Спосіб автоматичного регулювання електроімпульсних установок
Номер патенту: 17153
Опубліковано: 15.09.2006
Автори: Козирєв Сергій Сергійович, Назарова Наталя Станіславівна
Формула / Реферат
Спосіб автоматичного регулювання електроімпульсних установок, при якому автоматичне регулювання здійснюють за відхиленням вихідної величини, яку визначають як суму частки від ділення напруги, виміряної у момент замикання розрядного проміжку, на амплітудне значення розрядного струму та амплітудного значення розрядного струму, взятого з певним ваговим коефіцієнтом, з урахуванням заданого допустимого відхилення, який відрізняється тим, що вводять корекцію заданого допустимого відхилення вихідної величини в залежності від питомого опору рідини, в якій відбувається імпульсний електророзряд.
Текст
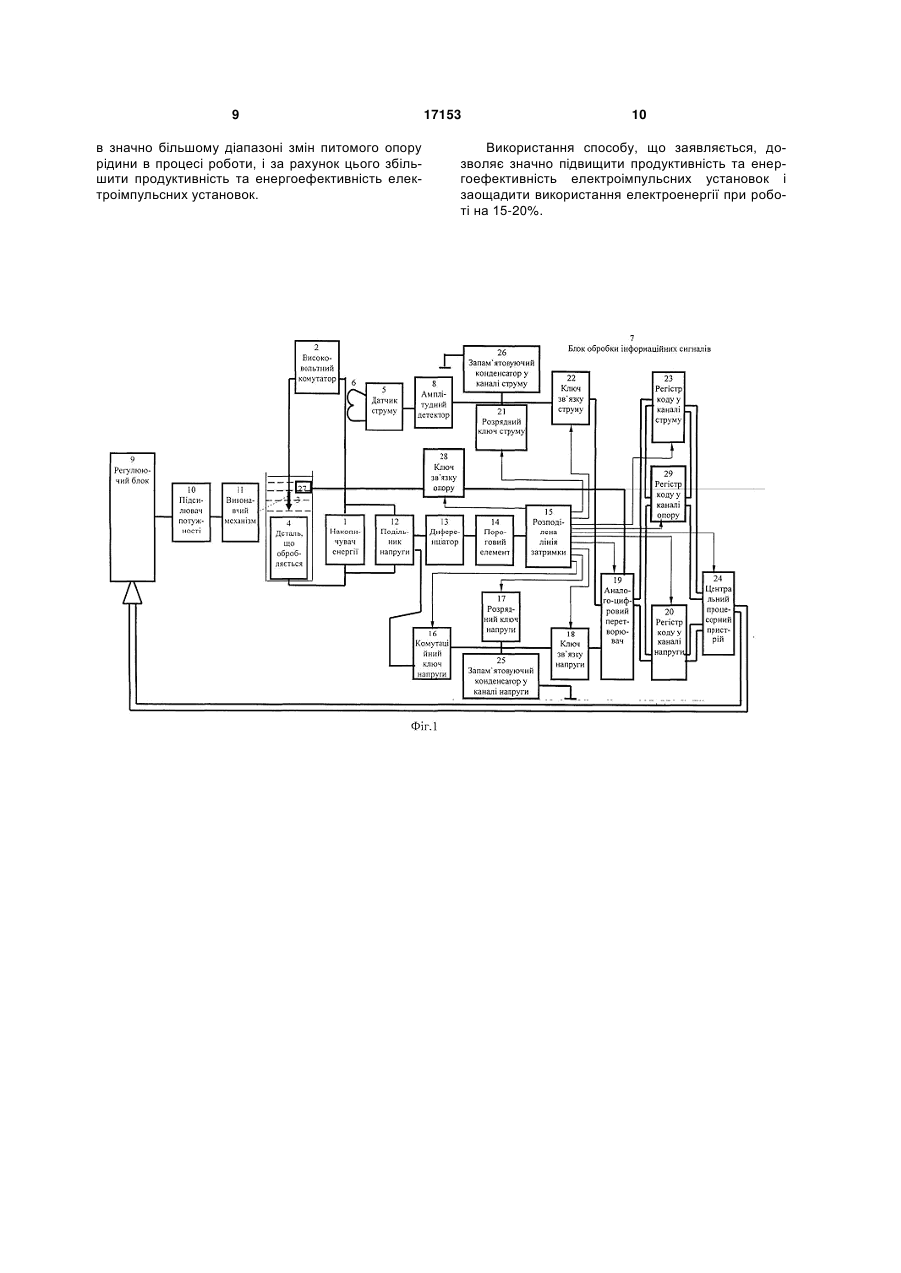
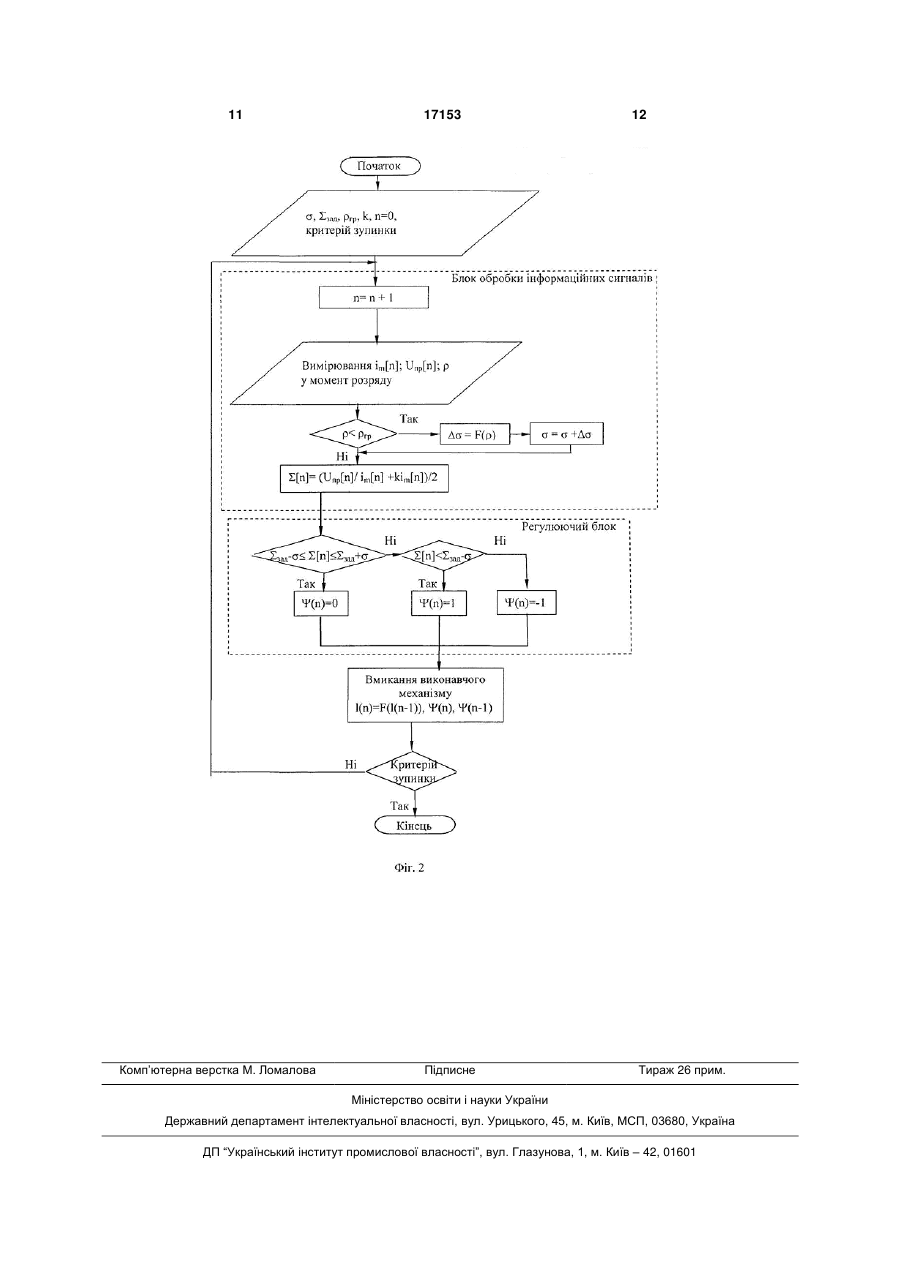
Спосіб автоматичного регулювання електроімпульсних установок, при якому автоматичне регулювання здійснюють за відхиленням вихідної 3 вказаною величиною суттєво зменшується за рахунок збільшення дисперсії даної величини при зменшенні питомого опору рідини і, як наслідок, низька точність і надійність регулювання та, навіть, неможливість регулювання при певному граничному значенні питомого опору рідини. В основу корисної моделі поставлено задачу створити спосіб автоматичного регулювання електроімпульсних установок, в якому введення нової операції з коригування заданого допустимого відхилення вихідної величини забезпечить автоматичну зміну точності регулювання в залежності від питомого опору рідини, що дозволить розширити зону керованості об'єкта, підвищити точність системи регулювання при технологічно допустимих змінах питомого опору рідини, підняти рівень надійності автоматичного регулювання в значно більшому діапазоні змін питомого опору рідини в процесі роботи, і за рахунок цього збільшити продуктивність та енергоефективність електроімпульсних установок і заощадити використання електроенергії на 15-20%. Суть способу, який заявляється, полягає в тому, що автоматичне регулювання здійснюють за відхиленням вихідної величини, яку визначають як суму частки від ділення напруги, виміряної у момент замикання розрядного проміжку, на амплітудне значення розрядного струму та амплітудного значення розрядного струму, взятого з певним ваговим коефіцієнтом, з урахуванням допустимого відхилення, згідно з корисною моделлю, вводять корекцію заданого допустимого відхилення вихідної величини в залежності від питомого опору рідини, в якій відбувається імпульсний електророзряд. Розкриваючи причинно-наслідковий зв'язок між сукупністю ознак способу, що заявляється і технічним результатом, якого можна досягти, необхідно відзначити, що введення корекції заданого допустимого відхилення вихідної величини, в залежності від питомого опору рідини, в якій відбувається імпульсний електророзряд, дозволяє розширити зону керованості об'єкта та підвищити точність оцінки реального стану об'єкта керування, в тому числі реальної довжини міжелектродного проміжку, що є каналом керуючого впливу. При зменшенні питомого опору рідини, за рахунок забруднення формуючою сумішшю в процесі роботи електроімпульсної установки, відбувається збільшення дисперсії вихідної величини, тобто зменшення її інформативності, і при певному значенні питомого опору середньоквадратичне відхилення вихідної координати виходить за межі, заданого в регуляторі допустимого відхилення, при перевищенні якого регулятор видає сигнал на зміну довжини міжелектродного проміжку. В такому випадку сигнал на зміну довжини міжелектродного проміжку буде хибним, оскільки відхилення вихідної величини перевищило задане допустиме значення відхилення не за рахунок зміни довжини міжелектродного проміжку, а за рахунок збільшення дисперсії в результаті зменшення питомого опору рідини. При такому співвідношенні заданого в регуляторі допустимого відхилення вихідної величини та її середньоквадратичного відхилення, 17153 4 обумовленого зміною питомого опору рідини, об'єкт стає некерованим, тому для забезпечення керованості в даному випадку введено корекцію заданого допустимого відхилення регульованої величини в залежності від поточного значення питомого опору. Якщо з метою уникнення вище вказаної ситуації встановлювати завищене значення допустимого відхилення при початковому значенні питомого опору, відбудеться зменшення точності та ефективності регулювання, так як регулюючий блок не буде реагувати на суттєве відхилення вихідної величини, яка є інформаційною координатою, і установка буде працювати в неоптимальному режимі, що приведе до погіршення якості обробки, збільшення терміну обробки та підвищення енергозатрат. При недопустимому зменшенні питомого опору рідини, коли не забезпечуються умови формування розряду, система регулювання після перевірки критерію зупинки, в якому враховано критичне значення питомого опору, видає сигнал на зупинку для часткового або повного оновлення рідини в робочому об'ємі. Таким чином введення корекції заданого допустимого відхилення вихідної величини в залежності від поточного значення питомого опору робочої рідини забезпечує автоматичну зміну точності регулювання в залежності від питомого опору рідини, що дозволяє розширити зону керованості об'єкта, підвищити точність системи регулювання, яку побудовано за цим способом, при технологічно допустимих змінах питомого опору рідини, та підняти рівень надійності автоматичного регулювання в значно більшому діапазоні змін питомого опору рідини в процесі роботи, і за рахунок цього збільшити продуктивність та енергоефективність електроімпульсних установок і заощадити використання електроенергії на 15-20%. На кресленнях наведено: на Фіг.1 - структурна схема системи для реалізації способу, що заявляється; на Фіг.2. - алгоритм програмної реалізації способу автоматичного регулювання електроімпульсних установок. Система автоматичного регулювання електроімпульсних установок для реалізації способу, що заявляється, (Фіг.1) містить послідовно з'єднані накопичувач енергії 1, високовольтний комутатор 2, робочий електрод 3, деталь, що обробляється 4, послідовно з'єднані датчик струму 5, індуктивне зв'язаний з розрядним контуром за допомогою обмотки 6, блок обробки інформаційних сигналів 7, який містить амплітудний детектор 8, регулюючий блок 9, підсилювач потужності 10 і виконавчий механізм 11, кінематичне з'єднаний з робочим електродом 3, послідовно з'єднані подільник напруги 12, вхід якого з'єднано з накопичувачем енергії 1. Блок обробки інформаційних сигналів 7 містить послідовно з'єднані диференціатор 13, пороговий елемент 14 і розподілена лінія затримки 15, а також комутаційний ключ напруги 16, розрядний ключ напруги 17, ключ зв'язку напруги 18, аналого-цифровий перетворювач 19, регістр коду у каналі напруги 20, розрядний ключ струму 21, ключ зв'язку струму 22, регістр коду у каналі струму 23, центральний процесорний пристрій 24, запам'ятовуючий конденсатор у каналі напруги 25, 5 запам'ятовуючий конденсатор у каналі струму 26, при цьому виходи розподіленої лінії затримки 15 з'єднано відповідно з керуючими входами комутаційного ключа напруги 16, розрядного ключа напруги 17, ключа зв'язку напруги 18, аналогоцифрового перетворювача 19, регістра коду у каналі напруги 20, розрядного ключа струму 21, ключа зв'язку струму 22, регістра коду у каналі струму 23, центрального процесорного пристрою 24; другий вихід подільника напруги 12 з'єднано послідовно з інформаційним входом комутаційного ключа напруги 16, запам'ятовуючим конденсатором у каналі напруги 25, який другим виходом з'єднано з розрядним ключем напруги 17, із інформаційним входом ключа зв'язку напруги 18, інформаційним входом аналого-цифрового перетворювача 19, інформаційним входом регістра коду у каналі напруги 20, із інформаційним входом центрального процесорного пристрою 24, вихід амплітудного детектора 8, вхід якого з'єднано з виходом датчика струму 5, послідовно з'єднано із запам'ятовуючим конденсатором у каналі струму 26, який другим виходом з'єднано з розрядним ключем струму 21, із інформаційним входом ключа зв'язку струму 22, інформаційним входом аналого-цифрового перетворювача 19, інформаційним входом регістра коду у каналі струму 23, інформаційним входом центрального процесорного пристрою 24, вихід якого з'єднано із регулюючим блоком 9. Для реалізації в заявленому способі корекції заданого допустимого відхилення вихідної координати в залежності від питомого опору в системі автоматичного регулювання електроімпульсних установок введено датчик питомого опору 27, який своїм виходом з'єднано з інформаційним входом ключа зв'язку опору 28, інформаційним входом аналого-цифрового перетворювача 19, інформаційним входом регістра коду у каналі опору 29, інформаційним входом центрального процесорного пристрою 24, вихід якого з'єднано з регулюючим блоком 9, з виходу якого регулюючий сигнал через підсилювач потужності 10 подається на виконавчий механізм 11. При цьому виходи розподіленої лінії затримки 15 з'єднано відповідно з керуючими входами ключа зв'язку опору 28, регістра коду у каналі опору 29. Як датчик струму може бути застосований трансформатор струму або котушка Роговського. Як накопичувач енергії в електроімпульсних установках застосовуються високовольтні імпульсні конденсатори, зарядка яких до напруги спрацьовування комутатора 2 здійснюється зарядним пристроєм (на кресленні не показано), який підключено до джерела живлення. Подільник напруги має бути високочастотним активно-ємнісним. Як комутатори використовуються некеровані іскрові розрядники. Як датчик питомого опору використовується пристрій, описаний у наступному джерелі: [Овчинникова Л.Е. Устройство контроля электропроводности жидкости - Киев: Наук. думка. В кн.: Эл. устройства и аппаратура электрогидроимпульсных установок. 1981, С.89-93]. Спосіб, який заявлено, в системі автоматичного регулювання електроімпульсних установок реалізують програмне, засобами мікропроцесора, що 17153 6 дозволяє відносно просто забезпечити введення корекції заданого допустимого відхилення вихідної величини в залежності від питомого опору рідини. Для цього сигнал, пропорційний питомому опору рідини, який отримують за допомогою пристрою контролю питомого опору, подається через канал зв'язку на вхід мікропроцесора, де відбувається програмна реалізація алгоритму заявленого способу автоматичного регулювання електроімпульсних установок з корекцією заданого допустимого відхилення регульованої величини відповідно до поточного значення питомого опору робочої рідини (Фіг.2). Як початкові умови для поточної технології задаються оптимальна величина вихідної координати зад, її допустиме відхилення , ваговий коефіцієнт k, критерій зупинки системи, початкове значення лічильника розрядів n і додатково граничне значення питомого опору гр. При включенні установки починається процес заряду ємнісного накопичувача і його розряду у рідині. Значення лічильника розрядів n збільшується на одиницю і стає рівним n=n+1. Під час розряду вимірюють значення напруги у момент замикання розрядного проміжку Uпp[n], амплітудне значення розрядного струму im[n] та додатково вимірюють поточне значення питомого опору рідини . Засобами мікропроцесора поточне значення питомого опору рідини порівнюється з її заданим для даної технології граничним значенням гр і при < гр розраховується значення корекції =F( ) та відкориговане значення заданого допустимого відхилення = + . Потім розраховується поточне значення інформаційної координати [n]=(Uпp[n]/im[n]+kim[n])/2, в якій частка від ділення напруги, виміряної у момент замикання розрядного проміжку, на амплітудне значення розрядного струму (Uпp[n]/im[n]) додається до амплітудного значення розрядного струму з визначеним ваговим коефіцієнтом kim[n]. Розраховане поточне значення інформаційної координати [n]=(Uпp[n]/im[n]+kim[n])/2 порівнюється з величиною ( зад ), яка визначається заданим оптимальним значенням вихідної координати зад з урахуванням відкоригованого допустимого відхилення = + . В залежності від результату порівняння генерується керуючий вплив (n), що включає відповідний режим роботи виконавчого механізму. Потім аналізується критерій зупинки і залежно від результату програма або вимикається або циклічно повторюється. Спосіб в системі автоматичного регулювання електроімпульсних установок реалізують таким чином. Після спрацьовування високовольтного комутатора 2 відбувається розряд накопичувача енергії 1 через електрод 3 на деталь 4. При цьому починає змінюватися напруга на накопичувачі енергії 1 і сигнал, пропорційній цій напрузі через подільник напруги 12 поступає на диференціатор 13. Так як у момент замикання міжелектродного проміжку плазмовим каналом перша похідна напруги має пік, то цей пік реєструється пороговим елементом 14 і з його виходу поступає сигнал на включення розпо 7 діленої лінії затримки 15, з виходів якої подаються сигнали керування послідовно, за часом затримки, на керуючі входи комутаційного ключа напруги 16, ключа зв'язку напруги 18, аналого-цифрового перетворювача 19, регістра коду у каналі напруги 20, розрядного ключа напруги 17, ключа зв'язку струму 22, регістра коду у каналі струму 23, розрядного ключа струму 21, ключа зв'язку 28, регістра коду у каналі 29, центрального процесорного пристрою 24. Послідовно спрацьовуючи вищезгадані елементи пропускають і перетворюють всі інформаційні сигнали. З другого виходу подільника напруги 12, вхід якого з'єднано з накопичувачем енергії 1, на інформаційний вхід комутаційного ключа напруги 16 поступає сигнал пропорційний напрузі на накопичувачі енергії 1, і заряджає запам'ятовуючий конденсатор у каналі напруги 25 до рівня, який відповідає значенню напруги в момент часу спрацьовування комутаційного ключа напруги 16, у момент, коли на його керуючий вхід подається сигнал з розподіленої лінії затримки 15, далі цей сигнал передається через ключ зв'язку напруги 18, у момент часу, коли на його керуючий вхід подається сигнал з розподіленої лінії затримки 15, на інформаційний вхід аналого-цифрового перетворювача 19, який спрацьовує, коли на його керуючий вхід подається сигнал з розподіленої лінії затримки 15, з виходу аналого-цифрового перетворювача 19 оцифрований сигнал подається на інформаційний вхід регістра коду у каналі напруги 20, де він записується у момент часу, коли на керуючий вхід регістра коду у каналі напруги 20 подається сигнал з розподіленої лінії затримки 15. Після спрацьовування високовольтного комутатора 2 в розрядному контурі установки протікає струм, який наводить ЕРС в обмотці 6 датчика струму 5. З виходу датчика струму 5 сигнал, пропорційний струму в розрядному контурі, надходить на входи амплітудного детектора 8, і амплітуда струму запам'ятовується за допомогою запам'ятовуючого конденсатора у каналі струму 26, з виходу якого сигнал поступає на інформаційний вхід ключа зв'язку струму 22 і передається через нього у момент часу, коли на його керуючий вхід подається сигнал з розподіленої лінії затримки 15. Звідти сигнал поступає на інформаційний вхід аналогоцифрового перетворювача 19 і, у момент часу, коли на його керуючий вхід подається сигнал з розподіленої лінії затримки 15, перетворюється у цифровий код. Оцифрований сигнал поступає на інформаційний вхід регістра коду у каналі струму 23, де у момент часу, коли на його керуючий вхід подається сигнал з розподіленої лінії затримки 15, запам'ятовується. З виходу датчика питомого опору 27 сигнал, пропорційний питомому опору поступає на інформаційний вхід ключа зв'язку опору 28 і передається через нього у момент часу, коли на його керуючий вхід подається сигнал з розподіленої лінії затримки 15, на інформаційний вхід аналого-цифрового перетворювача 19 і, у момент часу, коли на його керуючий вхід подається сигнал з розподіленої лінії затримки 15, перетворюється у цифровий код. Оцифрований сигнал, пропорційний питомому опору, поступає на інформаційний вхід регістра коду у каналі опору 29, де у момент 17153 8 часу, коли на його керуючий вхід подається сигнал з розподіленої лінії затримки 15, запам'ятовується. З виходу регістра коду у каналі напруги 20, з виходу регістра коду у каналі струму 23 та з виходу регістра коду у каналі опору 29 відповідні оцифровані сигнали напруги, струму і питомого опору подаються на інформаційні входи центрального процесорного пристрою 24, де у момент часу, коли на його керуючий вхід подається сигнал з розподіленої лінії затримки 15, розраховується поточне значення вихідної величини, тобто інформаційної координати [n]=(Uпp[n]/im[n]+kim[n])/2, як частка від ділення напруги у момент замикання міжелектродного проміжку плазмовим каналом на амплітудне значення розрядного струму, до якої додається амплітудне значення розрядного струму з визначеним вагомим коефіцієнтом k, і подається на вихід центрального процесорного пристрою 24. Розраховується також величина корекції =F( ) та відкориговане допустиме значення відхилення вихідної величини = + , яке подається на вихід центрального процесорного пристрою 24. Потім на керуючий вхід розрядного ключа напруги 17 подається сигнал з розподіленої лінії затримки 15, і запам'ятовуючий конденсатор у каналі напруги 25 розряджається і стає готовий для нового циклу роботи системи керування. Потім на керуючий вхід розрядного ключа струму 21 подається сигнал з розподіленої лінії затримки 15, і запам'ятовуючий конденсатор у каналі струму 26 розряджається і стає готовий для нового циклу роботи системи керування. З виходу центрального процесорного пристрою 24 інформаційні сигнали поступають на вхід регулюючого блока 9, де порівнюється розраховане поточне значення вихідної величини [n] з її заданим значенням для певної технології з урахуванням відкоригованого = + відповідно до поточного значення питомого опору допустимого відхилення ( зад ), і в залежності від результату порівняння в регулюючому блоці 9 генерується керуючий сигнал (n), який через підсилювач потужності 10 надходить для відпрацювання виконавчим механізмом 11. Корекція заданого допустимого відхилення вихідної величини в залежності від поточного значення питомого опору рідини, яка змінюється в процесі роботи електроімпульсних установок внаслідок забруднення формуючою сумішшю та продуктами розряду, дозволяє розширити зону керованості об'єкта, тобто забезпечити керованість при значно більшому діапазоні змін питомого опору рідини; підвищити точність оцінки реального стану об'єкта регулювання, в тому числі точність інформації про реальну довжину міжелектродного проміжку, який є каналом керуючого впливу. Таким чином, введення корекції заданого допустимого відхилення вихідної величини в залежності від поточного значення питомого опору робочої рідини забезпечує автоматичну зміну точності регулювання в залежності від питомого опору рідини, що дозволяє розширити зону керованості об'єкта, підвищити точність системи регулювання, яку побудовано за цим способом, та підняти рівень надійності автоматичного регулювання 9 в значно більшому діапазоні змін питомого опору рідини в процесі роботи, і за рахунок цього збільшити продуктивність та енергоефективність електроімпульсних установок. 17153 10 Використання способу, що заявляється, дозволяє значно підвищити продуктивність та енергоефективність електроімпульсних установок і заощадити використання електроенергії при роботі на 15-20%. 11 Комп’ютерна верстка М. Ломалова 17153 Підписне 12 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for automatically controlling an electric pulse unit
Автори англійськоюKozyrev Serhii Serhiiovych, Nazarova Natalia Stanislavivna
Назва патенту російськоюСпособ автоматического регулирования электроимпульсной установки
Автори російськоюКозырев Сергей Сергеевич, Назарова Наталья Станиславовна
МПК / Мітки
МПК: G05B 13/02
Мітки: регулювання, електроімпульсних, автоматичного, установок, спосіб
Код посилання
<a href="https://ua.patents.su/6-17153-sposib-avtomatichnogo-regulyuvannya-elektroimpulsnikh-ustanovok.html" target="_blank" rel="follow" title="База патентів України">Спосіб автоматичного регулювання електроімпульсних установок</a>
Спосіб автоматичного регулювання електроімпульсних установок
Номер патенту: 74674
Опубліковано: 16.01.2006
Автори: Вовк Іван Трохимович, Назарова Наталя Станіславівна
МПК: G05B 13/02
Мітки: автоматичного, регулювання, установок, електроімпульсних, спосіб
Формула / Реферат:
Спосіб автоматичного регулювання електроімпульсних установок, який полягає в тому, що автоматичне регулювання здійснюють за відхиленням величини, виміряної під час розряду, яку визначають як частку від ділення напруги, виміряної у момент замикання розрядного проміжку, на амплітудне значення розрядного струму, який відрізняється тим, що додатково враховують відхилення амплітудного значення розрядного струму, взяте з урахуванням певного...
Спосіб автоматичного регулювання електроімпульсних установок та система для його здійснення
Номер патенту: 64066
Опубліковано: 16.02.2004
Автори: Вовк Іван Трохимович, Назарова Наталя Станіславівна
МПК: G05B 13/02
Мітки: автоматичного, здійснення, система, спосіб, електроімпульсних, регулювання, установок
Формула / Реферат:
1. Спосіб автоматичного регулювання електроімпульсних установок, який полягає в тому, що автоматичне регулювання здійснюють за принципом відхилення величини, виміряної під час розряду, який відрізняється тим, що величину відхилення визначають як частку від ділення напруги, виміряної у момент замикання розрядного проміжку, на амплітудне значення розрядного струму.2. Система автоматичного регулювання електроімпульсних установок, що...
Система автоматичного регулювання електроімпульсних установок
Номер патенту: 33541
Опубліковано: 15.02.2001
Автори: Назарова Наталя Станіславівна, Вовк Іван Трофимович
МПК: G05B 13/02
Мітки: система, електроімпульсних, автоматичного, установок, регулювання
Текст:
...сигналів 7. Перший вхід блоку 7 з'єднаний послідовно з амплітудним детектором 13, повторювачем 14, першим входом ключа зв'язку 15, першим входом апроксиматора 16 і виходом блоку 7. Другий вхід блоку 7 послідовно з'єднаний з другим входом апроксиматора 16 і виходом блоку 7. Третій вхід блоку 7 послідовно з'єднаний з формувачем сигналу управління 17, першою лінією затримки 18, другою лінією затримки 19 і розрядним ключем 20. До виходу першої...
Спосіб автоматичного регулювання електричного режиму печі електрошлакового переплавлення
Номер патенту: 62300
Опубліковано: 15.12.2003
Автори: Циганаш Віктор Євграфович, Піщуліна Олена Вікторівна
МПК: C22B 9/18
Мітки: режиму, печі, спосіб, електрошлакового, регулювання, переплавлення, електричного, автоматичного
Формула / Реферат:
Спосіб автоматичного регулювання електричного режиму печі електрошлакового переплавлення, при якому вимірюють струм і напругу в силовому ланцюзі печі, перетворюють їх у сигнали, пропорційні обмірюваним параметрам, і подають на модель силового контуру, після чого вимірюють на моделі сигнал, що характеризує потужність, порівнюють його з заданим і при наявності неузгодженості змінюють міжелектродний проміжок до усунення неузгодженості, який...
Спосіб автоматичного регулювання напруги генератора
Номер патенту: 3527
Опубліковано: 15.11.2004
Автори: Прохорчук Олександр Віталійович, ТРОНЬ ЮРІЙ ОПАНАСОВИЧ, Збруцький Олександр Васильович
МПК: H02P 9/14
Мітки: регулювання, автоматичного, напруги, спосіб, генератора
Формула / Реферат:
Спосіб автоматичного регулювання напруги генератора, який полягає в тому, що формують сигнал завдання, пропорційний заданій напрузі генератора, вимірюють напругу на виході генератора, отримане значення порівнюють з сигналом завдання і формують сигнал похибки регулювання, який відрізняється тим, що результат порівняння подають на вхід моделі, сигнал, пропорційний сигналу на виході моделі, алгебраїчно підсумовують із сигналом завдання,...
Попередній патент: Компакт-матеріал для ківшової обробки чавуну
Наступний патент: Мікроелектронний пристрій для виміру тиску
Випадковий патент: Система зонування водопровідних мереж