Спосіб визначення якості форми обвідної сигналу і пристрій для його реалізації (варіанти)
Номер патенту: 74399
Опубліковано: 15.12.2005
Автори: Блек Пітер, Монтохо Хуан, Сіндгушаяна Наґабгушана
Формула / Реферат
1. Спосіб визначення, за результатами вимірювання, якості форми обвідної, який включає:
- визначення сукупності зсувів параметрів поточного сигналу відносно ідеального сигналу,
- компенсацію поточного сигналу сукупністю зсувів для генерування компенсованого поточного сигналу,
- фільтрування компенсованого поточного сигналу для генерування фільтрованого сигналу,
- модифікування ідеального сигналу, відповідного фільтрованому сигналу, для генерування модифікованого сигналу і
- визначення, за результатами вимірювання, якості форми обвідної згідно з модифікованим ідеальним сигналом і фільтрованим сигналом.
2. Спосіб за п. 1, який відрізняється тим, що сукупність зсувів включає зсув частоти, часовий зсув і фазовий зсув.
3. Спосіб за п. 1, який відрізняється тим, що компенсація поточного сигналу сукупністю зсувів включає компенсацію згідно з рівнянням
![]()
де:
y(t) - компенсований поточний сигнал,
x(t) - поточний сигнал,
t - час,
j - уявна одиниця,
![]() - зсув частоти,
- зсув частоти,
![]() - часовий зсув,
- часовий зсув,
![]() фазовий зсув.
фазовий зсув.
4. Спосіб за п. 1, який відрізняється тим, що фільтрування включає призначення компенсованому поточному сигналу нульового значення в інтервалах, що мають бути фільтровані, і ненульового значення у решті інтервалів.
5. Спосіб за п. 4, який відрізняється тим, що фільтрування включає призначення компенсованому поточного сигналу ненульового значення на елементарних одиницях поточного сигналу.
6. Спосіб за п. 4, який відрізняється тим, що призначення компенсованому поточному сигналу значення включає:
- визначення функції, яка має нульове значення в інтервалах, що мають бути фільтровані, і має ненульове значення у решті інтервалів,
- множення компенсованого поточного сигналу на цю функцію.
7. Спосіб за п. 6, який відрізняється тим, що визначення функції включає визначення функції, яка має ненульове значення на елементарних одиницях поточного сигналу.
8. Спосіб за п. 1, який відрізняється тим, що модифікування ідеального сигналу включає генерування модифікованого ідеального сигналу, який має нульове значення в інтервалах, де фільтрований сигнал має нульове значення, і має ненульове значення у решті інтервалів.
9. Спосіб за п. 1, який відрізняється тим, що модифікування ідеального сигналу включає призначення ідеальному сигналу нульового значення в інтервалах, де фільтрований сигнал має нульове значення, і ненульового значення у решті інтервалів.
10. Спосіб за п. 9, який відрізняється тим, що призначення ідеальному сигналу значення включає:
- визначення функції, яка має нульове значення в інтервалах, де фільтрований сигнал має нульове значення, і має ненульове значення у решті інтервалів,
- множення компенсованого поточного сигналу на цю функцію.
11. Спосіб за п. 5, який відрізняється тим, що визначення якості форми обвідної включає обчислення першої результуючої точності модуляції.
12. Спосіб за п. 11, який відрізняється тим, що обчислення першої результуючої точності модуляції виконується згідно з рівнянням
де:
![]() - перша результуюча точність модуляції,
- перша результуюча точність модуляції,
j - індекс, що визначає елементарну одиницю сигналу,
N - межа підсумовування, що відповідає певній кількості елементарних одиниць,
k - індекс, що визначає зразок у елементарній одиниці,
M - межа підсумовування, що відповідає певній кількості зразків у елементарній одиниці,
![]() - k-й зразок у j-ій елементарній одиниці фільтрованого сигналу і
- k-й зразок у j-ій елементарній одиниці фільтрованого сигналу і
![]() - k-й зразок у j-ій елементарній одиниці ідеального сигналу.
- k-й зразок у j-ій елементарній одиниці ідеального сигналу.
13. Спосіб за п. 11, який відрізняється тим, що додатково включає обчислення другої результуючої точності модуляції.
14. Спосіб за п. 13, який відрізняється тим, що обчислення другої результуючої точності модуляції виконується згідно з рівнянням
де:
![]() - друга результуюча точність модуляції,
- друга результуюча точність модуляції,
j - індекс, що визначає елементарну одиницю сигналу,
N - межа підсумовування, що відповідає певній кількості елементарних одиниць,
k - індекс, що визначає зразок у елементарній одиниці,
M - межа підсумовування, що відповідає певній кількості зразків у елементарній одиниці,
![]() - k-й зразок у j-ій елементарній одиниці фільтрованого сигналу і
- k-й зразок у j-ій елементарній одиниці фільтрованого сигналу і
![]() - k-й зразок у j-ій елементарній одиниці ідеального сигналу.
- k-й зразок у j-ій елементарній одиниці ідеального сигналу.
15. Спосіб за п. 4, який відрізняється тим, що визначення якості форми обвідної включає обчислення точності модуляції для каналу з розділенням часу.
16. Спосіб за п. 15, який відрізняється тим, що обчислення точності модуляції для каналу з розділенням часу виконується згідно з рівнянням
де:
PTDM_channel - точність модуляції каналу з розділенням часу TDM_channel,
j - індекс, що визначає елементарну одиницю сигналу,
N - межа підсумовування, що відповідає певній кількості елементарних одиниць,
k - індекс, що визначає зразок у елементарній одиниці,
M - межа підсумовування, що відповідає певній кількості зразків у елементарній одиниці,
![]() - k-й зразок у j-ій елементарній одиниці фільтрованого сигналу і
- k-й зразок у j-ій елементарній одиниці фільтрованого сигналу і
![]() - k-й зразок у j-ій елементарній одиниці ідеального сигналу.
- k-й зразок у j-ій елементарній одиниці ідеального сигналу.
17. Спосіб за п. 4, який відрізняється тим, що визначення , за результатами вимірювання, якості форми обвідної включає обчислення коефіцієнтів потужності в області кодів.
18. Спосіб за п. 17, який відрізняється тим, що обчислення коефіцієнтів потужності в області кодів виконується згідно з рівнянням
 ,
,
де:
PTDM_channel,i - коефіцієнт потужності в області кодів для каналу з розділенням часу
TDM_channel,i кодового каналу і,
w1 - перший кодовий канал для каналу з розділенням часу TDM_channel,
wv - останній кодовий канал для каналу з розділенням часу TDM_channel,
j - індекс, що визначає елементарну одиницю сигналу,
N - межа підсумовування, що відповідає певній кількості елементарних одиниць,
k - індекс, що визначає зразок у елементарній одиниці,
M - межа підсумовування, що відповідає певній кількості зразків у елементарній одиниці,
![]() - k-й зразок у j-ій елементарній одиниці фільтрованого сигналу і
- k-й зразок у j-ій елементарній одиниці фільтрованого сигналу і
![]() - k-й зразок у j-ій елементарній одиниці і-го кодового каналу ідеального сигналу.
- k-й зразок у j-ій елементарній одиниці і-го кодового каналу ідеального сигналу.
19. Пристрій для визначення, за результатами вимірювання, якості форми обвідної, який включає:
- перший засіб, призначений для визначення сукупності зсувів параметрів поточного сигналу відносно ідеального сигналу,
- другий засіб, призначений для компенсації поточного сигналу сукупністю зсувів для генерування компенсованого поточного сигналу,
- третій засіб, призначений для фільтрування компенсованого поточного сигналу для генерування фільтрованого сигналу,
- четвертий засіб, призначений для модифікування ідеального сигналу, відповідного фільтрованому сигналу, для генерування модифікованого сигналу і
- п'ятий засіб, призначений для визначення, за результатами вимірювання, якості форми обвідної, згідно з модифікованим ідеальним сигналом і фільтрованим сигналом.
20. Пристрій за п. 19, який відрізняється тим, що перший засіб, другий засіб, третій засіб, четвертий засіб і п'ятий засіб включають випробувальне обладнання.
21. Пристрій за п. 19, який відрізняється тим, що перший засіб визначає сукупність зсувів, яка включає зсув частоти, часовий зсув і фазовий зсув.
22. Пристрій за п. 19, який відрізняється тим, що другий засіб виконує компенсацію поточного сигналу сукупністю зсувів згідно з рівнянням
![]()
де:
y(t) - компенсований поточний сигнал,
x(t) – поточний сигнал,
t - час,
j - уявна одиниця,
![]() - зсув частоти,
- зсув частоти,
![]() - часовий зсув,
- часовий зсув,
![]() - фазовий зсув.
- фазовий зсув.
23. Пристрій за п. 19, який відрізняється тим, що третій засіб виконує фільтрування, призначаючи компенсованому поточному сигналу нульове значення в інтервалах, що мають бути фільтровані, і ненульове значення у решті інтервалів.
24. Пристрій за п. 23, який відрізняється тим, що третій засіб виконує фільтрування, призначаючи компенсованому поточному сигналу ненульове значення на елементарних одиницях поточного сигналу.
25. Спосіб за п. 23, який відрізняється тим, що третій засіб призначає компенсованому поточному сигналу значення, виконуючи для цього:
- визначення функції, яка має нульове значення в інтервалах, що мають бути фільтровані, і має ненульове значення у решті інтервалів,
- множення компенсованого поточного сигналу на цю функцію.
26. Пристрій за п. 25, який відрізняється тим, що третій засіб виконує визначення функції, визначаючи функцію, яка має ненульове значення на елементарних одиницях поточного сигналу.
27. Пристрій за п. 19, який відрізняється тим, що четвертий засіб модифікує ідеальний сигнал, генеруючи модифікований ідеальний сигнал, який має нульове значення в інтервалах, де фільтрований сигнал має нульове значення, і має ненульове значення у решті інтервалів.
28. Пристрій за п. 19, який відрізняється тим, що четвертий засіб модифікує ідеальний сигнал, призначаючи ідеальному сигналу нульове значення в інтервалах, де фільтрований сигнал має нульове значення, і ненульове значення у решті інтервалів.
29. Пристрій за п. 28, який відрізняється тим, що четвертий засіб призначає ідеальному сигналу значення, виконуючи для цього:
- визначення функції, яка має нульове значення в інтервалах, де фільтрований сигнал має нульове значення, і має ненульове значення у решті інтервалів,
- множення компенсованого поточного сигналу на цю функцію.
30. Пристрій за п. 24, який відрізняється тим, що п'ятий засіб визначає якість форми обвідної через обчислення першої результуючої точності модуляції.
31. Пристрій за п. 30, який відрізняється тим, що п'ятий засіб обчислює першу результуючу точність модуляції згідно з рівнянням
де:
Рoverall-1 - перша результуюча точність модуляції,
j - індекс, що визначає елементарну одиницю сигналу,
N - межа підсумовування, що відповідає певній кількості елементарних одиниць,
k - індекс, що визначає зразок у елементарній одиниці,
M - межа підсумовування, що відповідає певній кількості зразків у елементарній одиниці,
![]() - k-й зразок у j-ій елементарній одиниці фільтрованого сигналу і
- k-й зразок у j-ій елементарній одиниці фільтрованого сигналу і
![]() - k-й зразок у j-ій елементарній одиниці ідеального сигналу.
- k-й зразок у j-ій елементарній одиниці ідеального сигналу.
32. Пристрій за п. 30, який відрізняється тим, що п'ятий засіб додатково призначений обчислювати другу результуючу точність модуляції.
33. Пристрій за п. 32, який відрізняється тим, що п'ятий засіб обчислює другу результуючу точність модуляції згідно з рівнянням
де:
Рoverall-2 - друга результуюча точність модуляції,
j - індекс, що визначає елементарну одиницю сигналу,
N - межа підсумовування, що відповідає певній кількості елементарних одиниць,
k - індекс, що визначає зразок у елементарній одиниці,
M - межа підсумовування, що відповідає певній кількості зразків у елементарній одиниці,
![]() - k-й зразок у j-ій елементарній одиниці фільтрованого сигналу і
- k-й зразок у j-ій елементарній одиниці фільтрованого сигналу і
![]() - k-й зразок у j-ій елементарній одиниці ідеального сигналу.
- k-й зразок у j-ій елементарній одиниці ідеального сигналу.
34. Пристрій за п. 23, який відрізняється тим, що п'ятий засіб визначає якість форми обвідної через обчислення точності модуляції для каналу з розділенням часу.
35. Пристрій за п. 34, який відрізняється тим, що п'ятий засіб обчислює точність модуляції для каналу з розділенням часу згідно з рівнянням
де:
PTDM_channel - точність модуляції каналу з розділенням часу TDM_channel,
j - індекс, що визначає елементарну одиницю сигналу,
N - межа підсумовування, що відповідає певній кількості елементарних одиниць,
k - індекс, що визначає зразок у елементарній одиниці,
M - межа підсумовування, що відповідає певній кількості зразків у елементарній одиниці,
![]() - k-й зразок у j-ій елементарній одиниці фільтрованого сигналу і
- k-й зразок у j-ій елементарній одиниці фільтрованого сигналу і
![]() - k-й зразок у j-ій елементарній одиниці ідеального сигналу.
- k-й зразок у j-ій елементарній одиниці ідеального сигналу.
36. Пристрій за п. 23, який відрізняється тим, що п'ятий засіб визначає, за результатами вимірювання, якості форми обвідної через обчислення коефіцієнтів потужності в області кодів.
37. Пристрій за п. 36, який відрізняється тим, що п'ятий засіб обчислює коефіцієнти потужності в області кодів і згідно з рівнянням
де:
PTDM_channel,і - коефіцієнт потужності в області кодів для каналу з розділенням часу TDM_channel і кодового каналу і,
w1 - перший кодовий канал для каналу з розділенням часуTDM_channel,
wv - останній кодовий канал для каналу з розділенням часу TDM_channel,
j - індекс, що визначає елементарну одиницю сигналу,
N - межа підсумовування, що відповідає певній кількості елементарних одиниць,
k - індекс, що визначає зразок у елементарній одиниці,
M - межа підсумовування, що відповідає певній кількості зразків у елементарній одиниці,
![]() - k-й зразок у j-ій елементарній одиниці фільтрованого сигналу і
- k-й зразок у j-ій елементарній одиниці фільтрованого сигналу і
![]() - k-й зразок у j-ій елементарній одиниці і-го кодового каналу ідеального сигналу.
- k-й зразок у j-ій елементарній одиниці і-го кодового каналу ідеального сигналу.
38. Пристрій для визначення, за результатами вимірювання, якості форми обвідної, який включає:
- процесор і
- з'єднане з процесором середовище зберігання, що містить сукупність команд, що виконуються процесором, для:
- визначення сукупності зсувів параметрів поточного сигналу відносно ідеального сигналу,
- компенсування поточного сигналу цією сукупністю зсувів для генерування компенсованого поточного сигналу,
- фільтрування компенсованого поточного сигналу для генерування фільтрованого сигналу,
- модифікування ідеального сигналу, що відповідає фільтрованому сигналу, для генерування модифікованого сигналу і
- визначення, за результатами вимірювання, якості форми обвідної згідно з модифікованим ідеальним сигналом і фільтрованим сигналом.
39. Пристрій за п. 38, який відрізняється тим, що процесор визначає сукупність зсувів, яка включає зсув частоти, часовий зсув і фазовий зсув.
40. Пристрій за п. 38, який відрізняється тим, процесор виконує компенсацію поточного сигналу сукупністю зсувів, виконуючи інструкції для обчислення згідно з рівнянням
![]()
де:
y(t) - компенсований поточний сигнал,
x(t) - поточний сигнал,
t - час,
j - уявна одиниця,
![]() - зсув частоти,
- зсув частоти,
![]() - часовий зсув,
- часовий зсув,
![]() - фазовий зсув.
- фазовий зсув.
41. Пристрій за п. 38, який відрізняється тим, що процесор виконує фільтрування, і дає команду призначити компенсованому поточному сигналу нульове значення в інтервалах, що мають бути фільтровані, і ненульове значення у решті інтервалів.
42. Пристрій за п. 41, який відрізняється тим, що процесор виконує фільтрування, призначаючи компенсованому поточному сигналу ненульове значення на елементарних одиницях поточного сигналу.
43. Пристрій за п. 41, який відрізняється тим, що процесор призначає компенсованому поточному сигналу значення, виконуючи команди для:
- визначення функції, яка має нульове значення в інтервалах, що мають бути фільтровані, і має ненульове значення у решті інтервалів,
- множення компенсованого поточного сигналу на цю функцію.
44. Пристрій за п. 43, який відрізняється тим, що процесор виконує визначення функції, визначаючи функцію, яка має ненульове значення на елементарних одиницях поточного сигналу.
45. Пристрій за п. 38, який відрізняється тим, що процесор модифікує ідеальний сигнал, генеруючи модифікований ідеальний сигнал, який має нульове значення в інтервалах, де фільтрований сигнал має нульове значення, і має ненульове значення у решті інтервалів.
46. Пристрій за п. 38, який відрізняється тим, що процесор модифікує ідеальний сигнал, призначаючи ідеальному сигналу нульове значення в інтервалах, де фільтрований сигнал має нульове значення, і ненульового значення у решті інтервалів.
47. Пристрій за п. 46, який відрізняється тим, що процесор призначає ідеальному сигналу значення, виконуючи команди для:
- визначення функції, яка має нульове значення в інтервалах, де фільтрований сигнал має нульове значення, і має ненульове значення у решті інтервалів,
- множення компенсованого поточного сигналу на цю функцію.
48. Пристрій за п. 42, який відрізняється тим, що процесор визначає якість форми обвідної через обчислення першої результуючої точності модуляції.
49. Пристрій за п. 48, який відрізняється тим, що процесор обчислює першу результуючу точність модуляції, виконуючи команди для обчислення згідно з рівнянням
де:
Рoverall-1 - перша результуюча точність модуляції,
j - індекс, що визначає елементарну одиницю сигналу,
N - межа підсумовування, що відповідає певній кількості елементарних одиниць,
k - індекс, що визначає зразок у елементарній одиниці,
M - межа підсумовування, що відповідає певній кількості зразків у елементарній одиниці,
![]() - k-й зразок у j-ій елементарній одиниці фільтрованого сигналу і
- k-й зразок у j-ій елементарній одиниці фільтрованого сигналу і
![]() - k-й зразок у j-ій елементарній одиниці ідеального сигналу.
- k-й зразок у j-ій елементарній одиниці ідеального сигналу.
50. Пристрій за п. 48, який відрізняється тим, що процесор додатково призначений виконувати команди для обчислення другої результуючої точності модуляції.
51. Пристрій за п. 50, який відрізняється тим, що процесор обчислює другу результуючу точність модуляції, виконуючи команди для обчислення згідно з рівнянням
де:
Рoverall-2 - друга результуюча точність модуляції,
j - індекс, що визначає елементарну одиницю сигналу,
N - межа підсумовування, що відповідає певній кількості елементарних одиниць,
k - індекс, що визначає зразок у елементарній одиниці,
M - межа підсумовування, що відповідає певній кількості зразків у елементарній одиниці,
![]() - k-й зразок у j-ій елементарній одиниці фільтрованого сигналу і
- k-й зразок у j-ій елементарній одиниці фільтрованого сигналу і
![]() - k-й зразок у j-ій елементарній одиниці ідеального сигналу.
- k-й зразок у j-ій елементарній одиниці ідеального сигналу.
52. Пристрій за п. 41, який відрізняється тим, що процесор визначає якість форми обвідної через обчислення точності модуляції для каналу з розділенням часу.
53. Пристрій за п. 52, який відрізняється тим, що процесор обчислює точність модуляції для каналу з розділенням часу, виконуючи команди для обчислення згідно з рівнянням
де:
PTDM_channel, - точність модуляції каналу з розділенням часу TDM_channel,
j - індекс, що визначає елементарну одиницю сигналу,
N - межа підсумовування, що відповідає певній кількості елементарних одиниць,
k - індекс, що визначає зразок у елементарній одиниці,
M - межа підсумовування, що відповідає певній кількості зразків у елементарній одиниці,
![]() - k-й зразок у j-ій елементарній одиниці фільтрованого сигналу і
- k-й зразок у j-ій елементарній одиниці фільтрованого сигналу і
![]() - k-й зразок у j-ій елементарній одиниці ідеального сигналу.
- k-й зразок у j-ій елементарній одиниці ідеального сигналу.
54. Пристрій за п. 41, який відрізняється тим, що процесор визначає, за результатами вимірювання, якість форми обвідної через обчислення коефіцієнтів потужності в області кодів.
55. Пристрій за п. 54, який відрізняється тим, що процесор обчислює коефіцієнти потужності в області кодів, виконуючи команди для обчислення згідно з рівнянням
 , і = w1, ..., wv
, і = w1, ..., wv
де:
PTDM_channel,і - коефіцієнт потужності в області кодів для каналу з розділенням часу TDM_channel, і кодового каналу і,
w1 - перший кодовий канал для каналу з розділенням часу TDM_channel,
wv - останній кодовий канал для каналу з розділенням часу TDM_channel,
j - індекс, що визначає елементарну одиницю сигналу,
N - межа підсумовування, що відповідає певній кількості елементарних одиниць,
k - індекс, що визначає зразок у елементарній одиниці,
M - межа підсумовування, що відповідає певній кількості зразків у елементарній одиниці,
![]() - k-й зразок у j-ій елементарній одиниці фільтрованого сигналу і
- k-й зразок у j-ій елементарній одиниці фільтрованого сигналу і
![]() - k-й зразок у j-ій елементарній одиниці і-го кодового каналу ідеального сигналу.
- k-й зразок у j-ій елементарній одиниці і-го кодового каналу ідеального сигналу.
Текст
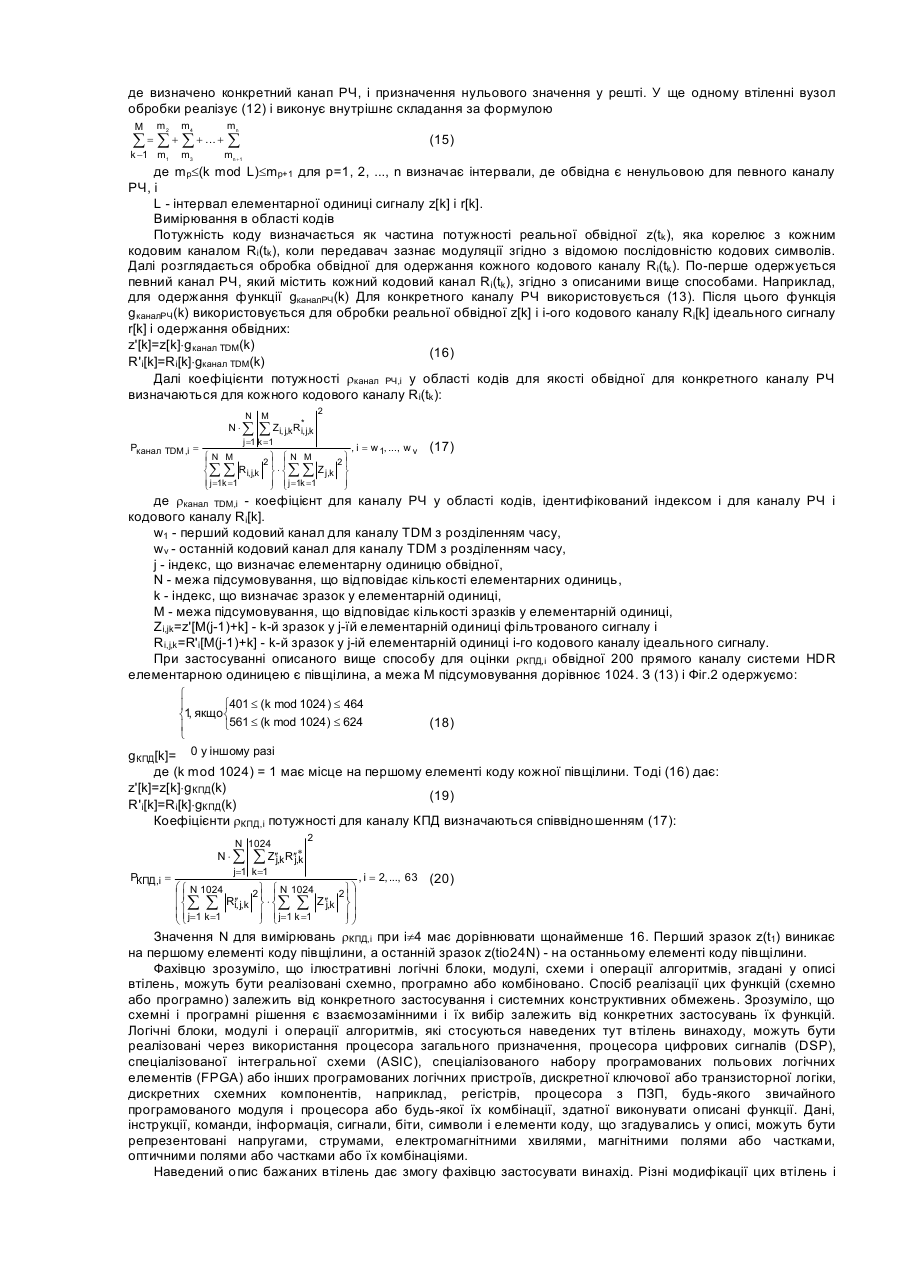
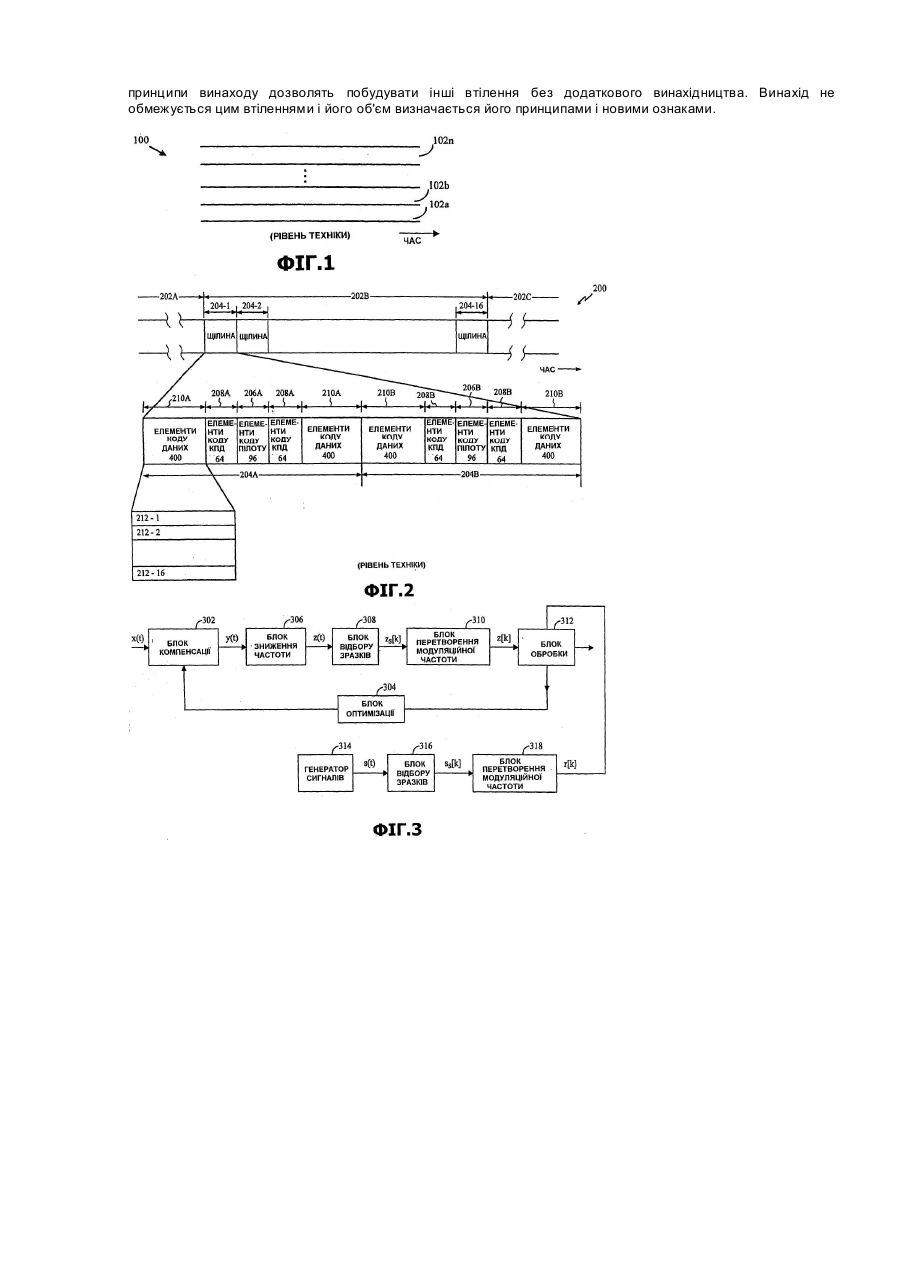
Винахід стосується забезпечення якості, зокрема способу і пристрою для вимірювання якості форми сигналу. Сучасний розвиток систем зв'язку дозволяю передавати сигнали від станції-джерела до фізично відділеної станції-адресата. Для такої передачі сигналу від станції-джерела через канал зв'язку сигнал спочатку перетворюють у форму, придатну для ефективної передачі. Канал зв'язку включає середовище, через яку передається сигнал. Перетворення, або модуляція, сигналу включає таку зміну параметра хвилі-носія згідно з сигналом, яка забезпечує обмеження спектра модульованого носія межами смуги частот. У станції-адресаті первісний сигнал відновлюється з версії модульованого носія, прийнятій цією станцією. Таке відновлення досягається застосуванням процедури, зворотної процесу модуляції, виконаної у станції-джерелі. Модуляція забезпечує також паралельний доступ, тобто одночасні передачу і/або прийом кількох сигналів у спільному каналі зв'язку. Системи зв'язку з паралельним доступом часто включають сукупність віддалених абонентських пристроїв, що час від часу вимагають відносно нетривалого обслуговування, а не постійного доступу до спільного канапу зв'язку. Відомими є кілька типів паралельного доступу, наприклад, з розділенням часу (TDMA), з розділенням за частотами (FDMA) і з амплітудною модуляцією (AM). Іншим типом є паралельний доступ з кодовим ущільненням каналу (ПДКУ, CDMA), визначений "Стандартом сумісності мобільних і базових станцій у стільникових системах двостороннього зв'язку розширеного спектра " TIA/EIA/IS95. Використання ПДКУ у системах паралельного доступу описано у патентах США 4 901 30 і 5 103 459, включених у цей опис посиланням. Фіг.1 ілюструє ідеальну форму (обвідну) 100 сигналу у системі зв'язку з кодовим ущільненням стандарту IS-95. Тут обвідна розглядається як візуальна репрезентація або вияв хвилі, імпульсу або перехідного процесу. Ідеалізована форма 100 сигналу включає паралельні канали 102, які відрізняються один від одного кодом покриття. У системі зв'язку стандарту IS-95 код покриття включає коди Уолша. У цьому випадку ідеальна форма обвідної 100 сигналу є квадратурно розширеною, фільтрованою у смузі частот модуляції з подальшим підвищенням частоти до частоти носія. Одержана в результаті модуляції форма 100 може бути репрезентована як: s( t ) = å Ri ( t )e - jwc t (1) i де w c - номінальна частота носія обвідної, і - індекс підсумовування кодових каналів і Ri(t) - комплексна обвідна ідеального і-го кодового каналу. Передавач системи зв'язку з кодовим ущільненням генерує реальну обвідну x(t), відмінну від ідеальної. Така реальна обвідна репрезентується як: x ( t ) = å b i [Ri ( t + ti ) + Ei ( t )]e - j[ wc + wt i qi ] (2) i де bі - амплітуда ідеальної обвідної відносно ідеальної для і-го кодового каналу ti - часовий зсув ідеальної обвідної відносно ідеальної для і-го кодового каналу, Δw - зсув частоти (у рад) сигналу, qi - фазовий зсув ідеальної обвідної відносно ідеальної для і-го кодового каналу і Εi - комплексна обвідна помилки (відхилення від ідеалу) реального переданого сигналу для і-го кодового каналу. Різниця між ідеальною s(t) і реальною x(t) обвідними виміряють як відхилення частоти і відхилення часу пілот-сигналу і сумісності обвідних. Один з способів виконання таких вимірювань полягає у визначенні точності модуляції, репрезентованої як частина потужності реальної обвідної x(t), яка корелює з ідеальною формою s(t), коли передавач зазнає модуляції кодовими каналами. Точність модуляції визначається як: T2 T2 T2 T1 T1 T1 Poverall = ( ò s( t ) × x( t ) * × dt ) /({ ò s( t) 2 × dt} × { ò x( t )2 × dt }) (3) де T1 - початок інтервалу інтегрування і Т2 - кінець інтервалу інтегрування. Для систем дискретного часу, де зразки s(t) і x(t) беруться в ідеальних точках tk відбору . зразків, (3) матиме вигляд: N N N k =1 k =1 k =1 Poverall = ( å ISk × Xk * I2 ) /({ å ISkI2 } × {( å IXkI2 }) (4) де Xk=x[k]=x(tk) - k-й зразок реальної обвідної і Sk-s[k]=s(tk) - відповідний k-й зразок ідеальної обвідної. Системи зв'язку з паралельним доступом можуть передавати голос і/або дані. Прикладом такої системи є система стандарту IS-95, який визначає передачу голосу і даних у канапі зв'язку. Спосіб передачі даних у кодовому канапі кадрами фіксованого розміру описано [у патенті США 5 504 773], включеному посиланням. Згідно з стандартом IS-95 дані або голос розділяються на кадри кодового канапу тривалістю 20мс і передаються з швидкістю передачі до 14,4кбіт/с. Приклади систем зв'язку, здатних передавати як голос, так і дані, включають системи, визначені стандартом "Проект партнерства 3-го покоління" (3GPP) у документах 3G TS 25.211, 3G TS 25.212, 3G TS 25.213 і 3G TS 25.214 (стандарт W-CDMA) або "Стандартом cdma2000 фізичного рівня систем розширеного спектра" (CDMA-2000). Такі системи зв'язку використовують форми сигналів, подібні описаним вище. Нещодавно була розроблена система для передачі даних з високою швидкістю (HDR) [див. заявку 08/963 386 від 11/03/1997, включену посиланням]. У такій системі використовується певний набір швидкостей передачі від 38,4кбіт/с до 2400кбіт/с, з якими термінал-джерело (пункт доступу - ПД) може надсилати пакети даних до приймального терміналу (термінал доступу - ТД). Система HDR використовує обвідну з каналами, що відрізняються як за часом, так і за кодом. Фіг.2 ілюструє таку обвідну 200, модельовану згідно з прямим каналом згаданої вище системи HDR. Обвідна 200 характеризується кадрами 202 (202а, 202b, 202с). У типовому віддаленому втіленні кадр містить 16 часових щілин 204 довжиною 2048 елементів коду кожна, що відповідає тривалості щілини 1,67мс і тривалості кадру 26,67мс. Кожна щілина 204 розділена на дві півщілини 204а, 204b, причому у кожній з цих півщілин передаються пілотні серії 206а, 206b. У типовому втіленні кожна пілотна серія має довжину 96 елементів коду і центрується на середній точці відповідних півщілин 204а, 204b. Пілотні серн 206а, 206b включають пілот-сигнал, покритий покриттям Уолша індексу 0. Пілот-сигнал використовується для синхронізації. Прямий канал 208 контролю проміжного доступу (КПД) формує дві серії 208а і дві сери 208b довжиною 64 елементи коду кожна. Серії 208а, 208b КПД передаються безпосередньо перед в безпосередньо після пілотних серій 206а, 206b кожної щілини 204. У типовому втіленні КПД складається з не менш, як 63 кодових каналів, ортогонально покритих 64-арним покриттям Уолша. Індекси КПД 0 і 1 є резервними. Зворотний канал контролю потужності (ЗКП) використовується для регулювання потужності сигналів зворотного каналу для кожної абонентської станції. ЗКП призначається одному з наявних КПД з індексами 563. КПД з індексом 4 використовується для каналу зворотної активності, який виконує контроль потоку у зворотному каналі трафіка. Прямий канал трафіка і корисна складова каналу контролю надсилаються у залишковій частині 210а першої півщілини 204а і залишковій частині 210b другої півщілини 204b. Прямий канал трафіка і дані контрольного каналу кодуються, скремблюються і переміжуються. Переміжені дані модулюються, повторюються і вкраплюються згідно з потребою. Одержані послідовності модуляційних символів демультиплексуються з утворенням 16 пар (фазних і квадратурних) паралельних потоків. Кожний з цих потоків покривається окремим 16-арним покриттям Уолша з утворенням унікально кодованого каналу 212. Після цього ідеальна обвідна квадратурно розширюється, фільтрується на модуляційній частоті і її частота підвищується до частоти носія. Одержана модульована обвідна 200 репрезентується як: s( t ) = å Ri ( t )e- jwc t i( t ) (5) де w с - номінальна частота носія обвідної, i(t) - індекс кодового каналу. Цей індекс залежить від часу, оскільки з часом змінюється кількість кодових каналів, і Ri(t) - комплексна обвідна ідеального і-го кодового каналу, причому Ri (t ) = ai [å g( t - kTc ) cos(fi,k ) + jå g( t - kTc ) sin(fi,k )] (6) k де ai - амплітуда і-го кодового каналу, g(t) - одинична імпульсна характеристика передавального смугового фільтру модуляційної частоти, f і,k - фаза k-го елемента коду і-го кодового каналу для момента tk=kTc, Тс - тривалість елемента коду. Передавач системи HDR генерує реальну обвідну x(t): x ( t ) = å bi [Ri ( t + ti ) + +Ei ( t )]e - j[(wc + wt iqi )] i (7) де bі - амплітуда ідеальної обвідної відносно ідеальної для і-го кодового каналу, ti - часовий зсув ідеальної обвідної відносно ідеальної для і-го кодового каналу, Δw - зсув частоти (у рад) сигналу, qi, - фазовий зсув ідеальної обвідної відносно ідеальної для і-го кодового каналу і Ei - комплексна обвідна помилки (відхилення від ідеалу) реального переданого сигналу для і-го кодового каналу. Аналіз комплексної часової каналізації і кодової каналізації обвідної 200 примушує дійти висновку, що способи вимірювання якості форми сигналу, базовані на кодовій каналізації, є недостатніми. Отже, існує потреба у способі і пристрої для вимірювання якості форми обвідної сигналу для обвідних, каналізованих як у часі, так і за кодами. Об'єктом винаходу є нові спосіб і пристрій для вимірювання якості форми обвідної сигналу. Згідно з цим способом, генерується реальний сигнал, що відповідає обвідній, поділеній на канали як за часом, так і за кодами. Таку реальну обвідну може генерувати, наприклад, система зв'язку. Випробувальне обладнання генерує ідеальну обвідну, що відповідає реальній, після чого генерує оцінку зсувів між параметрами реальної і ідеальної обвідних і використовує ці зсуви для компенсації реальної обвідної. У одному з втілень повна точність модуляції оцінюється згідно з компенсованою реальною і ідеальною формами обвідних. У іншому втіленні оцінюється точність модуляції для конфетного каналу обвідної з розділенням часу. Для одержання такого каналу з розділенням часу виконується обробка компенсованої реальної обвідної. У одному з втілень ця обробка включає призначення компенсованому фактичному сигналу значення, яке є ненульовим в інтервалах, де визначено певний канал з розділенням часу, і є нульовим у решті. У одному з втілень ідеальна обвідна піддається такій же обробці. У іншому втіленні безпосередньо генерується ідеальна обвідна, яка містить певний канал з розділенням часу. Точність модуляції для такого каналу оцінюється згідно з обробленою компенсованою реальною обвідною і обробленою ідеальною обвідною. Згідно з ще одним втіленням, оцінюються коефіцієнти потужності в області кодів для конкретного кодового каналу. Конкретний канал з розділенням часу компенсованої реальної обвідної, який містить конкретний кодовий канал, формується згідно з описаними вище способами. У одному з втілень ідеальна обвідна піддається такій же обробці. У іншому втіленні ідеальна обвідна, яка містить певний канал з розділенням часу, генерується безпосередньо. Точність модуляції для такого каналу оцінюється згідно з обробленою компенсованою реальною обвідною і обробленою ідеальною обвідною. Особливості, об'єкти і переваги винаходу детально розглядаються у наведеному подальшому описі з посиланнями на креслення, у яких: Фіг.1 - ідеалізована обвідна системи зв'язку з кодовим ущільненням, Фіг.2 - ідеалізована обвідна системи зв'язку HDR і Фіг.3 - концепція пристрою, придатного для виконання вимірювань якості форми обвідної згідно з винаходом. Фіг.3 ілюструє пристрій для вимірювання якості форми для обвідних каналізованих як за часом, так і за кодами (див. обвідну 200 Фіг.2). У одному з втілень реальний сигнал x(t) )репрезентує обвідну 200) надходить до блока 302 компенсації, який також генерує оцінки зсуву реальної обвідної x(t) відносно ідеальної обвідної s(t) від блоку 304 оптимізації. Блок 302 компенсації використовує оцінки зсуву для формування компенсованої обвідної y(t), яка надсилається до блоку 306 зниження частоти. Сигнал зниженої частоти надходить до необов'язкового блоку 308 відбору зразків. Зразок обвідної zs[k] надсилається до необов'язкового блоку 310 перетворення сигналу модуляційної частоти. Вихідна обвідна z(t) від блоку 310 надходить у блок 312 обробки. У одному з втілень ідеальна обвідна s(t) генерується генератором 314 сигналів. Ідеальна обвідна s(t) надсилається до необов'язкового блоку 316 відбору зразків. Зразок обвідної zs[k] надсилається до необов'язкового блоку 318 перетворення сигналу модуляційної частоти. Вихідна обвідна z(t) від блоку 318 надходить у блок 312 обробки. У іншому втіленні генератор 314 сигналів генерує цифрову обвідну r[k] безпосередньо. У такому втіленні блок 316 відбору зразків і блок 318 перетворення сигналу не потрібні. Блок 312 обробки використовує сигнали z[k] і r[k] для обчислення характеристик обвідної. Як уже відзначалось, реальна обвідна x(t) буде зсунута від ідеальної обвідної s(t) за частотою, часом і фазою. Вимірювання якості обвідної визначається для найкращого вирівнювання між зсунутою реальною обвідною x(t) і ідеальною обвідною s(t). Отже, якість обвідної оцінюється для ряду комбінацій зсувів частоти, часу і фази, і максимальна з цих оцінок береться як найкращий показник. Функцією блоку 304 оптимізації є генерування сукупності комбінацій зсувів частоти, часу і фази. Функцією блоку 302 компенсації є обробка обвідної x(t) для формування обвідної y(t): (8) y(t)=x(t-t'0)ej(Dw'×t+q') де Δw'- оцінка (рад) зсуву частоти сигналу x(t) відносно сигналу s(t), t' - оцінка часового зсуву сигналу x(t) відносно сигналу s(t), θ' - оцінка зсуву фази сигналу x(t) відносно сигналу s(t). Δw', t', і θ' забезпечуються блоком 304 оптимізації для блоку 302 компенсації. Як уже відзначалось, обвідна ч(е) зазнає підвищення частоти до частоти носія, і функцією блоку 306 є зниження частоти компенсованої обвідної y(t) до модуляційної частоти обвідної z(t). У одному з втілень блок 308 відбору зразків створює дискретну версію z[k] обвідної z(t) через відбір зразків обвідної z(t) у ідеальних точках tk відбору: (9) z[k]=z(tk); "k У іншому втіленні необов'язковий блок 308 відбору зразків відсутній і відбір зразків здійснюється блоком 312 обробки після перетворення у модуляційну частоту. Як уже відзначалось, обвідна 200 має частоту модуляції, фільтровану перед передачею. Отже, необов'язковий блок 310 перетворення усуває міжсимвольну інтерференцію (МСІ), що створюється передавальним фільтром. Для цього передатна функція блоку 310 перетворення є інверсною комплексною спряженою відносно передатної функції ідеального передавального фільтру. Блок 312 обробки обробляє сигнали z[k] і r[k] для забезпечення бажаного вимірювання якості форми обвідної, як це описано нижче. У одному з втілень, коли блок 308 відбору зразків є відсутнім, блок 312 обробки створює дискретну версію z[k] обвідної z(t) через відбір зразків обвідної z(t) у ідеальних точках tk відбору згідно з (9). Наведений опис пристрою дає змогу фахівцю модифікувати блок-схему для різних варіантів обвідних x(t) і s(t). Наприклад, якщо обвідна x(t) є цифровою репрезентацією сигналу модуляційної частоти, зникає потреба у блоці 306 зниження частоти і блоці 308 відбору зразків. Крім того, якщо обвідна x(t) не зазнає фільтрування, стає непотрібним блок 310 перетворення. Фахівець зможе модифікувати блок-схему згідно з типом вимірювання, що виконується. Якщо необхідно забезпечити дію фільтру частоти модуляції і блоки 310, 318 перетворення модуляційної частоти відсутні, блок 312 обробки забезпечується ідеальної обвідною від блоків 308, 316 відбору зразків. Вимірювання точності модуляції Точність модуляції визначається як частина потужності реальної обвідної z[k], яка корелює з ідеальною обвідною r[k], коли передавач зазнає модуляції щонайменше одним каналом у цій обвідній. Повна точність модуляції визначається як частина потужності реальної обвідної z[k], яка корелює з ідеальною обвідною r[k], коли передавач зазнає модуляції всіма каналами у цій обвідній. У типовому втіленні системи зв'язку HDR ці канали включають пілот-канап, канал КПД і канал прямого трафіка або контролю. Перша повна точність модуляції визначається як: N M N×å Poverall -1 = ìN M ï íå å R j,k ï j=1k =1 î 2ü ì N M ï ï 2 å Z j,kR j,k j =1 k =1 2ü ï (10) ý × í å å Z j,k ý ï ï j =1k =1 ï þ î þ де Poverall-1 - перша повна точність модуляції, j - індекс, що визначає елементарну одиницю обвідної, N - межа підсумовування, що відповідає кількості елементарних одиниць, k - індекс, що визначає зразок у елементарній одиниці, Μ - межа підсумовування, що відповідає кількості зразків у елементарній одиниці, Zj,k=z[M(j-1)+k] - k-й зразок у j-ій елементарній одиниці реальної обвідної і Rj,k=r[M(j-1)+k] - k-й зразок у j-ій елементарній одиниці ідеальної обвідної. Елементарна одиниця визначається як мінімальний інтервал обвідної, що визначає повну структуру каналу. Значення N межі підсумовування вибирають таким, щоб шумові відхилення вимірювання були нижчими за бажане значення. Згідно з застосуванням (10) до обвідної 200 прямого каналу системи HDR, елементарною одиницею є півщілина, а межа Μ підсумовування дорівнює 1024. Перший зразок z(t1) виникає на першому елементі коду півщілини, а останній зразок z(t1024N) - на останньому елементі коду півщілини. Значення N має дорівнювати щонайменше 2. Перша повна точність модуляції не враховує можливого порушення безперервності параметрів обвідної на границях елементарних одиниць. Друга повна точність модуляції визначається як: 2 M M+ +1 N 2 N× Z j,kR j,k M j=1 k = +1 2 å å Poverall -2 = ì M+ M +1 ïN 2 ï í å å R j,k ï j =1 M ï k = 2 +1 î ü ì 2ï ï N ï ï M+ (11) ü M +1 2 ý × í å å Z j,k ï ï j =1 M ï ï k = 2 +1 þ î 2ï ï ý ï ï þ де Poverall-2 - друга повна точність модуляції, j - індекс, що визначає елементарну одиницю обвідної, N - межа підсумовування, що відповідає кількості елементарних одиниць, k - індекс, що визначає зразок у елементарній одиниці, Μ - межа підсумовування, що відповідає кількості зразків у елементарній одиниці, Zj,k=z[(Μ+Μ/2+1)×(j-1)+k] - k-й зразок у j-ій елементарній одиниці реальної обвідної і Rj,k=r[(М+М/2+1)×(j-1)+k] - k-й зразок у j-ій елементарній одиниці ідеальної обвідної. Згідно з застосуванням (10) до обвідної 200 прямого каналу системи HDR, елементарною одиницею є півщілина, а межа Μ підсумовування дорівнює 1024. Перший зразок z(t1536N) виникає на 513-му елементі коду півщілини, а останній зразок грезам) - на 513-му елементі коду півщілини. Значення N має дорівнювати щонайменше 2. У каналі з розділенням часу (канал РЧ) точність модуляції визначається як частина потужності реальної обвідної z[k], яка корелює з ідеальною обвідною r[k], коли передавач зазнає модуляції конкретним каналом РЧ у цій обвідній. У типовому втіленні системи зв'язку HDR канали включають пілот-канал, канал КПД і канал прямого трафіка або контролю. Перша повна точність модуляції каналу РЧ визначається як: N M N× å Pканал РЧ = 2 å Z j,kR *j,k j =1 k =1 æì N M 2ü ì N M ï ï çï ç í å å R j,k ý × íå å Z j,k ç ï j=1k =1 ï ï j=1k =1 þ î èî ö 2 ü÷ ï (12) ý÷ ï÷ þø де Pканал РЧ - точність модуляції каналу РЧ (з розділенням часу), j - індекс, що визначає елементарну одиницю обвідної, N - межа підсумовування, що відповідає кількості елементарних одиниць, k - індекс, що визначає зразок у елементарній одиниці, Μ - межа підсумовування, що відповідає кількості зразків у елементарній одиниці, Zj,k=z[M(j-1)+k] - k-й зразок у j-ій елементарній одиниці реального каналу РЧ і Rj,k=r[M(j-1)+k] - k-й зразок у j-ій елементарній одиниці ідеального каналу РЧ. Концепція обробки реальної обвідної z[k] і ідеальної обвідної r[k] для одержання певного каналу РЧ розглядається нижче. Функція gканалРЧ визначається як: ìm1 £ (k mod L) £ m2 ì ï ï ïm3 £ (k mod L ) £ m4 ï ï ï í1, якщо í... ï... ï ï ï ïmn -1 £ (k mod L ) £ mn ï î î (13) gканал ПЧ(k)= 0 у іншому разі де mр£(k mod L)£mp+1 для р=1, 2 ..., n визначає інтервали, де обвідна є ненульовою для певного каналу РЧ, і L - інтервал елементарної одиниці сигналу z[k]. Тоді множення реальної обвідної z[k] і ідеальної обвідної r[k] на функцію gканалРЧ(k) дасть конкретні канали РЧ: z'[k]=z[k]×gканалРЧ(k) (14) r'[k]=r[k]×gканалРЧ(k) Зрозуміло, що застосування цієї концепції може бути іншим. У одному з втілень обробка виконується як множення обвідної на функцію, яка не дорівнює 0 у інтервалах, де визначено конкретний канал РЧ, і дорівнює 0 у іншому разі. У іншому втіленні обробка включає призначення обвідній ненульового значення у інтервалах, де визначено конкретний канап РЧ, і призначення нульового значення у решті. У ще одному втіленні вузол обробки реалізує (12) і виконує внутрішнє складання за формулою m2 m4 mn k -1 m1 m3 mn+1 M å = å + å + ... + å (15) де mp£(k mod L)£mp+1 для р=1, 2, ..., n визначає інтервали, де обвідна є ненульовою для певного каналу РЧ, і L - інтервал елементарної одиниці сигналу z[k] і r[k]. Вимірювання в області кодів Потужність коду визначається як частина потужності реальної обвідної z(tk), яка корелює з кожним кодовим каналом Ri(tk), коли передавач зазнає модуляції згідно з відомою послідовністю кодових символів. Далі розглядається обробка обвідної для одержання кожного кодового каналу Ri(tk). По-перше одержується певний канал РЧ, який містить кожний кодовий канал Ri(tk), згідно з описаними вище способами. Наприклад, для одержання функції gканалРЧ(k) Для конкретного каналу РЧ використовується (13). Після цього функція gканалРЧ(k) використовується для обробки реальної обвідної z[k] і і-ого кодового каналу Ri[k] ідеального сигналу r[k] і одержання обвідних: z'[k]=z[k]×gканал TDM(k) (16) R'i[k]=Ri[k]×gканал TDM(k) Далі коефіцієнти потужності rканал РЧ,і у області кодів для якості обвідної для конкретного каналу РЧ визначаються для кожного кодового каналу Ri(tk): 2 N M N×å Pканал TDM ,i = å Zi, j,kR*,j,k i j =1 k =1 ìN M ï íå å Ri,j,k ï j =1k =1 î 2ü ì N M ï ï 2ü ï , і = w 1, ..., w v (17) ý × í å å Z j,k ý ï ï j =1k =1 ï þ î þ де rканал TDM,і - коефіцієнт для каналу РЧ у області кодів, ідентифікований індексом і для каналу РЧ і кодового каналу Ri[k]. w1 - перший кодовий канал для каналу TDM з розділенням часу, wv - останній кодовий канал для каналу TDM з розділенням часу, j - індекс, що визначає елементарну одиницю обвідної, N - межа підсумовування, що відповідає кількості елементарних одиниць, k - індекс, що визначає зразок у елементарній одиниці, Μ - межа підсумовування, що відповідає кількості зразків у елементарній одиниці, Zi,jk=z'[M(j-1)+k] - k-й зразок у j-їй елементарній одиниці фільтрованого сигналу і Ri,j,k=R'i[M(j-1)+k] - k-й зразок у j-ій елементарній одиниці і-го кодового каналу ідеального сигналу. При застосуванні описаного вище способу для оцінки rКПД,і обвідної 200 прямого каналу системи HDR елементарною одиницею є півщілина, а межа Μ підсумовування дорівнює 1024. З (13) і Фіг.2 одержуємо: ì ì401 £ (k mod 1024 ) £ 464 ï í1, якщо í î561 £ (k mod 1024 ) £ 624 ï î [k]= 0 у іншому разі (18) gКПД де (k mod 1024) = 1 має місце на першому елементі коду кожної півщілини. Тоді (16) дає: z'[k]=z[k]×gКПД(k) (19) R'i[k]=Ri[k]×gКПД(k) Коефіцієнти rКПД,і потужності для каналу КПД визначаються співвідношенням (17): N 1024 N×å PКПД ,і = 2 å Z¢j¢,k R¢j¢,* k j=1 k =1 æ ì N 1024 çï ¢ ç íå å Ri¢, j,k ç ï j=1 k =1 èî 2 ü ì N 1024 ï ï ö 2ü÷ ï , i = 2, ..., 63 (20) ý × íå å Z¢j¢,k ý ÷ ï ï j=1 k =1 ï÷ þ î þø Значення N для вимірювань rКПД,і при і¹4 має дорівнювати щонайменше 16. Перший зразок z(t1) виникає на першому елементі коду півщілини, а останній зразок z(tio24N) - на останньому елементі коду півщілини. Фахівцю зрозуміло, що ілюстративні логічні блоки, модулі, схеми і операції алгоритмів, згадані у описі втілень, можуть бути реалізовані схемно, програмно або комбіновано. Спосіб реалізації цих функцій (схемно або програмно) залежить від конкретного застосування і системних конструктивних обмежень. Зрозуміло, що схемні і програмні рішення є взаємозамінними і їх вибір залежить від конкретних застосувань їх функцій. Логічні блоки, модулі і операції алгоритмів, які стосуються наведених тут втілень винаходу, можуть бути реалізовані через використання процесора загального призначення, процесора цифрових сигналів (DSP), спеціалізованої інтегральної схеми (ASIC), спеціалізованого набору програмованих польових логічних елементів (FPGA) або інших програмованих логічних пристроїв, дискретної ключової або транзисторної логіки, дискретних схемних компонентів, наприклад, регістрів, процесора з ПЗП, будь-якого звичайного програмованого модуля і процесора або будь-якої їх комбінації, здатної виконувати описані функції. Дані, інструкції, команди, інформація, сигнали, біти, символи і елементи коду, що згадувались у описі, можуть бути репрезентовані напругами, струмами, електромагнітними хвилями, магнітними полями або частками, оптичними полями або частками або їх комбінаціями. Наведений опис бажаних втілень дає змогу фахівцю застосувати винахід. Різні модифікації цих втілень і принципи винаходу дозволять побудувати інші втілення без додаткового винахідництва. Винахід не обмежується цим втіленнями і його об'єм визначається його принципами і новими ознаками.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for testing waveform quality and a device for the realization of the method (variants)
Автори англійськоюMontojo, Juan
Назва патенту російськоюСпособ контроля качества формы сигнала и устройство для осуществления способа (варианты)
Автори російськоюМонтохо Хуан
МПК / Мітки
МПК: H04L 1/24, H04B 1/00, H04B 17/00, H04B 3/00
Мітки: пристрій, спосіб, якості, реалізації, сигналу, варіанти, визначення, обвідної, форми
Код посилання
<a href="https://ua.patents.su/6-74399-sposib-viznachennya-yakosti-formi-obvidno-signalu-i-pristrijj-dlya-jjogo-realizaci-varianti.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення якості форми обвідної сигналу і пристрій для його реалізації (варіанти)</a>
Спосіб визначення швидкості зворотного каналу у системі безпровідного зв’язку, пристрій для реалізації цього способу, віддалена станція (варіанти) та базова станція (варіанти)
Номер патенту: 73737
Опубліковано: 15.09.2005
Автори: Кармі Гаді, Падовані Роберто, Гроб Мет'ю Ст'юарт, Бендер Пол І.
МПК: H04B 7/26, H04Q 7/38, H04L 1/00
Мітки: безпровідного, зворотного, варіанти, каналу, спосіб, базова, цього, станція, пристрій, способу, визначення, системі, віддалена, швидкості, реалізації, зв'язку
Формула / Реферат:
1. Спосіб визначення швидкості передачі зворотного каналу зазначеної віддаленої станції у системі зв'язку, де кожна базова станція, що підтримує зв'язок з віддаленою станцією, передає біт зайнятості зворотного каналу, який вказує, чи є вичерпаною пропускна здатність зворотного каналу, який включає:визначення швидкості передачі зворотного каналу згідно з об'єднаним сигналом зайнятості зворотного каналу, сформованим згідно з бітами...
Спосіб обертання фази модульованого сигналу (варіанти) і пристрій для його здійснення
Номер патенту: 67861
Опубліковано: 15.07.2004
Автори: Блек Пітер Дж., Говард Майкл А.
МПК: H03F 1/32, H04B 1/707, H04L 27/34
Мітки: сигналу, фазі, пристрій, модульованого, обертання, варіанти, спосіб, здійснення
Формула / Реферат:
1. Спосіб обертання фази модульованого сигналу, згідно з яким:- визначають обертання фази модульованого сигналу, викликане корекцією характеристик схемного елемента, зв'язаного з сигнальним каналом цього модульованого сигналу, базуючись на щонайменше одному керуючому сигналі, і- здійснюють компенсацію обертання фази відносно модульованого сигналу, щоб компенсувати обертання фази, викликане цією корекцією характеристик схемних...
Спосіб комплексного визначення властивостей і контролю якості гуми та пристрій для реалізації цього способу г.п. демченка
Номер патенту: 73863
Опубліковано: 15.09.2005
Автор: Демченко Гаррій Пимонович
МПК: G01N 3/40
Мітки: визначення, спосіб, контролю, цього, г.п, демченка, якості, способу, комплексного, пристрій, властивостей, реалізації, гуми
Формула / Реферат:
1. Спосіб комплексного визначення властивостей і контролю якості гуми, який полягає у тому, що впроваджують індентор у випробувану гуму при постійному навантаженні, витримують під навантаженням, розвантажують і виміряють величину та час переміщення індентора, який відрізняється тим, що вимірюють зменшення швидкості переміщення індентора, відповідне природному зміненню деформації випробуваної гуми.2. Спосіб за п. 1, який відрізняється...
Спосіб контролю якості короткозамкненої обмотки ротора і пристрій для його реалізації
Номер патенту: 27451
Опубліковано: 15.09.2000
Автори: Стасьо Роман Іванович, Хліпальський Юліан Збігневич, Яцун Михайло Андрійович
МПК: G01R 31/02
Мітки: реалізації, ротора, пристрій, контролю, спосіб, обмотки, якості, короткозамкненої
Текст:
...і ремонту асинхронних електродвигунів Поставлена задача розв'язується таким чи ном, що в способі контролю якості короткозамкненої обмотки ротора, при якому ротор обертають, збуджують в ньому змінні магнітні потоки, виділяють вторинні магнітні потоки, викликані струмами, що наведені в обмотці ротора збуджуючими змінними магнітними потоками і протікають по стержнях короткозамкненої обмотки ротора, вимірюють ЕРС, індуковані вторинними...
Безпроводовий передавач (варіанти), канал зв’язку (варіанти) і спосіб модулювання інформаційного сигналу (варіанти)
Номер патенту: 62980
Опубліковано: 15.01.2004
Автор: Джоу Ю-Чен
МПК: H04J 13/02, H04L 5/02, H04J 11/00, H04L 25/03, H04L 27/26
Мітки: інформаційного, модулювання, варіанти, спосіб, безпроводовій, передавач, сигналу, зв'язку, канал
Формула / Реферат:
1. Безпроводовий передавач, який має: кодер для кодування набору інформаційних біт для створення сукупності кодових символів з швидкістю передачі даних; демультиплексор для створення зазначеної сукупності кодових символів у першій і другій підгрупах кодових символів, які мають різні швидкості кодових символів, для першого і другого модуляторів, причому зазначена швидкість передачі даних дорівнює комбінованим зазначеним різним швидкостям...
Попередній патент: Пристрій для дослідження і впливу на стан точок акупунктури
Наступний патент: Механізм повороту рекламних щитів
Випадковий патент: Виносний латеральний з'єднувач для пристроїв для остеосинтезу хребта