Спосіб визначення компонентів тензору деформації за дії складного змінного навантажування конструкційних матеріалів
Номер патенту: 86936
Опубліковано: 10.01.2014
Автори: Войналович Олександр Володимирович, Писаренко Георгій Георгійович, Майло Андрій Миколайович
Формула / Реферат
Спосіб визначення компонентів тензору деформації за дії складного змінного навантажування конструкційних матеріалів, за допомогою електромеханічної системи, а саме до поверхні контрольованого об'єкту притискають нерезонансний стрижень-індентор датчика, чутливою частиною якого є п'єзокерамічний диск з діаметральними розрізами електродного покриву кераміки, після чого надають п'єзокерамічному диску неосесиметричних резонансних планарних коливань для створення у локальній зоні контакту індентора датчика з поверхнею матеріалу контрольованого об'єкта тангенційних деформацій, ортогональні компоненти яких відповідають деформаційній взаємодії елементів структури контрольованого об'єкта з трансверсально-ізотропною структурою матеріалу п'єзокерамічного диска датчика через опір лінійному переміщенню індентора за умов локального поверхневого деформування матеріалу контрольованого об'єкта, вимірюють значення зсуву фаз між ортогональними компонентами тангенційних деформацій, яке приймають за характеристику ступеня пошкодження локальної зони поверхні контрольованого об'єкта внаслідок дії складного змінного навантажування, який відрізняється тим, що додатково на верхньому кінці нерезонансного стрижня встановлюють співвісно з віссю симетрії п'єзокерамічного диска резонансний датчик, призначений для сприйняття нормальної компоненти тензору деформацій поверхні контрольованого об'єкта, інший кінець стрижня жорстко з'єднують з поверхнею контрольованого об'єкта, та вимірюють електричні сигнали, отримані по трьох каналах вимірювання зазначеної електромеханічної системи, що пропорційні амплітудам деформації та функціонально пов'язані між собою через п'єзосталі деформацій матеріалу датчика відповідно напрямкам компонент тензору деформацій у локальній зоні контрольованого об'єкта.
Текст
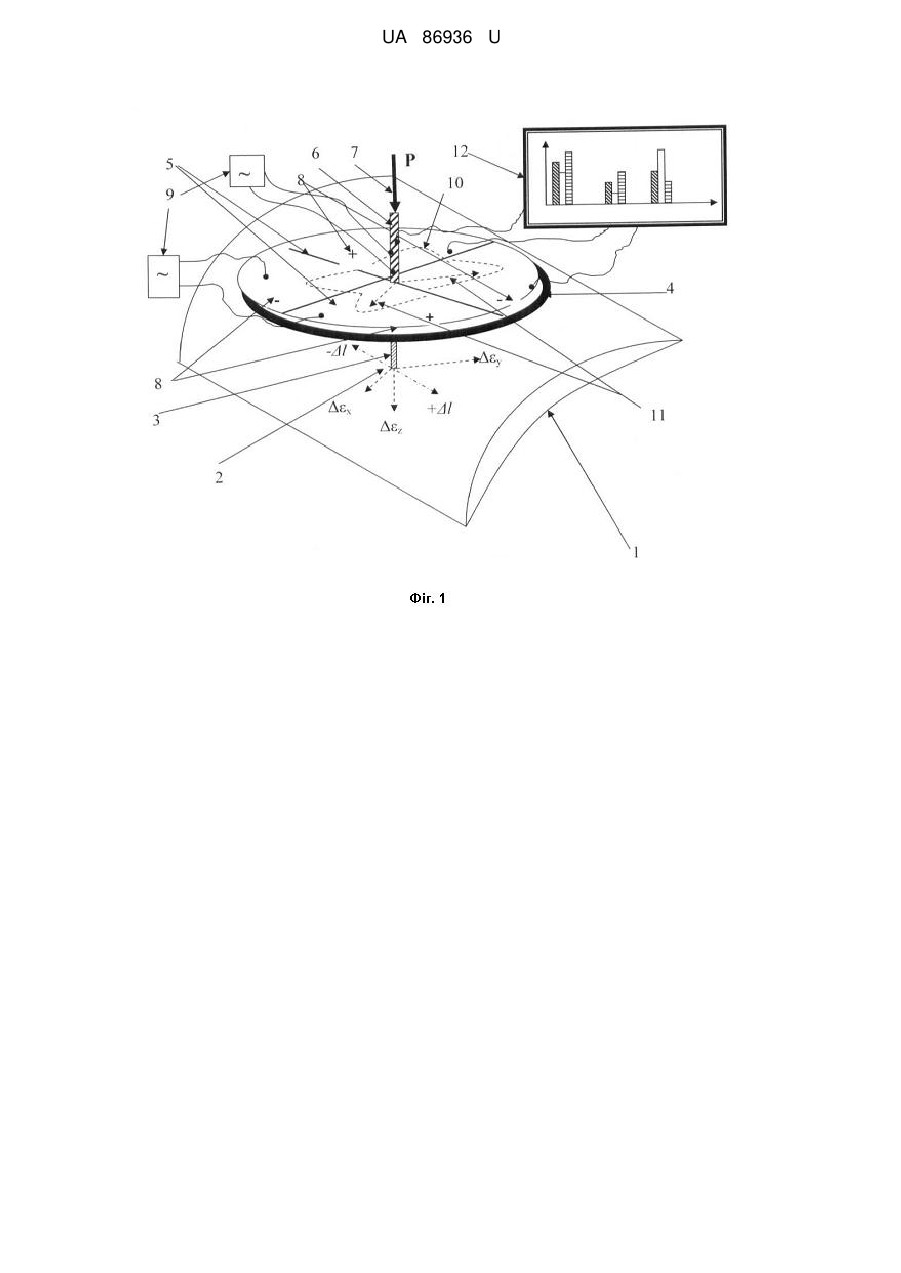
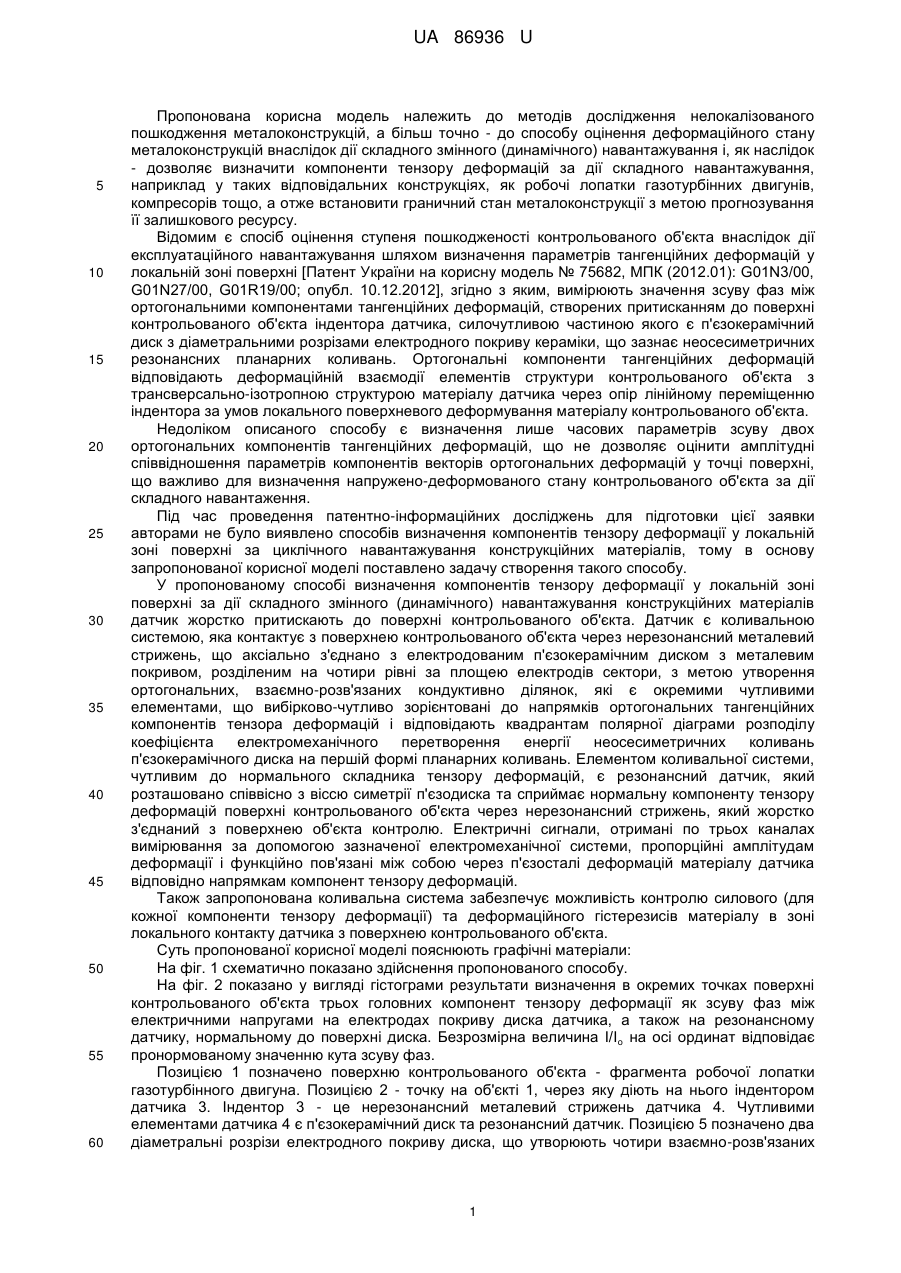
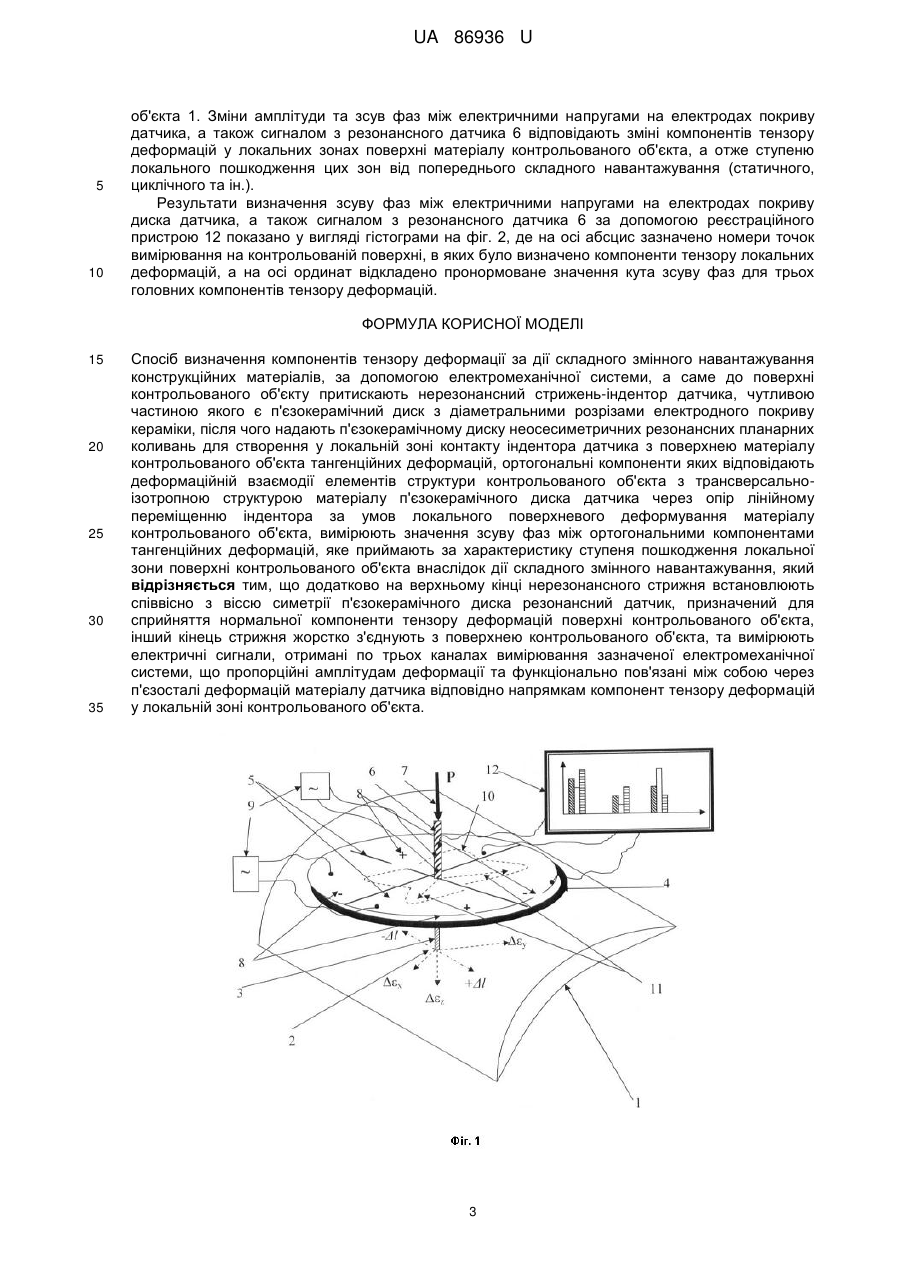
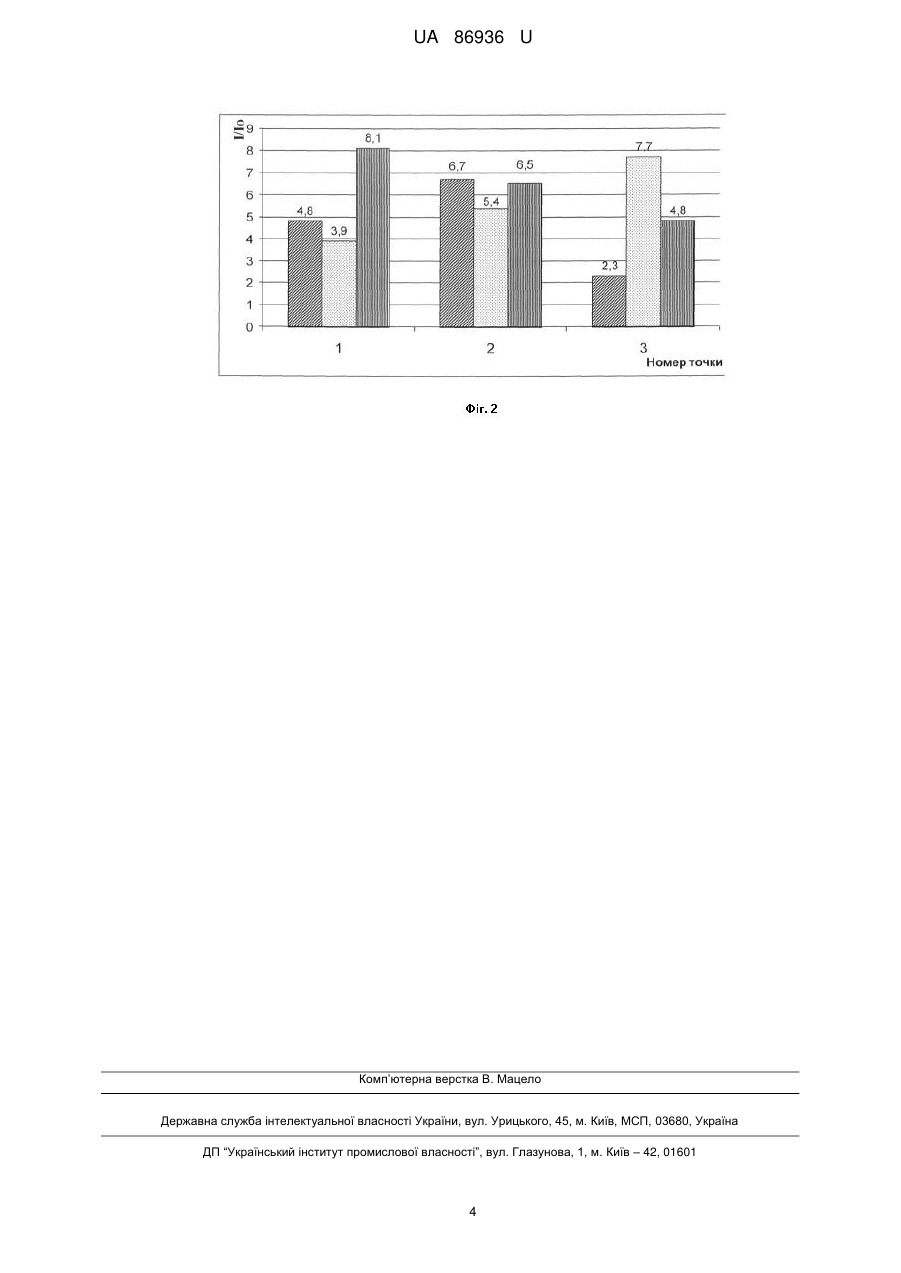
Реферат: Спосіб визначення компонентів тензору деформації за дії складного змінного навантажування конструкційних матеріалів, за допомогою електромеханічної системи, а саме до поверхні контрольованого об'єкта притискають нерезонансний стрижень-індентор датчика, чутливою частиною якого є п'єзокерамічний диск з діаметральними розрізами електродного покриву кераміки, після чого надають п'єзокерамічному диску неосесиметричних резонансних планарних коливань для створення у локальній зоні контакту індентора датчика з поверхнею матеріалу контрольованого об'єкта тангенційних деформацій. Додатково на верхньому кінці нерезонансного стрижня встановлюють співвісно з віссю симетрії п'єзокерамічного диска резонансний датчик, призначений для сприйняття нормальної компоненти тензору деформацій поверхні контрольованого об'єкта, інший кінець стрижня жорстко з'єднують з поверхнею контрольованого об'єкта, та вимірюють електричні сигнали, отримані по трьох каналах вимірювання зазначеної електромеханічної системи, що пропорційні амплітудам деформації та функціонально пов'язані між собою через п'єзосталі деформацій матеріалу датчика відповідно напрямкам компонент тензору деформацій у локальній зоні контрольованого об'єкта. UA 86936 U (12) UA 86936 U UA 86936 U 5 10 15 20 25 30 35 40 45 50 55 60 Пропонована корисна модель належить до методів дослідження нелокалізованого пошкодження металоконструкцій, а більш точно - до способу оцінення деформаційного стану металоконструкцій внаслідок дії складного змінного (динамічного) навантажування і, як наслідок - дозволяє визначити компоненти тензору деформацій за дії складного навантажування, наприклад у таких відповідальних конструкціях, як робочі лопатки газотурбінних двигунів, компресорів тощо, а отже встановити граничний стан металоконструкції з метою прогнозування її залишкового ресурсу. Відомим є спосіб оцінення ступеня пошкодженості контрольованого об'єкта внаслідок дії експлуатаційного навантажування шляхом визначення параметрів тангенційних деформацій у локальній зоні поверхні [Патент України на корисну модель № 75682, МПК (2012.01): G01N3/00, G01N27/00, G01R19/00; опубл. 10.12.2012], згідно з яким, вимірюють значення зсуву фаз між ортогональними компонентами тангенційних деформацій, створених притисканням до поверхні контрольованого об'єкта індентора датчика, силочутливою частиною якого є п'єзокерамічний диск з діаметральними розрізами електродного покриву кераміки, що зазнає неосесиметричних резонансних планарних коливань. Ортогональні компоненти тангенційних деформацій відповідають деформаційній взаємодії елементів структури контрольованого об'єкта з трансверсально-ізотропною структурою матеріалу датчика через опір лінійному переміщенню індентора за умов локального поверхневого деформування матеріалу контрольованого об'єкта. Недоліком описаного способу є визначення лише часових параметрів зсуву двох ортогональних компонентів тангенційних деформацій, що не дозволяє оцінити амплітудні співвідношення параметрів компонентів векторів ортогональних деформацій у точці поверхні, що важливо для визначення напружено-деформованого стану контрольованого об'єкта за дії складного навантаження. Під час проведення патентно-інформаційних досліджень для підготовки цієї заявки авторами не було виявлено способів визначення компонентів тензору деформації у локальній зоні поверхні за циклічного навантажування конструкційних матеріалів, тому в основу запропонованої корисної моделі поставлено задачу створення такого способу. У пропонованому способі визначення компонентів тензору деформації у локальній зоні поверхні за дії складного змінного (динамічного) навантажування конструкційних матеріалів датчик жорстко притискають до поверхні контрольованого об'єкта. Датчик є коливальною системою, яка контактує з поверхнею контрольованого об'єкта через нерезонансний металевий стрижень, що аксіально з'єднано з електродованим п'єзокерамічним диском з металевим покривом, розділеним на чотири рівні за площею електродів сектори, з метою утворення ортогональних, взаємно-розв'язаних кондуктивно ділянок, які є окремими чутливими елементами, що вибірково-чутливо зорієнтовані до напрямків ортогональних тангенційних компонентів тензора деформацій і відповідають квадрантам полярної діаграми розподілу коефіцієнта електромеханічного перетворення енергії неосесиметричних коливань п'єзокерамічного диска на першій формі планарних коливань. Елементом коливальної системи, чутливим до нормального складника тензору деформацій, є резонансний датчик, який розташовано співвісно з віссю симетрії п'єзодиска та сприймає нормальну компоненту тензору деформацій поверхні контрольованого об'єкта через нерезонансний стрижень, який жорстко з'єднаний з поверхнею об'єкта контролю. Електричні сигнали, отримані по трьох каналах вимірювання за допомогою зазначеної електромеханічної системи, пропорційні амплітудам деформації і функційно пов'язані між собою через п'єзосталі деформацій матеріалу датчика відповідно напрямкам компонент тензору деформацій. Також запропонована коливальна система забезпечує можливість контролю силового (для кожної компоненти тензору деформації) та деформаційного гістерезисів матеріалу в зоні локального контакту датчика з поверхнею контрольованого об'єкта. Суть пропонованої корисної моделі пояснюють графічні матеріали: На фіг. 1 схематично показано здійснення пропонованого способу. На фіг. 2 показано у вигляді гістограми результати визначення в окремих точках поверхні контрольованого об'єкта трьох головних компонент тензору деформації як зсуву фаз між електричними напругами на електродах покриву диска датчика, а також на резонансному датчику, нормальному до поверхні диска. Безрозмірна величина І/І о на осі ординат відповідає пронормованому значенню кута зсуву фаз. Позицією 1 позначено поверхню контрольованого об'єкта - фрагмента робочої лопатки газотурбінного двигуна. Позицією 2 - точку на об'єкті 1, через яку діють на нього індентором датчика 3. Індентор 3 - це нерезонансний металевий стрижень датчика 4. Чутливими елементами датчика 4 є п'єзокерамічний диск та резонансний датчик. Позицією 5 позначено два діаметральні розрізи електродного покриву диска, що утворюють чотири взаємно-розв'язаних 1 UA 86936 U 5 10 15 20 25 30 35 40 45 50 55 60 кондуктивно сектори, які відповідають чотирьом квадрантам полярної діаграми розподілу коефіцієнта електромеханічного перетворення за умов циклічного деформування чутливого елемента диска на першій формі планарних резонансних коливань. Позицією 6 позначено резонансний датчик, який розташовано співвісно з нормальною віссю симетрії п'єзодиску. Позицією 7 - нормоване зусилля Р притискання індентора 3 датчика 4 до поверхні контрольованого об'єкта 1 у точці 2. Позицією 8 - силозбуджувальні зони п'єзокерамічного диска датчика (електроди). Позицією 9 - електричне джерело збудження датчика 4. Позицією 10 позначено полярну діаграму значень вектора механічної деформації, яку умовно суміщено з поверхнею диска датчика 4. Позицією 11 - вектори максимального значення механічної деформації секторів диска датчика 4, які відповідають напрямам максимумів коефіцієнтів трансформації для вибраної форми резонансних коливань диска датчика 4. Позицією 12 реєстраційний пристрій сигналів з п'єзокерамічного диска та резонансного датчика 6. На поверхні контрольованого об'єкта 1 - фрагменті робочої лопатки газотурбінного двигуна, де внаслідок термосилового навантажування сформувалися пошкодження мікроструктури, визначено точку 2, призначену для дії через неї на об'єкт 1 індентором 3 (нерезонансним металевим стрижнем) датчика 4, чутливими елементами якого є п'єзокерамічний диск, на якому виконано два діаметральні розрізи 5 електродного покриву диска, що утворюють чотири взаємно-розв'язаних кондуктивно сектори, які відповідають чотирьом квадрантам полярної діаграми розподілу коефіцієнта електромеханічного перетворення за умов циклічного деформування чутливого елемента диска на першій формі планарних резонансних коливань, та резонансний датчик 6, який розташовано співвісно з нормальною віссю симетрії п'єзодиска та сприймає нормальну компоненту тензору деформацій поверхні контрольованого об'єкта через нерезонансний індентор 3, який жорстко з'єднаний з поверхнею об'єкта контролю. Індентор 3 датчика 4 притискають до поверхні контрольованого об'єкта 1 у точці 2 нормованим зусиллям Р (позиція 7 на фіг. 1). Силозбуджувальні зони п'єзокерамічного диска датчика (електроди 8), які відокремлено розрізами 5 диска 4, формують знакозмінне переміщення індентора 3 уздовж напрямку поверхні контрольованого об'єкта, зумовлене дією п'єзоелектричного ефекту, що виникає у разі подавання на електродний покрив датчика 4 змінного сигналу від електричного джерела збудження 9, яким може бути генератор звуковий, наприклад Г3-109. Схему розподілу коефіцієнтів трансформації п'єзокерамічного диска датчика 4 представлено у вигляді полярної діаграми значень вектора механічної деформації 10, яку умовно суміщено на фіг. 1 з поверхнею диска датчика 4. Вектори 11 максимального значення механічної деформації секторів диска датчика 4, які відповідають напрямам максимумів коефіцієнтів трансформації для вибраної форми резонансних коливань диска датчика, є ортогональними і характеризуються вибірковістю щодо корисного сигналу внаслідок вибору електричного потенціалу або заряду того квадранта еквіпотенціальних поверхонь керамічного резонатору датчика, що співпадає з напрямом вимірюваних компонентів тензору механічних деформацій поверхні об'єкта контролю. Нормальний компонент тензору деформацій сприймає резонансний датчик 6. Як реєстраційний пристрій 12 сигналів з п'єзокерамічного диска та резонансного датчика 6 можна використати вимірювальну систему, описану в деклараційному патенті України на корисну модель № 17348. Реєстраційний пристрій 12 під'єднують до електродів, які є електрично-розв'язані щодо силозбуджувальної електродної частини датчика 4, та до резонансного датчика 6. Приклад. Датчик 4 налаштовували на одну з неосесиметричних форм резонансних коливань диска датчика. Внаслідок неосесиметричності коливань диска датчика 4, які можна представити ортогональними векторами х та у (позиція 11 на фіг. 1), у точці 2 від індентора 3 у напрямках l та +l на поверхні контрольованого об'єкта 1 та нормально до поверхні ініціюються циклічні деформації, що взаємодіють із структурними елементами матеріалу контрольованого об'єкта 1, розташованих у напрямах векторів деформацій х, у та z, що виникають як прояв компонентів тензору локальних деформацій. Амплітудно-часові співвідношення складників тензору локальних деформацій х, у та z, локальної зони поверхні, як взаємний зсув фаз, реєстрував пристрій 12. Індентор датчика 4 кінематично пересували по поверхні матеріалу, а реєстраційний пристрій 12 у заданих точках поверхні реєстрував зміну потенціалу електродів покриву датчика, що відповідає реакції певно-зорієнтованих елементів структури твердого тіла - контрольованого об'єкта 1 під дією лінійного навантаження за поверхневого деформування, та змінний сигнал з резонансного датчика 6, а отже забезпечував отримання даних щодо амплітудно-часових співвідношень компонентів тензору деформацій у локальних зонах матеріалу контрольованого 2 UA 86936 U 5 10 об'єкта 1. Зміни амплітуди та зсув фаз між електричними напругами на електродах покриву датчика, а також сигналом з резонансного датчика 6 відповідають зміні компонентів тензору деформацій у локальних зонах поверхні матеріалу контрольованого об'єкта, а отже ступеню локального пошкодження цих зон від попереднього складного навантажування (статичного, циклічного та ін.). Результати визначення зсуву фаз між електричними напругами на електродах покриву диска датчика, а також сигналом з резонансного датчика 6 за допомогою реєстраційного пристрою 12 показано у вигляді гістограми на фіг. 2, де на осі абсцис зазначено номери точок вимірювання на контрольованій поверхні, в яких було визначено компоненти тензору локальних деформацій, а на осі ординат відкладено пронормоване значення кута зсуву фаз для трьох головних компонентів тензору деформацій. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 25 30 35 Спосіб визначення компонентів тензору деформації за дії складного змінного навантажування конструкційних матеріалів, за допомогою електромеханічної системи, а саме до поверхні контрольованого об'єкту притискають нерезонансний стрижень-індентор датчика, чутливою частиною якого є п'єзокерамічний диск з діаметральними розрізами електродного покриву кераміки, після чого надають п'єзокерамічному диску неосесиметричних резонансних планарних коливань для створення у локальній зоні контакту індентора датчика з поверхнею матеріалу контрольованого об'єкта тангенційних деформацій, ортогональні компоненти яких відповідають деформаційній взаємодії елементів структури контрольованого об'єкта з трансверсальноізотропною структурою матеріалу п'єзокерамічного диска датчика через опір лінійному переміщенню індентора за умов локального поверхневого деформування матеріалу контрольованого об'єкта, вимірюють значення зсуву фаз між ортогональними компонентами тангенційних деформацій, яке приймають за характеристику ступеня пошкодження локальної зони поверхні контрольованого об'єкта внаслідок дії складного змінного навантажування, який відрізняється тим, що додатково на верхньому кінці нерезонансного стрижня встановлюють співвісно з віссю симетрії п'єзокерамічного диска резонансний датчик, призначений для сприйняття нормальної компоненти тензору деформацій поверхні контрольованого об'єкта, інший кінець стрижня жорстко з'єднують з поверхнею контрольованого об'єкта, та вимірюють електричні сигнали, отримані по трьох каналах вимірювання зазначеної електромеханічної системи, що пропорційні амплітудам деформації та функціонально пов'язані між собою через п'єзосталі деформацій матеріалу датчика відповідно напрямкам компонент тензору деформацій у локальній зоні контрольованого об'єкта. 3 UA 86936 U Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюPysarenko Heorhii Heorhiiovych, Voinalovych Oleksandr Volodymyrovych, Mailo Andrii Mykolaiovych
Автори російськоюПисаренко Георгий Георгиевич, Войналович Александр Владимирович, Майло Андрей Николаевич
МПК / Мітки
МПК: G01N 27/00, G01R 19/00, G01N 3/00
Мітки: тензору, спосіб, деформації, навантажування, компонентів, матеріалів, змінного, складного, дії, конструкційних, визначення
Код посилання
<a href="https://ua.patents.su/6-86936-sposib-viznachennya-komponentiv-tenzoru-deformaci-za-di-skladnogo-zminnogo-navantazhuvannya-konstrukcijjnikh-materialiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення компонентів тензору деформації за дії складного змінного навантажування конструкційних матеріалів</a>
Спосіб оцінення ступеню пошкодженості контрольованого об’єкта внаслідок дії експлуатаційного навантажування шляхом визначення параметрів тангенційних деформацій у локальній зоні поверхні
Номер патенту: 75682
Опубліковано: 10.12.2012
Автори: Войналович Олександр Володимирович, Писаренко Георгій Георгійович, Майло Андрій Миколайович
МПК: G01R 19/00, G01N 3/00, G01N 27/00
Мітки: параметрів, визначення, спосіб, пошкодженості, об'єкта, ступеню, локальній, оцінення, деформацій, шляхом, контрольованого, експлуатаційного, тангенційних, внаслідок, навантажування, поверхні, дії, зони
Формула / Реферат:
Спосіб оцінення ступеня пошкодженості контрольованого об'єкта внаслідок дії експлуатаційного навантажування шляхом визначення параметрів тангенційних деформацій у локальній зоні поверхні, під час якого до поверхні контрольованого об'єкта притискають індентор датчика, силочутливою частиною якого є п'єзокерамічний диск з діаметральними розрізами електродного покриву кераміки, надають п'єзокерамічному диску неосесиметричних резонансних...
Енергетичний d-метод оцінювання пошкодженості металу за дії змінного силового навантажування згідно з розподілом фази ортогональних деформацій поверхневого шару металоконструкції
Номер патенту: 83732
Опубліковано: 25.09.2013
Автори: Писаренко Георгій Георгійович, Майло Андрій Миколайович, Войналович Олександр Володимирович
МПК: G01N 3/00, G01N 27/00, G01R 19/00
Мітки: дії, згідно, ортогональних, пошкодженості, змінного, металоконструкції, розподілом, поверхневого, силового, енергетичний, d-метод, оцінювання, металу, навантажування, шару, деформацій, фазі
Формула / Реферат:
Енергетичний Δ-метод оцінювання пошкодженості металу за дії змінного силового навантажування згідно з розподілом фази ортогональних деформацій поверхневого шару металоконструкції, під час якого до поверхні контрольованого об'єкта притискають індентор датчика, який відрізняється тим, що у поверхневих шарах матеріалу контрольованого об'єкта ініціюють зондувальну пружну хвилю деформування, реєструють сигнали з датчика, що відповідають...
Спосіб визначення показників рівномірної деформації конструкційних металевих сплавів
Номер патенту: 97226
Опубліковано: 10.01.2012
Автори: Мєшков Юрій Якович, Стеценко Наталія Миколаївна, Марковський Павло Євгенович, Сорока Катерина Феодосіївна, Івасишин Орест Михайлович, Котречко Сергій Олексійович, Шиян Артур Віталійович, Матвійчук Юрій Васильович
МПК: G01N 3/08, G01N 3/00, G01N 3/18
Мітки: показників, металевих, сплавів, рівномірно, визначення, конструкційних, деформації, спосіб
Формула / Реферат:
Спосіб визначення показників рівномірної деформації конструкційних металевих сплавів, при якому проводять випробування стандартних гладких циліндричних зразків на одновісний розтяг при температурах від 4 K до 293 K, визначення при цьому основних механічних характеристик, побудову експериментальної залежності , який відрізняється тим, що для титанових сплавів додатково...
Спосіб неруйнівного визначення оброблюваності конструкційних матеріалів та оброблювальних властивостей інструментальних матеріалів
Номер патенту: 62914
Опубліковано: 26.09.2011
Автори: Барандич Катерина Сергіївна, Вислоух Сергій Петрович, Волошко Оксана В'ячеславівна
МПК: B23Q 15/00
Мітки: матеріалів, конструкційних, визначення, оброблюваності, неруйнівного, інструментальних, спосіб, оброблювальних, властивостей
Формула / Реферат:
Спосіб неруйнівного визначення механічних характеристик сталей, який полягає у тому, що, за значеннями добутку питомого електричного опору та коефіцієнта теплопровідності, визначають належність контрольованої сталі до тої чи іншої структурної групи сталей, а потім за допомогою алгоритмів штучних нейронних мереж отримують розрахункові значення механічних характеристик сталей, який відрізняється тим, що визначають відносну та реальну...
Вихрострумовий спосіб визначення ступеня експлуатаційної деградації конструкційних матеріалів
Номер патенту: 101424
Опубліковано: 25.03.2013
Автори: Учанін Валентин Миколайович, Осташ Орест Петрович, Андрейко Ігор Михайлович, Головатюк Юрій Володимирович
МПК: G01N 27/90
Мітки: конструкційних, визначення, спосіб, вихрострумовий, матеріалів, деградації, ступеня, експлуатаційної
Формула / Реферат:
1. Вихрострумовий спосіб визначення ступеня експлуатаційної деградації конструкційних матеріалів, за яким за допомогою обмотки індуктивності збуджують в контрольованому матеріалі вихрові струми, вимірюють параметри результуючого електромагнітного поля, за якими визначають питому електропровідність s матеріалу, яку використовують при визначенні його структурно-механічного стану, який відрізняється тим, що попередньо виготовляють випробувальні...
Попередній патент: Распатор для підслизової конхотомії нижніх носових раковин
Наступний патент: Кант оздоблювальний плетений
Випадковий патент: Спосіб дренування в лікуванні хронічного панкреатиту