Спосіб автоматичного регулювання електроімпульсних установок
Номер патенту: 83379
Опубліковано: 10.07.2008
Автори: Вовченко Олександр Іванович, Назарова Наталя Станіславівна, Козирєв Сергій Сергійович
Формула / Реферат
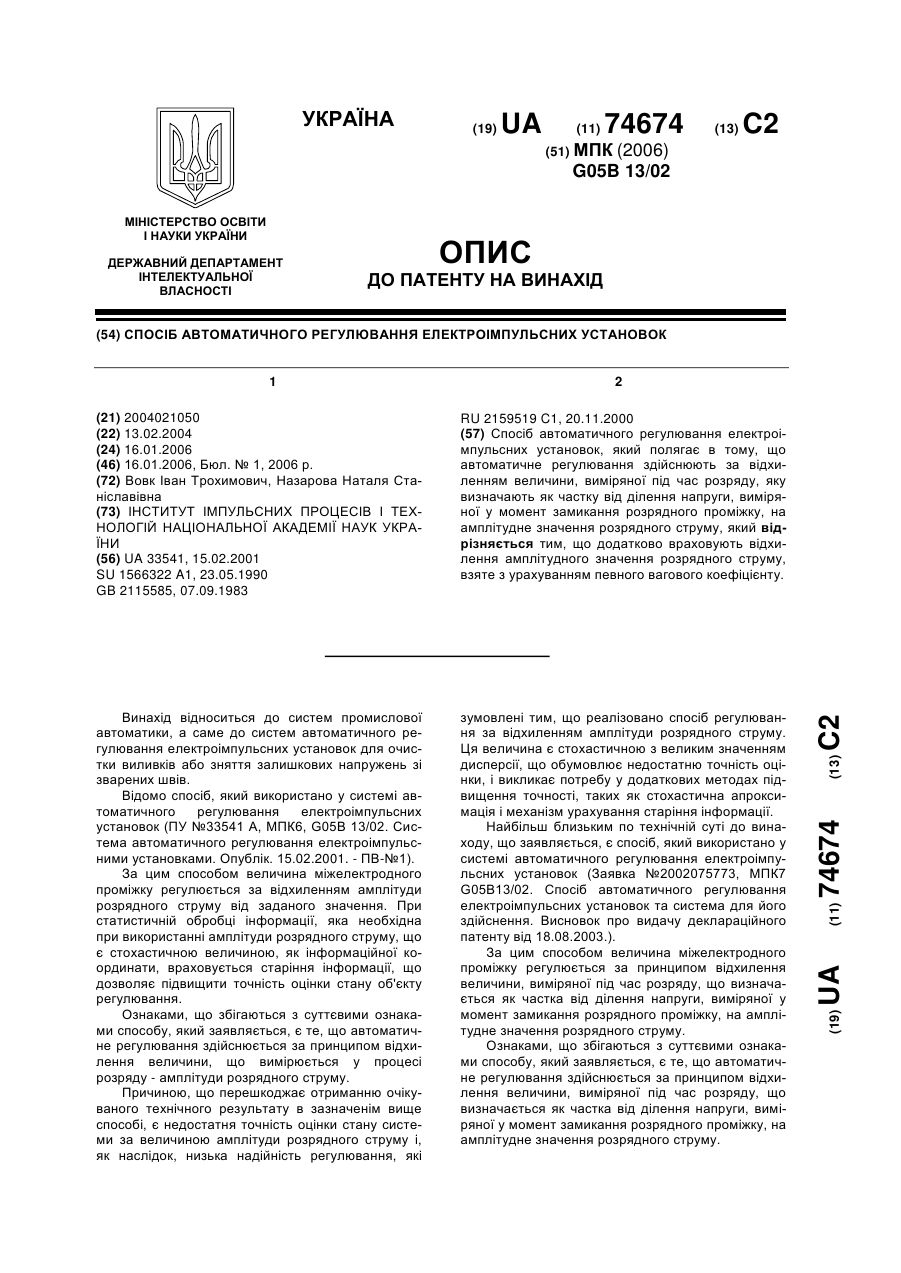
Спосіб автоматичного регулювання електроімпульсних установок, який полягає в тому, що автоматичне регулювання здійснюють за відхиленням вихідної величини, яку визначають як суму частки від ділення напруги, виміряної у момент замикання розрядного проміжку, на амплітудне значення розрядного струму та амплітудного значення розрядного струму, взятого з певним ваговим коефіцієнтом, з урахуванням заданого допустимого відхилення, який відрізняється тим, що додатково регулювання здійснюють через канал регулюючого впливу шляхом порівняння виміряних горизонтальної і вертикальної складових швидкості руху електрода, за результатом якого визначають вертикальна чи горизонтальна координата електрода підлягає регулюванню за відхиленням вихідної величини в поточний момент при просторовому русі електрода над складною поверхнею оброблюваної деталі.
Текст
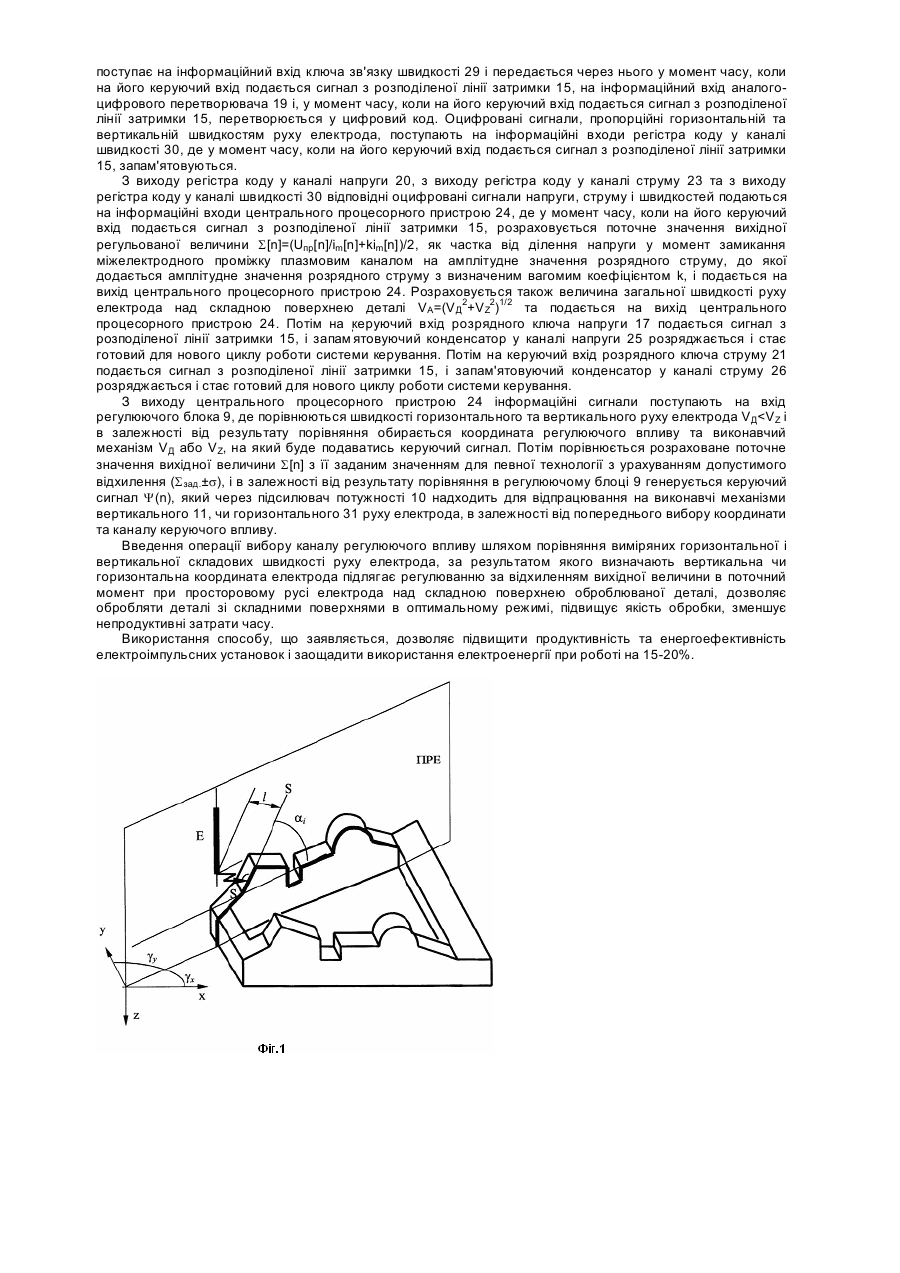
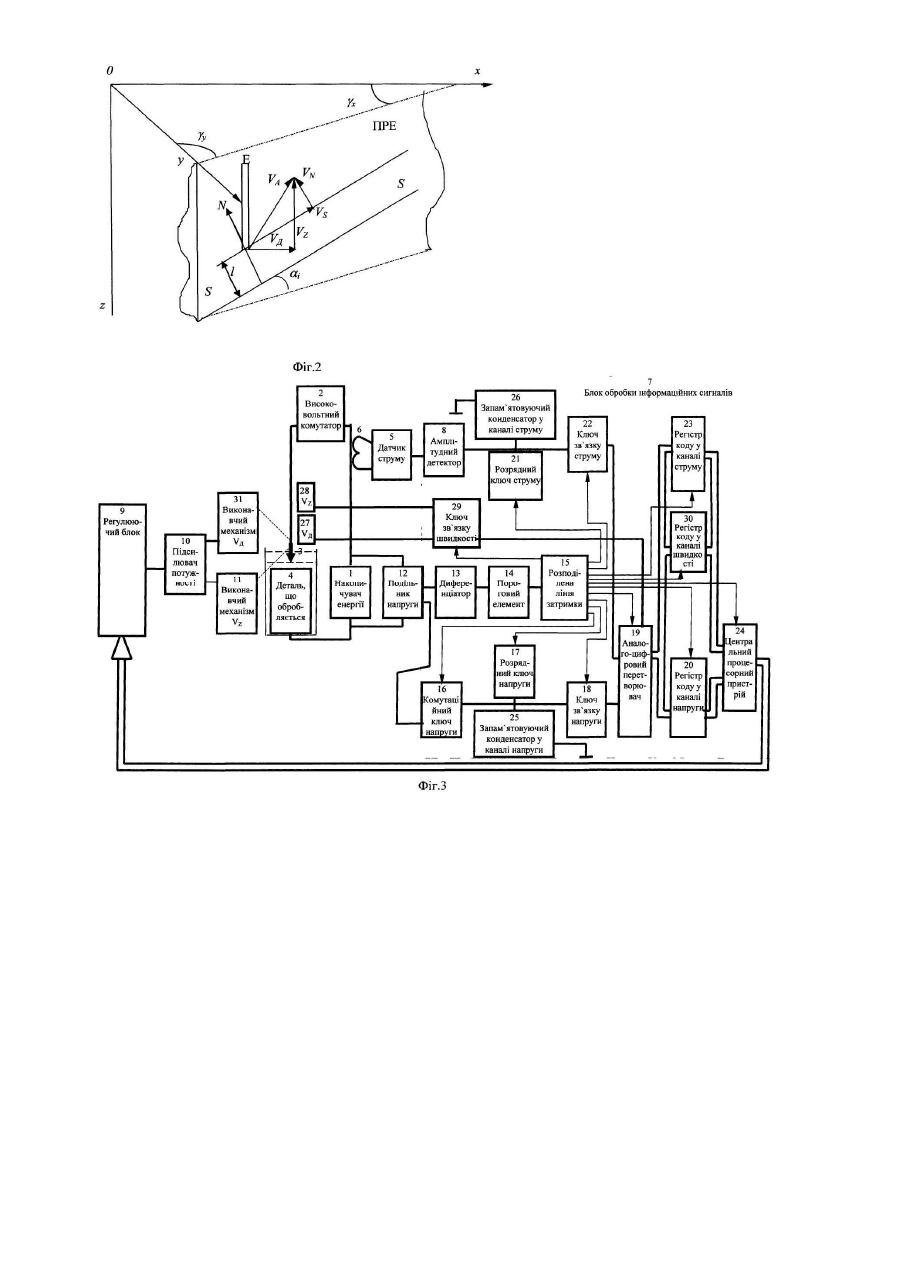
Винахід відноситься до систем промислової автоматики, а саме до систем автоматичного регулювання електроімпульсних установок для очистки виливків або зняття залишкових напружень зі зварних швів. Відомо спосіб, який використано у системі автоматичного регулювання електроімпульсних установок [Патент України №64066А, МПК7 G05B13/02. Спосіб автоматичного регулювання електроімпульсних установок та система для його здійснення. Опублік. 16.02.2004. - Бюл. №2]. За цим способом регулювання здійснюють за відхиленням величини, що визначається як частка від ділення напруги, виміряної у момент замикання розрядного проміжку, на амплітудне значення розрядного струму. Ознаками, що збігаються з суттєвими ознаками способу, який заявляється, є такі: автоматичне регулювання здійснюють за відхиленням величини, яку визначають як частку від ділення напруги, виміряної у момент замикання розрядного проміжку, на амплітудне значення розрядного струму. Причиною, що перешкоджає отриманню очікуваного технічного результату в зазначенім вище способі, є недостатня точність оцінки стану системи за вказаною величиною, яка є стохастичною з відносно великим значенням дисперсії. Це обумовлює недостатню точність оцінки стану об'єкта і, як наслідок, низьку надійність регулювання, яка зумовлена тим, що реалізовано спосіб регулювання за відхиленням даної величини з низьким рівнем інформативності. Найбільш близьким по технічній суті до винаходу, що заявляється, є спосіб, який використано у системі автоматичного регулювання електроімпульсних установок [Патент України на винахід №74674, ΜΠК (2006) G05B13/02. Спосіб автоматичного регулювання електроімпульсних установок. Опублік. 16.01.2006. - Бюл. №1]. За цим способом автоматичне регулювання електроімпульсних установок здійснюють за відхиленням величини, яку визначають як суму частки від ділення напруги, виміряної у момент замикання розрядного проміжку, на амплітудне значення розрядного струму та амплітудного значення розрядного струму, взятого з певним ваговим коефіцієнтом, з урахуванням допустимого відхилення. Ознаками, що збігаються з суттєвими ознаками способу, який заявляється, є такі: автоматичне регулювання здійснюють за відхиленням величини, яку визначають як суму частки від ділення напруги, виміряної у момент замикання розрядного проміжку, на амплітудне значення розрядного струму та амплітудного значення розрядного струму, взятого з певним ваговим коефіцієнтом, з урахуванням допустимого відхилення. Причиною, що перешкоджає отриманню очікуваного технічного результату в зазначенім вище способі, є та обставина, що регулювання розрядного міжелектродного проміжку, що є каналом регулюючого впливу, здійснюють тільки по вертикальній координаті руху електрода. Це дає змогу підтримувати заданий режим роботи тільки при обробці деталей, що мають близьку до горизонтальної поверхню, над якою рухається електрод під дією горизонтального нерегульованого приводу, а необхідну величину розрядного проміжку забезпечує регулювання приводу вертикального руху електрода. При обробці деталей, які мають складну поверхню з суттєвими перепадами висоти та значними за площею нахилими або вертикальними поверхнями, виникає необхідність забезпечувати регулювання процесу електроімпульсної обробки при просторовому русі електрода над складною поверхнею оброблюваної деталі, коли розряд може відбуватися як на горизонтальну так і на вертикальну поверхню оброблюваної деталі. При цьому розрядний проміжок, який є каналом керуючого впливу на режим електроімпульсної обробки, може мати як горизонтальне так і вертикальне положення і необхідно керувати як горизонтальним так і вертикальним координатним приводом електрода для підтримання необхідної величини розрядного проміжку, що забезпечує оптимальний режим розряду. Тобто у такому випадку виникає додаткове завдання визначення координати електрода, що підлягає регулюючому впливу, та координатного приводу, на який повинен подаватися керуючий сигнал в той чи інший момент, при регулюванні процесу електроімпульсної обробки за відхиленням вище вказаної вихідної величини. В основу винаходу поставлено задачу створити спосіб автоматичного регулювання електроімпульсних установок, в якому введення нової операції дасть можливість обробляти деталі, що мають складні поверхні, в оптимальному режимі без зупинок електроімпульсних установок для зміни положення деталей за рахунок забезпечення можливості регулювання як при вертикальному так і при горизонтальному положенні каналу розряду. Це підвищить точність та ефективність регулювання режиму обробки деталей зі складними поверхнями, зменшить непродуктивні затрати часу, підвищить продуктивність та енергоефективність електроімпульсних установок на 15-20%. Суть способу, який заявляється, полягає в тому, що автоматичне регулювання здійснюють за відхиленням вихідної величини, яку визначають як суму частки від ділення напруги, виміряної у момент замикання розрядного проміжку, на амплітудне значення розрядного струму та амплітудного значення розрядного струму, взятого з певним ваговим коефіцієнтом, з урахуванням заданого допустимого відхилення, згідно з винаходом, додатково обирають канал регулюючого впливу шляхом порівняння виміряних горизонтальної і вертикальної складових швидкості руху електрода, за результатом якого визначають вертикальна чи горизонтальна координата електрода підлягає регулюванню за відхиленням вихідної величини в поточний момент при просторовому русі електрода над складною поверхнею оброблюваної деталі. Розкриваючи причинно-наслідковий зв'язок між сукупністю ознак способу, що заявляється і технічним результатом, якого можна досягти, необхідно відзначити, що визначення координати електрода, яка є каналом керуючого впливу та підлягає регулюванню при просторовому русі електрода над поверхнею оброблюваної деталі, та регулювання відповідно горизонтального чи вертикального координатних приводів дає можливість обробляти в оптимальному режимі деталі, що мають складні поверхні, тому що при обробці таких деталей з суттєвими перепадами висоти та значними за площею «нахилими або вертикальними поверхнями, виникає необхідність забезпечувати регулювання процесу електроімпульсної обробки, коли розряд може відбуватися як на горизонтальну так і на вертикальну поверхню оброблюваної деталі. При цьому розрядний проміжок, який є каналом керуючого впливу на режим електроімпульсної обробки, може мати як горизонтальне так і вертикальне положення і необхідно керувати як горизонтальним так і вертикальним координатним приводом електрода для підтримання величини розрядного проміжку, що забезпечує задане значення регульованої величини, за відхиленням якої здійснюється регулювання режиму розряду. Тобто у такому випадку виникає додаткове завдання визначення координати електрода, що підлягає регулюючому впливу, та координатного приводу, на який повинен подаватися керуючий сигнал в той чи інший момент, при регулюванні процесу електроімпульсної обробки за відхиленням вище вказаної величини. При відсутності операції визначення координати керуючого впливу, в разі наближення електрода до вертикальної або близької до вертикального положення поверхні, регулювання вертикальної координати втрачає сенс, так як не впливає на режим розряду, оскільки розряд відбувається на вертикальну поверхню і канал розряду має горизонтальне положення, тому рух електрода по вертикальній координаті не змінює величини розрядного проміжку і об'єкт стає некерованим. Схема руху електрода при електроімпульсній обробці деталі зі складною формою поверхні показана на Фіг.1. Електрод рухається в трьохвимірному просторі в площині руху електрода ПРЕ за допомогою горизонтального та вертикального електроприводів, кінематично з'єднаних з електродною системою Е, в напрямі SS на відстані l від поверхні деталі, яка відповідає оптимальній величині міжелектродного розрядного проміжку. Конфігурація поверхні деталі характеризується кутом підйому a i. Спосіб, що заявляється, повинен забезпечити задану величину поточного значення l[n], яка визначається просторовими координатами електрода та геометрією поверхні деталі. Просторові координати електрода залежать від складових швидкості руху електрода. Схема взаємозв'язку складових швидкості руху електрода показана на Фіг.2: VA - вектор результуючої швидкості руху електрода над поверхнею деталі; VД вектор горизонтальної складової швидкості руху електрода; VZ - вектор вертикальної складової швидкості руху електрода; VN - нормальна до поверхні деталі складова швидкості руху електрода; VS - дотична до поверхні деталі складова швидкості руху електрода, a i - кут між оброблюваною поверхнею деталі (SS) та горизонтальною площиною. Швидкість руху електрода VA=(VД2+VZ2)1/2, яка разом з частотою розрядних імпульсів визначає продуктивність обробки поверхні, задається перед початком процесу (VA=Vзад.) Режим розряду, який визначає якість обробки і характеризується значенням регульованої величини, необхідно підтримувати в процесі роботи, змінюючи величину розрядного проміжку, що є каналом керуючого впливу, за допомогою горизонтального (a i45°) приводу електрода в залежності від значення кута підйому поверхні a i, який впливає на положення каналу розряду l та визначається співвідношенням складових швидкості руху електрода (VД45° ; VД>VZ при a i
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for automated control of electro-pulse installations
Автори англійськоюKozyrev Serhii Serhiiovych, Nazarova Natalia Stanislavivna, Vovchenko Oleksandr Ivanovych
Назва патенту російськоюСпособ автоматической регулировки электроимпульсных установок
Автори російськоюКозырев Сергей Сергеевич, Назарова Наталья Станиславовна, Вовченко Александр Иванович
МПК / Мітки
МПК: B23K 9/12, G05B 13/02
Мітки: спосіб, регулювання, установок, електроімпульсних, автоматичного
Код посилання
<a href="https://ua.patents.su/6-83379-sposib-avtomatichnogo-regulyuvannya-elektroimpulsnikh-ustanovok.html" target="_blank" rel="follow" title="База патентів України">Спосіб автоматичного регулювання електроімпульсних установок</a>
Спосіб автоматичного регулювання електроімпульсних установок
Номер патенту: 74674
Опубліковано: 16.01.2006
Автори: Вовк Іван Трохимович, Назарова Наталя Станіславівна
МПК: G05B 13/02
Мітки: спосіб, регулювання, автоматичного, установок, електроімпульсних
Формула / Реферат:
Спосіб автоматичного регулювання електроімпульсних установок, який полягає в тому, що автоматичне регулювання здійснюють за відхиленням величини, виміряної під час розряду, яку визначають як частку від ділення напруги, виміряної у момент замикання розрядного проміжку, на амплітудне значення розрядного струму, який відрізняється тим, що додатково враховують відхилення амплітудного значення розрядного струму, взяте з урахуванням певного...
Спосіб автоматичного регулювання електроімпульсних установок
Номер патенту: 17153
Опубліковано: 15.09.2006
Автори: Назарова Наталя Станіславівна, Козирєв Сергій Сергійович
МПК: G05B 13/02
Мітки: регулювання, спосіб, автоматичного, установок, електроімпульсних
Формула / Реферат:
Спосіб автоматичного регулювання електроімпульсних установок, при якому автоматичне регулювання здійснюють за відхиленням вихідної величини, яку визначають як суму частки від ділення напруги, виміряної у момент замикання розрядного проміжку, на амплітудне значення розрядного струму та амплітудного значення розрядного струму, взятого з певним ваговим коефіцієнтом, з урахуванням заданого допустимого відхилення, який відрізняється тим, що...
Спосіб автоматичного регулювання електроімпульсних установок та система для його здійснення
Номер патенту: 64066
Опубліковано: 16.02.2004
Автори: Вовк Іван Трохимович, Назарова Наталя Станіславівна
МПК: G05B 13/02
Мітки: система, спосіб, електроімпульсних, автоматичного, установок, регулювання, здійснення
Формула / Реферат:
1. Спосіб автоматичного регулювання електроімпульсних установок, який полягає в тому, що автоматичне регулювання здійснюють за принципом відхилення величини, виміряної під час розряду, який відрізняється тим, що величину відхилення визначають як частку від ділення напруги, виміряної у момент замикання розрядного проміжку, на амплітудне значення розрядного струму.2. Система автоматичного регулювання електроімпульсних установок, що...
Система автоматичного регулювання електроімпульсних установок
Номер патенту: 33541
Опубліковано: 15.02.2001
Автори: Назарова Наталя Станіславівна, Вовк Іван Трофимович
МПК: G05B 13/02
Мітки: установок, автоматичного, система, регулювання, електроімпульсних
Текст:
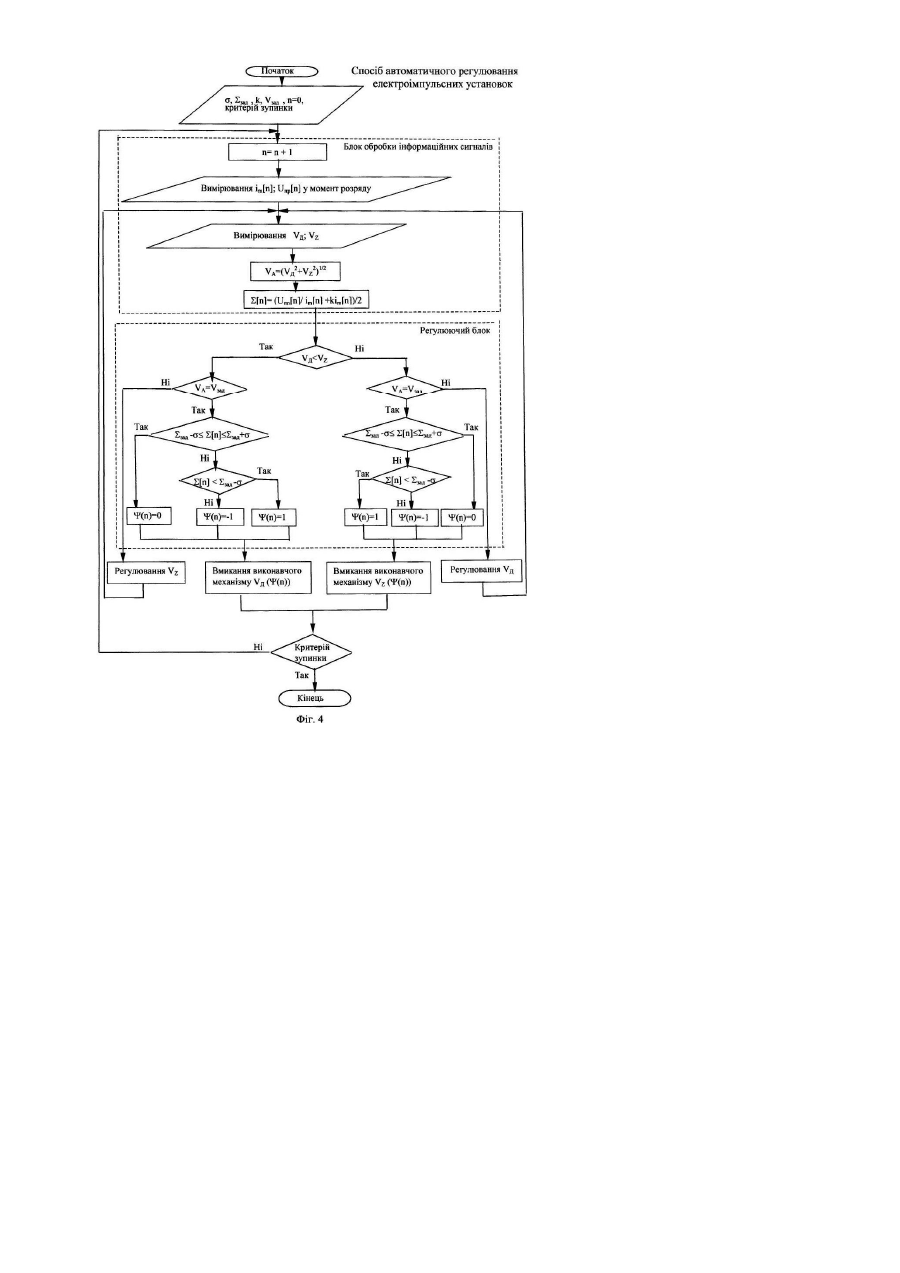
...сигналів 7. Перший вхід блоку 7 з'єднаний послідовно з амплітудним детектором 13, повторювачем 14, першим входом ключа зв'язку 15, першим входом апроксиматора 16 і виходом блоку 7. Другий вхід блоку 7 послідовно з'єднаний з другим входом апроксиматора 16 і виходом блоку 7. Третій вхід блоку 7 послідовно з'єднаний з формувачем сигналу управління 17, першою лінією затримки 18, другою лінією затримки 19 і розрядним ключем 20. До виходу першої...
Спосіб регулювання потужності топки спалювальних установок
Номер патенту: 53666
Опубліковано: 17.02.2003
Автори: Шпіхаль Петер, Мартін Йоханнес Йозеф Едмунд
Мітки: установок, регулювання, топки, спалювальних, спосіб, потужності
Формула / Реферат:
1. Спосіб регулювання потужності топки спалювальних установок, зокрема установок для спалювання відходів, при якому матеріал, що спалюється, завантажують на початку колосникової решітки, піддають на ній шурувальному і поступальному переміщенню і вивантажують на кінці колосникової решітки шлак, що утворюється, який відрізняється тим, що здійснюють, принаймні, один вплив на шурувальний і поступальний рух матеріалу, що спалюється, залежно від...