Спосіб точного визначення місця розташування об’єкта, переважно транспортного засобу, що рухається відомим маршрутом
Формула / Реферат
1. Спосіб визначення місця розташування і/або позиціювання об'єкта, зокрема транспортного засобу, такого як поїзд, що рухається за відомим маршрутом, особливо стосовно залізничного транспорту, який відрізняється тим, що згадане визначення місця розташування і/або згадане позиціювання згаданого об'єкта здійснюють за допомогою точних розрахунків, виконаних у конкретний момент часу, заснованих, з одного боку, на первинних вимірах, з використанням принаймні одного супутника, і, з іншого боку, на точній картографії згаданого відомого маршруту, причому первинний вимір (і) полягає у визначенні індивідуальної ділянки (Di) між двома точками (Mimin і Mimax), яка розташована на згаданому маршруті і залежить від стандартного відхилення ![]() похибки виміру часу згаданого первинного виміру (і), швидкості (с) світла, коефіцієнта
похибки виміру часу згаданого первинного виміру (і), швидкості (с) світла, коефіцієнта ![]() , який залежить від координат згаданого розглянутого супутника і маршруту, а також від коефіцієнта
, який залежить від координат згаданого розглянутого супутника і маршруту, а також від коефіцієнта ![]() , який визначає геометрію розподілу помилок будь-якого запису виміру таким чином, щоб імовірність (Pi) відсутності поїзда на згаданій індивідуальній ділянці дорівнювала попередньо заданій.
, який визначає геометрію розподілу помилок будь-якого запису виміру таким чином, щоб імовірність (Pi) відсутності поїзда на згаданій індивідуальній ділянці дорівнювала попередньо заданій.
2. Спосіб за пунктом 1, який відрізняється тим, що за допомогою точної картографії одержують два рівняння з трьома невідомими, які являють собою координати згаданого об'єкта, чиє місце розташування і/або позиціювання потрібно встановити, у той час як хоча б ще одне рівняння між цими ж трьома невідомими одержують за допомогою інформації, переданої щонайменше одним супутником, чиє місце розташування відоме.
3. Спосіб за будь-яким із попередніх пунктів, який відрізняється тим, що запис первинного виміру дублюють.
4. Спосіб за пунктом 3, який відрізняється тим, що велику кількість індивідуальних ділянок (Di) визначають за допомогою великої кількості записів первинних вимірів (і), виконаних одночасно, у той же самий заданий час, і заснованих на використанні сигналів різних супутників або пари різних супутників.
5. Спосіб за пунктом 4, який відрізняється тим, що для одночасного запису великої кількості первинних вимірів застосовують більшу кількість супутників.
6. Спосіб за пунктом 4 або 5, який відрізняється тим, що визначають загальну ділянку (D0) як перетинання різних, переважно всіх, індивідуальних ділянок (Di).
7. Спосіб за пунктом 6, який відрізняється тим, що індивідуальні ділянки (Di), що не мають загальних точок із загальною ділянкою (D0), виключають.
8. Спосіб за пунктом 6 або 7, який відрізняється тим, що, якщо існує не нульова загальна ділянка (D0), ділянку (Du), що є об'єднанням невиключених індивідуальних ділянок, визначають як ділянку можливої присутності об'єкта.
9. Спосіб за пунктом 8, який відрізняється тим, що імовірність відсутності об'єкта на об'єднаній ділянці (Du) визначають як добуток імовірностей відсутності об'єкта на відомих індивідуальних ділянках (Di).
10. Спосіб за пунктом 8 або 9, який відрізняється тим, що індивідуальні ділянки (Dib), що визначають об'єднану ділянку (Du), залежать від параметра ![]() , який визначає геометрію розподілу помилок, який є більшим або дорівнює параметру
, який визначає геометрію розподілу помилок, який є більшим або дорівнює параметру ![]() , вибраному для завдання індивідуальних ділянок (Dia), які визначають загальну ділянку (D0).
, вибраному для завдання індивідуальних ділянок (Dia), які визначають загальну ділянку (D0).
11. Спосіб за будь-яким із попередніх пунктів, який відрізняється тим, що первинний вимір здійснюють за допомогою щонайменше однієї пари супутників, які використовують одну й ту ж саму систему відліку часу.
12. Спосіб за пунктом 11, який відрізняється тим, що пара супутників, використовуваних при первинному вимірі, належить до однієї ж групи.
13. Спосіб за будь-яким із пунктів 1-9, який відрізняється тим, що первинний вимір виконують за допомогою щонайменше одного супутника, який належить до групи, і приймача, встановленого на об'єкті, що рухається за відомим маршрутом, причому згаданий приймач має годинники, синхронізовані із системою відліку часу в групі, до якої належить супутник.
14. Пристрій для визначення місця розташування і/або позиціювання об'єкта, переважно транспортного засобу, подібного до поїзда, що рухається за відомим маршрутом, особливо стосовно залізничного транспорту, який включає щонайменше:
- устаткування, зв'язане зі згаданим об'єктом, причому згадане устаткування містить щонайменше один центральний комп'ютер, щонайменше один приймач/декодер сигналів, які надходять від одного або більше супутників, інтерфейс радіозв'язку і базу даних, яка містить картографію маршруту руху вищезгаданого об'єкта;
- центральне устаткування, яке включає центральний комп'ютер, один або більше інтерфейсів радіозв'язку, систему шин передачі даних, базу даних, яка містить картографію маршруту, програму, що дозволяє вносити зміни у вищезгадану картографію, і хоча б одну консоль, а також елементи інтерфейсів об'єкт/центральне устаткування і людина/об'єкт, що переміщується.
15. Пристрій за пунктом 14, який відрізняється тим, що у приймачі/декодері передбачений годинник, синхронізований із системою відліку часу групи супутників.
16. Пристрій за пунктом 14 або 15, який містить також велику кількість додаткових датчиків.
17. Пристрій за будь-яким із пунктів 14-16, який відрізняється тим, що центральне устаткування може бути портативним.
Текст
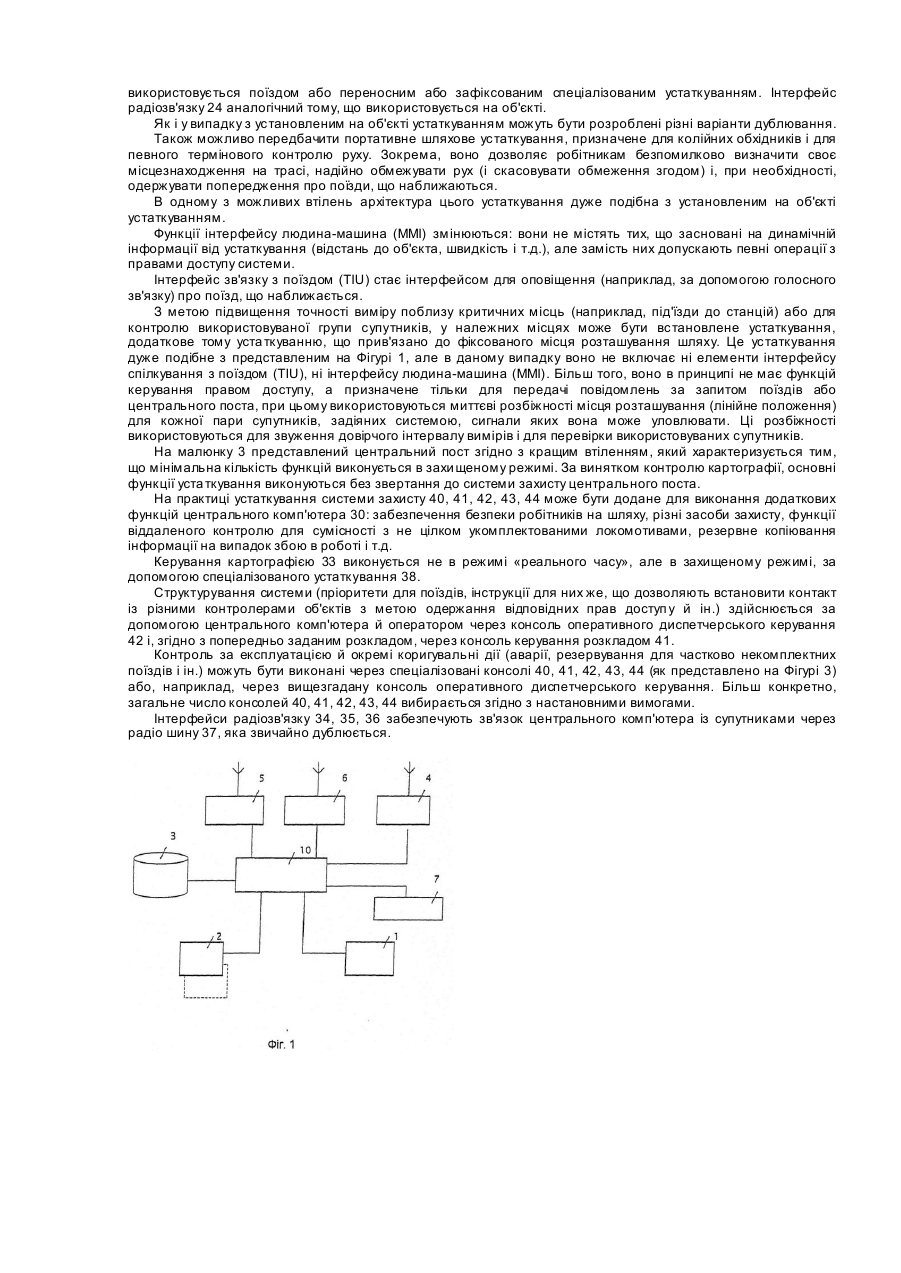
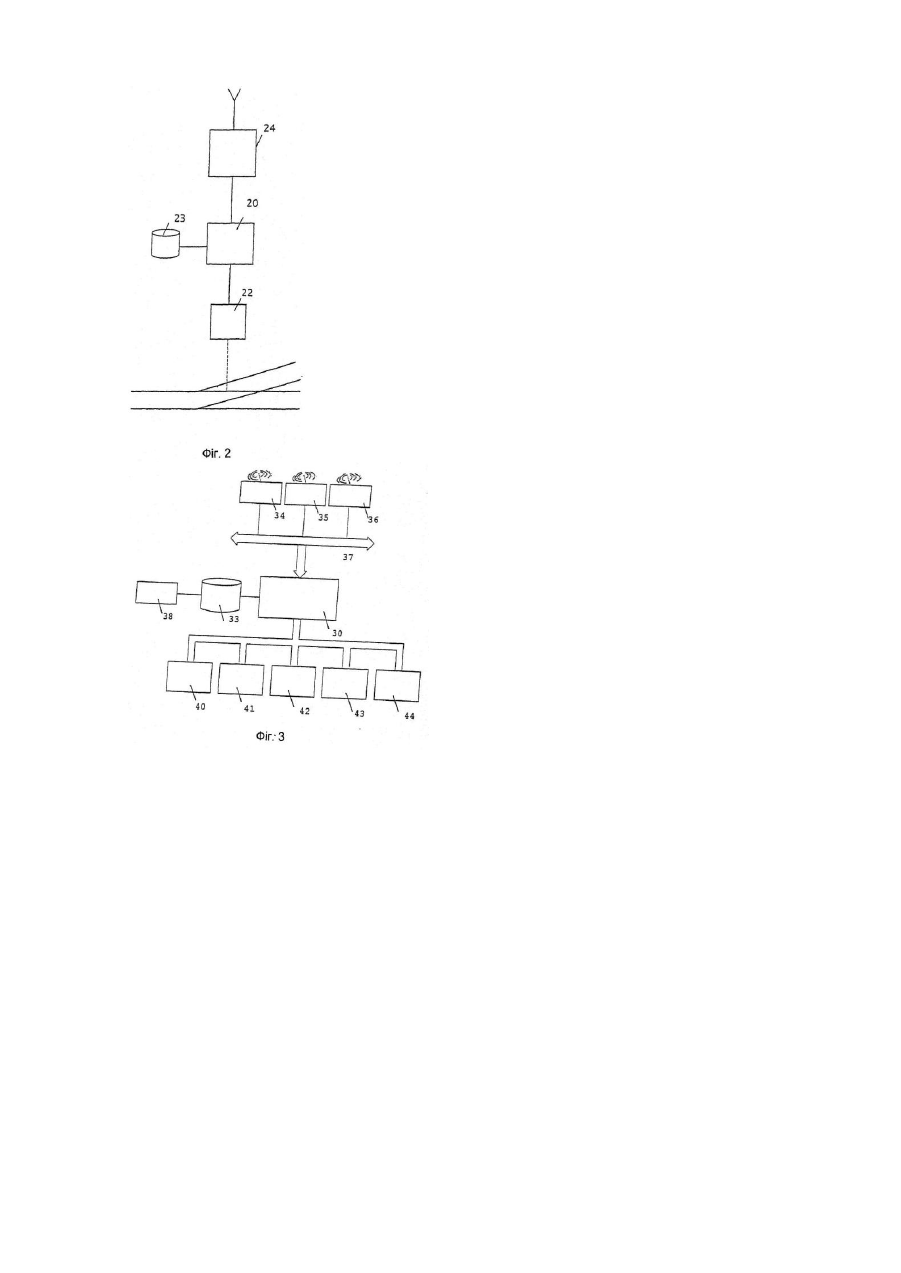
Даний винахід стосується способу точного визначення місця розташування і/або позиціювання об'єкта, який рухається по трасі, яка визначається за допомогою спеціального пристрою. Мається на увазі, що термін «траса» означає область простору, обмежену трубчастою поверхнею довільного і змінного поперечного перерізу, яка строго задає границі, всередині яких відбувається рух транспортного засобу. Якщо поперечним перерізом цієї труби можна знехтувати, то одержуємо два рівняння, які зв'язують довготу, широту і висоту об'єкта, що р ухається. Більш конкретно, даний винахід стосується способу визначення місця розташування поїзда, який рухається по залізничній колії, точний маршрут якого відомий. Цей же принцип може бути застосований, коли відоме одне рівняння (рух об'єкта по : відомій поверхні). Даний винахід стосується способу визначення місця розташування і/або позиціювання транспортного засобу, особливо стосовно залізничного транспорту, тобто спосіб дозволяє майже миттєво визначити місце розташування транспортного засобу, або більш точно - області відсутності вищезгаданого транспортного засобу, що р ухається за відомим маршрутом, з певним ступенем імовірності. Визначення місця розташування базується на використанні навігаційних супутників або аналогічних наземних навігаційних маяків, надалі називаних загальним терміном «супутники». Система залізничної сигналізації забороняє поїзду вхід на певну ділянку шля ху доти, поки не буде встановлено, що поїзд, який іде попереду, залишив дану ділянку, тобто, що розглянута ділянка шляху вільна. Це необхідно встановити із заздалегідь заданим дуже малим значенням погрішності, і особливо точно по відношенню до залізничного транспорту; наприклад ділянки, на яких передбачається відсутність поїзда, необхідно визначати з максимальним значенням погрішності порядку 10-9, переважно порядку 10-12, на кожному кроці обчислення. Відомий спосіб точного визначення місця розташування об'єкта, і особливо поїзда, за допомогою розрахунку місцезнаходження за сигналами трьох супутників, причому приймачі, які можуть приймати інформацію від вищезгаданих суп утників, здатні розрахувати координати вищезгаданого об'єкта, що рухається, з відносно високою точністю. Однак при цьому необхідний точний вимір часу за Гринвічем, що досить складно і дорого для виконання на рівні приймача, наприклад розміщеного на поїзді. Більш того, необхідно, щоб різні супутники належали до однієї групи і для них використовувалася єдина система відліку часу. Таким чином, звичайно використовується четвертий супутник, який дозволяє точно визначити місце розташування розглянутого об'єкта шляхом рішення системи з чотирьох рівнянь з чотирма невідомими для одержання трьох координат розглянутої точки і значення часу. В дійсності, на основі знання координат цих супутників, здійснюється розрахунок відстані між вищезгаданими супутниками і приймачем об'єкта, чиє місце розташування передбачається визначити. Численні технології підвищення якості і/або збільшення кількості використовуваної інформації, як у цивільних так і у військових областях, дозволили підвищити точність цих вимірів. У зв'язку з цим, серед іншого, може бути згадане таке: збільшення кількості супутників, зайнятих у вимірюванні (включаючи такі, що знаходяться на землі); кореляція між послідовними вимірами з метою зниження властивої ваги певних причин помилок; радіопередача (через супутник або інший спосіб) інформації про місцеві виправлення (наприклад, про диференціальні виправлення сигналів глобальної системи позиціювання, переданих за допомогою DGPS (скор, від Differential Global Positionong System - диференційна система глобального позиціювання - прим, перекладача), WAAS (скор, від Wide Area Augmentation System – система наведення для великої площі перекриття - прим, перекладача); підвищення точності вимірів тимчасових інтервалів за допомогою синхронізації із супутниками; використання експлуатаційної і контрольної інформації, переданої наземними слідкувальними мережами або мережами груп супутників. З метою максимального уточнення найбільш ймовірного місцезнаходження цікавлячого нас об'єкта і підвищення точності визначення його місцезнаходження накопичуються різні види інформації. Більш того, для надійного захисту від електромагнітних перешкод або зловмисних дій, можливих під час проведення вимірів, додатково пропонуються кодування і метод автокореляції. Останнім часом, у деяких випадках, суп утникові системи місцезнаходження можуть бути постачені додатковими датчиками, які ще більш збільшують кількість і якість доступної інформації, наприклад, датчики атмосферного тиску в аеронавтиці, датчики осі обертання поїзда, об'єднані з доплеровскими радарами, частково або цілком інерціальні станції і т.д. Таким чином, ціллю даного винаходу є запропонувати спосіб і пристрій, які забезпечують точне визначення місця розташування і/або позиціювання об'єкта, особливо транспортного засобу, такого як поїзд, що р ухається за відомим маршрутом. Мається на увазі, що термін точне визначення місця розташування означає визначення місця розташування, або більш точно, відсутність поїзда на ділянці, що повторно визначається при кожному обчисленні, з погрішністю меншою, ніж 10-9, яка переважно досягає 10-12. Даний винахід стосується способу визначення місця розташування і/або позиціювання об'єкта, зокрема транспортного засобу, такого як поїзд, що рухається за відомим маршрутом, особливо стосовно залізничного транспорту, який характеризується тим, що згадане визначення місця розташування і/або згадане позиціювання об'єкта здійснюють за допомогою точних розрахунків, виконаних у конкретний момент часу, основаних, з одного боку, на первинних вимірах з використанням, щонайменше, одного супутника, і, з іншого боку, на точній картографії згаданого відомого маршруту. Переважно, згадана точна картографія дозволяє одержати дві залежності з трьома невідомими, які представляють координати згаданого об'єкта, чиє місце розташування і/або позиціювання потрібно встановити, у той час як хоча б ще одна залежність між цими ж трьома невідомими визначається за допомогою інформації, переданої щонайменше одним супутником, чиє місце розташування відоме. Більш конкретно, даний винахід стосується способу, в якому кожен первинний вимір полягає у визначенні індивідуальної ділянки вищезгаданого маршруту між двома оцінками шляху, причому визначення згаданої ділянки залежить від стандартного відхилення погрішності виміру часу згаданого первинного виміру, швидкості світла, коефіцієнта, що залежить від координат згаданого розглянутого суп утника і маршруту, а також від коефіцієнта, який визначає геометрію розподілу помилок будь-якого запису виміру таким чином, щоб імовірність відсутності поїзда на згаданій індивідуальній ділянці дорівнювала попередньо заданій. Переважно, кожен запис виміру дублюється, що дозволяє визначити велику кількість індивідуальних ділянок за допомогою великої кількості записів первинних вимірів, виконаних одночасно, у той самий заданий час, і базованих на використанні сигналів різних супутників або пар супутників. Згідно з першим втіленням, первинний вимір буде здійснено за допомогою пари супутників, що мають одну й ту саму систему відліку часу. Переважно, пара супутників належить до однієї і тій же групи. Згідно з іншим кращим втіленням, первинний вимір виконують за допомогою, щонайменше одного, суп утника, який належить до групи, і приймача, зв'язаного з об'єктом, що рухається за відомим маршрутом, причому згаданий приймач синхронізований із системою відліку часу згаданої групи, до якої належить і суп утник. Це говорить про те, що для одночасного одержання великої кількості первинних вимірів достатньо збільшити кількість супутників. Переважно визначають загальну ділянку як перетинання різних, переважно всіх, індивідуальних ділянок. Особливо бажано виключити індивідуальні ділянки, які не мають загальних точок із загальною ділянкою. Отже, якщо існує не нульова загальна ділянка, ділянка можливої присутності об'єкта, який рухається, визначається як об'єднання не виключених індивідуальних ділянок. Звідси робиться висновок, що імовірність відсутності об'єкта на об'єднаній ділянці визначається як добуток імовірностей відсутності об'єкта на відомих індивідуальних ділянках. Згідно з переважним втіленням, індивідуальні ділянки, які визначають об'єднану ділянку, залежать від параметра, що визначає геометрію розподілу помилок, який більше або дорівнює параметру, вибраному для завдання індивідуальних ділянок, які визначають загальну ділянку. Винахід також стосується пристрою для визначення місця розташування і/або позиціювання об'єкта, переважно транспортного засобу, подібного до поїзда, що рухається за відомим маршрутом, особливо стосовно залізничного транспорту, який включає щонайменше: устаткування, зв'язане зі згаданим об'єктом, причому згадане устатк ування містить, щонайменше, один центральний комп'ютер, щонайменше один приймач/декодер сигналів, які надходять від одного або більше суп утників, інтерфейс радіозв'язку і базу даних, яка містить картографію маршруту ви щезгаданого об'єкта; центральне устаткування, яке включає центральний комп'ютер, один або більше інтерфейсів радіозв'язку, систему шин передачі даних, базу даних, яка містить картографію маршруту· програму, яка дозволяє вносити зміни у вищезгадану картографію, і хоча б одну консоль, а також елементи інтерфейсів об'єкт/центральне устаткування і людина/об'єкт, що переміщується. Переважно, у приймачі/декодері передбачений годинник, синхронізований із системою відліку часу групи суп утників. Переважно, пристрій, описаний у даному винаході, містить також велику кількість додаткових датчиків. Переважно, центральне устатк ування є портативним. Спосіб для визначення місця розташування і/або позиціювання об'єкта, і зокрема поїзда, що рухається за відомим маршрутом, може бути розглянутий у дво х різних режимах роботи: лінійний режим, при якому поїзд рухається по колії, яка не має розгалужень поблизу його місцезнаходження; топологічний режим, при якому поїзд або збирається увійти в зону розгалуження, або неможливо з вірогідністю стверджувати, що він з цієї зони вийшов. Головним чином, даний винахід стосується визначення місця розташування поїзда, який рухається в лінійному режимі. Приклади реалізації в топологічному режимі руху, наприклад, при проходженні зон розгалуження, описані нижче, і дозволяють швидко перейти з топологічного режиму в лінійний, а отже застосувати спосіб згідно з даним винаходом. Звичайно ж, термін транспортний засіб, що рухається за відомим маршрутом, узагальнює різні поняття, наприклад судно, що йде по мережі каналів, машина, що рухається по автостраді, точний маршрут проходження якої відомий, і т.д. Слід зазначити, що в області залізничної сигналізації, маршрут об'єкта, і, більш конкретно, поїзда, точно і вірогідно відомий. Отже, доцільно просто перевірити, чи не наближається поїзд до небезпечної точки (специфічної ділянки шляху), і дати сигнал про його присутність поїзду, що іде за ним, щоб останній міг проїхати цю небезпечну ділянку без якого-небудь ризику зіткнення з попереднім. Період відновлення даних у залізничній системі повинен дорівнювати, максимум, від однієї до декількох секунд. Лінійний режим У цьому режимі поїзд локалізований у межах ділянки, обмеженої двома позначками шляху, іншими словами, у межах довірчого інтервалу, заданого двома криволінійними координатами, в якому, для встановленого маршруту, точна траса проходження якого відома (або, принаймні, якщо не точна траса, то ймовірна траса, визначена з високим ступенем імовірності), можливо визначити відсутність поїзда з необхідно низьким рівнем погрішності. Картографія маршруту дає два точно відомих рівняння, які зв'язують три координати (висоту, широту, довготу). Картографія зберігається в надійних базах даних і встановлюється на поїзд на початку експлуатації, поряд з тим, що для гарантування цілісності вмісту стандартними засобами безпеки, прийнятими на залізничному транспорті, використовуються кодування і дублювання. Відновлення бази даних проводиться, за необхідністю, переважно згідно з належним протоколом. Третє рівняння буде одержано на основі первинного виміру, за допомогою щонайменше одного супутника, а переважно двох супутників. Таким виміром є: або вимір часу проходження сигналу від супутника до приймача, розташованого на об'єкті (поїзді), що рухається, який визначає відстань між супутником і приймачем, якщо годинник приймача синхронізований із системою відліку часу гр упи суп утників, до якої належить даний супутник; або вимір різниці між часами проходження сигналу від кожного з пари супутників до їх приймача, розташованого на об'єкті (поїзді), що рухається, у випадку якщо годинник приймача не синхронізований із системою відліку часу гр упи суп утників, до якої належить дана пара супутників. Варто помітити, що у випадку запису первинного виміру, виконаного з використанням Двох суп утників, що належать переважно до однієї групи, або, принаймні, до груп, які використовують одну й ту саму систему відліку часу, немає необхідності синхронізувати годинники приймача, розташованого на поїзді, з даною системою відліку часу. І навпаки, у випадку, коли первинний вимір здійснюється за допомогою одного супутника, необхідно, щоб годинники приймача, розташованого на об'єкті, що рухається за відомим маршрутом, були синхронізовані із системою відліку часу в гр упі, до якої належить даний супутник. Це збільшує реалізаційну вартість способу, який відповідає даному винаходу, але знижує число суп утників, необхідних для виконання кожного первинного виміру. Під час первинного виміру (і=1), отже, буде зроблена спроба визначити, використовуючи систему рівнянь (трьох або чотирьох) з багатьма невідомими (три або чотири), місцезнаходження вищезгаданого транспортного засобу, що рухається, або, більш точно, ділянку шляху Dі, обмежену на трасі двома точками Міmi n і Міmax, які відраховуються від деякої довільної, але окремої для кожної лінії точки відліку дальності, і які розділені відстанню: 2hacsia i, де ha - безрозмірний коефіцієнт, що визначає геометрію розподілу помилок; с - швидкість світла; si - відоме стандартне відхилення погрішності виміру часу, і a i - безрозмірний коефіцієнт, зв'язаний з координатами супутників і з маршрутом. Якщо s1 означає відоме стандартне відхилення погрішності виміру часу під час даного першого первинного виміру, виконаного, наприклад, за допомогою першої пари супутників, тоді ±has1 може розглядатися як межа погрішності вимірів з імовірністю Ра (наприклад, від 10-2 до 10-4), що визначає ha як безрозмірний коефіцієнт, який дозволяє допустити, що розподіл при первинних вимірах задовольняє закону Гаусса. Звичайно ha знаходиться в межах від 1 до 4, переважно від 2 до 3. При цьому, якщо ha занадто велике, то це знижує критерій точності вимірів, тобто це збільшує рівень імовірності погрішності. І навпаки, якщо ha занадто мале, збільшується ризик не збіжності вимірів і, отже, відмови від урахування вищевказаного первинного виміру. ha і кількість первинних вимірів (і, отже, кількість задіяних супутників) варто вибирати таким чином, щоб одержати заздалегідь встановлені імовірнісні показники. Варто відзначити, що s1 включає випадковий розподіл помилок, зв'язаний, наприклад: зі швидкістю поширення хвиль в іоносфері і тропосфері; з відносною погрішністю калібрування синхронізації внутрішніх годинників супутників; з помилками між їх дійсним місцезнаходженням і їх місцезнаходженням, що враховується; з помилками синхронізації з одержаними повідомленнями; і т.д. Первинний вимір повторюється k разів (з k супутниками або k різними парами супутників). Ці k первинних вимірів можуть бути виконані з використанням різних груп. У такий спосіб ділянки шляху D2a...DKa визначаються так само, як і D1a. Якщо всі ці ділянки шляху Dia містять підмножину позначок шляху, яка є загальною для них, то загальна ділянка шляху D0a визначається як перетинання ділянок шляхів Dia. У цьому випадку параметри підсистеми використовуваних супутників знаходяться в їх нормальному режимі функціонування, принаймні для вимірів, необхідних у даний момент. Це може бути встановлено як необхідна умова в розрахунковому алгоритмі. Більш того, якщо задовольняються умови існування D 0a, імовірністю наявності невідомого спотворення в підсистемі використовуваних суп утників можна знехтувати; таке спотворення привело б до того, що вимір був би недійсним, або до заниження імовірності погрішності при розрахунку ділянки шляху. У противному випадку можуть бути виконані додаткові виміри з використанням одного або двох додаткових супутників. Варто помітити, що опис, приведений вище, базується на використанні двох супутників. Такий же опис, безсумнівно, може бути представлений для індивідуальних супутників, які діють узгоджено з приймачем, за умови, що сам приймач має годинник, синхронізований із системою відліку часу групи, до якого належить(ать) суп утник(и). Проте, забезпечення синхронізації годинників із системою відліку часу гр упи, наприклад на базі цезієвого генератора частоти, усе ще відносно дорого і досить імовірно, що таке рішення не буде розглядатися. Якщо, нарешті, пари використовуваних супутників належать до різних груп, або якщо належний контроль дає можливість переконатися, що не існує типової погрішності в заданій групі, тоді імовірність того, що в дійсності об'єкт знаходиться поза об'єднаною ділянкою Dub (визначеною як об'єднання індивідуальних ділянок Dib: 2hbсs1a 1) буде, як максимум, дорівнювати (Pb) k, що дозволяє досягти необхідного рівня імовірності погрішності в межах від 10-9 до 10-12. Коефіцієнт hb визначається як hb³ha, за умови, щоб імовірність Рb перебування об'єкта поза ділянкою шляху 2h bcsia i, була настільки мала, наскільки це можливо (наприклад, від 10-3 до 10-6). У межах заданої групи можна домогтися відсутності типової погрішності, наприклад, пошуком місця розташування відомих фіксованих станцій з використанням однієї і тієї ж пари супутників. Про виправленняможна повідомити до поїзду або через командний пункт, або використовуючи місцевий радіозв'язок. Час, необхідний для цієї операції, повинний бути потім доданий до розрахункового часу. Топологічний режим Як уже було сказано вище, р ух поїзда в топологічному режимі повинний бути якнайшвидше переведений в рух у лінійному режимі, щоб можна було забезпечити виконання способу, описаного в даному винаході. Розглянемо приклад, в якому один поїзд іде за іншим, і траса між ними не має ніяких зон розгалуження, позиціювання поїзда, що знаходиться позаду, здійснюється винятково в лінійному режимі; це дозволяє розрахувати межу його просування на основі інформації про можливе місце розташування хвостово ї частини поїзда, що йде попереду, для чого може знадобитися прямий або непрямий зв'язок з цим поїздом. Аналогічно, коли поїзд наближається до точки розгалуження, система дає йому гарантію в тому, що між даною точкою розгалуження і самим поїздом немає ніякого іншого об'єкта, і передає йому, наприклад, (однолінійне) право доступу для проходження точок розгалуження. Володіючи цим правом доступу, можливо поміняти напрямок згідно з маршрутом, запропонованим цьому поїзду центром керування. Переконавшись в тому, що точка розгалуження встановлена в необхідне положення, і оскільки топологія шляху цього поїзда поблизу точки розгалуження відома, можна, таким чином, повертатися до попереднього варіанта, тобто способу визначення місця розташування в лінійному режимі, щоправда, можливо, після проходження точки розгалуження, прийдеться змінити точку відліку дальності з метою фіксації її для нового взятого напрямку. Право доступу повертається назад до точки розгалуження після того, як буде зареєстрований той факт, що поїзд цілком її проїхав; потім дана точка розгалуження доступна для поїзда, що іде слідом. Повернення права доступу часто спричиняє зміни картографії (новий відомий напрямок). На закінчення, рух поїзда, описаний у цьому прикладі, перейшов в лінійний режим. На Фігурі 1 представлена блок-схема устаткування, яке необхідно встановити на поїзді для реалізації способу згідно з першим втіленням. На Фігурі 2 представлена блок-схема устаткування, яке необхідно встановити вздовж маршруту для реалізації способу згідно з першим втіленням. На Фігурі 3 представлена блок-схема устаткування, яке необхідно встановити на центральному посту для реалізації способу згідно з першим втіленням. Серед різних втілень способу згідно з даним винаходом, спосіб, описаний нижче, є найбільш типовим. Він описаний з посиланнями на вищезгадані малюнки, які, відповідно, описують елементи, встановлені на поїзді, вздовж маршруту і на контрольному пункті. На фігурі 1 представлене устаткування, яке необхідно встановити на поїзді для реалізації способу згідно з першим втіленням, у варіанті, який не передбачає дублювання з метою поліпшення працездатності. В залежності від технології, використовуваної в приймачі супутникових сигналів і в декодері, це устаткування може бути продубльоване для того, щоб інформація, передана з різних суп утників, не була очевидно однаково викривлена при збоях. Елемент 1 - інтерфейс зв'язку з поїздом (TIU - Train Interface Unit) встановлюється, якщо в систему включена функція захисту поїзда (АТР). Елемент 2 - інтерфейс людина-машина (ММІ - Man Machine Interface), звичайно встановлюється для діалогу з машиністом. У випадках строгого захисту, який не передбачає сигналізацію всередині кабіни, цей елемент відсутній. Дві кабіни даного поїзда можуть використовувати той самий комп'ютер 10. Картографія 3 маршруту - це область пам'яті, з якою працює комп'ютер 10 у нормальному режимі, більш того, передбачена процедура контролю його вмісту по радіозв'язку 4 і через центральний пост на початку експлуатації. При необхідності, процедура відновлення даних здійснюється на місці. Для цього може знадобитися підтвердження машиніста через елемент 2, інтерфейс людина-машина (ММІ). Радіо 4 - це стандартний інтерфейс, який забезпечує радіозв'язок земля-поїзд, аналогового або цифрового типу (наприклад, GSM-R). У комп'ютері 10 (згідно з принципами безпеки, прийнятими на залізничному транспорті) застосовують традиційні технології: кодування (наприклад, NISAL або FIDARE) або дублювання (2 із 2), що використовується для поліпшення працездатності і вибирається на розсуд (1 із 2, 2 із 3, 2 із 4). Комп'ютер 10 з'єднаний із приймачем/декодером сигналів першого супутника 5 і з приймачем/декодером сигналів другого супутника 6. Звичайно ці приймачі/декодери є багатоканальними приймачами/декодерами і можуть одночасно зв'язуватися з багатьма супутниками. Згідно з іншим втіленням досить встановити на поїзді один приймач/декодер, який має годинник, синхронізований із системою відліку часу групи суп утників. У даному описуваному варіанті для запису кожного виміру досить одного супутника. Для поліпшення працездатності можливі різні варіанти реалізації, які, згідно з вимогами, постачені додатковими елементами: додатковими приймачами; додатковим інтерфейсом радіозв'язку; архітектурою центрального комп'ютера з дублюванням (чия пам'ять містить дані картографії); частково або цілком дубльованою архітектурою інтерфейсу людина-машина (ММІ) і інтерфейсу зв'язку з поїздом (TIU). Для реалізації варіантів з підвищеною точністю можна, за бажанням, передбачити додаткові датчики 7 (датчики прискорення, гіроскопи, доплеровські радари й ін.). На фігурі 2 представлений основний варіант, який необхідно розмістити вздовж траси і який може бути дубльований для підвищення надійності основного устатк ування керування об'єктом. При необхідності, контролер 20 керує відповідним компонентом 22 на маршруті (об'єкті) і одержує від нього необхідні контрольні дані і змінні станів. Він керує правом доступу 23 і зберігає його, коли воно не використовується поїздом або переносним або зафіксованим спеціалізованим устаткуванням. Інтерфейс радіозв'язку 24 аналогічний тому, що використовується на об'єкті. Як і у випадку з установленим на об'єкті устаткуванням можуть бути розроблені різні варіанти дублювання. Також можливо передбачити портативне шляхове устаткування, призначене для колійних обхідників і для певного термінового контролю руху. Зокрема, воно дозволяє робітникам безпомилково визначити своє місцезнаходження на трасі, надійно обмежувати рух (і скасовувати обмеження згодом) і, при необхідності, одержувати попередження про поїзди, що наближаються. В одному з можливих втілень архітектура цього устаткування дуже подібна з установленим на об'єкті устаткуванням. Функції інтерфейсу людина-машина (ММІ) змінюються: вони не містять тих, що засновані на динамічній інформації від устаткування (відстань до об'єкта, швидкість і т.д.), але замість них допускають певні операції з правами доступу системи. Інтерфейс зв'язку з поїздом (TIU) стає інтерфейсом для оповіщення (наприклад, за допомогою голосного зв'язку) про поїзд, що наближається. З метою підвищення точності виміру поблизу критичних місць (наприклад, під'їзди до станцій) або для контролю використовуваної групи супутників, у належних місцях може бути встановлене устаткування, додаткове тому уста ткуванню, що прив'язано до фіксованого місця розташування шляху. Це устаткування дуже подібне з представленим на Фігурі 1, але в даному випадку воно не включає ні елементи інтерфейсу спілкування з поїздом (TIU), ні інтерфейсу людина-машина (ММІ). Більш того, воно в принципі не має функцій керування правом доступу, а призначене тільки для передачі повідомлень за запитом поїздів або центрального поста, при цьому використовуються миттєві розбіжності місця розташування (лінійне положення) для кожної пари супутників, задіяних системою, сигнали яких вона може уловлювати. Ці розбіжності використовуються для звуження довірчого інтервалу вимірів і для перевірки використовуваних супутників. На малюнку 3 представлений центральний пост згідно з кращим втіленням, який характеризується тим, що мінімальна кількість функцій виконується в захи щеному режимі. За винятком контролю картографії, основні функції уста ткування виконуються без звертання до системи захисту центрального поста. На практиці устаткування системи захисту 40, 41, 42, 43, 44 може бути додане для виконання додаткових функцій центрального комп'ютера 30: забезпечення безпеки робітників на шляху, різні засоби захисту, функції віддаленого контролю для сумісності з не цілком укомплектованими локомотивами, резервне копіювання інформації на випадок збою в роботі і т.д. Керування картографією 33 виконується не в режимі «реального часу», але в захищеному режимі, за допомогою спеціалізованого устаткування 38. Структурування системи (пріоритети для поїздів, інструкції для них же, що дозволяють встановити контакт із різними контролерами об'єктів з метою одержання відповідних прав доступ у й ін.) здійснюється за допомогою центрального комп'ютера й оператором через консоль оперативного диспетчерського керування 42 і, згідно з попередньо заданим розкладом, через консоль керування розкладом 41. Контроль за експлуатацією й окремі коригувальні дії (аварії, резервування для частково некомплектних поїздів і ін.) можуть бути виконані через спеціалізовані консолі 40, 41, 42, 43, 44 (як представлено на Фігурі 3) або, наприклад, через вищезгадану консоль оперативного диспетчерського керування. Більш конкретно, загальне число консолей 40, 41, 42, 43, 44 вибирається згідно з настановними вимогами. Інтерфейси радіозв'язку 34, 35, 36 забезпечують зв'язок центрального комп'ютера із супутниками через радіо шину 37, яка звичайно дублюється.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for accurately determining the location of an object, particularly a vehicle moving along a known course
Назва патенту російськоюСпособ точного определения местоположения объекта, в частности транспортного средства, движущегося по известному маршруту
МПК / Мітки
МПК: B61L 25/00, G01S 5/02
Мітки: відомим, транспортного, переважно, рухається, визначення, точного, об'єкта, спосіб, розташування, засобу, місця, маршрутом
Код посилання
<a href="https://ua.patents.su/6-72621-sposib-tochnogo-viznachennya-miscya-roztashuvannya-obehkta-perevazhno-transportnogo-zasobu-shho-rukhaehtsya-vidomim-marshrutom.html" target="_blank" rel="follow" title="База патентів України">Спосіб точного визначення місця розташування об’єкта, переважно транспортного засобу, що рухається відомим маршрутом</a>
Спосіб визначення місця розташування захищеного тензорезистора та пристрій для його здійснення
Номер патенту: 36153
Опубліковано: 16.04.2001
Автор: Селівановський Володимир Юрійович
Мітки: місця, розташування, тензорезистора, захищеного, спосіб, визначення, здійснення, пристрій
Формула / Реферат:
1. Спосіб визначення місця розташування захищеного тензорезистора, що включає збудження у тензорезисторі та вивідних проводах змінного струму за допомогою генератора змінного струму і збуджувальної обмотки, який відрізняється тим, що у коло тензорезистора вмикають вибірний підсилювач, який настроюється на частоту генератора, магнітне поле збуджувальної обмотки зменшується до розмірів, менших за габарити тензорезистора, збуджувальну обмотку...
Спосіб визначення розташування місця течі в трубопроводі
Номер патенту: 15392
Опубліковано: 30.06.1997
Автори: Царік Микола Федорович, Білик Володимир Сергійович, Сулєма Валерій Григорович, Береговий Олександр Леонідович, Петимко Павло Ілліч, Хомяков Валерій Васильович
МПК: G01M 3/24, F16L 55/00
Мітки: течії, трубопроводі, спосіб, розташування, визначення, місця
Формула / Реферат:
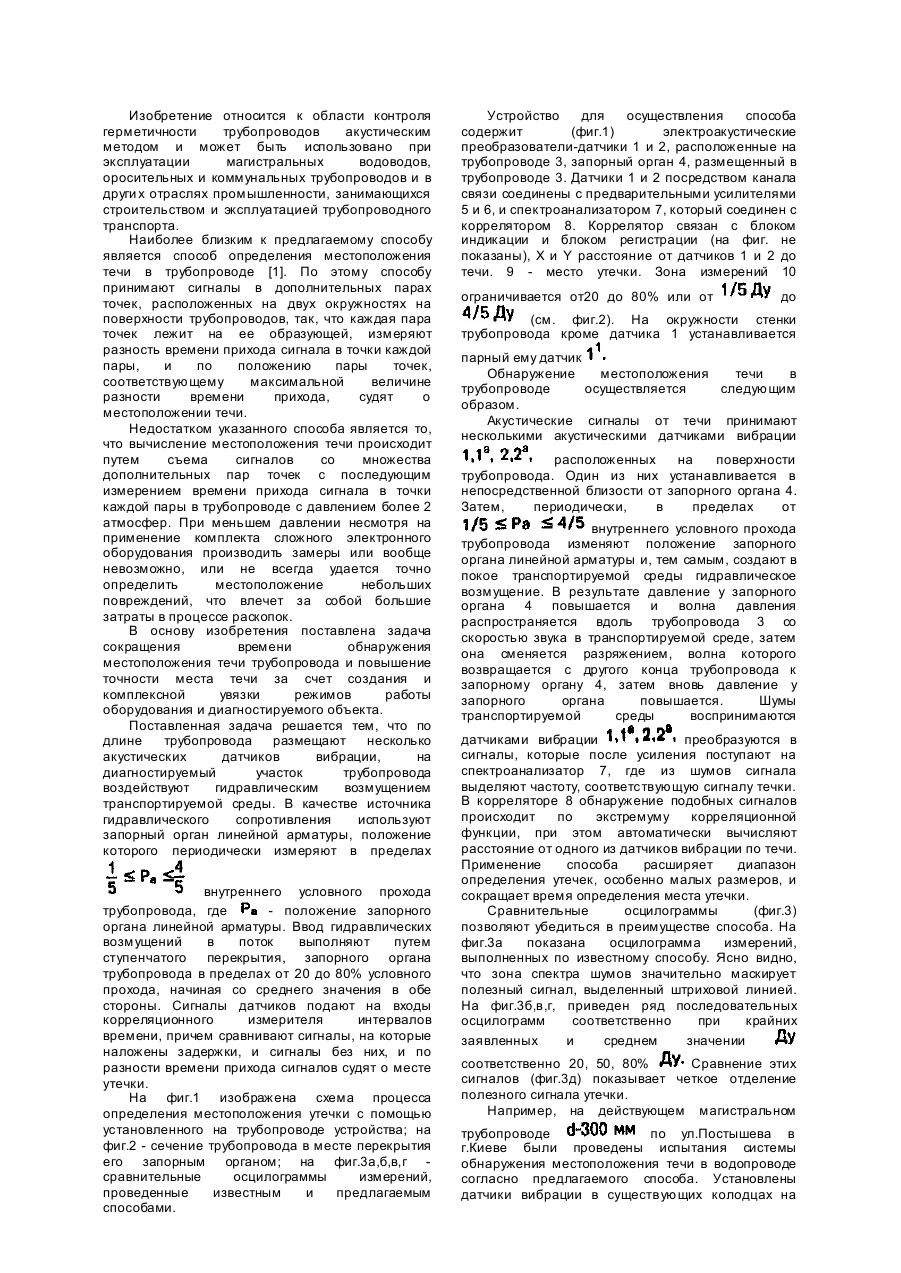
1. Способ определения местоположения течи в трубопроводе, включающий съем акустических сигналов с пары датчиков, расположенных на поверхности трубопровода с транспортируемой жидкостью, преобразование их в электрические, задержка одного из сигналов, сложение задержанного и незадержанного сигналов, выделение из суммарного сигнала спектра течи и определение местоположения течи по положению пары датчиков, соответствующему максимальной величине...
Спосіб та система для гальмування та/або зупинки транспортного засобу, що рухається вздовж колії
Номер патенту: 29521
Опубліковано: 15.11.2000
Автори: Грассарт Франсіс, Кнуде Філіпп, Ноттаріго Калогєро, Бінард Шарль
МПК: B61L 3/00
Мітки: колії, рухається, транспортного, система, спосіб, вздовж, засобу, зупинки, гальмування
Текст:
...щ о в і дп ов і д ає, нап р ик л а д, н ая в н ос ті р оз ря ді в із зн ач ен н я м 1, а поті м - ко л и в о н о мі ні ма л ь н е щ о , від по від ає , нап р ик л а д , на яв н ос ті ро зр я дів із зн а ч ен ня м 0. Зав дя ки ц ьо му з'яв ляєтьс я м о ж ли вість ви б рати , в залежнос ті від конкретних умов застосу в ан ня, а бо в и щ у із дв ох в и мі рю в а н их шв ид кос те ,й аб о с е ре д нє із цих д в ох з нач ен ь . В ин ахі д по ш и р...
Пристрій для визначення місця розташування джерел випромінювання
Номер патенту: 46882
Опубліковано: 17.06.2002
Автори: Лен Фредерік, Гоше Жан-Клод, Галь Олівьє
Мітки: джерел, місця, випромінювання, пристрій, визначення, розташування
Формула / Реферат:
1. Пристрій для визначення місця розташування джерел випромінювання (2), які можуть розташовуватись в зоні, що містить камеру з точковою діафрагмою (4), стінка якої функціонує як екрануюча оболонка (6), що поглинає зазначене проміння, засоби (16, 33) закриття камери з точковою діафрагмою, які є прозорими для радіоактивного випромінювання джерела, пристрій також містить засоби (24-26, 70-72) формування зображень в камері з точковою діафрагмою,...
Спосіб визначення маршруту руху наземного транспортного засобу у вибраний проміжок часу
Номер патенту: 57202
Опубліковано: 16.06.2003
Автор: Олексієнко Олег Володимирович
МПК: G01C 21/34, G01C 7/00
Мітки: маршруту, засобу, часу, вибраний, проміжок, спосіб, транспортного, визначення, наземного, руху
Формула / Реферат:
Спосіб визначення маршруту рухання наземного транспортного засобу у вибраний проміжок часу що включає читання дискретної інформації від супутників GPS та ГЛОНАСС про місцезнаходження наземного транспортного засобу, запис та зберігання отриманої інформації, обробку записаної інформації з допомогою спеціального програмного забезпечення комп'ютерів і вивід здобутих результатів в системах відображення інформації, який відрізняється тим, що для...
Попередній патент: Зернозбиральний комбайн
Наступний патент: Спосіб кислотної обробки заглинизованих пластів
Випадковий патент: Система контролю і керування рухомими та стаціонарними об'єктами