Пристрій для перевантаження сільськогосподарських матеріалів із збиральної машини на транспортний контейнер
Номер патенту: 72437
Опубліковано: 15.03.2005
Автори: Сєбастьян Гамбле, Норберт Дікханс, Хрістоф Бусманн, Йохен Хустер
Формула / Реферат
1. Пристрій для перевантаження сільськогосподарських матеріалів із збиральної машини на транспортний контейнер з використанням поворотного перевантажувального пристрою, який відрізняється тим, що кут ![]() між поворотним перевантажувальним пристроєм і поздовжньою віссю збиральної машини виконаний регульованим в залежності від параметрів
між поворотним перевантажувальним пристроєм і поздовжньою віссю збиральної машини виконаний регульованим в залежності від параметрів ![]() які задають напрямок руху сільськогосподарській збиральній машині.
які задають напрямок руху сільськогосподарській збиральній машині.
2. Пристрій за п. 1, який відрізняється тим, що параметром, який задає напрямок руху сільськогосподарській збиральній машині, є кут повороту ![]() збиральної машини відносно центру шарнірного з'єднання сільськогосподарської збиральної машини з управлінням шарнірним з'єднанням.
збиральної машини відносно центру шарнірного з'єднання сільськогосподарської збиральної машини з управлінням шарнірним з'єднанням.
3. Пристрій за п. 1, який відрізняється тим, що параметром, який задає напрямок руху сільськогосподарській збиральній машині, є кут повороту ![]() сільськогосподарської збиральної машини з управлінням поворотною цапфою.
сільськогосподарської збиральної машини з управлінням поворотною цапфою.
4. Пристрій за будь-яким з пп. 1-3, який відрізняється тим, що напрямок перевантаження для перевантажувального пристрою розраховано або відрегульовано, виходячи з параметра, що задає напрямок руху сільськогосподарській збиральній машині на основі емпірично встановленого поля даних, які введені в електронну систему оцінювання.
5. Пристрій за будь-яким з пп. 1-3, який відрізняється тим, що напрямок перевантаження для перевантажувального пристрою розраховано або відрегульовано, виходячи з параметра, що задає напрямок руху сільськогосподарській збиральній машині на основі характеристичної кривої, яка введена в електронну систему оцінювання.
6. Пристрій за будь-яким з пп. 1-3, який відрізняється тим, що напрямок перевантаження для перевантажувального пристрою розраховано або відрегульовано, виходячи з параметра, який задає напрямок руху сільськогосподарській збиральній машині, і за допомогою щонайменше однієї заданої відстані (е) перевантаження.
7. Пристрій за п. 6, який відрізняється тим, що як задану відстань (е) перевантаження вибрано фіксований інтервал, який характерний для використованого виду транспортного засобу.
8. Пристрій за п. 6, який відрізняється тим, що як задану відстань (е) перевантаження вибрано відстань між центрами повороту перевантажувального пристрою і причіпним транспортним візком.
9. Пристрій за будь-яким з пп. 6-8, який відрізняється тим, що задана відстань (е) перевантаження розрахована, виходячи з положення елементів перевантажувального пристрою, які визначають відстань перевантаження.
10. Пристрій за будь-яким з пп. 6 або 9, який відрізняється тим, що задана відстань (е) перевантаження введена в електронну систему оцінювання.
11. Пристрій за будь-яким з пп.1-10, який відрізняється тим, що регулювання швидкості повороту перевантажувального пристрою виконано в автоматичному режимі.
12. Пристрій за п.11, який відрізняється тим, що перевантажувальний пристрій виконаний з можливістю повороту щонайменше за двома різними швидкостями.
13. Пристрій за будь-яким з пп. 6-12, який відрізняється тим, що задана відстань (е) перевантаження сільськогосподарської збиральної машини прийнята до уваги при регулюванні роботи перевантажувального пристрою.
14. Пристрій за будь-яким з пп. 11-13, який відрізняється тим, що регулювання швидкості повороту перевантажувального пристрою виконано залежним від швидкості руху сільськогосподарської збиральної машини.
15. Пристрій за будь-яким з пп. 1-14, який відрізняється тим, що відстань переміщення і параметр ![]() що задає напрямок руху сільськогосподарської збиральної машини, введені в пам'ять запам'ятовуючого пристрою на магнітних тороїдальних осердях.
що задає напрямок руху сільськогосподарської збиральної машини, введені в пам'ять запам'ятовуючого пристрою на магнітних тороїдальних осердях.
16. Пристрій за будь-яким з пп. 11-15, який відрізняється тим, що напрямок перевантаження для перевантажувального пристрою розрахований, виходячи зі значень, які введені в пам'ять запам'ятовуючого пристрою на магнітних тороїдальних осердях таким чином, що потік урожаю сільськогосподарських матеріалів надходить у транспортний контейнер по траєкторії в межах, позначених заданою відстанню (е) до точки перевантаження і його висотою.
17. Пристрій за будь-яким з пп. 1-16, який відрізняється тим, що він має вузол ручного коригування напрямку перевантаження.
18. Пристрій за будь-яким з пп. 1-17, який відрізняється тим, що він має клавішний пульт управління для вмикання установки, а також оптичний або акустичний сигнальний пристрій для забезпечення моніторингу виконуваних дій.
Текст
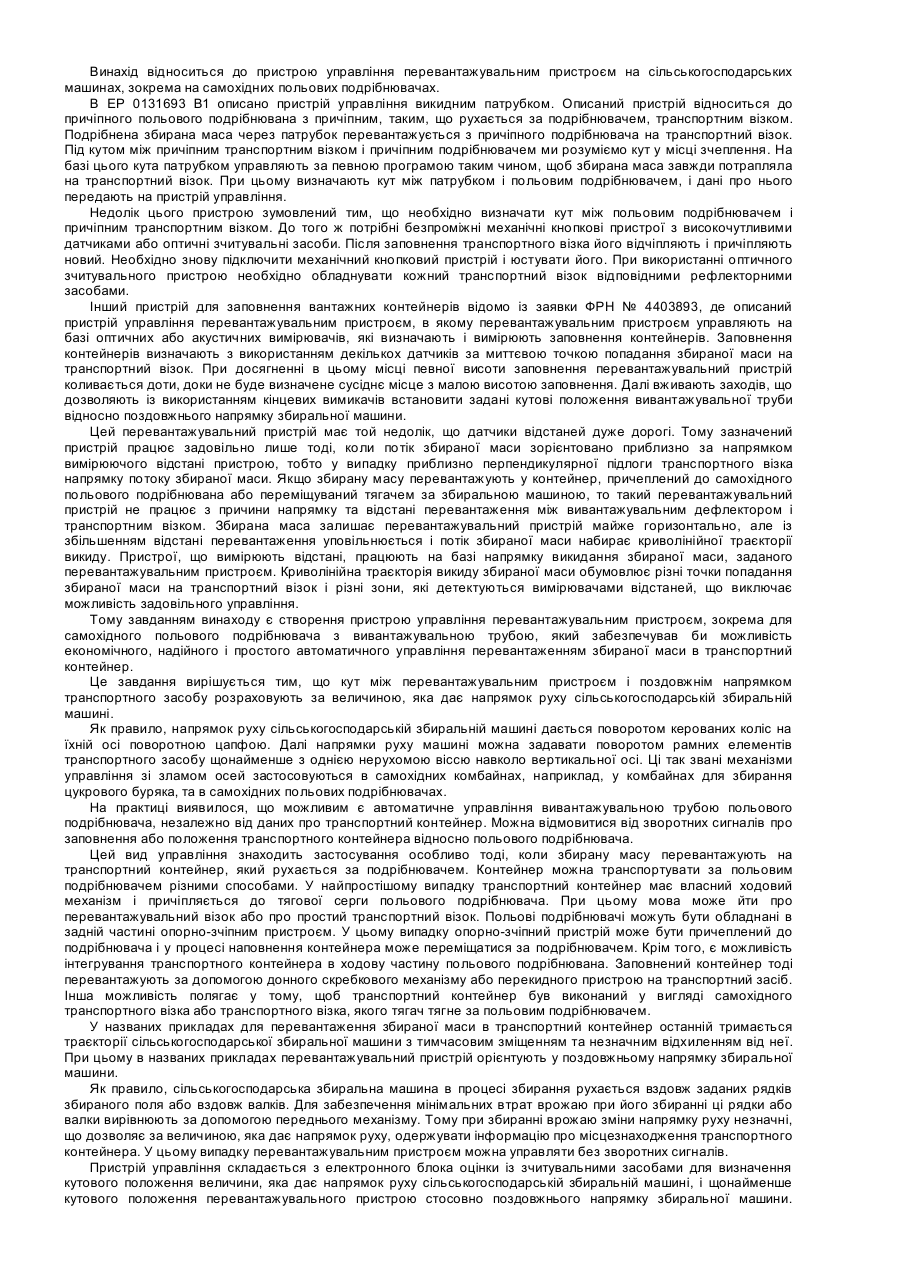
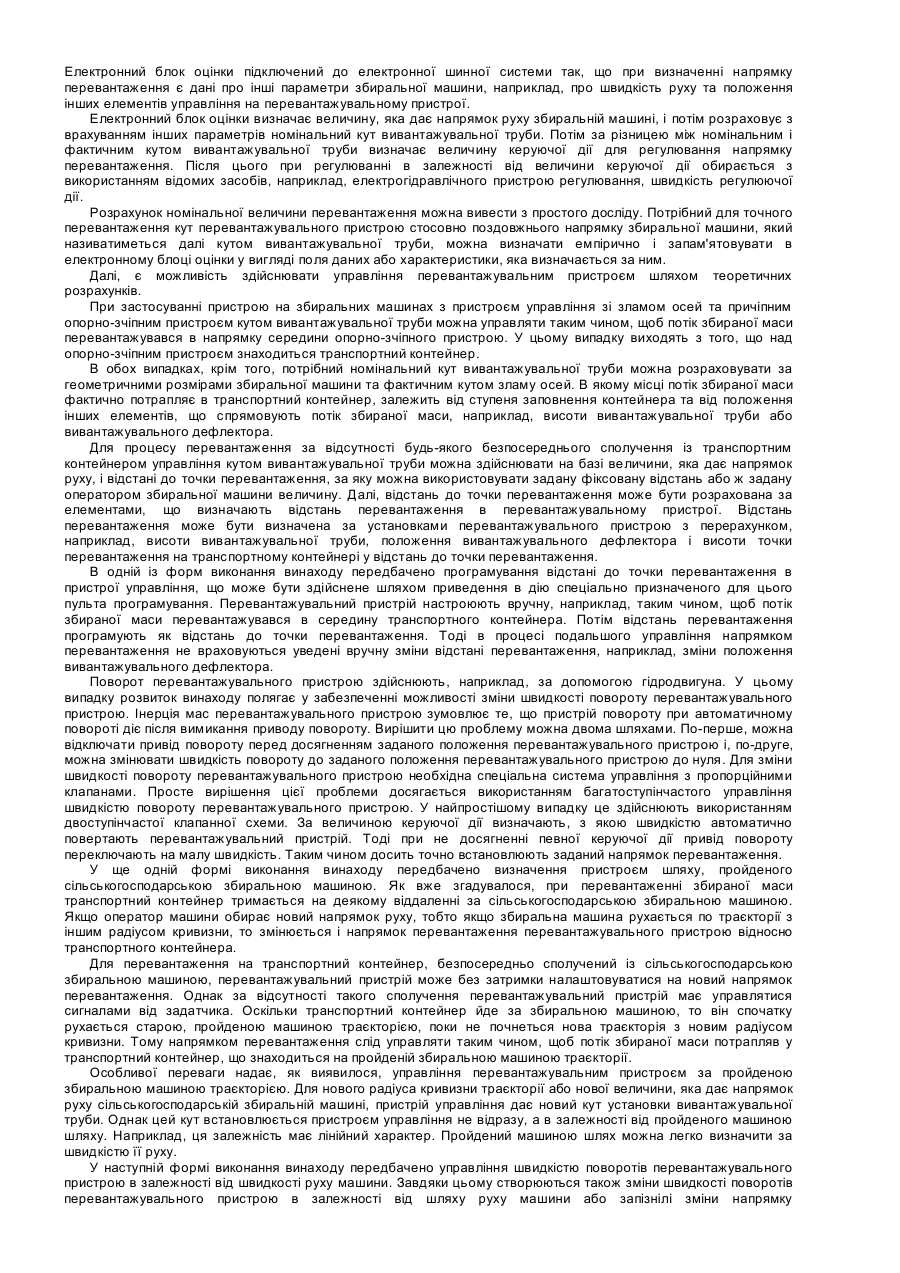
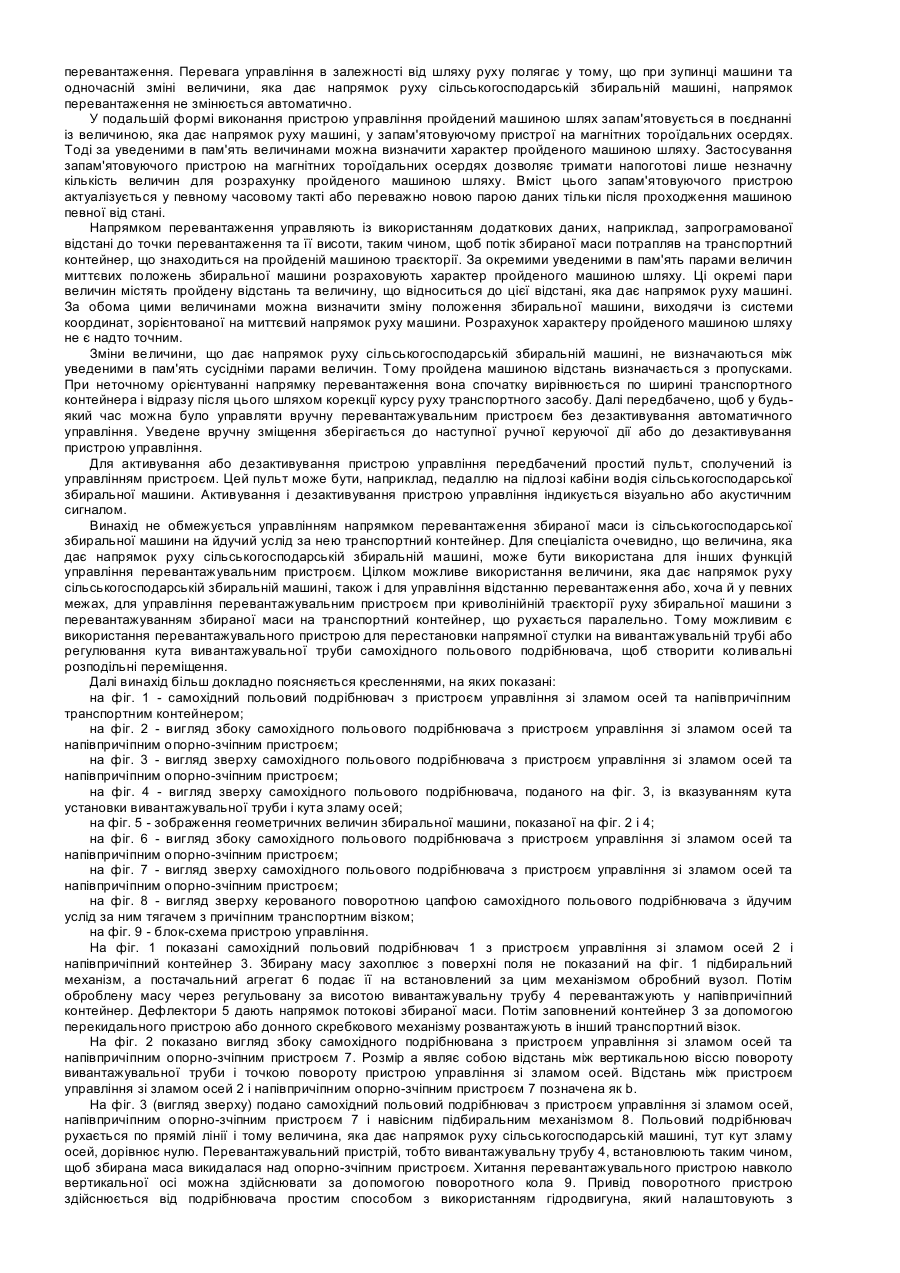
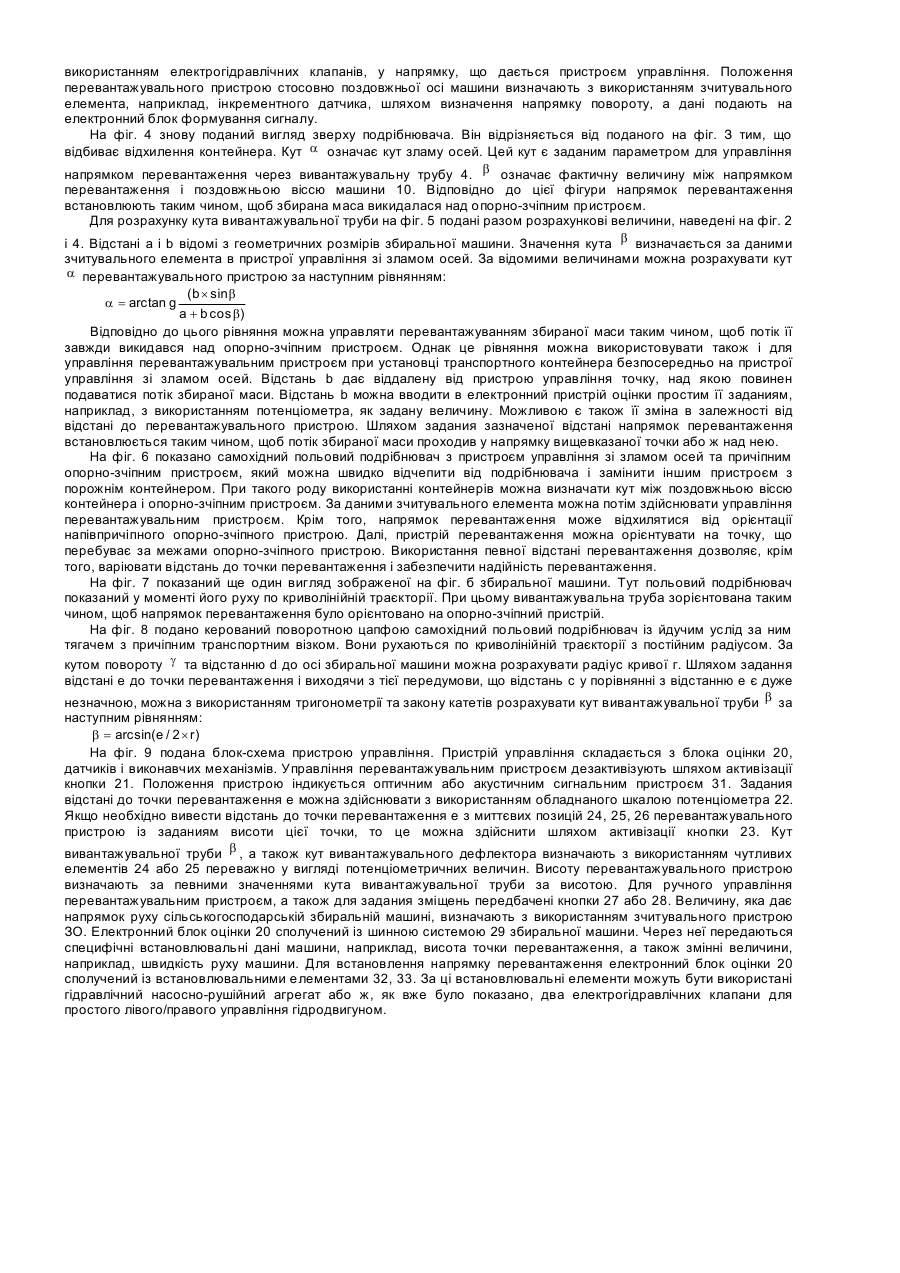
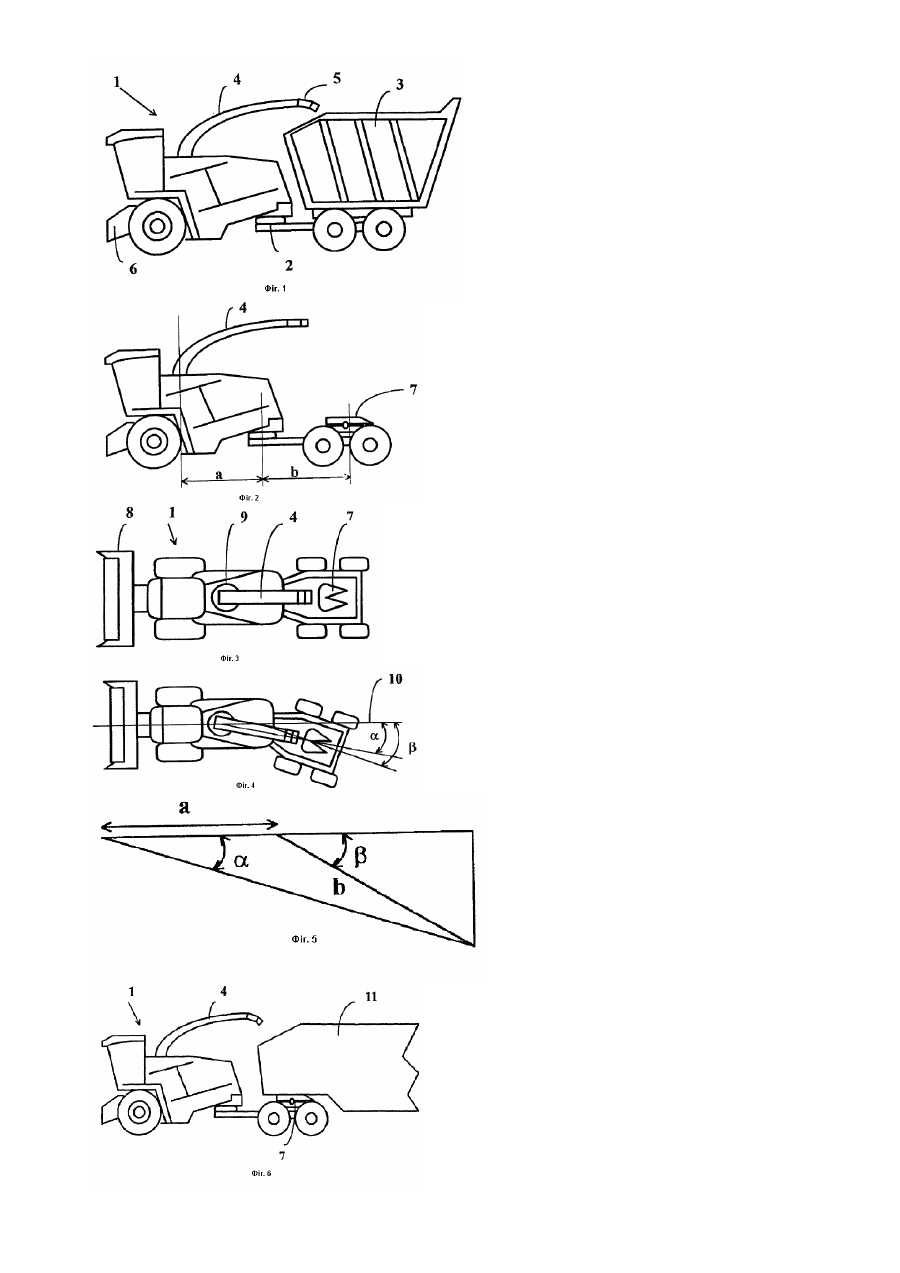
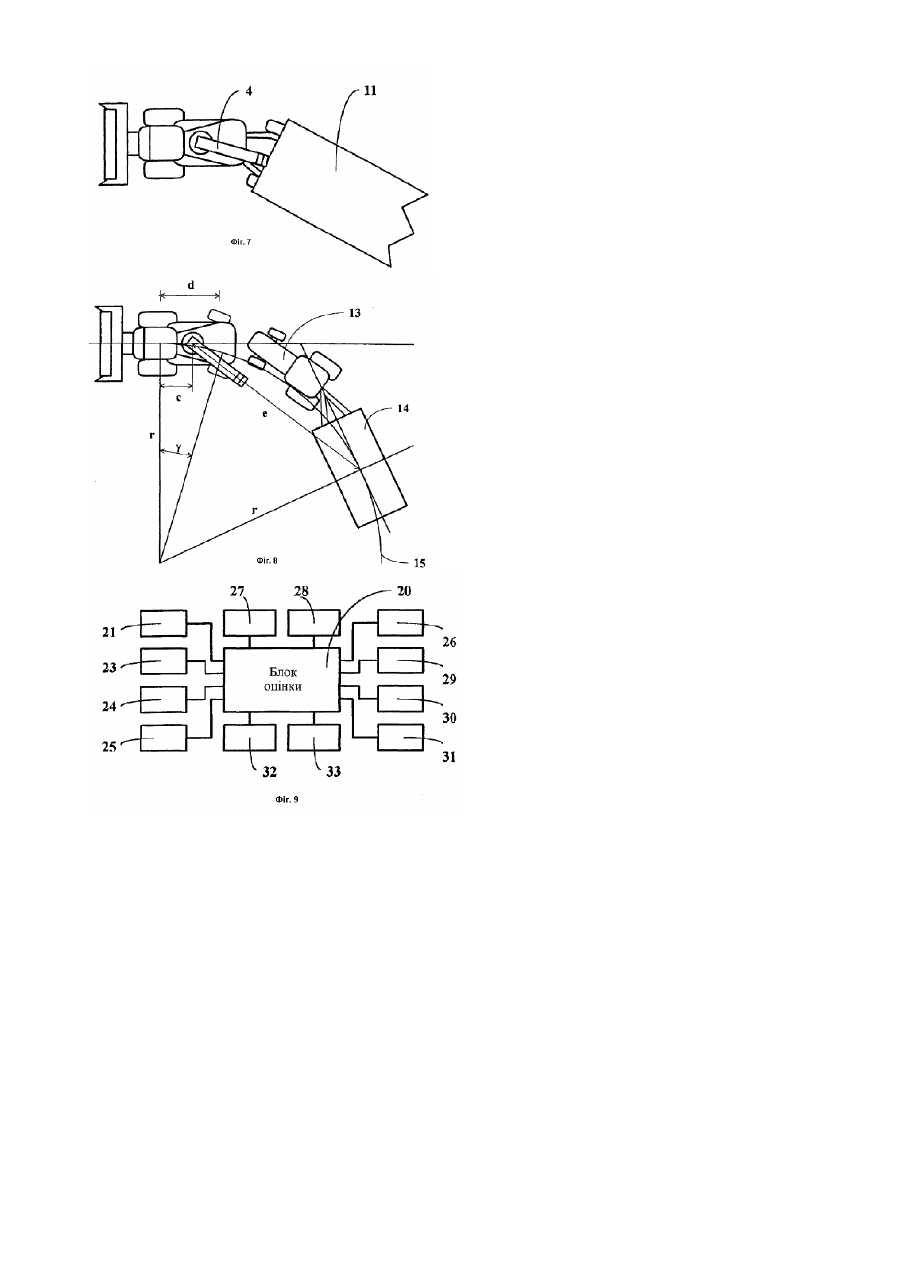
Винахід відноситься до пристрою управління перевантажувальним пристроєм на сільськогосподарських машинах, зокрема на самохідних польових подрібнювачах. В ЕР 0131693 В1 описано пристрій управління викидним патрубком. Описаний пристрій відноситься до причіпного польового подрібнювана з причіпним, таким, що рухається за подрібнювачем, транспортним візком. Подрібнена збирана маса через патрубок перевантажується з причіпного подрібнювача на транспортний візок. Під кутом між причіпним транспортним візком і причіпним подрібнювачем ми розуміємо кут у місці зчеплення. На базі цього кута патрубком управляють за певною програмою таким чином, щоб збирана маса завжди потрапляла на транспортний візок. При цьому визначають кут між патрубком і польовим подрібнювачем, і дані про нього передають на пристрій управління. Недолік цього пристрою зумовлений тим, що необхідно визначати кут між польовим подрібнювачем і причіпним транспортним візком. До того ж потрібні безпроміжні механічні кнопкові пристрої з високочутливими датчиками або оптичні зчитувальні засоби. Після заповнення транспортного візка його відчіпляють і причіпляють новий. Необхідно знову підключити механічний кнопковий пристрій і юстувати його. При використанні оптичного зчитувального пристрою необхідно обладнувати кожний транспортний візок відповідними рефлекторними засобами. Інший пристрій для заповнення вантажних контейнерів відомо із заявки ФРН № 4403893, де описаний пристрій управління перевантажувальним пристроєм, в якому перевантажувальним пристроєм управляють на базі оптичних або акустичних вимірювачів, які визначають і вимірюють заповнення контейнерів. Заповнення контейнерів визначають з використанням декількох датчиків за миттєвою точкою попадання збираної маси на транспортний візок. При досягненні в цьому місці певної висоти заповнення перевантажувальний пристрій коливається доти, доки не буде визначене сусіднє місце з малою висотою заповнення. Далі вживають заходів, що дозволяють із використанням кінцевих вимикачів встановити задані кутові положення вивантажувальної труби відносно поздовжнього напрямку збиральної машини. Цей перевантажувальний пристрій має той недолік, що датчики відстаней дуже дорогі. Тому зазначений пристрій працює задовільно лише тоді, коли потік збираної маси зорієнтовано приблизно за напрямком вимірюючого відстані пристрою, тобто у випадку приблизно перпендикулярної підлоги транспортного візка напрямку потоку збираної маси. Якщо збирану масу перевантажують у контейнер, причеплений до самохідного польового подрібнювана або переміщуваний тягачем за збиральною машиною, то такий перевантажувальний пристрій не працює з причини напрямку та відстані перевантаження між вивантажувальним дефлектором і транспортним візком. Збирана маса залишає перевантажувальний пристрій майже горизонтально, але із збільшенням відстані перевантаження уповільнюється і потік збираної маси набирає криволінійної траєкторії викиду. Пристрої, що вимірюють відстані, працюють на базі напрямку викидання збираної маси, заданого перевантажувальним пристроєм. Криволінійна траєкторія викиду збираної маси обумовлює різні точки попадання збираної маси на транспортний візок і різні зони, які детектуються вимірювачами відстаней, що виключає можливість задовільного управління. Тому завданням винаходу є створення пристрою управління перевантажувальним пристроєм, зокрема для самохідного польового подрібнювача з вивантажувальною трубою, який забезпечував би можливість економічного, надійного і простого автоматичного управління перевантаженням збираної маси в транспортний контейнер. Це завдання вирішується тим, що кут між перевантажувальним пристроєм і поздовжнім напрямком транспортного засобу розраховують за величиною, яка дає напрямок руху сільськогосподарській збиральній машині. Як правило, напрямок руху сільськогосподарській збиральній машині дається поворотом керованих коліс на їхній осі поворотною цапфою. Далі напрямки руху машині можна задавати поворотом рамних елементів транспортного засобу щонайменше з однією нерухомою віссю навколо вертикальної осі. Ці так звані механізми управління зі зламом осей застосовуються в самохідних комбайнах, наприклад, у комбайнах для збирання цукрового буряка, та в самохідних польових подрібнювачах. На практиці виявилося, що можливим є автоматичне управління вивантажувальною трубою польового подрібнювача, незалежно від даних про транспортний контейнер. Можна відмовитися від зворотних сигналів про заповнення або положення транспортного контейнера відносно польового подрібнювача. Цей вид управління знаходить застосування особливо тоді, коли збирану масу перевантажують на транспортний контейнер, який рухається за подрібнювачем. Контейнер можна транспортувати за польовим подрібнювачем різними способами. У найпростішому випадку транспортний контейнер має власний ходовий механізм і причіпляється до тягової серги польового подрібнювача. При цьому мова може йти про перевантажувальний візок або про простий транспортний візок. Польові подрібнювачі можуть бути обладнані в задній частині опорно-зчіпним пристроєм. У цьому випадку опорно-зчіпний пристрій може бути причеплений до подрібнювача і у процесі наповнення контейнера може переміщатися за подрібнювачем. Крім того, є можливість інтегрування транспортного контейнера в ходову частину польового подрібнювана. Заповнений контейнер тоді перевантажують за допомогою донного скребкового механізму або перекидного пристрою на транспортний засіб. Інша можливість полягає у тому, щоб транспортний контейнер був виконаний у вигляді самохідного транспортного візка або транспортного візка, якого тягач тягне за польовим подрібнювачем. У названих прикладах для перевантаження збираної маси в транспортний контейнер останній тримається траєкторії сільськогосподарської збиральної машини з тимчасовим зміщенням та незначним відхиленням від неї. При цьому в названих прикладах перевантажувальний пристрій орієнтують у поздовжньому напрямку збиральної машини. Як правило, сільськогосподарська збиральна машина в процесі збирання рухається вздовж заданих рядків збираного поля або вздовж валків. Для забезпечення мінімальних втрат врожаю при його збиранні ці рядки або валки вирівнюють за допомогою переднього механізму. Тому при збиранні врожаю зміни напрямку руху незначні, що дозволяє за величиною, яка дає напрямок руху, одержувати інформацію про місцезнаходження транспортного контейнера. У цьому випадку перевантажувальним пристроєм можна управляти без зворотних сигналів. Пристрій управління складається з електронного блока оцінки із зчитувальними засобами для визначення кутового положення величини, яка дає напрямок руху сільськогосподарській збиральній машині, і щонайменше кутового положення перевантажувального пристрою стосовно поздовжнього напрямку збиральної машини. Електронний блок оцінки підключений до електронної шинної системи так, що при визначенні напрямку перевантаження є дані про інші параметри збиральної машини, наприклад, про швидкість руху та положення інших елементів управління на перевантажувальному пристрої. Електронний блок оцінки визначає величину, яка дає напрямок руху збиральній машині, і потім розраховує з врахуванням інших параметрів номінальний кут вивантажувальної труби. Потім за різницею між номінальним і фактичним кутом вивантажувальної труби визначає величину керуючої дії для регулювання напрямку перевантаження. Після цього при регулюванні в залежності від величини керуючої дії обирається з використанням відомих засобів, наприклад, електрогідравлічного пристрою регулювання, швидкість регулюючої дії. Розрахунок номінальної величини перевантаження можна вивести з простого досліду. Потрібний для точного перевантаження кут перевантажувального пристрою стосовно поздовжнього напрямку збиральної машини, який називатиметься далі кутом вивантажувальної труби, можна визначати емпірично і запам'ятовувати в електронному блоці оцінки у вигляді поля даних або характеристики, яка визначається за ним. Далі, є можливість здійснювати управління перевантажувальним пристроєм шляхом теоретичних розрахунків. При застосуванні пристрою на збиральних машинах з пристроєм управління зі зламом осей та причіпним опорно-зчіпним пристроєм кутом вивантажувальної труби можна управляти таким чином, щоб потік збираної маси перевантажувався в напрямку середини опорно-зчіпного пристрою. У цьому випадку виходять з того, що над опорно-зчіпним пристроєм знаходиться транспортний контейнер. В обох випадках, крім того, потрібний номінальний кут вивантажувальної труби можна розраховувати за геометричними розмірами збиральної машини та фактичним кутом зламу осей. В якому місці потік збираної маси фактично потрапляє в транспортний контейнер, залежить від ступеня заповнення контейнера та від положення інших елементів, що спрямовують потік збираної маси, наприклад, висоти вивантажувальної труби або вивантажувального дефлектора. Для процесу перевантаження за відсутності будь-якого безпосереднього сполучення із транспортним контейнером управління кутом вивантажувальної труби можна здійснювати на базі величини, яка дає напрямок руху, і відстані до точки перевантаження, за яку можна використовувати задану фіксовану відстань або ж задану оператором збиральної машини величину. Далі, відстань до точки перевантаження може бути розрахована за елементами, що визначають відстань перевантаження в перевантажувальному пристрої. Відстань перевантаження може бути визначена за установками перевантажувального пристрою з перерахунком, наприклад, висоти вивантажувальної труби, положення вивантажувального дефлектора і висоти точки перевантаження на транспортному контейнері у відстань до точки перевантаження. В одній із форм виконання винаходу передбачено програмування відстані до точки перевантаження в пристрої управління, що може бути здійснене шляхом приведення в дію спеціально призначеного для цього пульта програмування. Перевантажувальний пристрій настроюють вручну, наприклад, таким чином, щоб потік збираної маси перевантажувався в середину транспортного контейнера. Потім відстань перевантаження програмують як відстань до точки перевантаження. Тоді в процесі подальшого управління напрямком перевантаження не враховуються уведені вручну зміни відстані перевантаження, наприклад, зміни положення вивантажувального дефлектора. Поворот перевантажувального пристрою здійснюють, наприклад, за допомогою гідродвигуна. У цьому випадку розвиток винаходу полягає у забезпеченні можливості зміни швидкості повороту перевантажувального пристрою. Інерція мас перевантажувального пристрою зумовлює те, що пристрій повороту при автоматичному повороті діє після вимикання приводу повороту. Вирішити цю проблему можна двома шляхами. По-перше, можна відключати привід повороту перед досягненням заданого положення перевантажувального пристрою і, по-друге, можна змінювати швидкість повороту до заданого положення перевантажувального пристрою до нуля. Для зміни швидкості повороту перевантажувального пристрою необхідна спеціальна система управління з пропорційними клапанами. Просте вирішення цієї проблеми досягається використанням багатоступінчастого управління швидкістю повороту перевантажувального пристрою. У найпростішому випадку це здійснюють використанням двоступінчастої клапанної схеми. За величиною керуючої дії визначають, з якою швидкістю автоматично повертають перевантажувальний пристрій. Тоді при не досягненні певної керуючої дії привід повороту переключають на малу швидкість. Таким чином досить точно встановлюють заданий напрямок перевантаження. У ще одній формі виконання винаходу передбачено визначення пристроєм шляху, пройденого сільськогосподарською збиральною машиною. Як вже згадувалося, при перевантаженні збираної маси транспортний контейнер тримається на деякому віддаленні за сільськогосподарською збиральною машиною. Якщо оператор машини обирає новий напрямок руху, тобто якщо збиральна машина рухається по траєкторії з іншим радіусом кривизни, то змінюється і напрямок перевантаження перевантажувального пристрою відносно транспортного контейнера. Для перевантаження на транспортний контейнер, безпосередньо сполучений із сільськогосподарською збиральною машиною, перевантажувальний пристрій може без затримки налаштовуватися на новий напрямок перевантаження. Однак за відсутності такого сполучення перевантажувальний пристрій має управлятися сигналами від задатчика. Оскільки транспортний контейнер йде за збиральною машиною, то він спочатку рухається старою, пройденою машиною траєкторією, поки не почнеться нова траєкторія з новим радіусом кривизни. Тому напрямком перевантаження слід управляти таким чином, щоб потік збираної маси потрапляв у транспортний контейнер, що знаходиться на пройденій збиральною машиною траєкторії. Особливої переваги надає, як виявилося, управління перевантажувальним пристроєм за пройденою збиральною машиною траєкторією. Для нового радіуса кривизни траєкторії або нової величини, яка дає напрямок руху сільськогосподарській збиральній машині, пристрій управління дає новий кут установки вивантажувальної труби. Однак цей кут встановлюється пристроєм управління не відразу, а в залежності від пройденого машиною шляху. Наприклад, ця залежність має лінійний характер. Пройдений машиною шлях можна легко визначити за швидкістю її руху. У наступній формі виконання винаходу передбачено управління швидкістю поворотів перевантажувального пристрою в залежності від швидкості руху машини. Завдяки цьому створюються також зміни швидкості поворотів перевантажувального пристрою в залежності від шляху руху машини або запізнілі зміни напрямку перевантаження. Перевага управління в залежності від шляху руху полягає у тому, що при зупинці машини та одночасній зміні величини, яка дає напрямок руху сільськогосподарській збиральній машині, напрямок перевантаження не змінюється автоматично. У подальшій формі виконання пристрою управління пройдений машиною шлях запам'ятовується в поєднанні із величиною, яка дає напрямок руху машині, у запам'ятовуючому пристрої на магнітних тороїдальних осердях. Тоді за уведеними в пам'ять величинами можна визначити характер пройденого машиною шляху. Застосування запам'ятовуючого пристрою на магнітних тороїдальних осердях дозволяє тримати напоготові лише незначну кількість величин для розрахунку пройденого машиною шляху. Вміст цього запам'ятовуючого пристрою актуалізується у певному часовому такті або переважно новою парою даних тільки після проходження машиною певної від стані. Напрямком перевантаження управляють із використанням додаткових даних, наприклад, запрограмованої відстані до точки перевантаження та її висоти, таким чином, щоб потік збираної маси потрапляв на транспортний контейнер, що знаходиться на пройденій машиною траєкторії. За окремими уведеними в пам'ять парами величин миттєвих положень збиральної машини розраховують характер пройденого машиною шляху. Ці окремі пари величин містять пройдену відстань та величину, що відноситься до цієї відстані, яка дає напрямок руху машині. За обома цими величинами можна визначити зміну положення збиральної машини, виходячи із системи координат, зорієнтованої на миттєвий напрямок руху машини. Розрахунок характеру пройденого машиною шляху не є надто точним. Зміни величини, що дає напрямок руху сільськогосподарській збиральній машині, не визначаються між уведеними в пам'ять сусідніми парами величин. Тому пройдена машиною відстань визначається з пропусками. При неточному орієнтуванні напрямку перевантаження вона спочатку вирівнюється по ширині транспортного контейнера і відразу після цього шляхом корекції курсу руху транспортного засобу. Далі передбачено, щоб у будьякий час можна було управляти вручну перевантажувальним пристроєм без дезактивування автоматичного управління. Уведене вручну зміщення зберігається до наступної ручної керуючої дії або до дезактивування пристрою управління. Для активування або дезактивування пристрою управління передбачений простий пульт, сполучений із управлінням пристроєм. Цей пульт може бути, наприклад, педаллю на підлозі кабіни водія сільськогосподарської збиральної машини. Активування і дезактивування пристрою управління індикується візуально або акустичним сигналом. Винахід не обмежується управлінням напрямком перевантаження збираної маси із сільськогосподарської збиральної машини на йдучий услід за нею транспортний контейнер. Для спеціаліста очевидно, що величина, яка дає напрямок руху сільськогосподарській збиральній машині, може бути використана для інших функцій управління перевантажувальним пристроєм. Цілком можливе використання величини, яка дає напрямок руху сільськогосподарській збиральній машині, також і для управління відстанню перевантаження або, хоча й у певних межах, для управління перевантажувальним пристроєм при криволінійній траєкторії руху збиральної машини з перевантажуванням збираної маси на транспортний контейнер, що рухається паралельно. Тому можливим є використання перевантажувального пристрою для перестановки напрямної стулки на вивантажувальній трубі або регулювання кута вивантажувальної труби самохідного польового подрібнювача, щоб створити коливальні розподільні переміщення. Далі винахід більш докладно поясняється кресленнями, на яких показані: на фіг. 1 - самохідний польовий подрібнювач з пристроєм управління зі зламом осей та напівпричіпним транспортним контейнером; на фіг. 2 - вигляд збоку самохідного польового подрібнювача з пристроєм управління зі зламом осей та напівпричіпним опорно-зчіпним пристроєм; на фіг. 3 - вигляд зверху самохідного польового подрібнювача з пристроєм управління зі зламом осей та напівпричіпним опорно-зчіпним пристроєм; на фіг. 4 - вигляд зверху самохідного польового подрібнювача, поданого на фіг. 3, із вказуванням кута установки вивантажувальної труби і кута зламу осей; на фіг. 5 - зображення геометричних величин збиральної машини, показаної на фіг. 2 і 4; на фіг. 6 - вигляд збоку самохідного польового подрібнювача з пристроєм управління зі зламом осей та напівпричіпним опорно-зчіпним пристроєм; на фіг. 7 - вигляд зверху самохідного польового подрібнювача з пристроєм управління зі зламом осей та напівпричіпним опорно-зчіпним пристроєм; на фіг. 8 - вигляд зверху керованого поворотною цапфою самохідного польового подрібнювача з йдучим услід за ним тягачем з причіпним транспортним візком; на фіг. 9 - блок-схема пристрою управління. На фіг. 1 показані самохідний польовий подрібнювач 1 з пристроєм управління зі зламом осей 2 і напівпричіпний контейнер 3. Збирану масу захоплює з поверхні поля не показаний на фіг. 1 підбиральний механізм, а постачальний агрегат 6 подає її на встановлений за цим механізмом обробний вузол. Потім оброблену масу через регульовану за висотою вивантажувальну трубу 4 перевантажують у напівпричіпний контейнер. Дефлектори 5 дають напрямок потокові збираної маси. Потім заповнений контейнер 3 за допомогою перекидального пристрою або донного скребкового механізму розвантажують в інший транспортний візок. На фіг. 2 показано вигляд збоку самохідного подрібнювана з пристроєм управління зі зламом осей та напівпричіпним опорно-зчіпним пристроєм 7. Розмір а являє собою відстань між вертикальною віссю повороту вивантажувальної труби і точкою повороту пристрою управління зі зламом осей. Відстань між пристроєм управління зі зламом осей 2 і напівпричіпним опорно-зчіпним пристроєм 7 позначена як b. На фіг. 3 (вигляд зверху) подано самохідний польовий подрібнювач з пристроєм управління зі зламом осей, напівпричіпним опорно-зчіпним пристроєм 7 і навісним підбиральним механізмом 8. Польовий подрібнювач рухається по прямій лінії і тому величина, яка дає напрямок руху сільськогосподарській машині, тут кут зламу осей, дорівнює нулю. Перевантажувальний пристрій, тобто вивантажувальну трубу 4, встановлюють таким чином, щоб збирана маса викидалася над опорно-зчіпним пристроєм. Хитання перевантажувального пристрою навколо вертикальної осі можна здійснювати за допомогою поворотного кола 9. Привід поворотного пристрою здійснюється від подрібнювача простим способом з використанням гідродвигуна, який налаштовують з використанням електрогідравлічних клапанів, у напрямку, що дається пристроєм управління. Положення перевантажувального пристрою стосовно поздовжньої осі машини визначають з використанням зчитувального елемента, наприклад, інкрементного датчика, шляхом визначення напрямку повороту, а дані подають на електронний блок формування сигналу. На фіг. 4 знову поданий вигляд зверху подрібнювача. Він відрізняється від поданого на фіг. З тим, що відбиває відхилення контейнера. Кут a означає кут зламу осей. Цей кут є заданим параметром для управління напрямком перевантаження через вивантажувальну трубу 4. b означає фактичну величину між напрямком перевантаження і поздовжньою віссю машини 10. Відповідно до цієї фігури напрямок перевантаження встановлюють таким чином, щоб збирана маса викидалася над опорно-зчіпним пристроєм. Для розрахунку кута вивантажувальної труби на фіг. 5 подані разом розрахункові величини, наведені на фіг. 2 і 4. Відстані а і b відомі з геометричних розмірів збиральної машини. Значення кута b визначається за даними зчитувального елемента в пристрої управління зі зламом осей. За відомими величинами можна розрахувати кут a перевантажувального пристрою за наступним рівнянням: ( b ´ sinb a = arctan g a + b cos b) Відповідно до цього рівняння можна управляти перевантажуванням збираної маси таким чином, щоб потік її завжди викидався над опорно-зчіпним пристроєм. Однак це рівняння можна використовувати також і для управління перевантажувальним пристроєм при установці транспортного контейнера безпосередньо на пристрої управління зі зламом осей. Відстань b дає віддалену від пристрою управління точку, над якою повинен подаватися потік збираної маси. Відстань b можна вводити в електронний пристрій оцінки простим її заданиям, наприклад, з використанням потенціометра, як задану величину. Можливою є також її зміна в залежності від відстані до перевантажувального пристрою. Шляхом задания зазначеної відстані напрямок перевантаження встановлюється таким чином, щоб потік збираної маси проходив у напрямку вищевказаної точки або ж над нею. На фіг. 6 показано самохідний польовий подрібнювач з пристроєм управління зі зламом осей та причіпним опорно-зчіпним пристроєм, який можна швидко відчепити від подрібнювача і замінити іншим пристроєм з порожнім контейнером. При такого роду використанні контейнерів можна визначати кут між поздовжньою віссю контейнера і опорно-зчіпним пристроєм. За даними зчитувального елемента можна потім здійснювати управління перевантажувальним пристроєм. Крім того, напрямок перевантаження може відхилятися від орієнтації напівпричіпного опорно-зчіпного пристрою. Далі, пристрій перевантаження можна орієнтувати на точку, що перебуває за межами опорно-зчіпного пристрою. Використання певної відстані перевантаження дозволяє, крім того, варіювати відстань до точки перевантаження і забезпечити надійність перевантаження. На фіг. 7 показаний ще один вигляд зображеної на фіг. б збиральної машини. Тут польовий подрібнювач показаний у моменті його руху по криволінійній траєкторії. При цьому вивантажувальна труба зорієнтована таким чином, щоб напрямок перевантаження було орієнтовано на опорно-зчіпний пристрій. На фіг. 8 подано керований поворотною цапфою самохідний польовий подрібнювач із йдучим услід за ним тягачем з причіпним транспортним візком. Вони рухаються по криволінійній траєкторії з постійним радіусом. За кутом повороту g та відстанню d до осі збиральної машини можна розрахувати радіус кривої г. Шляхом задання відстані е до точки перевантаження і виходячи з тієї передумови, що відстань с у порівнянні з відстанню е є дуже незначною, можна з використанням тригонометрії та закону катетів розрахувати кут вивантажувальної труби b за наступним рівнянням: b = arcsin(e / 2 ´ r ) На фіг. 9 подана блок-схема пристрою управління. Пристрій управління складається з блока оцінки 20, датчиків і виконавчих механізмів. Управління перевантажувальним пристроєм дезактивізують шляхом активізації кнопки 21. Положення пристрою індикується оптичним або акустичним сигнальним пристроєм 31. Задания відстані до точки перевантаження е можна здійснювати з використанням обладнаного шкалою потенціометра 22. Якщо необхідно вивести відстань до точки перевантаження е з миттєвих позицій 24, 25, 26 перевантажувального пристрою із заданиям висоти цієї точки, то це можна здійснити шляхом активізації кнопки 23. Кут вивантажувальної труби b , а також кут вивантажувального дефлектора визначають з використанням чутливих елементів 24 або 25 переважно у вигляді потенціометричних величин. Висоту перевантажувального пристрою визначають за певними значеннями кута вивантажувальної труби за висотою. Для ручного управління перевантажувальним пристроєм, а також для задания зміщень передбачені кнопки 27 або 28. Величину, яка дає напрямок руху сільськогосподарській збиральній машині, визначають з використанням зчитувального пристрою ЗО. Електронний блок оцінки 20 сполучений із шинною системою 29 збиральної машини. Через неї передаються специфічні встановлювальні дані машини, наприклад, висота точки перевантаження, а також змінні величини, наприклад, швидкість руху машини. Для встановлення напрямку перевантаження електронний блок оцінки 20 сполучений із встановлювальними елементами 32, 33. За ці встановлювальні елементи можуть бути використані гідравлічний насосно-рушійний агрегат або ж, як вже було показано, два електрогідравлічних клапани для простого лівого/правого управління гідродвигуном.
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for loading agricultural materials from a harvester into a shipping container
Назва патенту російськоюУстройство для перегрузки сельскохозяйственных материалов с уборочной машины в транспортный контейнер
МПК / Мітки
МПК: A01D 34/00
Мітки: збиральної, матеріалів, машини, транспортний, пристрій, перевантаження, контейнер, сільськогосподарських
Код посилання
<a href="https://ua.patents.su/6-72437-pristrijj-dlya-perevantazhennya-silskogospodarskikh-materialiv-iz-zbiralno-mashini-na-transportnijj-kontejjner.html" target="_blank" rel="follow" title="База патентів України">Пристрій для перевантаження сільськогосподарських матеріалів із збиральної машини на транспортний контейнер</a>
Ексцентрикове мотовило збиральної машини
Номер патенту: 52088
Опубліковано: 16.12.2002
Автори: Кумпан Віктор Карпович, Матвієнко Микола Васильович, Павлик Володимир Іванович, Федосов Василь Миколайович, Агапов Микола Дмитрович
МПК: A01D 57/00
Мітки: ексцентрикове, машини, збиральної, мотовило
Формула / Реферат:
Ексцентрикове мотовило збиральної машини, що складається з вала з нерухомо встановленими на ньому променями, на кінцях яких установлені з можливістю обертання граблини, які мають зубці з робочою частиною і нерухомо закріплені на кінцях граблин кривошипи, шатуни, одним кінцем шарнірно з'єднані з кривошипами, а іншим кінцем з'єднані з кільцем, встановленим на напрямних роликах із можливістю обертання, вісь якого ексцентрично зміщена відносно...
Спосіб захисту робочих органів збиральної машини при попаданні сторонніх предметів та пристрій для його здійснення
Номер патенту: 24683
Опубліковано: 04.08.1998
Автори: Нєдовєсов Віктор Іванович, Борошок Лев Абрамович
МПК: A01D 75/00
Мітки: попаданні, спосіб, здійснення, збиральної, пристрій, предметів, захисту, органів, машини, робочих, сторонніх
Формула / Реферат:
1. Спосіб захисту робочих органів збиральної машини при попаданні сторонніх предметів, в якому визначають наявність стороннього аварійнонебезпечного предмета в рослинній масі, яка подається до технологічних переробляючих робочих органів, після чого зупиняють подаючий механізм, який відрізняється тим, що вимірюють механічні коливання по всій поверхні платформи зрізаючого чи підбираючого механізма і по параметрам цих коливань судять про те, що...
Спосіб захисту електричної машини від струмового перевантаження
Номер патенту: 33607
Опубліковано: 15.05.2002
Автор: Бергал Михайло Юхимович
МПК: H02H 3/08, H02H 7/085
Мітки: захисту, перевантаження, спосіб, машини, електричної, струмового
Формула / Реферат:
Спосіб захисту електричної машини від струмового перевантаження, заснований на вимірі тривалості її імпульсу, порівнянні з заданою величиною і вимкненні електричної машини у момент їх збігу, який відрізняється тим, що при виникненні імпульсу струмового перевантаження тривалістю менше заданої величини його тривалість підсумовують із тривалістю наступних імпульсів, а результат підсумовування порівнюють із заданою величиною, при цьому задають...
Пристрій для підведення електроенергії з неповоротної частини машини на поворотну
Номер патенту: 70339
Опубліковано: 15.10.2004
Автори: Кобиш Ольга Миколаївна, Фабішевський Валентин Костянтинович, Вільянінов Микола Іванович
МПК: H02G 11/00
Мітки: підведення, поворотну, машини, частини, електроенергії, неповоротної, пристрій
Формула / Реферат:
Пристрій для підведення електроенергії з неповоротної частини машини на поворотну, що містить струмонесучі гнучкі кабелі, що зв'язані з неповоротною та поворотною частинами машини, опору, змонтовану на поворотній частині, який відрізняється тим, що опора виконана центруючою, а струмонесучі гнучкі кабелі послідовно закріплені в жолобах перевантажувального візка, стійки, каретки, рамки і підвішені до тросового підвісу, розташованого вздовж...
Підіймач колосків для косильної системи збиральної машини

Номер патенту: 71990
Опубліковано: 17.01.2005
Автори: Шумахер Густав, Шумахер Фрідріх-Вільгельм
МПК: A01D 65/00
Мітки: системі, колосків, збиральної, косильної, підіймач, машини
Формула / Реферат:
1. Підіймач колосків для косильної системи збиральної машини, який має косильний брус із виступаючими від нього косильними пальцями, включаючи гнучку несучу рейку з першим кінцем та другим кінцем, причому перший кінець служить для закріплення на косильному брусі, підіймач стебел, з'єднаний з другим кінцем несучої рейки, тримач, який має виступаючі від повернутої до підіймача стебел поверхні несучої рейки ніжки, які служать для того, щоб між...