Спосіб індукційного каротажу становленням поля

Формула / Реферат
Спосіб індукційного каротажу становленням поля, що включає дослідження електропровідності навколо свердловинного середовища шляхом виміру питомої електричної провідності, який відрізняється тим, що генераторний контур живлять імпульсами струму постійної амплітуди і вимірюють часову залежність напруги в вимірювальному контурі для кожного положення зонда в свердловині, що збільшує діапазон вимірювання питомої електричної провідності; збільшує кількість незалежно вимірюваних параметрів; усуває необхідність калібровки прямого поля; усуває необхідність температурного градуювання через відсутність впливу температури на вимір; спрощує конструкцію зонда через можливість використання всього двох котушок в зонді.
Текст
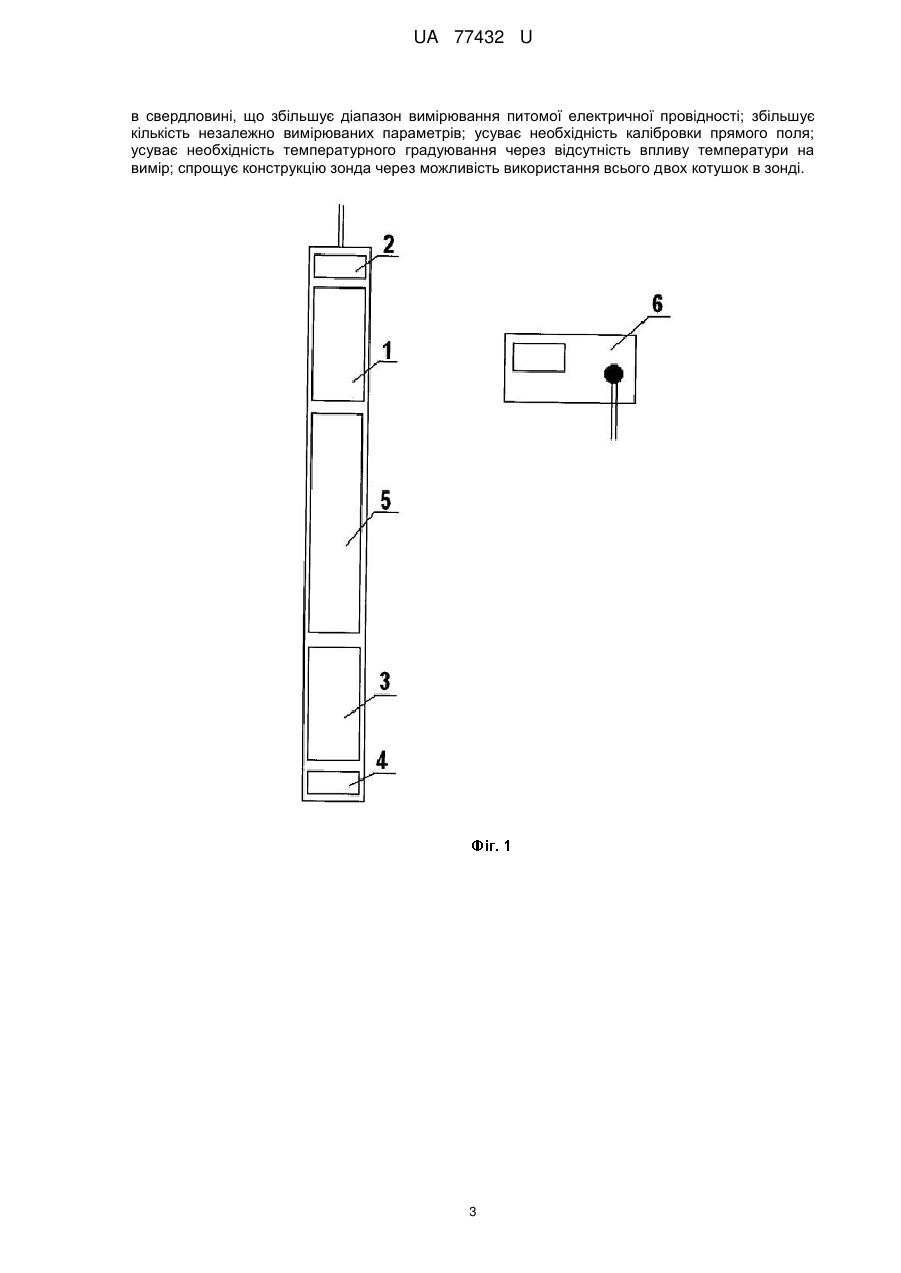
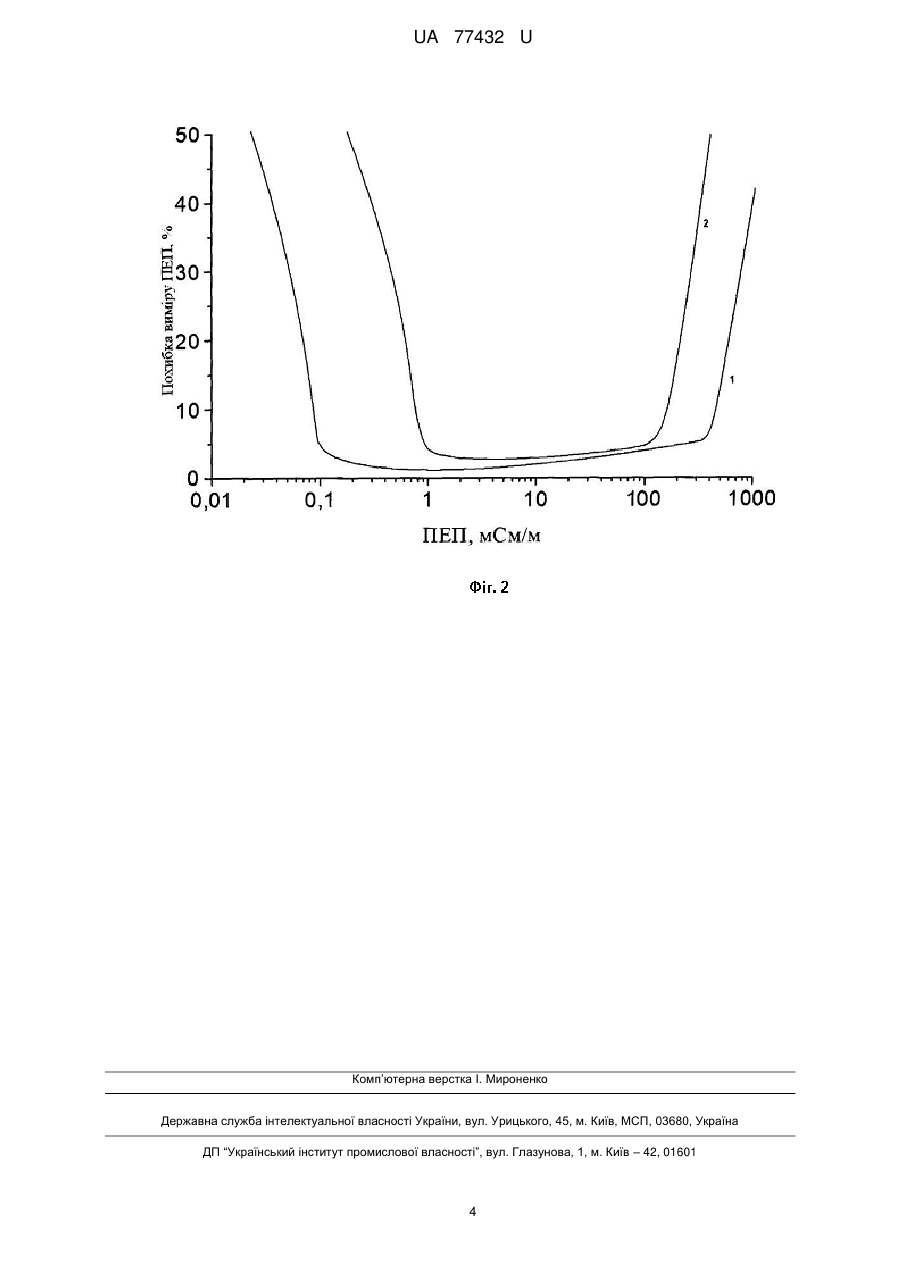
Реферат: UA 77432 U UA 77432 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до області геофізичних досліджень свердловин, зокрема електричних досліджень природних і техногенних геологічних середовищ через інженерногеологічні, гідрогеологічні, екологічні та інші свердловини, в тому числі і моніторингові, і призначена для визначення геоелектричних параметрів пластів, що їх складають (питома електрична провідність (ПЕП) різних частин кожного пласту та інших параметрів). Відомий спосіб низькочастотного індукційного каротажу (ІК) для визначення геоелектричних параметрів пластів [1], в основу якого покладено вимірювання амплітуди монохромної напруги (активної чи одночасно активної і реактивної складової) в вимірювальному контурі зонда, яка виникає внаслідок живлення генераторного контуру змінним струмом постійної амплітуди. Такий спосіб дозволяє визначати один чи два геоелектричних параметри кожного пласту, в залежності від того вимірюється тільки активна чи активна і реактивна складова напруги в вимірювальному контурі. Для збільшення кількості вимірювальних параметрів необхідно одночасне використання необхідної кількості різних за геометрією зондів. Як найближчий аналог корисної моделі вибрано спосіб низькочастотного ІК, реалізований у серійному приладі, що містить один зонд 6Ф1 [2], призначений для вимірювання ПЕП в діапазоні 1-100 мСм/м (за допустимої похибки виміру 5 %). В цьому способі монохромний струм в генераторному контурі зонда індукує пряме магнітне поле, яке в свою чергу індукує струм в провідному середовищі навколо зонда та безпосередньо в вимірювальному контурі (пряме поле). Струм в провідному середовищі індукує вторинне магнітне поле. Внаслідок цього вимірювальний сигнал в вимірювальному контурі є сумою прямого поля та набагато меншого вторинного поля. При цьому провідність середовища навколо зонда характеризує тільки вторинне поле, тобто пряме поле негативно впливає на точність виміру ПЕП. Для спроби зменшення впливу прямого поля в цьому способі використовують більше ніж дві котушки, розташовуючи їх так, щоб сумарне пряме поле дорівнювало нулю [3]. Таке використання більш ніж трьох котушок для зменшення прямого поля призводить до таких недоліків: 1. Виникає необхідність калібровки приладу перед свердловинними дослідженнями таким чином, щоб напруга в вимірювальному контурі в непровідному середовищі (пряме поле) дорівнювала нулю. Наявність навіть незначного прямого поля суттєво спотворює результат виміру. 2. Виникає необхідність температурного градуювання внаслідок лінійного температурного розширення стержня, на якому закріплено котушки зонда, тому що температурне розширення призводить до зміщення котушок і збільшенню прямого поля. Крім того недоліком способу низькочастотного ІК є також і: 3. Вимірюється тільки дві незалежні величини: активна та реактивна складові напруги у вимірювальному контурі. Всі ці недоліки будуть усунені у запропонованій нами корисній моделі. Задачею створення запропонованої корисної моделі є: - збільшення діапазону вимірювання провідності до 0,1-250,0 мСм/м; - збільшення кількості незалежно вимірюваних параметрів; - усунення необхідності калібровки прямого поля; - усунення необхідності температурного градуювання через відсутність впливу температури на вимір; - спрощення конструкцію зонда через можливість використання всього двох котушок в зонді. В основу корисної моделі поставлена задача створити новий спосіб індукційного каротажу становленням поля. Поставлена задача вирішується тим, що у способі індукційного каротажу, згідно з корисною моделлю, здійснюють живлення генераторного контуру імпульсами струму і досліджують часові залежності відповідного перехідного процесу в вимірювальному контурі (дослідження становлення поля). Відома часова залежність перехідного процесу в вимірювальному контурі Ut дозволяє побудувати залежність: Ut U' t , де U - напруга; t - час; Ut - похідна напруги за часом; 1 UA 77432 U 5 І тим самим позбутися постійної величини, що відповідає прямому полю, і яка і є похибкою (що виникає внаслідок неточної калібровки прямого поля, неточного температурного Ut U' t є однозначною градуювання та будь-якої іншої постійної за величиною). Оскільки функцією від ПЕП ( ) то за встановленою залежністю U' ми отримуємо значення а для кожного положення по глибині зонда в свердловині [4]. Оскільки для неоднорідного пласту, що складається з зони проникнення ( З , D - її ПЕП та діаметр відповідно) та неушкодженої Ut t однозначно визначається Ut U' П , З , D П , З , D , то за встановленою залежністю t ми однозначно параметрами отримуємо значення цих трьох параметрів П , З , D , самостійне визначення яких прототипом неможливо. Можливість уникнення калібровки прямого поля дозволяє використовувати тільки дві котушки (одну з'єднану з генераторним контуром, іншу - з вимірювальним), що принципово недосяжно для зондів ІК, які використовують калібровку прямого поля, тим самим суттєво спрощується конструкція приладу. Принципова схема, в якій може бути реалізована запропонована корисна модель, приведена на фіг. 1, де цифрами позначено: 1 - генераторний контур; 2 - котушка генераторного контуру; 3 - вимірювальний контур; 4 - котушка вимірювального контуру; 5 - електронна схема; 6 - наземний блок реєстрації. На фіг. 2 приведено порівняльні залежності похибки виміру ПЕП макетного зразка корисної моделі (крива 1) та прототипу (крива 2) від ПЕП моделі нескінченного однорідного пласту. З фіг. 2 видно, що для макетного зразка корисної моделі інтервал можливих значень ПЕП більший, ніж для прототипу (інтервал ПЕП, що відповідає похибці, меншої за 5 %, для прототипу 1-100 мСм/м, для макетного зразка корисної моделі 0,1-250,0 мСм/м). Тобто, завдяки збільшенню точності виміру розширюється діапазон виміру з допустимою величиною похибки. Технічним результатом корисної моделі є: 1) збільшення діапазону вимірювання провідності до 0,1-250,0 мСм/м, завдяки збільшенню точності виміру; 2) збільшення кількості незалежно вимірюваних параметрів; 3) усунення необхідності калібровки прямого поля; 4) усунення необхідності температурного градуювання через відсутність впливу температури на вимір; 5) спрощення конструкцію зонда через можливість використання всього двох котушок в зонді; 6) здешевлення виготовлення зондів ІК. Джерела інформації: 1. Дебрант Р. Теория и интерпретация результатов геофизических методов исследования скважин. - М.: Недра, 1972.-288 с. 2. Плюснин М.И. Индукционный каротаж. - М: Недра, 1968.-140 с. 3. Техническая инструкция по проведению геофизических исследований и работ приборами на кабеле в нефтяных и газовых скважинах. / Под. ред. Хаматдинова Р.Т. –Москва: Министерство Энергетики "ГЕРС", 2002.-270 с. 4. Миронцов Н.Л. О методе импульсного индукционного каротажа // Доповіді Національної академії наук України.-2010. - № 7. - С. 110-112. буровим розчином зони пласту ( П - її ПЕП) функція 10 15 20 25 30 35 40 45 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 50 Спосіб індукційного каротажу становленням поля, що включає дослідження електропровідності навколо свердловинного середовища шляхом виміру питомої електричної провідності, який відрізняється тим, що генераторний контур живлять імпульсами струму постійної амплітуди і вимірюють часову залежність напруги в вимірювальному контурі для кожного положення зонда 2 UA 77432 U в свердловині, що збільшує діапазон вимірювання питомої електричної провідності; збільшує кількість незалежно вимірюваних параметрів; усуває необхідність калібровки прямого поля; усуває необхідність температурного градуювання через відсутність впливу температури на вимір; спрощує конструкцію зонда через можливість використання всього двох котушок в зонді. 3 UA 77432 U Комп’ютерна верстка І. Мироненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for induction logging with field setting
Автори англійськоюMyrontsov Mykyta Leonidovych
Назва патенту російськоюСпособ индукционного каротажа установкой поля
Автори російськоюМиронцов Никита Леонидович
МПК / Мітки
МПК: G01V 3/00
Мітки: поля, спосіб, каротажу, становленням, індукційного
Код посилання
<a href="https://ua.patents.su/6-77432-sposib-indukcijjnogo-karotazhu-stanovlennyam-polya.html" target="_blank" rel="follow" title="База патентів України">Спосіб індукційного каротажу становленням поля</a>
Спосіб електричного бокового скануючого каротажу
Номер патенту: 76746
Опубліковано: 10.01.2013
Автор: Миронцов Микита Леонідович
МПК: G01V 3/00
Мітки: електричного, каротажу, скануючого, спосіб, бокового
Формула / Реферат:
Спосіб електричного бокового каротажу, який полягає у дослідженні електропровідності навколо свердловинного середовища шляхом виміру уявного електричного опору, який відрізняється тим, що різницю напруги між центральним та екранними електродами змінюють протягом одного виміру для кожного положення зонда в свердловині, що дозволяє одним зондом вимірювати більше одного значення уявного електричного опору для кожного положення зонда в...
Спосіб багатозондового електричного бокового каротажу
Номер патенту: 77338
Опубліковано: 11.02.2013
Автор: Миронцов Микита Леонідович
МПК: G01V 3/00
Мітки: каротажу, спосіб, електричного, бокового, багатозондового
Формула / Реферат:
Спосіб багатозондового електричного бокового каротажу, який полягає у дослідженні електропровідності навколо свердловинного середовища шляхом виміру уявного електричного опору, який відрізняється тим, що вимірюється струм кожного з струмових електродів, що гальванічно з'єднані провідною шиною низького опору, що забезпечує рівність потенціалів струмових електродів відносно оберненого, що збільшує вертикальну роздільну здатність кожного зонда,...
Спосіб визначення температурного поля об’єктів довільної геометричної форми
Номер патенту: 24337
Опубліковано: 25.06.2007
Автори: Хомченко Анатолій Никифорович, Камаєва Світлана Олегівна
Мітки: форми, визначення, геометричної, спосіб, об'єктів, поля, довільно, температурного
Формула / Реферат:
Спосіб визначення температурного поля об'єктів довільної геометричної форми, який ґрунтується на вимірюванні температури в контрольних точках досліджуваного об'єкта, який відрізняється тим, що вимірювання температури здійснюють тільки у граничних контрольних точках, причому вибір технічних засобів вимірювання є довільним, і за допомогою скінченно-елементної апроксимації визначають температурне поле об'єкта, де при скінченно-елементній...
Магнітооптичний спосіб виміру напруженості магнітного поля
Номер патенту: 34036
Опубліковано: 15.02.2001
Автори: Вілесов Юрій Федотович, Грошенко Микола Олександрович, Герасимов Андрій Юр'євич
МПК: G01R 33/00
Мітки: напруженості, магнітооптичний, магнітного, поля, спосіб, виміру
Текст:
...кількість дисклинацій максимальна, та величина фотост руму фотоприймача (5) максимальна. Магнітне поле зменшує кількість дисклинацій ДС та кількість оптичних вихорів у випромінюванні, яке продифрагувало. Величина струму фотоприймача (5) прямо пропорційна кількості оптичних вихорів та обернено-пропорційна напруженості магнітного поля. У магнітному полі з відомою напруженістю виробляють калібровку приладу для виміру напруженості магнітного...
Спосіб визначення температурного поля
Номер патенту: 85889
Опубліковано: 10.03.2009
Автори: Камаєва Світлана Олегівна, Хомченко Анатолій Никифорович
Мітки: визначення, температурного, спосіб, поля
Формула / Реферат:
Спосіб визначення температурного поля, що ґрунтується на вимірюванні температури в контрольних точках досліджуваного об'єкта, який відрізняється тим, що вимірювання температури здійснюють тільки в граничних контрольних точках при довільному виборі технічних засобів вимірювання, а отримані заміри температури використовують як параметри для визначення температурного поля досліджуваного об'єкта за допомогою скінченно-елементної апроксимації за...
Попередній патент: Спосіб підвищення врожайності жита озимого
Наступний патент: Спосіб визначення ккд перетворювальної системи
Випадковий патент: Вулик для диких бджіл