Система автоматичного керування виконавчим органом прохідницького комбайну виборчої дії
Номер патенту: 7626
Опубліковано: 26.12.1995
Автори: Грінєвіч Євген Юрьєвич, Альперовіч Михайло Євгенович, Сіненко Віктор Васильович, Войтюк Клим Кириллович, Злодєєв Олександр Васильович, Шумалінський Семен Овсійович
Формула / Реферат
Система автоматического управления исполнительным органом проходческого комбайна избирательного действия, содержащая блок программного управления, блок исполнительных механизмов, датчик горизонтального положения исполнительного органа и задатчик направления лазерный, оптически связанный с двумя фотоприемниками, расположенными на комбайне один за другим перпендикулярно его продольной оси, отличающаяся тем, что, с целью повышения скорости прохождения подготовительных выработок и надежности управления, система снабжена блоком коррекции по направлению, блоком коррекции по контуру, двумя датчиками смещения комбайна, четярьмя сумматорами, регистром текущего значения коррекции и регистром начального значения коррекции, причем первый выход первого и выход второго фотоприемников подключены соответственно к первому и второму входам блока коррекции по направлению, выход которого соединен с первым входом первого сумматора, выход которого связан с первым входом регистра текущего значения коррекции, выход которого подключен к первому входу второго сумматора и к первому входу регистра начального значения коррекции, выход которого связан с первым входом третьего сумматора, выход которого соединен с первым входом четвертого сумматора, выход которого подключен к входу блока программного управления, первый выход которого соединен с входом блока исполнительных механизмов, а второй - с вторым входом регистра начального значения коррекции, первый и второй датчики смещения комбайна подключены соответственно к первому и второму входам блока коррекции по контуру, выход которого соединен с вторыми входами первого и второго сумматоров, выход второго сумматора связан с вторым входом третьего сумматора, датчик положения исполнительного органа подключен к второму входу четвертого сумматора и к третьим входам блоков коррекции, а второй выход первого фотоприемника соединен с третьим входом регистра текущего значения коррекции, при этом датчики смещения комбайна расположены на прямой, параллельной продольной оси комбайна на расстоянии друг от друга, равном расстоянию от первого датчика до передних зубков коронки исполнительного органа.
Текст
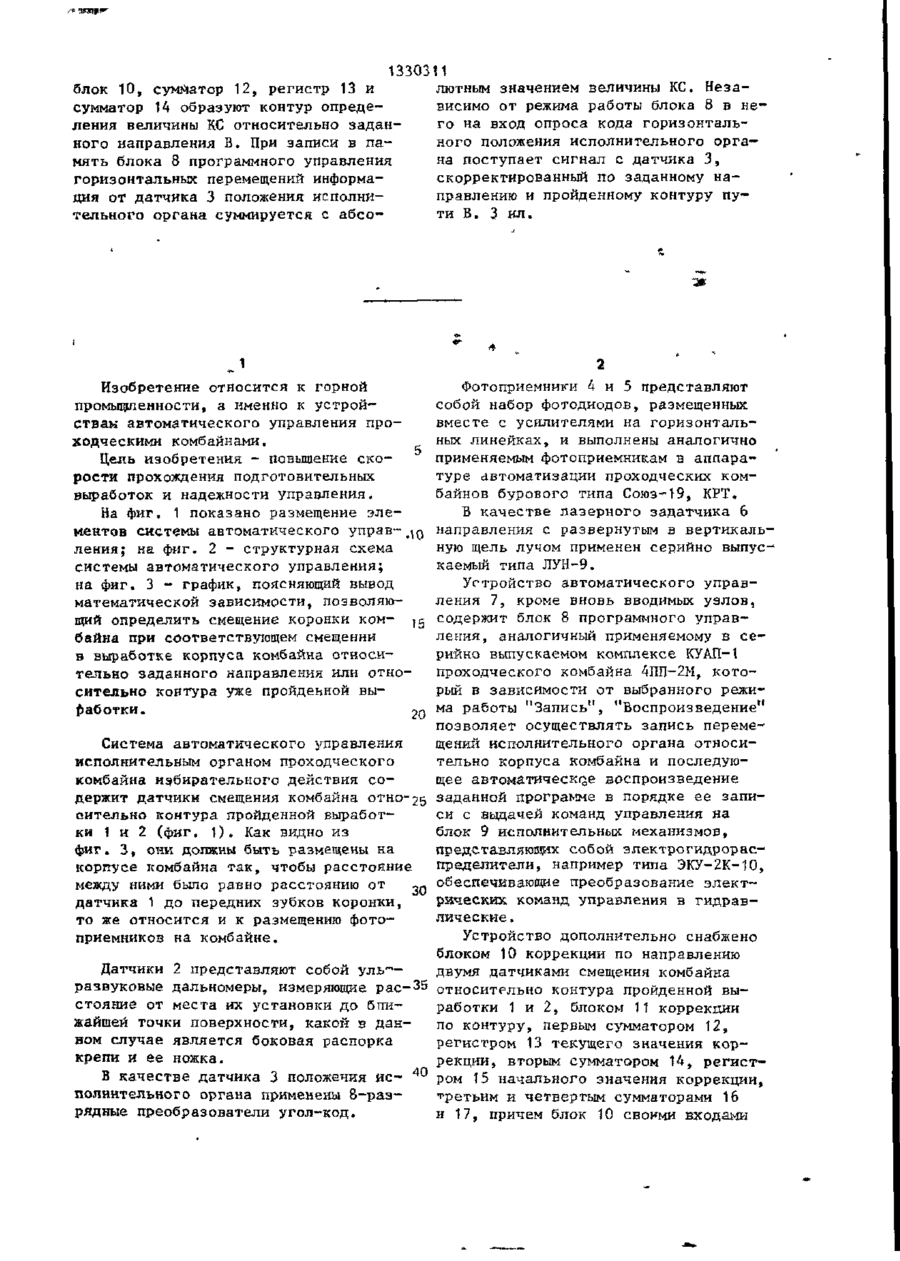
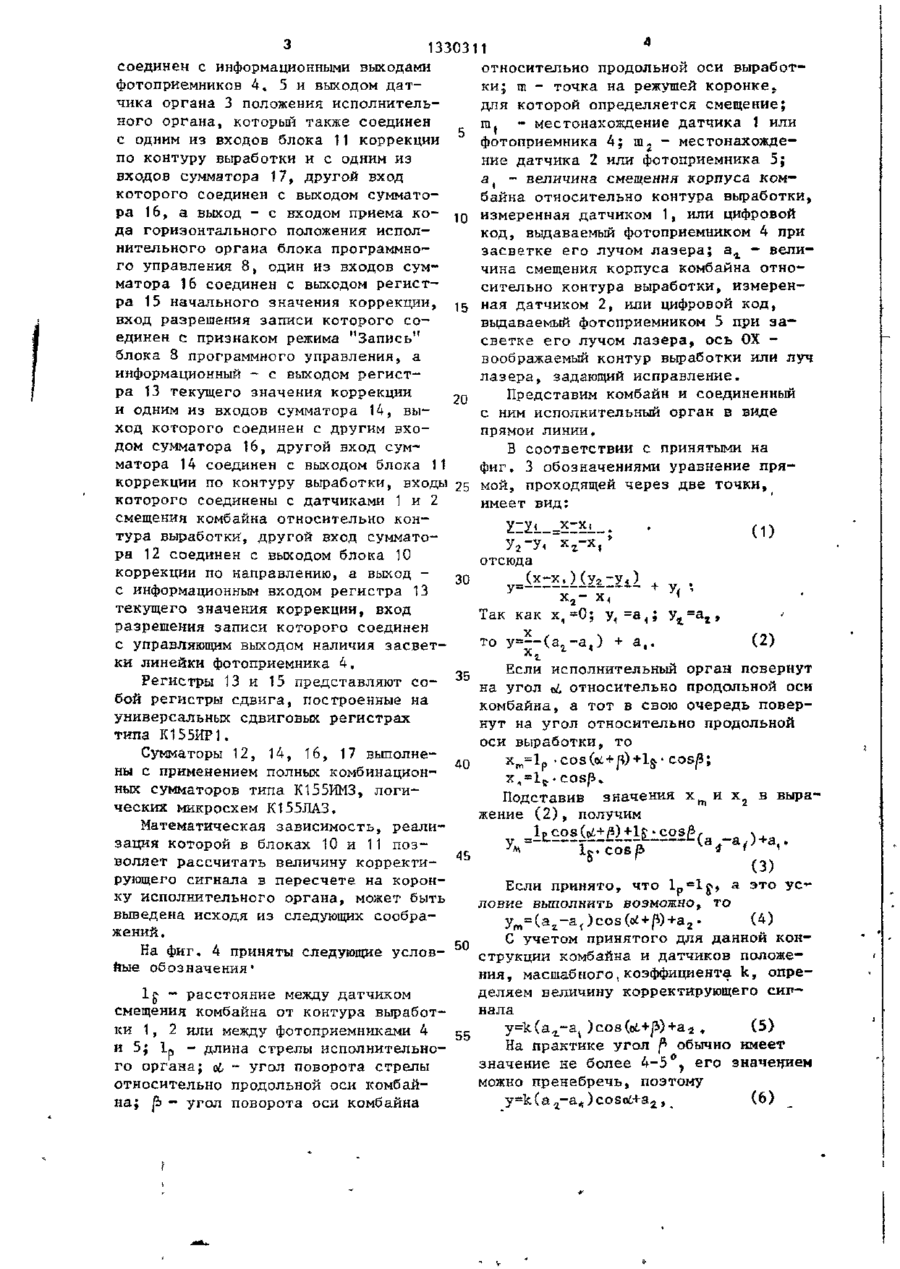
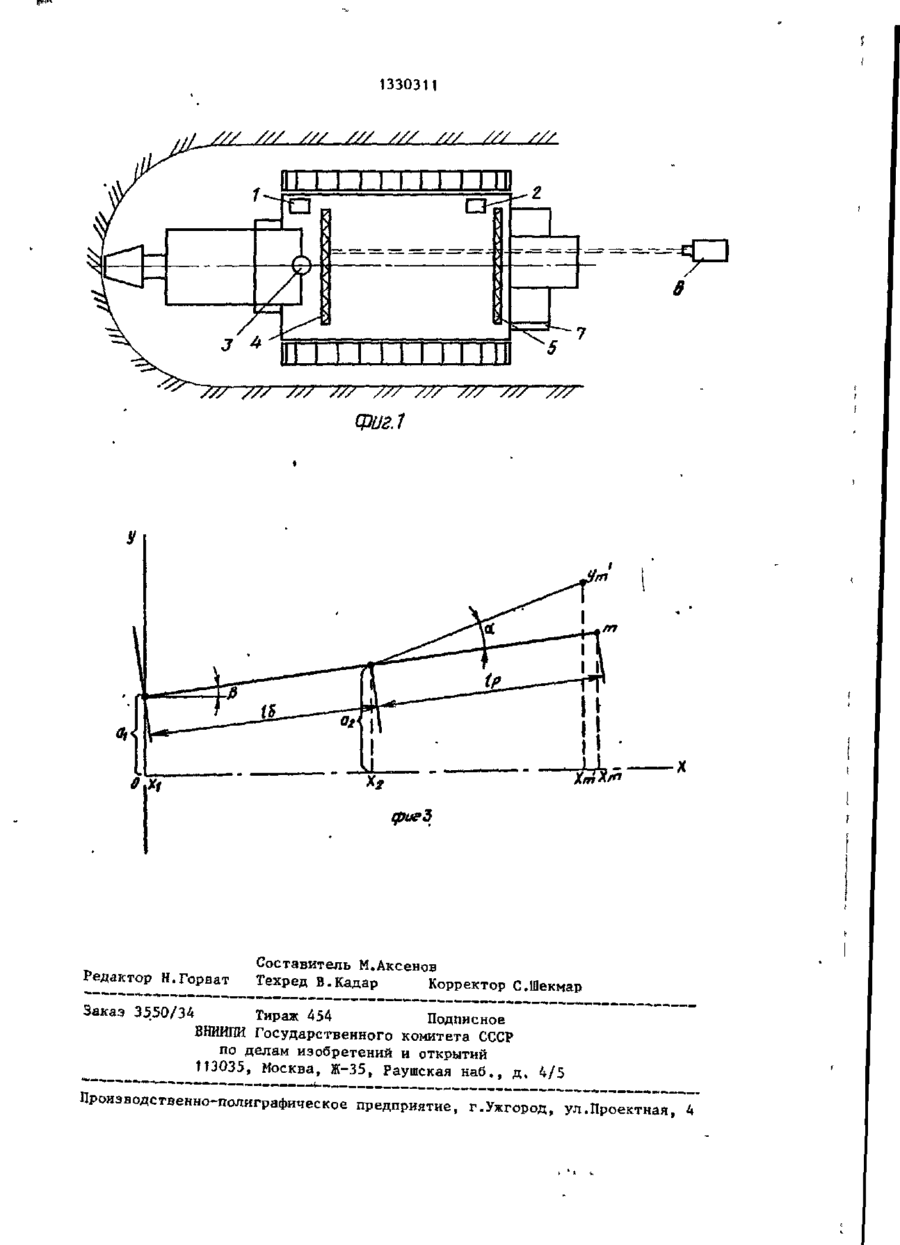
Изобретение относится к горной , пром-ти и позволяет с высокой точностью и надежностью автоматически поддерживать направление и профиль подготовительной выработки (В). Для этого система снабжена дополнительно двумя датчиками 1 и 2 смещения комбайна относительно В, блоками кор- рекции по направлению 10 и по контуру 11, четырьмя сумматорами 12, 14, 16 и 17 и регистрами 13 и 15 текущего и начального значения коррекции. Направление выработки задается установленным в ее верхней части лазерным задатчиком 6. Датчики 1, 2, блок 11 и сумматор 14 образуют контур определения величины корректирующего сигнала (КС) относительно контура В. Расположенные на комбайне перпендикулярно его оси фотоприемники 4, 5, фиг. 2 1330311 лютным значением величины КС. Незаблок 10, сумматор 12, регистр 13 и висимо от режима работы блока 8 в несумматор 14 образуют контур опредего на вход опроса кода горизонтальления величины КС относительно заданного положения исполнительного органого направления В. При записи в пана поступает сигнал с датчика 3, мять блока 8 программного управления скорректированный по заданному нагоризонтальных перемещений информаправлению и пройденному контуру пуция от датчика 3 положения исполнити В. 3 ил. тельного органа суммируется с абсо ^1 Изобретение относится к горной промьщшенности, а именно к устройствам автоматического управления проходческими комбайнами. Цель изобретения - повышение скорости прохождения подготовительных выработок и надежности управления. На фиг. 1 показано размещение элементов системы автоматического управ- tl g ления; на фиг. 2 - структурная схема системы автоматического управления; на фиг. 3 - график, поясняющий вывод математической зависимости, позволяющий ОПредеЛИТЬ Смещение КОрОНКИ КОМ- j j c байна при соответствующем смещении в выработке корпуса комбайна относительно заданного направления или относительно контура уже пройдеьной выработки. 20 Фотоприемники 4 и 5 представляют собой набор фотодиодов, размещенных вместе с усилителями на горизонтальных линейках, и выполнены аналогично применяемым фотоприемникам в аппаратуре автоматизации проходческих комбайнов бурового типа Союз-19, КРТ. Б качестве лазерного задатчика 6 направления с развернутым в вертикальную щель лучом применен серийно выпускаемый типа ЛУН-9. Устройство автоматического управления 7, кроме вновь вводимых узлов, содержит блок 8 программного управления, аналогичный применяемому в серийно выпускаемом комплексе КУАЇЇ-1 проходческого комбайна 4ПП-2М, который в зависимости от выбранного режима работы "Запись", "Воспроизведение" позволяет осуществлять запись перемещений исполнительного органа относиСистема автоматического управления тельно корпуса комбайна и последуюисполнительным органом проходческого щее автоматические воспроизведение комбайна избирательного действия содержит датчики смещения комбайна отно-25 заданной программе в порядке ее записи с выдачей команд управления на сительно контура пройденной выработблок 9 исполнительных механизмов, ки 1 и 2 (фиг, 1). Как видно из представляющих собой электрогидрорасфиг. 3, они должны быть размещены на пределители, например типа ЭКУ-2К-10, корпусе комбайна так, чтобы расстояние между ними было равно расстоянию от «о обеспечивающие преобразование электрических команд управления в гидравдатчика 1 до передних зубков коронки, лические . то же относится и к размещению фотоУстройство дополнительно снабжено приемников на комбайне. блоком 10 коррекции по направлению Датчики 2 представляют собой у л ь т двумя датчиками смещения комбайна развуковые дальномеры, измеряющие р а с - 3 5 относительно контура пройденной выстояние от места их установки до бниработки 1 и 2, блоком 11 коррекции жайшей точки поверхности, какой в данпо контуру, первым сумматором 12, ном случае является боковая распорка регистром 13 текущего значения коркрепи и ее ножка. рекции, вторым сумматором 14, регистВ качестве датчика 3 положения ис- 4 0 ром 15 начального значения коррекции, полнительного органа применены 8-разтретьим и четвертым сумматорами 16 рядные преобразователи угол-код. и 17, причем блок 10 своими входами 4 13303 11 соединен с информационными выходами относительно продольной оси выработфотоприемников 4. 5 и выходом датки; m - точка на режущей коронке, чика органа 3 положения исполнительдля которой определяется смещение; ного органа, который также соединен га. - местонахождение датчика 1 или с одним из входов блока 11 коррекции фотоприемника 4; ш 2 - местонахождепо контуру выработки и с одним из ние датчика 2 или фотоприемника 5; входов сумматора 17, другой вход а ( - величина смещения корпуса комкоторого соединен с выходом сумматобайна относительно контура выработки, ра 16, а выход - с входом приема ко- IQ измеренная датчиком 1, или цифровой да горизонтального положения исполкод, выдаваемый фотоприемником 4 при нительного органа блока программнозасветке его лучом лазера; а г - велиго управления 8, один из входов сумчина смещения корпуса комбайна отноматора 16 соединен с выходом регистсительно контура выработки, измеренра 15 начального значения коррекции, ^ ная датчиком 2, или цифровой код, вход разрешения записи которого совыдаваемый фотоприемником 5 при заединен с признаком режима "Запись" светке его лучом лазера, ось ОХ блока 8 программного управления, а воображаемый контур выработки или луч информационный - с выходом регистлазера, задающий исправление. ра 13 текущего значения коррекции ?п Представим комбайн и соединенный и одним из входов сумматора 14, выс ним исполнительный орган в виде ход которого соединен с другим вхопрямой линии. дом сумматора 16, другой вход сумВ соответствии с принятыми на матора 14 соединен с выходом блока 11 фиг. 3 обозначениями уравнение прякоррекции по контуру выработки, входы 25 мой, проходящей через две точки, которого соединены с датчиками 1 и 2 имеет вид: смещения комбайна относительно контура выработки, другой вход сумматора 12 соединен с выходом блока 10 отсюда коррекции по направлению, а выход 3 0 с информационным входом регистра 13 1 ( текущего значения коррекции, вход Так как хл -0; у, =а,; У г = а г , разрешения записи которого соединен с управляющим выходом наличия засвет(2) то у - — ( а 1 - а обычно имеет и 5; 1р - длина стрелы исполнительнозначение не более 4-5°, его значением го органа; о - угол поворота стрелы б можно пренебречь, поэтому относительно продольной оси комбай(6) _ на; fh - угол поворота оси комбайна 3 х 5 . 13303 11 6 где у - линейное смещение коронки исЕсли* в процессе работы комбайна полнительного органа; запыленность выработки увеличивается к - масштабный коэффициент, позвонастолько, что луч лазера не достиляющий согласовать абсолютгает фотоприемника А, то на вход ные значения величины коррек- з разрешения записи регистра 13 не поступает сигнал "Засветка" и регистр тирующего сигнала и величины сохраняет информацию, которая постузапрограммированного перемепала на его вход, когда луч лазера щения, приводящие к одной и засвечивал фотоприемную линейку. Татой же величине смещения иским образом датчики 1 и 2, блок корполнительного органа. '0 рекции 11, сумматор 14 образуют перВ свою очередь вый контур определения величины корректирующего сигнала относительно S мм * контура выработки, а фотоприемники 4 где Р - количество единиц младшего разряда датчика; - '5 и 5, блок коррекции 10, сумматор 12, регистр 13, сумматор 14 образуют втоS - смещение исполнительного оррой контур определения величины коргана или корпуса комбайна, ректирующего сигнала относительно засоответствующее по датчику данного направления выработки. • смещения или по фотоприемникам величине Р. 20 При воспроизведении "образцового Система работает следующим обцикла" так же как и при его записи, разом. на сумматоре 17 производится сложеЗадатчик лазерный 6 подвешивается ние действительного показания А датв верхней части выработки на некоточика 3 положения исполнительного оргаром расстоянии от комбайна так, что- 25 на комбайна с абсолютной величиной корбы его луч задавал необходимое наректирующего сигнала. правление выработке. Блок програмТаким образом, независимо от режимного управления 8 переводит в режим ма работы блока 8 программного управзаписи "образцового цикла" обработки ления в последний на вход опроса козабоя и при выполнении машинистом ка- 30 да горизонтального положения исполниких-либо перемещений исполнительным тельного органа поступает сигнал с органом комбайна последние записывадатчика 3 положения, скорректированются в память блока 8, однако при заный по заданному направлению и пройписи горизонтальных перемещений инденному контуру выработки. Если наформация от датчика горизонтальных 35 блюдается смещение комбайна в процесположений исполнительного органа А се воспроизведения программы и измесуммируется с абсолютным значением няется величина d на суммирующем вховеличины кооректирующего сигнала, коде сумматора 16, значение д о остается торая определяется как разность й - Д о неизменным. (6), где д - приведенная коррекция^ 40 Включение в состав системы автоД в - приведенная коррекция (суммарматического управления двух датчиков ная величина) определяется положения комбайна относительно конU =£ к +й т . , (7) тура пройденной выработки, блока коргде д к - абсолютное значение коррек- ^5 рекции относительно контура пройдентирующего сиг кала относиной выработки, сумматора, определяютельно контура выработки; щего текущее значение поправки корД т - текущее значение поправки, рекции, регистра для хранения последопределяемой как него текущего значения поправки предшествовавшего исчезновению сигнала где й й - абсолютное значение коррек"Засветка", когда луч лазера не достигнет фотоприемных линеек при возтирующего сигнала относирастянии запыленности выработки сумтельно заданного наГгравлематора приведенной (сумматорной) корния выработки. При воспроизведении записанного ее рекции, регистра приведенной коррекции в начальный момент записи програм"образцового цикла" выражения (6), мы, сумматора абсолютной величины, (7), (8) определяются аналогичным корректирующего сигнала, сумматора образом, причем значение сохраняется корректирующего показания датчика неизменным. 8 1330311 ключекы соответственно к первому и положения исполнительного органа псзвторому входам блока коррекции по ,воляет осуществить автоматическую ненаправлению, выход которого» соединен прерывную коррекцию показаний датчика с первым входом первого сумматора, положения исполнительного органа, а выход которого связан с первым вхоследовательно, программы перемещений дом регистра текущего значения корсамого исполнительного органа' при : рекции, выход которого подключен к смещениях комбайна в выработке вследпервому входу второго сумматора и ствие реакции забоя на машину или связанных с ее переездом в условиях, . к первому входу регистра начального значения коррекции, выход которого •• •• • когда запыленность выработки препятсвязан с первым входом третьего сумствует прохождению лазерного луча, матора, выход которого соединен с задающего направление прохождения выпервым входом четвертого сумматора, работки. , :; -. : выход' которого подключен к входу 15 Ф о р м у л а и з о б р е т е н и я блока программного управления, первый выход которого соединен с входом блока исполнительных механизмов, а Система автоматического управлевторой - с вторым входом регистра нания исполнительным органом проходчесчального значения коррекции, первый кого комбайна избирательного дейст20 и второй датчики смещения комбайна вия, содержащая блок программного подключены соответственно к первому управления, блок исполнительных мехаи второму входам блока коррекции по низмов, датчик гониэонтального полоконтуру» выход которого соединен с жения исполнительного органа и завторыми входами первого и второго датчик направления лазерный, опти25 сумматоров, выход второго сумматора чески связанный с двумя фотоприемнисвязан с вторым входом третьего сумками, расположенными на комбайне матора, датчик положения исполнительодин за другим перпендикулярно его ного органа подключен к второму вхопродольной оси, о т л и ч а ю щ а я ду четвертого сумматора и к третьим с я тем, что, с целью повышения ско30 входам блоков коррекции, а второй рости прохождения подготовительных выход первого фотоприемника соединен выработок и надежности управления, с третьим входом регистра текущего система снабжена блоком коррекции значения коррекции, при этом датчики по направлению, блоком коррекции по смещения комбайна расположены на пряконтуру, двумя датчиками смещения 35 мой, параллельной продольной оси комкомбайна, четырьмя сумматорами, ребайна на расстоянии друг от друга, гистром текущего значения коррекции равном расстоянию от первого датчика и регистром начального значения кордо передних зубков коронки исполнирекций, причем первый выход первого тельного органа. и выход второго фотоприемников под40 1330311 /// /// /У/ /// сриг.ї Редактор Н.Горват Составитель М.Аксенов Техред В.Кадар Корректор С.Шекмар Заказ 3550/ЗЬ Тираж 454 Подписное ВНИИПИ Государственного комитета СССР по делам изобретений и открытий МЗО35, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектній™
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem of automated control of executive device of development machine with selective effect
Автори англійськоюSinenko Viktor Vasyliovych, Shumalinskyi Semen Ovsiiovych, Zlodeiev Oleksandr Vasyliovych, Voitiuk Klum Kyrylovych, Alperovych Mykhailo Yevhenovych, Grinevych Yevhen Yuriiovych
Назва патенту російськоюСистема автоматического управления исполнительным органом проходческого комбайна избирательного действия
Автори російськоюСиненко Виктор Васильевич, Шумалинский Семен Евсеевич, Злодеев Александр Васильевич, Войтюк Клим Кириллович, Альперович Михаил Евгеньевич, Гриневич Евгений Юрьевич
МПК / Мітки
МПК: E21C 35/24
Мітки: виконавчим, виборчої, комбайну, прохідницького, автоматичного, дії, органом, керування, система
Код посилання
<a href="https://ua.patents.su/6-7626-sistema-avtomatichnogo-keruvannya-vikonavchim-organom-prokhidnickogo-kombajjnu-viborcho-di.html" target="_blank" rel="follow" title="База патентів України">Система автоматичного керування виконавчим органом прохідницького комбайну виборчої дії</a>
Виконавчий орган прохідницького комбайну
Номер патенту: 4579
Опубліковано: 28.12.1994
Автори: Козирьов Олег Ігоревич, Гладуш Сергій Володимирович, Страшко Василь Андрійович, Шматовський Леонід Дмитрович, Шлома Валерій Михайлович
МПК: E21C 27/24
Мітки: прохідницького, виконавчий, комбайну, орган
Формула / Реферат:
(57) Исполнительный орган проходческого комбайна, включающий стрелу с установленной на ней резцовой коронкой, выполненной в виде двух усеченных конусов, обращенных друг к другу большими основа ниями, отличающийся тем, что забойная часть коронки выполнена сферической, со отношение длины образующей усеченного конуса, расположенного со стороны сферической части, к длине образующей второго усеченного конуса обратно пропорционально отношению...
Стріловидний виконавчий орган прохідницького комбайну

Номер патенту: 4174
Опубліковано: 27.12.1994
Автори: Заславський Данило Олександрович, Доронін Олександр Дмитрович, Гребьонкін Сергій Семенович, Гарячий Володимир Григорович, Мельничук Юрій Омелянович, Азбукін Дмитро Дмитрович, Васильєв Олександр Григорович
МПК: E21C 27/24
Мітки: стріловидний, орган, комбайну, прохідницького, виконавчий
Формула / Реферат:
1. Стреловидный исполнительный орган проходческого комбайна, включающий коронку с разрушающими забой инструментами, размещенными на ее боковой и торцевой поверхностях, отличающийся тем, что разрушающие забой инструменты, расположенные на торцевой поверхности коронки, выполнены в виде гидроударных механизмов, установленных под углом к поверхности забоя, при этом каждый из гидроударных механизмов снабжен клапаном с плавающим подпружиненным...
Пристрій автоматичного керування цифро-аналоговими системами
Номер патенту: 6486
Опубліковано: 29.12.1994
Автор: Плахов Євген Іванович
МПК: H03M 1/70
Мітки: керування, цифро-аналоговими, автоматичного, пристрій, системами
Формула / Реферат:
Устройство автоматического управления цифро-аналоговыми системами, содержащее источник входных импульсов, выход которого подключен к входу делителя частоты, и счетчик, отличающееся тем, что в него дополнительно введены элементы опознавания режима суммирования и режима вычитания, блоки установки задания верхнего значения диапазона и нижнего значения диапазона, блоки совпадения режима суммирования и режима вычитания, блок запуска-сброса,...
Пристрій автоматичного роздільного включення електродвигунів двохдвигунового привіда очистного комбайну
Номер патенту: 7620
Опубліковано: 29.09.1995
Автори: Сірченко Володимир Миколаєвич, Луценко Олександр Савич, Городецький Анатолій Юльєвич, Кіріченко Костянтин Іванович, Клименко Володимир Іванович
МПК: E21C 35/24
Мітки: привіда, двохдвигунового, електродвигунів, роздільного, включення, комбайну, пристрій, очистного, автоматичного
Формула / Реферат:
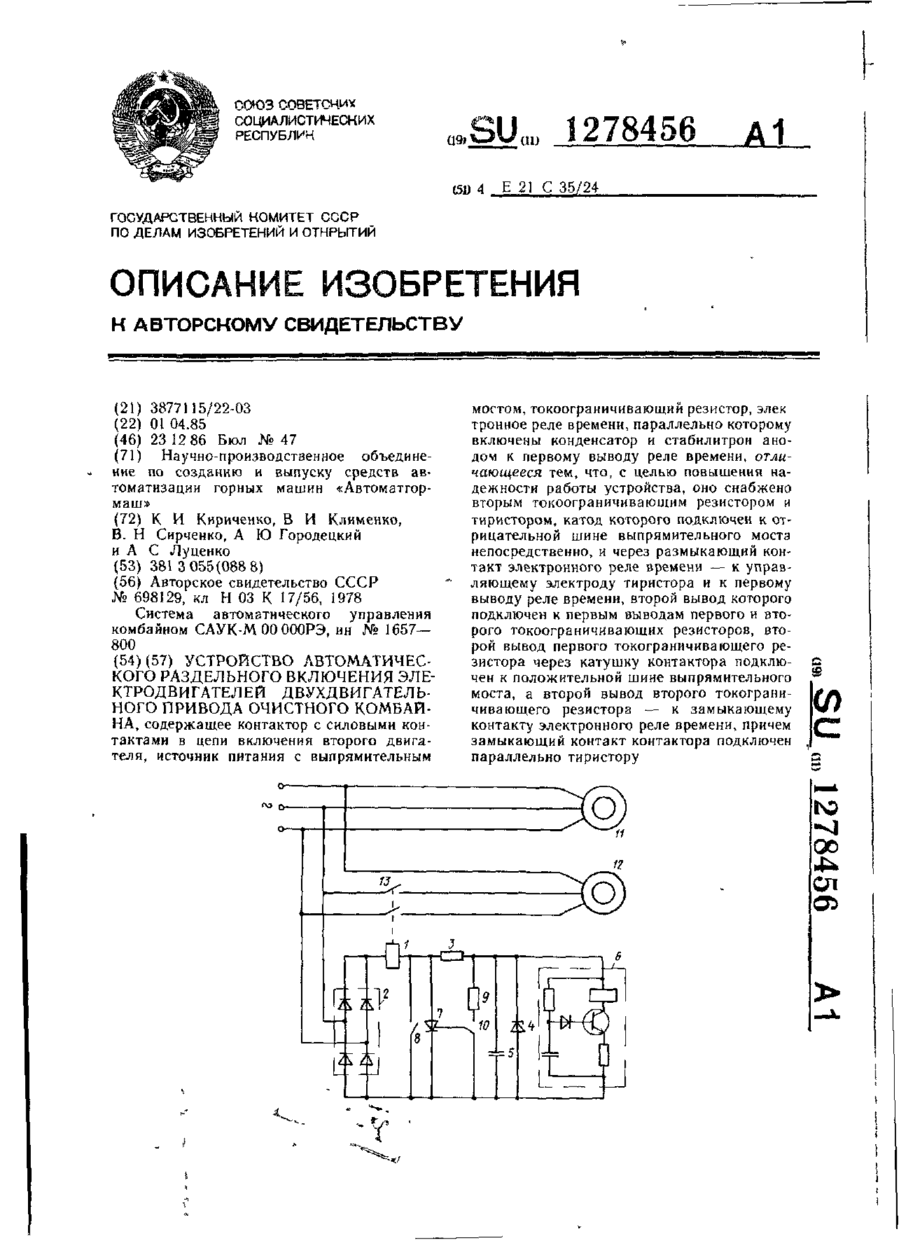
Устройство автоматического раздельного включения электродвигателей двухдвигательного привода очистного комбайна, содержащее контактор с силовыми контактами в цепи включения второго двигателя, источник питания с выпрямительным мостом, токоограничивающий резистор, электронное реле времени, параллельно которому включены конденсатор и стабилитрон анодом к первому выводу реле времени, отличающееся тем, что, с целью повышения надежности работы...
Пристрій для автоматичного визначення часу фільтрування
Номер патенту: 101
Опубліковано: 30.04.1993
Автор: Воробйов Євгеній Ігоревич
МПК: B01D 37/00
Мітки: пристрій, фільтрування, визначення, часу, автоматичного
Формула / Реферат:
Ф о р м у л а и з о б р е т е н и я Устройство для автоматического определения времени фильтрования, содержащее расходомер, установленный на выходном продуктопроводе, интегратор, вход которого связан с выходом расходомера, сумматор, выход которого соединен через нулевое реле с запорным органом на входе фильтра, и блок умножения, первый вход которого связан с выходом блока нелинейности, а выход — с первым входом сумматора, второй вход...
Попередній патент: Фотоприйомний пристрій для контролю положення гірничої машини
Наступний патент: Спосіб управління стріловим виконавчим органом гірничо-прохідницького комбайну
Випадковий патент: Гербіцидний концентрат масляної суспензії