродинамічного захисту насосної установки, що включає насосний агрегат 1 з асинхронним електродвигуном 2, перетворювач 3, датчики тиску 10 і витрати 11 на вихо 9 71355 10 ді турбомеханізма може бути реалізований за до16; виходи першого і другого обчислювальних помогою способу (фіг.1), що відрізняється тим, що блоків 17, 18 з'єднані з першим і другим входами він оснащений датчиком потужності 7, вихід якого програмно-керуючого пристрою 20, третій вхід підключений до статорних затискачів асинхронноякого підключений до виходу суматора 19; перший го електродвигуна 2, а вхід з'єднаний з виходами вихід програмно-керуючого пристрою 20 з'єднаний перетворювача 3, вхід якого з'єднаний із промисз керуючим входом перетворювача частоти 3, друловою енергомережею через вимикач 4; датчиком гий вихід зв'язаний з виконавчим механізмом 6 швидкості 8, який розташований на одному валу з зворотного клапана 5 на виході насоса. електричним двигуном 2, датчиком температури 9 Причому датчик потужності може бути реалірідини, що перекачується, який установлений на зований на базі відомих типових датчиків потужновході робочого колеса насоса 1; першим і другим сті, наприклад, фірми LEM; датчик швидкості може задатчиками 13, 14 конструктивного коефіцієнта бути представлений тахогенератором, розміщенасоса і щільності робочого середовища, що відним на одному валу з асинхронним двигуном; у повідає стандартній температурі рідини, блоком якості датчика температури можуть бути викорисвизначення потужності неробочого ходу 11, суматані типові датчики серій ТЗК, ТПК, ПТР-3. Протором 19; причому перший, другий, третій і четвеграмно-керуючий пристрій 20 може бути реалізортий входи блоку визначення потужності неробований на базі типових контролерів, наприклад, чого ходу 12 насоса зв'язані з відповідними серії PIC16FXX, Motorolla HC08. Алгоритми роботи виходами першого і другого задатчиків 13, 14, датблоку визначення потужності неробочого ходу 12, чиків швидкості 8 та температури 9, а вихід підобчислювальних блоків 17, 18 і програмноключений до першого входу суматора 19, другий керуючого пристрою 20 приведені на фіг.3-6 відповхід якого зв'язаний з датчиком споживаної потужвідно. ності 7 насоса; першим і другим обчислювальними Запропонований спосіб гідродинамічного запристроями 17, 18, третім і четвертим задатчикахисту насосної установки дозволяє підвищити ми максимально припустимої величини напору 15 енергетичні й економічні показникироботи гідрота мінімально припустимої величини продуктивнотранспортних систем, здійснити плавне регулюсті 16, програмно-керуючим пристроєм 20; причовання вихідних параметрів відповідно до технолому виходи датчиків тиску 10 і витрати 11 зв'язані з гічних вимог, виключити появу аварійних ситуацій першими входами першого і другого обчислювау гідромережі, підвищити надійність роботи всього льних блоків 17, 18, до други х входів яких підклютехнологічного устаткування. чені виходи з третього і четвертого задатчиків 15, 11 Комп’ютерна в ерстка Л.Литв иненко 71355 Підписне 12 Тираж 37 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for hydrodynamic protection of pump unit and appliance for its implementation
Автори англійськоюKorenkova Tetiana Valeriivna, Rodkin Dmytro Yosypovych
Назва патенту російськоюСпособ гидродинамической защиты насосной установки и устройство для его реализации
Автори російськоюКоренькова Татьяна Валериевна, Родькин Дмитрий Иосифович
МПК / Мітки
МПК: F04D 27/00, H02P 7/00
Мітки: захисту, насосної, установки, пристрій, спосіб, гідродинамічного, реалізації
Код посилання
<a href="https://ua.patents.su/6-71355-sposib-gidrodinamichnogo-zakhistu-nasosno-ustanovki-ta-pristrijj-dlya-jjogo-realizaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб гідродинамічного захисту насосної установки та пристрій для його реалізації</a>
Пристрій контролю параметрів насосної установки
Номер патенту: 55324
Опубліковано: 17.03.2003
Автори: Родькін Дмитро Йосипович, Коренькова Тетяна Валеріївна, Чорний Олексій Петрович, Сісюк Генадій Юрійович, Луговой Анатолій Васильович, Пасмурских Олександр Олексійович
МПК: F04D 15/00
Мітки: насосної, установки, параметрів, контролю, пристрій
Формула / Реферат:
Пристрій контролю параметрів насосної установки, що містить перетворювач для живлення силового кола двигуна, асинхронний двигун, відцентровий насос, який відрізняється тим, що додатково обладнаний датчиком потужності на затискачах статора асинхронного двигуна, датчиками струму статора, напруги і частоти, першим, другим і третім суматорами, блоком визначення втрат двигуна, обчислювальним блоком для визначення фактичних параметрів насосної...
Спосіб зупинки водовідливної установки і пристрій для його реалізації

Номер патенту: 61295
Опубліковано: 17.11.2003
Автори: Карпов Павло Олександрович, Чеберячко Юрій Іванович, Чеберячко Іван Михайлович, Євтєєв Володимир Васильович, Шворак Віталій Григорович, Кириченко Євген Олексійович
МПК: F04F 1/00, F04F 1/20, E21F 17/00
Мітки: зупинки, реалізації, водовідливної, пристрій, установки, спосіб
Формула / Реферат:
1. Спосіб зупинки водовідливної установки, що включає попереднє задання і регулювання поточних параметрів робочої рідини, припинення подачі робочої рідини в трубопровід, який відрізняється тим, що попередньо задають і регулюють величину тиску в нижньому перерізі нагнітального трубопроводу, при перевищенні цього значення збільшують подачу стиснутого повітря в насос до досягнення заданого значення тиску, при якому здійснюють зупинку установки...
Демонстраційна модель насосної установки
Номер патенту: 62489
Опубліковано: 15.12.2003
Автори: Перекрест Андрій Леонідович, Костюк Юрій Сергійович, Родькін Дмитро Йосипович, Михайличенко Дмитро Анатолійович, Коренькова Тетяна Валеріївна
МПК: F04D 27/00
Мітки: установки, насосної, модель, демонстраційна
Формула / Реферат:
Демонстраційна модель насосної установки, що включає перший і другий насосні агрегати, з'єднані паралельно, перший і другий привідні двигуни однойменних насосних агрегатів, першу засувку на вході і другу засувку на подачі першого насоса, першу засувку на вході і другу засувку на подачі другого насоса, датчики тиску і продуктивності першого і другого насоса, яка відрізняється тим, що вона додатково обладнана третім насосним агрегатом,...
Привід штангової насосної установки з нереверсивним інерційно-вантажним урівноважуванням
Номер патенту: 2487
Опубліковано: 17.05.2004
Автори: Санжаровська Ганна Юріївна, Доля Юрій Іванович, Доля Анатолій Юрійович
МПК: E21B 43/00
Мітки: інерційно-вантажним, нереверсивним, урівноважуванням, привід, насосної, штангової, установки
Формула / Реферат:
1. Привід штанговий насосної установки з нереверсивним інерційно-вантажним урівноважуванням, що містить електродвигун з живленням від серійного перетворювача частоти, кінематично з'єднаний з насосом та противагами, який відрізняється тим, що вантажне урівноважування доповнене інерційним урівноважуванням, виконаним у вигляді необхідної маси маховика, кінематично зв'язаного з електродвигуном для забезпечення більш економної витрати...
Спосіб управління насосною станцією та пристрій для його реалізації
Номер патенту: 62490
Опубліковано: 15.12.2003
Автори: Перекрест Андрій Леонідович, Коренькова Тетяна Валеріївна, Родькін Дмитро Йосипович, Костюк Сергій Миколайович, Живора Валерій Федорович
МПК: H02P 5/74, F04D 27/00
Мітки: спосіб, насосною, пристрій, станцією, реалізації, управління
Формула / Реферат:
1. Спосіб управління насосною станцією, яка включає перший і другий насосні агрегати з електроприводом і засувками на вході та на подачі, що полягає в контролі параметрів насосних агрегатів, регулюванні їхньої продуктивності та тиску за заданим параметром шляхом впливу на швидкість обертання насосних агрегатів, який відрізняється тим, що другий насосний агрегат, обладнаний насосом-турбіною з регульованим електроприводом, включається в...