Пристрій захисту і контролю руху копальневої підйомної установки
Номер патенту: 32732
Опубліковано: 26.05.2008
Автори: Мельник Юрій Станіславович, Соломатін Леонід Олександрович, Єфремов Дмитро Владиславович, Роменський Володимир Костянтинович, Кононенко Олексій Михайлович, Попов Микола Миколайович
Формула / Реферат
1. Пристрій захисту і контролю руху копальневої підйомної установки, що містить мікропроцесорний блок із засобом візуального виведення інформації і сполучені з ним лініями зв’язку датчик контролю положення підйомної посудини в стовбурі, що встановлений на приводному валу підйомного барабана, кінематично зв’язаного з валом електродвигуна, і датчик контролю положення підйомної посудини в стовбурі, що встановлений на валу відхиляючого або копрового шківа, який відрізняється тим, що мікропроцесорний блок оснащено додатковим контролером, а датчики контролю положення - додатковими каналами збору даних із своїми лініями зв’язку, якими вони сполучені з входами додаткового контролера.
2. Пристрій захисту і контролю руху копальневої підйомної установки за п. 1, який відрізняється тим, що пристрій додатково оснащений двоканальним датчиком контролю за швидкістю руху підйомної посудини, що встановлений на валу електродвигуна і зв’язаний лініями зв’язку з контролерами мікропроцесорного блока.
Текст
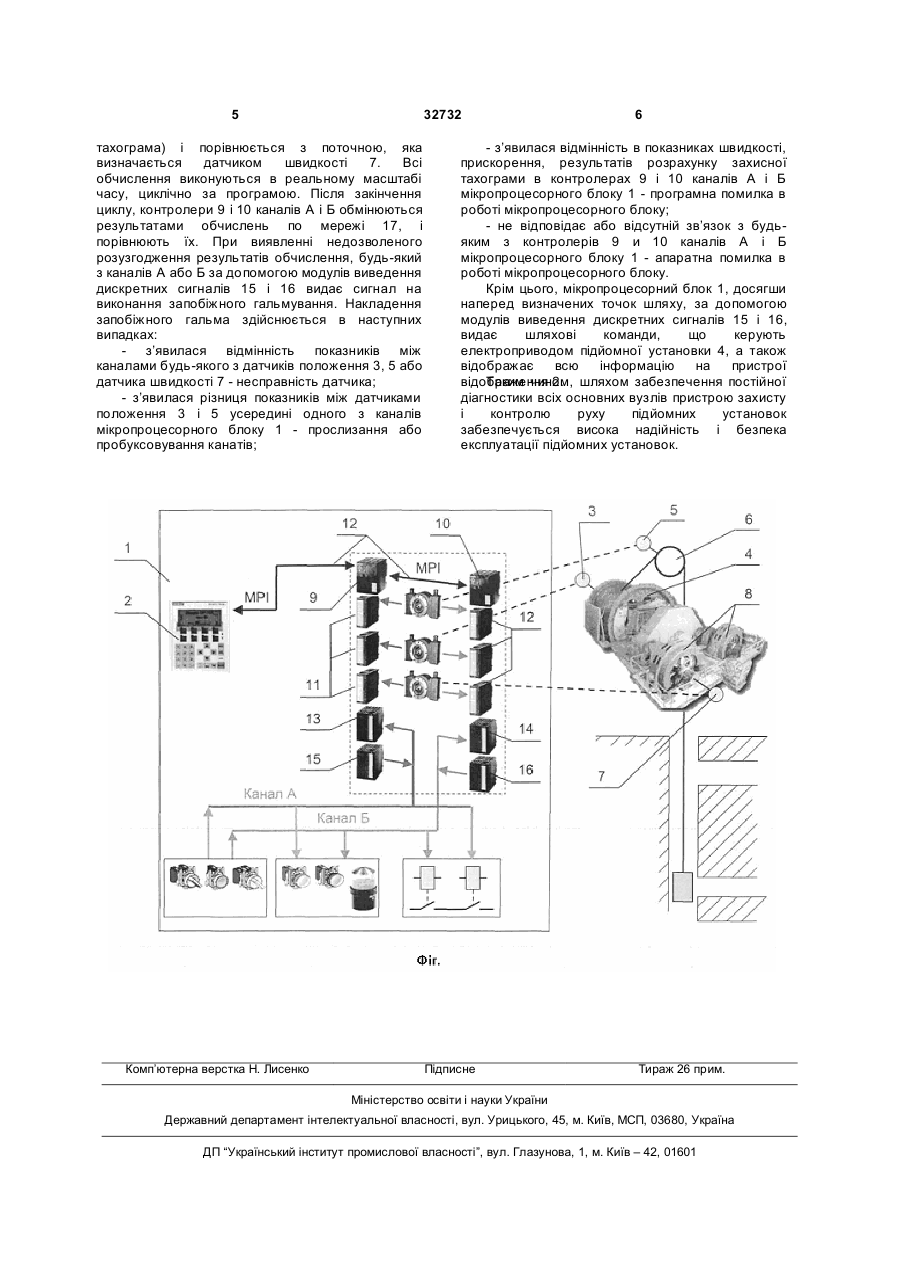
1. Пристрій захисту і контролю руху копальневої підйомної установки, що містить мікропроцесорний блок із засобом візуального виведення інформації і сполучені з ним лініями зв’язку датчик контролю положення підйомної 3 (Огляд)», ТОВ «УКРЭЛЕКТРОСЕРВИС», А.Г.Кущ, В.А.Лазарев, Д.С.Курдюмов. - Харків, 2007. стор.40-42]. Відомий пристрої захисту і контролю руху копальневої підйомної установки і пристрій, що заявляється, мають схожі ознаки: мікропроцесорний блок з пристроєм візуального відображення інформації, зв’язаний лініями зв’язку з датчиками контролю за положенням вантажної судини, один з яких встановлений на валу головного барабана підйомної установки, а інший на валу відхиляючого або копрового шківа. По сукупності істотних ознак зазначений пристрій є найбільш близьким аналогом корисної моделі, що заявляється, і може бути прийнятий за прототип. Але істотним недоліком цього пристрою захисту і контролю руху шахтної підйомної установки, є відсутність в ньому системи контролю за правильністю роботи датчиків, ліній зв’язку і самого мікропроцесорного блоку, що при сучасних вимогах до продуктивності (високі швидкості переміщення вантажних судин і великі маси вантажу, що піднімаються) може призвести до аварій із значним матеріальним втратам та ризиком для життя людей. В основу корисної моделі покладено завдання - створити пристрій захисту і контролю руху копальневої підйомної установки, в якому за рахунок оснащення цього пристрою додатковими засобами збору і обробки інформації, і за рахунок технічного результату, що полягає в створенні системи контролю за правильністю роботи пристрою при оперативній обробці даних, що надходять по незалежних лініях зв’язку, та при збереженні високих експлуатаційних властивостей приводу, забезпечується висока надійність і безпечна експлуатація підйомної установки і копальні в цілому. Вказаний технічний результат забезпечується тим, що пристрій захисту і контролю руху копальневої підйомної установки, що містить мікропроцесорний блок із засобом візуального виведення інформації, і сполучені з ним лініями зв’язку, датчик контролю положення підйомної судини в стовбурі, що встановлений на привідному валу підйомного барабана, кінематично зв’язаного з валом електродвигуна, і датчик контролю положення підйомної судини в стовбурі, що встановлений на валу відхиляючого або копрового шківа, мікропроцесорний блок оснащено додатковим контролером, а датчики контролю положення підйомної судини в стовбурі додатковими каналами збору даних із своїми лініями зв’язку, по яких вони сполучені з входами додаткового контролера. результат досягається Додатковий корисний за рахунок оснащення пристрою двоканальним датчиком контролю швидкості руху підйомної судини, що встановлений на валу електродвигуна і зв’язаний лініями зв’язку з контролерами мікропроцесорного блоку. Між відмінними ознаками корисної моделі і технічним результатом, що досягається, є причинно-наслідковий зв’язок. Тільки завдяки тому, що з пристрої захисту і контролю шахтної підйомної установки, що містить 32732 4 мікропроцесорний блок із засобом візуального виведення інформації, і сполучені з ним за допомогою ліній зв’язку, датчик контролю положення підйомної судини в стовбурі що встановлений на привідному валу підйомного барабана, кінематично зв’язаного з валом електродвигуна, і датчик контролю положення підйомної судини в стовбурі, що встановлений на валу відхиляючого або копрового шківа, мікропроцесорний блок оснащено додатковим контролером, а датчики контролю положення додатковими каналами збору даних із своїми лініями зв’язку, за допомогою яких вони сполучені з входами додаткового контролера, при цьому пристрій захисту і контролю додатково оснащений двоканальним датчиком контролю швидкості руху підйомної судини, що встановлений на валу електродвигуна і зв’язаним лініями зв’язку з контролерами мікропроцесорного блоку, забезпечується висока надійність і безпечна експлуатація шахтної підйомної установки і шахти в цілому, при збереженні її високих експлуатаційних властивостей. Виключення із зазначеної сукупності відмінних ознак будь-якої з них, не забезпечує зазначеного технічного результату. Заявлена корисна модель є промислово застосовна і призначена для використання в системах керування підйомними установками. На ЗАТ «НКМЗ» розроблено досліднопромисловий зразок заявленого пристрою. На Фіг. представлена структурна схема пристрою захисту і контролю руху копальневої підйомної установки. Пристрій захисту і контролю руху містить мікропроцесорний блок 1 із засобом візуального виведення інформації - дисплеєм 2, датчик контролю положення підйомної судини в стовбурі 3, що встановлений на валу барабана підйомної установки 4, і датчик контролю положення підйомної судини в стовбурі 5, що встановлений на валу відхиляючого або копрового шківа 6, а також датчик швидкості 7, що встановлений на валу двигуна 8. Імпульсні виходи датчиків 3, 5, і 7 підключені до каналів А і Б мікропроцесорного блоку 1. Канали А і Б містять контролери 9 і 10, швидкісні лічильники 11 і 12, модулі введення дискретних сигналів 13 і 14, а також модулі виведення дискретних сигналів 15 і 16. Зв’язок між контролерами 9 і 10 каналів А і Б, а також зв’язок контролера 7 каналу А з пристроєм відображення 2 реалізована по мережі 17. Пристрій захисту і контролю руху працює таким чином. Перед початком роботи мікропроцесорний блок 1 за допомогою модулів введення дискретних сигналів 13 і 14 отримує інформацію про початкову точку руху підйомної судини, про напрям її руху і режим керування Залежно від цих параметрів, настроюється робота пристрою. На початку руху підйомної установки 4 імпульси від датчиків положення 3 і 5 накопичуються лічильниками 11 і 12, і обробляються контролерами 9 і 10 каналів А і Б незалежно один від одного. Для кожного положення обчислюється максимально допустима швидкість на кожній ділянці руху (захисна 5 32732 тахограма) і порівнюється з поточною, яка визначається датчиком швидкості 7. Всі обчислення виконуються в реальному масштабі часу, циклічно за програмою. Після закінчення циклу, контролери 9 і 10 каналів А і Б обмінюються результатами обчислень по мережі 17, і порівнюють їх. При виявленні недозволеного розузгодження результатів обчислення, будь-який з каналів А або Б за допомогою модулів виведення дискретних сигналів 15 і 16 видає сигнал на виконання запобіжного гальмування. Накладення запобіжного гальма здійснюється в наступних випадках: - з’явилася відмінність показників між каналами будь-якого з датчиків положення 3, 5 або датчика швидкості 7 - несправність датчика; - з’явилася різниця показників між датчиками положення 3 і 5 усередині одного з каналів мікропроцесорного блоку 1 - прослизання або пробуксовування канатів; Комп’ютерна верстка Н. Лисенко 6 - з’явилася відмінність в показниках швидкості, прискорення, результатів розрахунку захисної тахограми в контролерах 9 і 10 каналів А і Б мікропроцесорного блоку 1 - програмна помилка в роботі мікропроцесорного блоку; - не відповідає або відсутній зв’язок з будьяким з контролерів 9 и 10 каналів А і Б мікропроцесорного блоку 1 - апаратна помилка в роботі мікропроцесорного блоку. Крім цього, мікропроцесорний блок 1, досягши наперед визначених точок шляху, за допомогою модулів виведення дискретних сигналів 15 і 16, видає шляхові команди, що керують електроприводом підйомної установки 4, а також відображає всю інформацію на пристрої відображення 2. шляхом забезпечення постійної Таким чином, діагностики всіх основних вузлів пристрою захисту і контролю руху підйомних установок забезпечується висока надійність і безпека експлуатації підйомних установок. Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for mine winder protection and motion control
Автори англійськоюPopov Mykola Mykolaiovych, Romenskyi Volodymyr Konstiantynovych, Solomatin Leonid Oleksandrovych, Kononenko Oleksii Mykhailovych, Yefremov Dmytro Vladyslavovych, Melnik Yuriy Stanislavovich
Назва патенту російськоюУстройство защиты и контроля движения шахтной подъемной установки
Автори російськоюПопов Николай Николаевич, Роменский Владимир Константинович, Соломатин Леонид Александрович, Кононенко Алексей Михайлович, Ефремов Дмитрий Владиславович, Мельник Юрий Станиславович
МПК / Мітки
МПК: B66B 5/12
Мітки: підйомної, установки, руху, контролю, копальневої, захисту, пристрій
Код посилання
<a href="https://ua.patents.su/3-32732-pristrijj-zakhistu-i-kontrolyu-rukhu-kopalnevo-pidjjomno-ustanovki.html" target="_blank" rel="follow" title="База патентів України">Пристрій захисту і контролю руху копальневої підйомної установки</a>
Спосіб контролю руху сосуду шахтної підйомної установки
Номер патенту: 5146
Опубліковано: 28.12.1994
Автори: Чумакова Людмила Валентинівна, Копилов Володимир Михайлович, Мусієнко Володимир Дмитрович, Гавруцький Олександр Юхимович, Плахотний Петро Іванович, Чаєв Георгій Харитонович, Євглевський Станіслав Іванович, Корольов Леонід Іванович
Мітки: підйомної, установки, спосіб, контролю, сосуду, руху, шахтної
Формула / Реферат:
Способ контроля движения сосуда шахтной подъемной установки, заключающийся в непрерывном измерении величины отклонения направляющих в шахте на пути движения сосуда и сравнении с заданной допустимой величиной, отличающийся тем, что, с целью повышения точности контроля, задают число допустимых отклонений, непрерывно измеряют величину местоположения сосуда, задают установочную величину, сравнивают с измеренной величиной отклонения...
Пристрій для контролю місця розташування підйомної посудини
Номер патенту: 82162
Опубліковано: 11.03.2008
Автори: Мялковський Валентин Йосипович, Демченко Дмитро Миколайович, Чехлатий Андрій Миколайович, Чехлатий Микола Олександрович, Демченко Микола Петрович
МПК: B66B 5/00, B66B 1/00, B66B 3/00
Мітки: підйомної, посудини, контролю, пристрій, місця, розташування
Формула / Реферат:
Пристрій для контролю місця розташування підйомної посудини, що містить блок прийому інформації і блок передачі інформації, до складу якого входять два датчики зближення, розташовані на вертикальній стінці підйомної посудини, який відрізняється тим, що в блок прийому інформації введені два регістри, комутатор, виходи якого підключені до відповідних входів керування першого і другого цифрових індикаторів, інформаційні входи першого і другого...
Регульований дросель вихлопного пристрою підйомної установки
Номер патенту: 15136
Опубліковано: 15.06.2006
Автори: Сиротін Станіслав Степанович, Фетісов Сергій Вікторович
МПК: B66D 5/00
Мітки: дросель, підйомної, вихлопного, регульованій, пристрою, установки
Формула / Реферат:
Регульований дросель вихлопного пристрою підйомної установки, що містить ніпелі, трійник та муфту, який відрізняється тим, що до муфти приєднано універсальний дроселюючий пристрій .
Тренажер оператора шахтної підйомної установки
Номер патенту: 54207
Опубліковано: 17.02.2003
Автори: Пристром Володимир Адольфович, Коваль Анатолій Миколайович, Морозов Вячеслав Андрійович, Толошний Сергій Іванович
Мітки: підйомної, шахтної, установки, оператора, тренажер
Формула / Реферат:
1. Тренажер оператора шахтної підйомної установки, що має пульт оператора з блоком відображення технологічної інформації, перша група виходів і входів якого з'єднана з першими входами і виходами блока моделювання підйомної установки, пульт інструктора, з'єднаний з відповідними входами-виходами згаданого блока моделювання, і блок оперативної пам'яті в складі блока моделювання, який відрізняється тим, що має блок довготермінової пам'яті і блок...
Спосіб орієнтування наземної шахтної підйомної установки

Номер патенту: 19534
Опубліковано: 15.12.2006
Автори: Філатов Валерій Федорович, Кисельов Микола Миколайович, Бєженцев Володимир Ілліч
МПК: E21D 1/00
Мітки: шахтної, підйомної, спосіб, установки, орієнтування, наземної
Формула / Реферат:
Спосіб орієнтування наземної шахтної підйомної установки, що включає формування умовної базової вертикальної площини відносно барабана підйомної машини, який відрізняється тим, що формування умовної базової вертикальної площини здійснюють візуванням від центра підйому на підшківному майданчику на центр підйомної машини, при цьому площина розміщується і проходить через центр підйому і центр підйомної машини в машинному залі; формують в...
Попередній патент: Спосіб виготовлення торта “чорнослив”
Наступний патент: Спосіб зварювання під шаром флюсу
Випадковий патент: Спосіб оцінки організації ядерного хроматину клітин людини та тварин