Пристрій контролю параметрів насосної установки
Номер патенту: 55324
Опубліковано: 17.03.2003
Автори: Чорний Олексій Петрович, Родькін Дмитро Йосипович, Пасмурских Олександр Олексійович, Коренькова Тетяна Валеріївна, Луговой Анатолій Васильович, Сісюк Генадій Юрійович

Формула / Реферат
Пристрій контролю параметрів насосної установки, що містить перетворювач для живлення силового кола двигуна, асинхронний двигун, відцентровий насос, який відрізняється тим, що додатково обладнаний датчиком потужності на затискачах статора асинхронного двигуна, датчиками струму статора, напруги і частоти, першим, другим і третім суматорами, блоком визначення втрат двигуна, обчислювальним блоком для визначення фактичних параметрів насосної установки, причому вихід датчика потужності підключений до першого входу першого суматора, виходи з датчиків струму, напруги і частоти підключені до першого, другого і третього входів блока визначення втрат двигуна, на четвертий вхід якого запроваджують параметри схеми заміщення та механічні втрати двигуна, вихід блока визначення втрат двигуна підключений до другого входу першого суматора, вихід першого суматора, параметром якого є величина потужності на валу двигуна, надходить на перший вхід обчислювального блока, на другий вхід якого запроваджують конструктивні і енергетичні параметри насоса і параметри мережі споживача, перший вихід обчислювального блока, який характеризує фактичне значення напору, підключений до першого входу другого суматора, другий вихід обчислювального блока, параметром якого є фактичне значення подачі насосної установки, зв'язаний з першим входом третього суматора, на другий вхід другого суматора і на другий вхід третього суматора надходять сигнали завдання напору і подачі, вихід другого суматора і вихід третього суматора зв'язані з управляючим входом перетворювача.
Текст
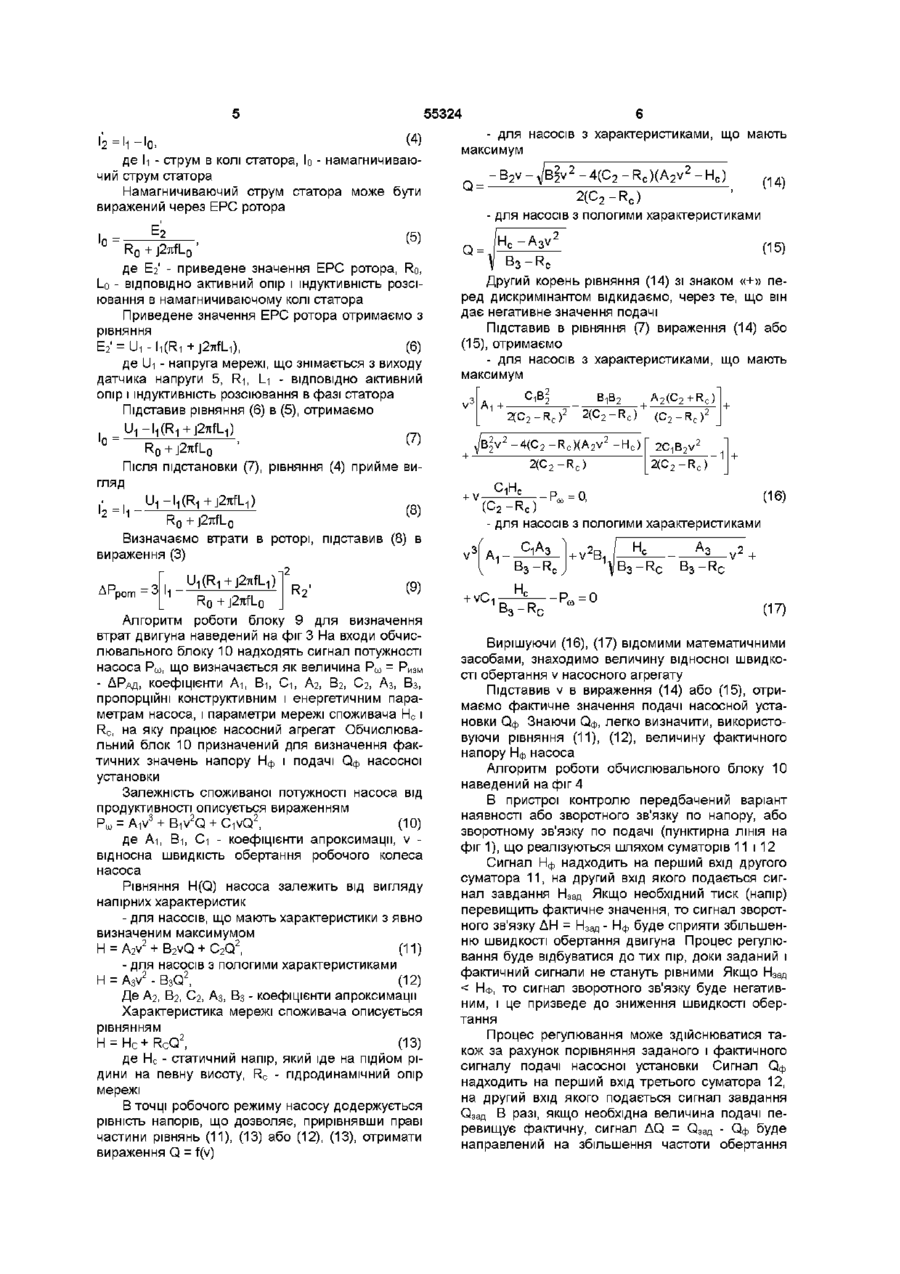
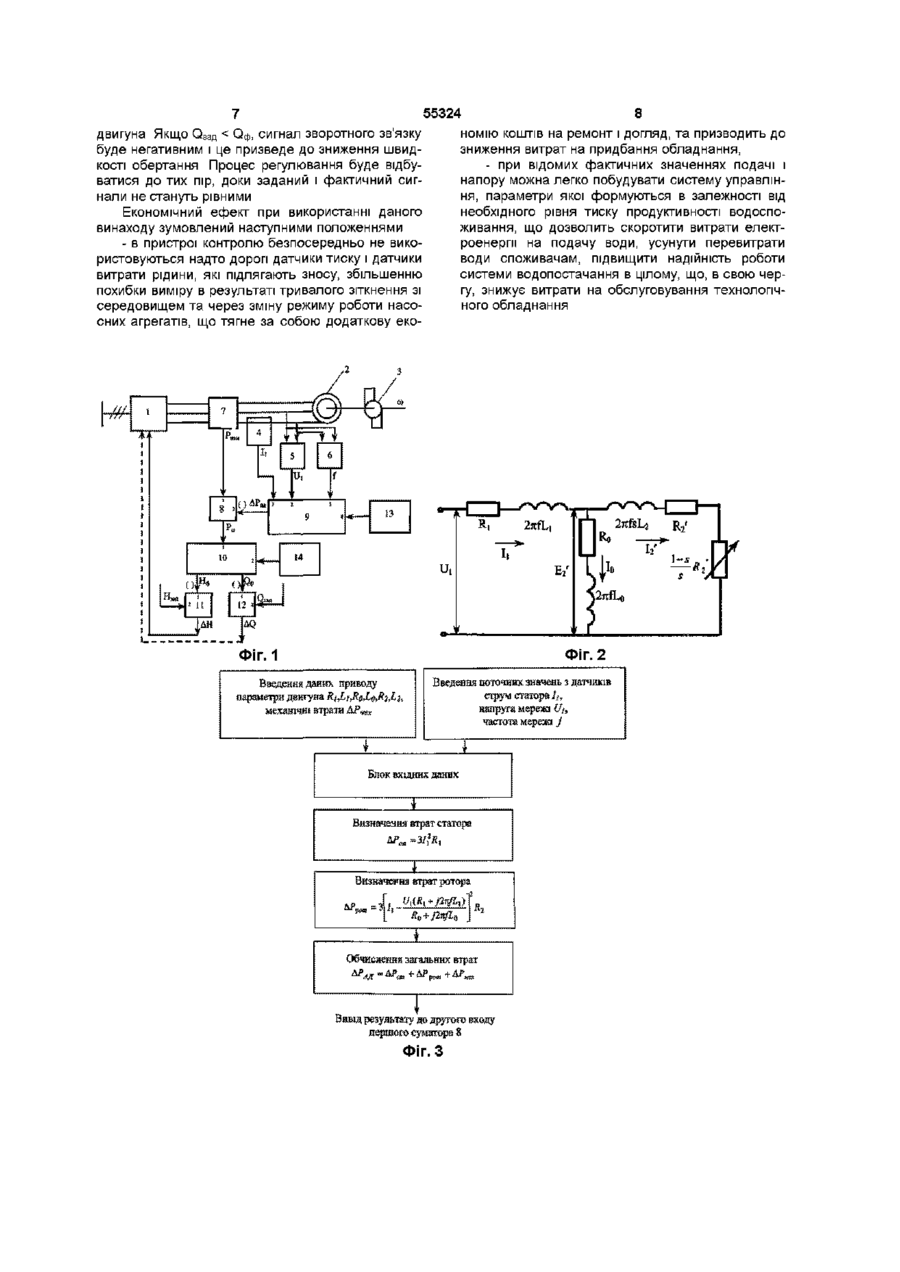
Пристрій контролю параметрів насосної установки, що містить перетворювач для живлення силового кола двигуна, асинхронний двигун, відцентровий насос, який відрізняється тим, що додатково обладнаний датчиком потужності на затискачах статора асинхронного двигуна, датчиками струму статора, напруги і частоти, першим, другим і третім суматорами, блоком визначення втрат двигуна, обчислювальним блоком для визначення фактичних параметрів насосної установки, причому вихід датчика потужності підключений до першого входу першого суматора, виходи з датчиків струму, напруги і частоти підключені до першого, другого і третього входів блока визначення втрат двигуна, на четвертий вхід якого запроваджують параметри схеми заміщення та механічні втрати двигуна, вихід блока визначення втрат двигуна підключений до другого входу першого суматора, вихід першого суматора, параметром якого є величина потужності на валу двигуна, надходить на перший вхід обчислювального блока, на другий вхід якого запроваджують конструктивні і енергетичні параметри насоса і параметри мережі споживача, перший вихід обчислювального блока, який характеризує фактичне значення напору, підключений до першого входу другого суматора, другий вихід обчислювального блока, параметром якого є фактичне значення подачі насосної установки, зв'язаний з першим входом третього суматора, на другий вхід другого суматора і на другий вхід третього суматора надходять сигнали завдання напору і подачі, вихід другого суматора і вихід третього суматора зв'язані з управляючим входом перетворювача Винахід відноситься до електротехніки та може бути використаний в системах управління регульованим електроприводом насосних установок водопостачання для забезпечення необхідного режиму роботи насосної установки, при якому и продуктивність відповідає водоспоживанню, а тиск в мережі знаходиться у заданих межах Відомо про пристрій управління продуктивністю насосної установки шляхом додаткового включення резервного насосу [Попкович Г С , Гордеев М А Автоматизация систем водоснабжения и водоотведения -М "Высшая школа", 1986 г, с 264] Пристрій включає в себе робочий та резервний насоси, датчики тиску, електрокомутуючу апаратуру управління робочим та резервним насосними агрегатами Недоліком цього пристрою є те, що регулювання здійснюється вручну з контролем параметрів візуально Встановлення заданого значення тиску здійснюється оператором В результаті неминуча перевитрата електроенергії, відхилення вихідного тиску від заданого при ЗМІНІ параметрів пдромережі, що призводить до підвищення аварійності та зниження надійності роботи системи водопостачання у цілому Відомо про пристрій управління режимом роботи насосної установки [Лезнов Б С Экономия электроэнергии в насосных установках М «Энергоатомиздат»,1991г, с 98], який включає регульований електропривод того або іншого типу, насос, задаючий пристрій, регулятор, зв'язаний своїм виходом з входом регульованого електропривода, датчик тиску, який контролює робочий параметр на виході насосної установки, і суматор, перший вхід якого зв'язаний з виходом датчика тиску, другий вхід з'єднаний з виходом задаючого пристрою, вихід суматора підключений до входу регулятора Недоліком даного технічного рішення є те, що використовуваний датчик є надто дорогим приладом контролю, який працюючи в агресивному середовищі, з течією часу втрачає точність виміру, потребує частої перевірки, що викликає додаткові витрати на ремонт та догляд Крім того, со Ю Ю 55324 системи подібного роду можуть замикатися не тільки по тиску (напору), але і по продуктивності (подачі) насосної установки В такому разі система характеризується низькими показниками надійності із-за можливого виходу з ладу використовуваних датчиків В основу винаходу поставлено задачу підвищення ефективності функціонування насосної установки системи водопостачання шляхом створення пристрою контролю вихідних параметрів насосних агрегатів, який оснащений датчиками виміру електричних параметрів споживання електроенергії асинхронним двигуном насосу та обчислювальними блоками визначення втрат двигуна і фактичних параметрів насосної установки, що забезпечить підвищення точності виміру напору та подачі, зменшення витрат електроенергії на подачу води споживачам, підвищення надійності роботи технологічного обладнання Поставлена задача вирішується тим, що пристрій контролю параметрів насосної установки містить перетворювач для живлення силового кола двигуна, асинхронний двигун, відцентровий насос, згідно з винаходом, він додатково обладнаний датчиком потужності на затискачах статора асинхронного двигуна, датчиками струму статора, напруги і частоти, першим, другим і третім суматорами, блоком визначення втрат двигуна, обчислювальним блоком для визначення фактичних параметрів насосної установки, причому вихід датчика потужності підключений до першого входу першого, суматора, виходи з датчиків струму, напруги і частоти підключені до першого, другого і третього входів блоку визначення втрат двигуна, на четвертий вхід якого запроваджуються параметри схеми заміщення та механічні втрати двигуна, вихід блоку визначення втрат двигуна підключений до другого входу першого суматора, і вихід першого суматора, параметром якого є величина потужності на валу двигуна, надходить на перший вхід обчислювального блоку, на другий вхід якого запроваджуються конструктивні і енергетичні параметри насоса і параметри мережі споживача, перший вихід обчислювального блоку, який характеризує фактичне значення напору, підключений до першого входу другого суматора, другий вихід обчислювального блоку, параметром якого є фактичне значення подачі насосної установки, зв'язаний з першим входом третього суматора, на другий вхід другого суматора і на другий вхід третього суматора надходять сигнали завдання напору і подачі, вихід другого суматора і вихід третього суматора зв'язані з управляючим входом перетворювача На фіг 1 наведена блок-схема пристрою контролю параметрів насосної установки, на фіг 2 схема заміщення асинхронного двигуна, на фіг 3 алгоритм роботи блоку 9 для визначення втрат двигуна, на фіг 4 - алгоритм роботи обчислювального блоку 10 для визначення фактичних параметрів насосної установки Пристрій контролю параметрів насосної установки включає перетворювач 1 для живлення силового кола двигуна, асинхронний двигун 2, відцентровий насос 3, додатково обладнаний датчиком струму статора 4, датчиком напруги 5, датчиком частоти живлення мережі 6, датчиком споживаної потужності 7, першим суматором 8, блоком визначення втрат двигуна 9, обчислювальним блоком 10 визначення фактичних параметрів насосної установки, другим і третім суматорами 11 і 12, причому вихід датчика потужності 7 підключений до першого входу першого суматора 8, виходи з блоків 4, 5, 6 надходять на перший, другій і третій входи блоку визначення втрат двигуна 9, на четвертий вхід якого надходять сигнали з блоку 13, пропорційні параметрам схеми заміщення і механічним втратам двигуна Вихід блоку 9 підключений до другого входу першого суматора 8, вихідний сигнал якого пропорційний потужності на валу двигуна Вихід першого суматора надходить на перший вхід обчислювального блоку 10, на другий вхід блоку 10 подаються сигнали з блоку 14, пропорційні конструктивним і енергетичним параметрам насоса і мережі споживача Перший вихід обчислювального блоку 10, який характеризує фактичне значення тиску на виході насосної установки, підключений до першого входу другого суматора 11, на другий вихід якого подається сигнал, пропорційний заданому значенню тиску Вихід другого суматора 11 зв'язаний з управляючим входом перетворювача 1 регульованого електропривода Пристрій контролю відрізняється тим, що другий вхід обчислювального блоку 10, пропорційний фактичному значенню продуктивності, зв'язаний з першим входом третього суматора 12, на другий вихід якого подається сигнал, пропорційний заданому значенню продуктивності Вихід третього суматора 12 зв'язаний з управляючим входом перетворювача 1 Пристрій контролю працює слідуючим чином Вимір споживаної потужності РИЗн здійснюється на затискачах статора асинхронного двигуна за допомогою датчика потужності 7 (фиг 1) Струм в колі статора h вимірюється датчиком струму 4, напруга кола статора (напруга мережі) Ui - шляхом датчика напруги 5, а частота струму в обмотках статора (частота мережі) f - датчиком частоти 6 В якості означених датчиків можна використати ВІДОМІ стандартні датчики виміру змінного струму, напруги, частоти і потужності Виходи з блоків 4, 5, 6, а також параметри схеми заміщення двигуна і механічні втрати двигуна, які надходять з блоку 13, підключені до входів блоку 9, який призначений для обчислення втрат потужності двигуна ДР/зд = ДРсгп + ДРрогп + ДРмех, (1) де ДР с т , ДРрот - втрати потужності на нагрів в статорному та роторному колі двигуна ВІДПОВІДНО, ДРмех - механічні втрати, що визначаються дослідним шляхом Втрати в статорі знаходяться з вираження „ D A r V r n — ОМ Г \ 1 , де h - струм в статорному колі, опір статора Втрати в роторі і J\ \*-} - активний (3) ' . приведений струм ротора, 2 R2 . актив ний приведений опір ротора Значення струму ротора визначається з схеми заміщення асинхронного двигуна, наведеної на фіг 2 55324 С4) I2=h-io, де h - струм в колі статора, Іо - намагничиваючий струм статора Намагничиваючий струм статора може бути виражений через ЕРС ротора R o + j27ifLo ' - для насосів з характеристиками, що мають максимум Q = -B2v-A/Biv2-4(C2-Rc)(A2v2-Hc) - для насосів з пологими характеристиками HC-A3V (15) Вз-Rc Другий корень рівняння (14) зі знаком «+» перед дискримінантом відкидаємо, через те, що він дає негативне значення подачі Підставив в рівняння (7) вираження (14) або (15), отримаємо - для насосів з характеристиками, що мають максимум Q = де E2' - приведене значення ЕРС ротора, Ro, Lo - ВІДПОВІДНО активний опір і індуктивність розсіювання в намагничиваючому колі статора Приведене значення ЕРС ротора отримаємо з рівняння Е2' = Ui -h(Ri +j27ifl_i), (6) де Ui - напруга мережі, що знімається з виходу датчика напруги 5, Ri, l_i - ВІДПОВІДНО активний опір і індуктивність розсіювання в фазі статора (14) 2(C2-RC) C-IBJ В-|В2 2(C2-RC)2 Підставив рівняння (6) в (5), отримаємо 2(C2-RC) А2(С2 +RC) (C 2 -R c r _U1-l1(R1+j27ifL1) 0 R o + j27ifL 0 ' Після підстановки (7), рівняння (4) прийме вигляд 2(C2-RC) C + vІ , • -, г, R0+j27ifl_0 (8) (C U1(R1+j27ifL1) —п ^—7, -1 1Hc 2 -R c ) (16) ™ - для насосів з пологими характеристиками Визначаємо втрати в роторі, підставив (8) в вираження (3) А " рот 2(C2-RC) B Вз-Rc і2 ^2 (9) R Q + J2TITLQ Алгоритм роботи блоку 9 для визначення втрат двигуна наведений на фіг 3 На входи обчислювального блоку 10 надходять сигнал потужності насоса Рш, що визначається як величина Р ш = РИзн - ДРдц, коефіцієнти Аі, Ві, Сі, А2, В2, С 2 , А3, В3, пропорційні конструктивним і енергетичним параметрам насоса, і параметри мережі споживача Н с і Rc, на яку працює насосний агрегат Обчислювальний блок 10 призначений для визначення фактичних значень напору Нф і подачі Оф насосної установки Залежність споживаної потужності насоса від продуктивності описується вираженням Р ш = Aiv 3 + Biv 2 Q + CivQ 2 , (10) де А-і, В-і, Сі - коефіцієнти апроксимації, v відносна швидкість обертання робочого колеса насоса Рівняння H(Q) насоса залежить від вигляду напірних характеристик - для насосів, що мають характеристики з явно визначеним максимумом Н = A 2 v22 + B 2 vQ + C 2 Q22 (11) - для насосів з пологими характеристиками H = A3v2-B3Q2, (12) Де А2, В2, С 2 , Аз, В 3 - коефіцієнти апроксимації Характеристика мережі споживача описується рівнянням H = Hc+RcQ2, (13) де Н с - статичний напір, який іде на підйом рідини на певну висоту, Rc - гідродинамічний опір мережі В точці робочого режиму насосу додержується рівність напорів, що дозволяє, прирівнявши праві частини рівнянь (11), (13) або (12), (13), отримати вираження Q = f(v) + vC, Br, — Rr (17) Вирішуючи (16), (17) відомими математичними засобами, знаходимо величину відносної швидкості обертання v насосного агрегату Підставив v в вираження (14) або (15), отримаємо фактичне значення подачі насосной установки Оф Знаючи О.ф, легко визначити, використо. вуючи рівняння (11), (12), величину фактичного напору Нф насоса Алгоритм роботи обчислювального блоку 10 наведений на фіг 4 В пристрої контролю передбачений варіант наявності або зворотного зв'язку по напору, або зворотному зв'язку по подачі (пунктирна ЛІНІЯ на фіг 1), що реалізуються шляхом суматорів 11 і 12 Сигнал Нф надходить на перший вхід другого суматора 11, на другий вхід якого подається сигнал завдання Нзад Якщо необхідний тиск (напір) перевищить фактичне значення, то сигнал зворотного зв'язку ДН = Нзад - Нф буде сприяти збільшенню швидкості обертання двигуна Процес регулювання буде відбуватися до тих пір, доки заданий і фактичний сигнали не стануть рівними Якщо Н з а д < Нф, то сигнал зворотного зв'язку буде негативним, і це призведе до зниження швидкості обертання Процес регулювання може здійснюватися також за рахунок порівняння заданого і фактичного сигналу подачі насосної установки Сигнал Оф . надходить на перший вхід третього суматора 12, на другий вхід якого подається сигнал завдання Озад В разі, якщо необхідна величина подачі перевищує фактичну, сигнал ДО = О з а д - Оф буде направлений на збільшення частоти обертання 55324 двигуна Якщо Q 3afl третього суматора 12 Фіг. 4 Підписано до друку 03 04 2003 р Тираж 39 прим ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)236-47-24
ДивитисяДодаткова інформація
Назва патенту англійськоюUnit for parameters of pump iplant controlling
Автори англійськоюLuhovoi Anatolii Vasyliovych, Rodkin Dmytro Yosypovych, Korenkova Tetiana Valeriivna, Chornyi Oleksii Petrovych, Pasmurskykh Oleksandr Oleksiyovych
Назва патенту російськоюУстройство контроля параметров насосной установки
Автори російськоюЛуговой Анатолий Васильевич, Родькин Дмитрий Иосифович, Коренькова Татьяна Валериевна, Черный Алексей Петрович, Пасмурских Александр Алексеевич
МПК / Мітки
МПК: F04D 15/00
Мітки: установки, параметрів, насосної, пристрій, контролю
Код посилання
<a href="https://ua.patents.su/5-55324-pristrijj-kontrolyu-parametriv-nasosno-ustanovki.html" target="_blank" rel="follow" title="База патентів України">Пристрій контролю параметрів насосної установки</a>
Система контролю та реєстрації параметрів силової установки літального апарата
Номер патенту: 31643
Опубліковано: 15.07.2002
Автор: БЕЗСЧАСТНИЙ Василь Олексійович
МПК: G06F 15/16, F02C 9/28
Мітки: контролю, параметрів, силової, установки, система, літального, апарата, реєстрації
Формула / Реферат:
Система контролю та реєстрації параметрів силової установки літального апарата, яка містить блок обчислювача, послідовно з’єднані блок нормалізаторів, комутатор, аналого-цифровий перетворювач, перший операційний блок виходами з’єднаний з блоком обчислювача та комутатором, яка відрізняється тим, що в систему додатково введені два блоки формувачів, два перетворювачі частота-код, другий комутатор, два шинних формувачі, два блоки автоматичного...
Система контролю та реєстрації параметрів силової установки літального апарата
Номер патенту: 54605
Опубліковано: 17.03.2003
Автори: Дробінов Вадим Павлович, БЕЗСЧАСТНИЙ Василь Олексійович, Ісак Омелян Гаврилович
МПК: F02C 9/28, G06F 15/16
Мітки: силової, установки, система, параметрів, літального, реєстрації, контролю, апарата
Формула / Реферат:
Система контролю та реєстрації параметрів силової установки літального апарата, яка має блок нормалізаторів, першим виходом через послідовно з'єднані комутатор, аналого-цифровий перетворювач та операційний блок з'єднаний з першим входом блока обчислювача, другий вихід блока нормалізаторів через блок контролю датчиків з'єднаний з шинним формувачем та блоком автоматичного керування, другий вхід якого з'єднаний з третім виходом блока...
Багатоканальна система контролю параметрів газотурбінної установки
Номер патенту: 49036
Опубліковано: 16.09.2002
Автор: БЕЗСЧАСТНИЙ Василь Олексійович
МПК: F02C 9/00
Мітки: багатоканальна, параметрів, контролю, газотурбінної, установки, система
Формула / Реферат:
Багатоканальна система контролю параметрів газотурбінної установки, яка містить генератор еталонної частоти, елемент АБО, послідовно з'єднані блок формувачів, блок сигналізаторів та блок елементів І, який відрізняється тим, що додатково уведені блок комутації частоти, операційний блок, блок керованих узгоджуючих пристроїв, джерело напруги, блок компараторів, блок одновібраторів та блок конденсаторів входи якого з'єднані з вхідними ланцюгами...
Циліндричний зубчастий редуктор для приводу свердловинної штангової насосної установки

Номер патенту: 45634
Опубліковано: 15.04.2002
Автори: Панченко Вадим Олексійович, Чернявський Анатолій Миколайович, Бучинський Мирослав Яремович
МПК: F04B 47/02
Мітки: установки, насосної, свердловинної, штангової, редуктор, зубчастій, приводу, циліндричний
Формула / Реферат:
Циліндричний зубчастий редуктор для приводу свердловинної штангової насосної установки, що містить швидкохідний та тихохідний ступені, при наявності вхідного , проміжного та вихідного валів, з' єднаних за допомогою зубчастих передач, який відрізняється тим, що швидкохідний ступінь виконаний у вигляді роздвоєної планетарної зубчастої передачі типу 2к-h, причому вхідний вал-шестерня розміщений у порожнині проміжного пустотілого вала-шестерні, а...
Передавальний механізм для приводу свердловинної штангової насосної установки
Номер патенту: 43169
Опубліковано: 15.11.2001
Автори: Панченко Вадим Олексійович, Чернявський Анатолій Миколайович, Шахов Олександр Миколайович
МПК: F04B 49/02
Мітки: установки, штангової, механізм, свердловинної, насосної, приводу, передавальний
Формула / Реферат:
Передавальний механізм для приводу свердловинної штангової насосної установки, що складений з механізму перетворення обертового руху в зворотно-поступальний і механізму зміни кутової швидкості, який відрізняється тим, що між кривошипом механізму перетворення обертового руху в зворотно-поступальний і редуктором механізму зміни кутової швидкості створена обертова пара, шляхом насадження диска зубчастого, зафіксованого штифтом запобіжним, на...
Попередній патент: Тест-система на основі імуноферментного аналізу для прижиттєвої діагностики трихінельозу свиней
Наступний патент: Спосіб лікування ваннами із водорості
Випадковий патент: Електроємнісний інтроскоп для масиву гірських порід