Установка для дослідження вільних коливань механічної системи з двома степенями вільності
Номер патенту: 79920
Опубліковано: 13.05.2013
Автори: Лемента Єгор Олександрович, Лушников Вячеслав Михайлович, Пирогов Володимир Васильович, Кравченко Олег Юрійович, Златопольський Федір Йосипович, Чайковський Олександр Борисович
Формула / Реферат
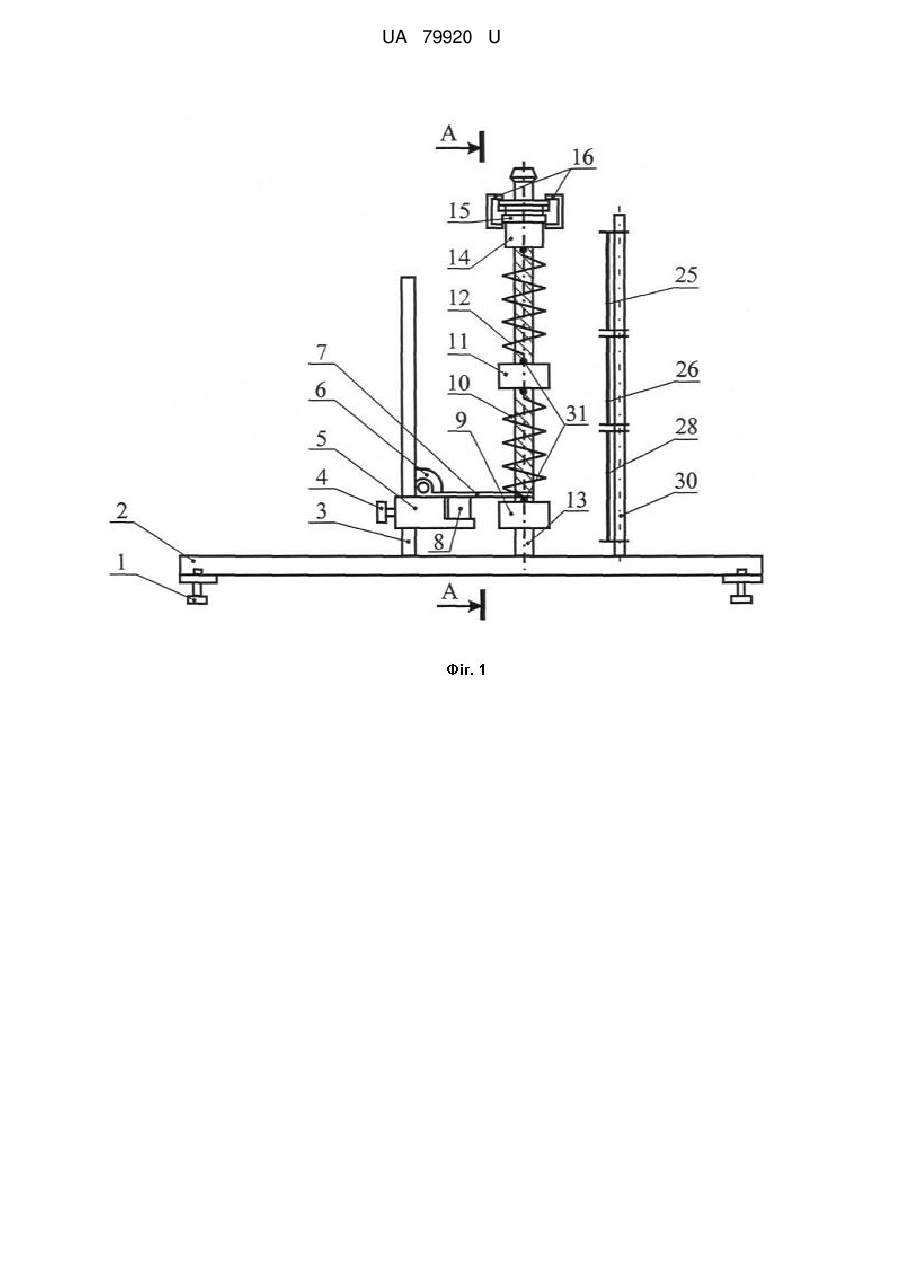
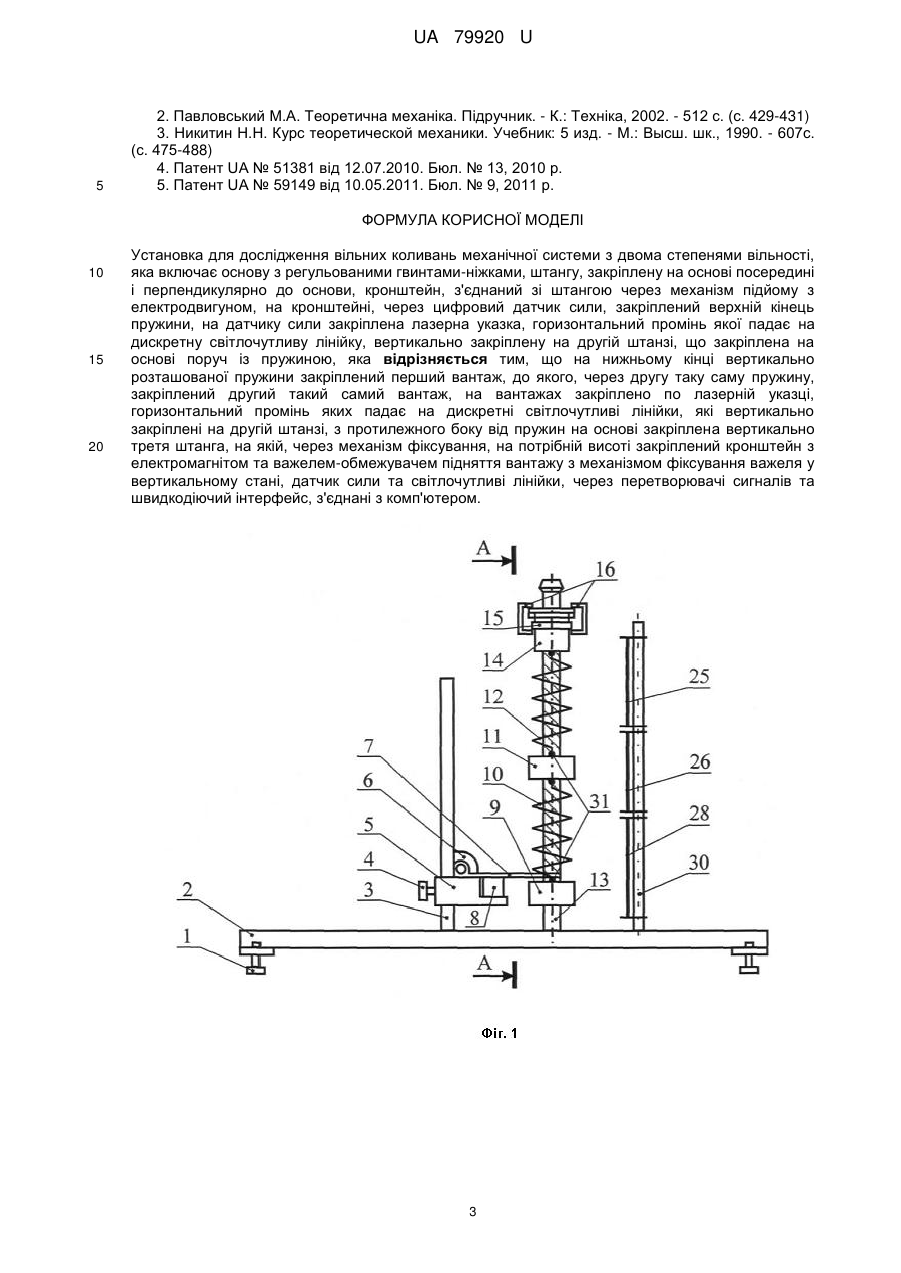
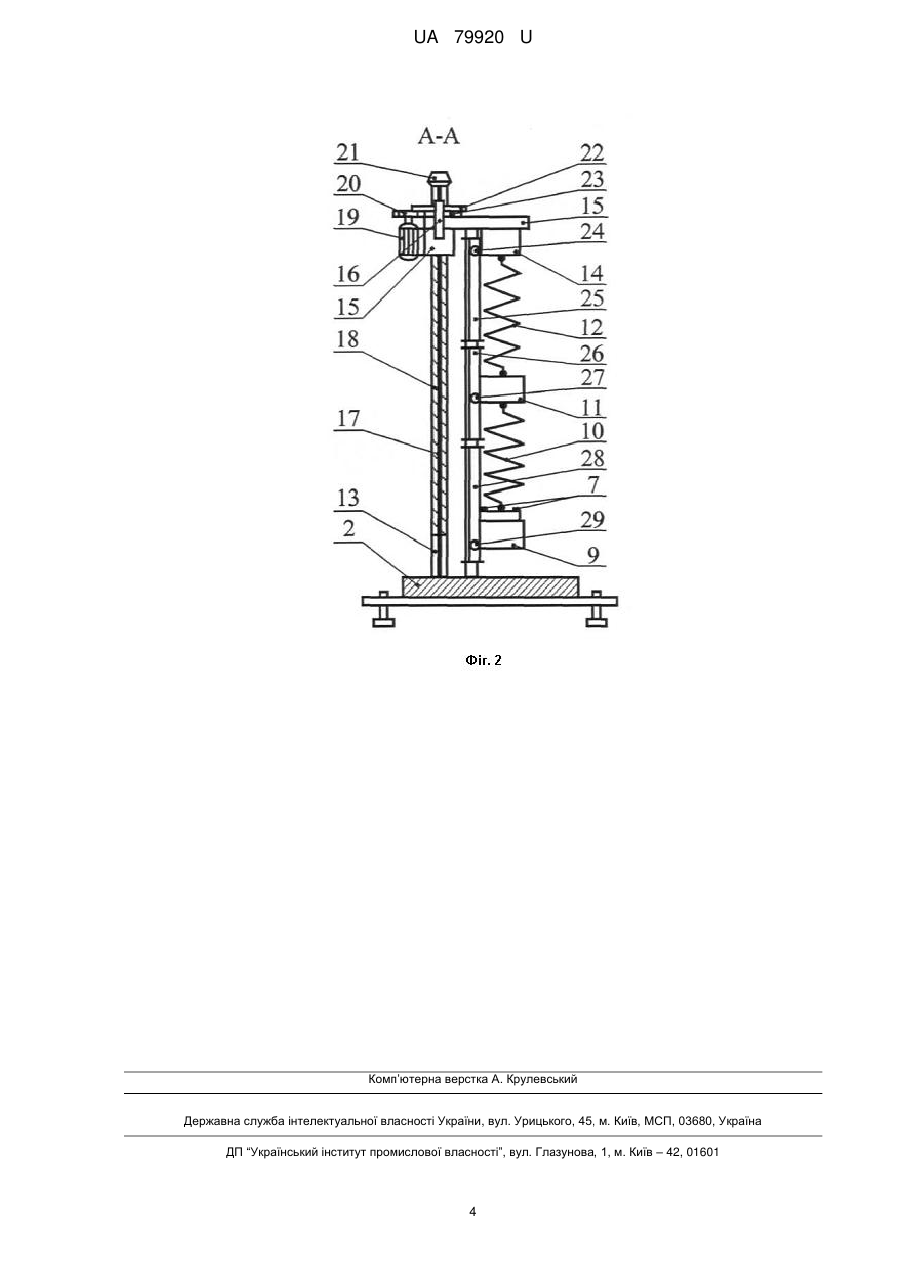
Установка для дослідження вільних коливань механічної системи з двома степенями вільності, яка включає основу з регульованими гвинтами-ніжками, штангу, закріплену на основі посередині і перпендикулярно до основи, кронштейн, з'єднаний зі штангою через механізм підйому з електродвигуном, на кронштейні, через цифровий датчик сили, закріплений верхній кінець пружини, на датчику сили закріплена лазерна указка, горизонтальний промінь якої падає на дискретну світлочутливу лінійку, вертикально закріплену на другій штанзі, що закріплена на основі поруч із пружиною, яка відрізняється тим, що на нижньому кінці вертикально розташованої пружини закріплений перший вантаж, до якого, через другу таку саму пружину, закріплений другий такий самий вантаж, на вантажах закріплено по лазерній указці, горизонтальний промінь яких падає на дискретні світлочутливі лінійки, які вертикально закріплені на другій штанзі, з протилежного боку від пружин на основі закріплена вертикально третя штанга, на якій, через механізм фіксування, на потрібній висоті закріплений кронштейн з електромагнітом та важелем-обмежувачем підняття вантажу з механізмом фіксування важеля у вертикальному стані, датчик сили та світлочутливі лінійки, через перетворювачі сигналів та швидкодіючий інтерфейс, з'єднані з комп'ютером.
Текст
Реферат: Установка для дослідження вільних коливань механічної системи з двома степенями вільності включає основу з регульованими гвинтами-ніжками, штангу, закріплену на основі посередині і перпендикулярно до основи, кронштейн, з'єднаний зі штангою через механізм підйому з електродвигуном, на кронштейні, через цифровий датчик сили, закріплений верхній кінець пружини, на датчику сили закріплена лазерна указка, горизонтальний промінь якої падає на дискретну світлочутливу лінійку, вертикально закріплену на другій штанзі, що закріплена на основі поруч із пружиною. На нижньому кінці вертикально розташованої пружини закріплений перший вантаж, до якого, через другу таку саму пружину, закріплений другий такий самий вантаж, на вантажах закріплено по лазерній указці. UA 79920 U (12) UA 79920 U UA 79920 U 5 10 15 20 25 Корисна модель належить до галузі випробувальної техніки і може бути використана для дослідження вільних (власних) коливань механічної системи з двома степенями вільності. Найпростішою коливальною механічною системою, що має два степеня вільності, є два вантажі масами m1 та m2 підвішені на вертикально розташованих пружинах жорсткістю с1 та c2. Аналітичні дослідження такої коливальної системи розглянуті в роботах [1-3]. Було встановлено, що рух системи з двома степенями вільності складається з двох незалежних коливань: x1=А1sin(1t+1)+A2sin(2t+2), х2=1A1sin(1t+1)+2А2sin(2t+2). (1) Ці коливання, що відбуваються з частотами відповідно 1 і 2, називають головними коливаннями. Коефіцієнти 1 і 2 визначають форми коливань і показують, у скільки разів амплітуда відповідного головного коливання в одній з координат більша (або менша) від амплітуди іншої. Зауважимо, що колові частоти власних коливань 1 і 2, а також коефіцієнти форм коливань 1 і 2, є основними характеристиками коливань систем з двома степенями вільності. A1, А2, 1, 2 - довільні сталі, що визначаються з початкових умов. Рівняння (1) відповідають диференціальним рівнянням руху системи [2]: m11 c1x1 c 2 x1 x 2 0, x (2) m2 2 c 2 x 2 x1 0. x Рівняння (2) отримані згідно із законом руху кожного вантажу з урахуванням того, що при відхиленні вантажів від стану рівноваги на них діють реакції пружин, пропорційні їх відхиленню від цього стану. Зауважимо, що х1 і x2 відраховуються від стану рівноваги вантажів. У першому головному коливанні знаки х1 і х2 однакові, тобто, вантажі рухаються в один бік; у другому головному коливанні знаки різні. Це означає, що коефіцієнти форм коливань можуть бути додатними і від'ємними. Якщо 1>0, то х1 і х2 мають однакові фази; якщо 20, то 2 1 1618 , 35 знаки зміщення x11 та 1 в першому головному коливанні однакові і коливання вантажів 2 співпадають по фазі. Друге головне коливання з частотою 2 включає в себе зміщення x 2 та 1 x 2 2 x12 . Так як 2
ДивитисяДодаткова інформація
Назва патенту англійськоюInstallation for study of free vibrations of a mechanical system with two degrees of freedom
Автори англійськоюLushnikov Viacheslav Mykhailovych, Chaikovskyi Oleksandr Borysovych, Zlatopolskyi Fedir Yosypovych, Pyrohov Volodymyr Vasyliovych, Kravchenko Oleh Yuriiovych, Lementa Yehor Oleksandrovych
Назва патенту російськоюУстановка для исследования свободных колебаний механической системы с двумя степенями свободы
Автори російськоюЛушников Вячеслав Михайлович, Чайковський Александр Борисович, Златопольский Федор Иосифович, Пирогов Владимир Васильевич, Кравченко Олег Юрьевич, Лемента Егор Александрович
МПК / Мітки
МПК: G01M 13/00
Мітки: установка, коливань, вільності, системі, двома, вільних, механічної, дослідження, степенями
Код посилання
<a href="https://ua.patents.su/6-79920-ustanovka-dlya-doslidzhennya-vilnikh-kolivan-mekhanichno-sistemi-z-dvoma-stepenyami-vilnosti.html" target="_blank" rel="follow" title="База патентів України">Установка для дослідження вільних коливань механічної системи з двома степенями вільності</a>
Установка для дослідження вільних коливань систем з одним ступенем вільності
Номер патенту: 51381
Опубліковано: 12.07.2010
Автори: Златопольський Федір Йосипович, Чайковський Олександр Борисович, Лушников Вячеслав Михайлович, Лук'яненко Сергій Володимирович, Свяцька Лілія Петрівна
МПК: G01M 13/00
Мітки: дослідження, вільних, систем, одним, коливань, ступенем, вільності, установка
Формула / Реферат:
Установка для дослідження вільних коливань систем з одним ступенем вільності, яка включає основу з регульованими ніжками-гвинтами, закріплену на основі вертикальну штангу з кронштейном, який переміщується по штанзі і закріплюється на потрібній висоті, вантаж, підвішений на вертикально розміщеній пружині, електромагніт, яка відрізняється тим, що електромагніт, який утримує вантаж у вихідному стані, закріплений напроти штанги на одному кінці...
Установка для дослідження вільних коливань вантажу, підвішеного на вертикально розташованій пружині
Номер патенту: 53502
Опубліковано: 11.10.2010
Автори: Чайковський Олександр Борисович, Волков Ігор Васильович, Лук'яненко Сергій Володимирович, Лушников Вячеслав Михайлович
МПК: G01M 13/00
Мітки: установка, підвішеного, пружини, вільних, вантажу, вертикальної, дослідження, розташований, коливань
Формула / Реферат:
Установка для дослідження вільних коливань вантажу, підвішеного на вертикально розташованій пружині, що містить: основу з регульованими ніжками-гвинтами; закріплену на основі вертикальну штангу з кронштейном, який переміщується по штанзі і закріплюється на потрібній висоті; вантаж, підвішений на вертикально розміщеній пружині; електромагніт, яка відрізняється тим, що електромагніт, утримуючий вантаж у вихідному стані, закріплений напроти...
Установка для дослідження згинальних коливань балки з однією пружною опорою при дії ударного навантаження
Номер патенту: 52722
Опубліковано: 10.09.2010
Автори: Свяцька Лілія Петрівна, Лушников Вячеслав Михайлович, Чайковський Олександр Борисович, Златопольський Федір Йосипович, Лук'яненко Сергій Володимирович
МПК: G01M 7/00
Мітки: коливань, установка, однією, опорою, навантаження, пружною, балки, дослідження, згинальних, дії, ударного
Формула / Реферат:
Установка для дослідження згинальних коливань балки з однією пружною опорою при дії ударного навантаження, яка містить основу з регульованими гвинтами-ніжками, зразок-балку прямокутного перерізу, що опирається на закріплені на основі шарнірно-нерухому і шарнірно-рухому опори, штангу, закріплену на основі в середині між опорами і перпендикулярно до основи, вантаж, який утримується у вихідному стані електромагнітом, закріпленим на кронштейні,...
Установка для дослідження витих пружин при статичному та динамічному навантаженні
Номер патенту: 59149
Опубліковано: 10.05.2011
Автори: Златопольський Федір Йосипович, Тернавський Павло Анатолійович, Кравченко Олег Юрійович, Лушников Вячеслав Михайлович, Лук'яненко Сергій Володимирович, Чайковський Олександр Борисович, Мельстер Тарас Юрійович
МПК: G01M 13/00
Мітки: дослідження, статичному, установка, навантаженні, витих, пружин, динамічному
Формула / Реферат:
Установка для дослідження витих пружин при статичному та динамічному навантаженні, яка містить основу з регульованими гвинтами-ніжками, штангу, закріплену на основі всередині і перпендикулярно до основи, кронштейн, переміщенням якого по штанзі встановлюється задана висота, електромагніт, яка відрізняється тим, що кронштейн, з'єднаний із штангою через цифровий датчик сили, закріплений на верхньому кінці випробувальної пружини, на нижньому...
Установка для дослідження витих пружин
Номер патенту: 59147
Опубліковано: 10.05.2011
Автори: Мельстер Тарас Юрійович, Златопольський Федір Йосипович, Чайковський Олександр Борисович, Лук'яненко Сергій Володимирович, Тернавський Павло Анатолійович, Лушников Вячеслав Михайлович, Кравченко Олег Юрійович
МПК: G01M 13/00
Мітки: дослідження, пружин, витих, установка
Формула / Реферат:
Установка для дослідження витих пружин, яка містить основу з регульованими гвинтами-ніжками, штангу, закріплену на основі всередині і перпендикулярно до основи, кронштейн, переміщенням якого по штанзі встановлюється задана висота, яка відрізняється тим, що кронштейн з'єднаний із штангою через механізм підняття з електродвигуном, на кронштейні через цифровий датчик сили закріплений верхній кінець випробувальної пружини, нижній кінець...
Попередній патент: Спосіб оцінки екстер’єру молочної худоби
Наступний патент: Опорна приставка до милиць
Випадковий патент: Спосіб відеоасистованої голкової біопсії периферичного новоутворення легені