Пристрій для виставлення осі чутливості гравіметричної системи
Номер патенту: 90621
Опубліковано: 11.05.2010
Автори: Безвесільна Олена Миколаївна, Подчашинський Юрій Олександрович, Киричук Юрій Володимирович, Гнатейко Нонна Валентинівна
Формула / Реферат
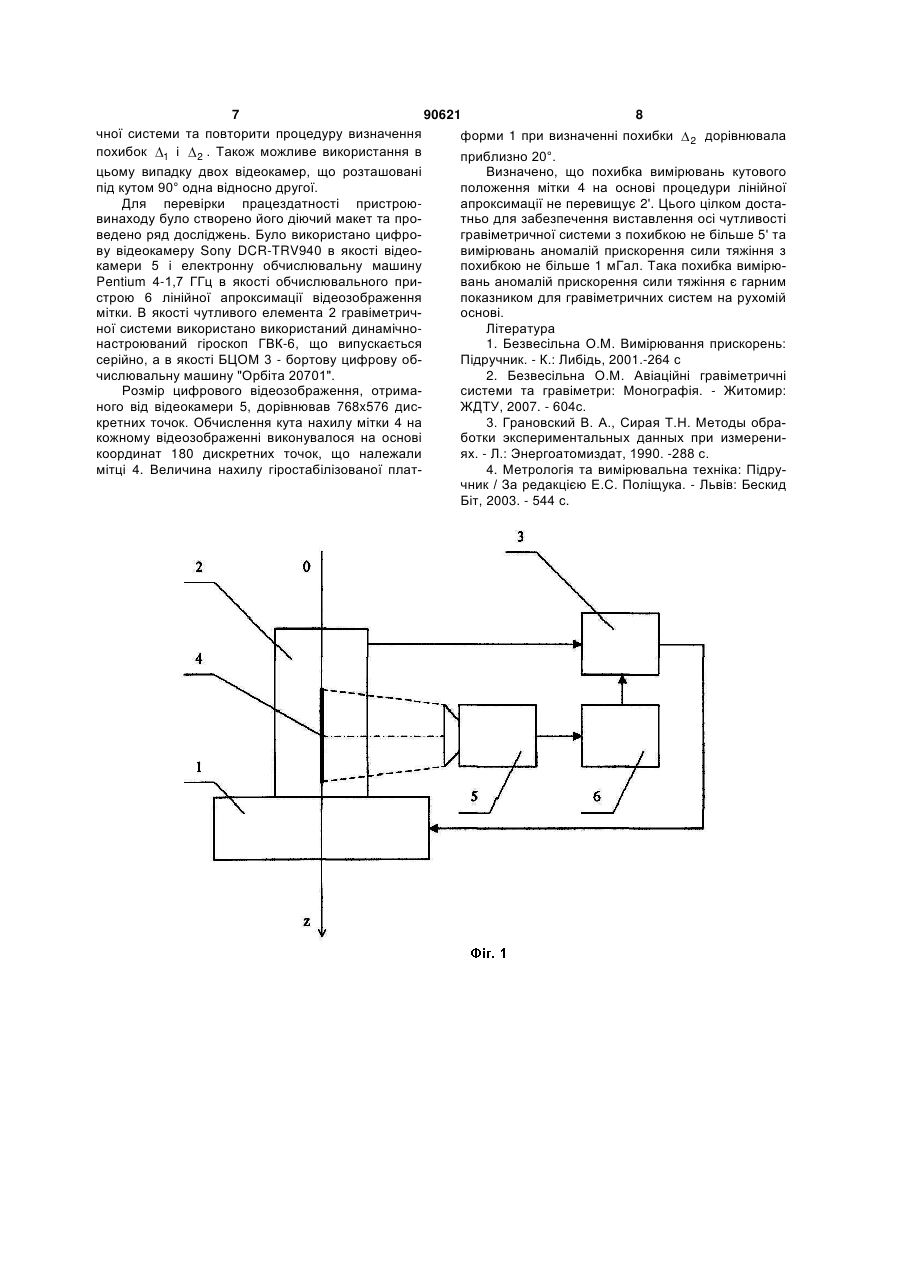
Пристрій для виставлення осі чутливості гравіметричної системи, що містить гіростабілізовану платформу (1), на якій закріплений чутливий елемент (2) гравіметричної системи, та бортову цифрову обчислювальнумашину (3) (БЦОМ), вхід якої підключений до виходу чутливого елемента (2) гравіметричної системи, а вихід - до входу керування гіростабілізованої платформи (1), який відрізняється тим, що на корпус чутливого елемента (2) гравіметричної системи нанесена мітка (4) у вигляді відрізка прямої лінії, напрямок якої співпадає з напрямком осі чутливості чутливого елемента (2) гравіметричної системи, а також додатково введені відеокамера (5), вхід якої оптично пов'язаний з міткою (4), та обчислювальний пристрій (6) лінійної апроксимації відеозображення мітки, вхід якого підключений до виходу відеокамери (5), а вихід - до додаткового входу БЦОМ (3).
Текст
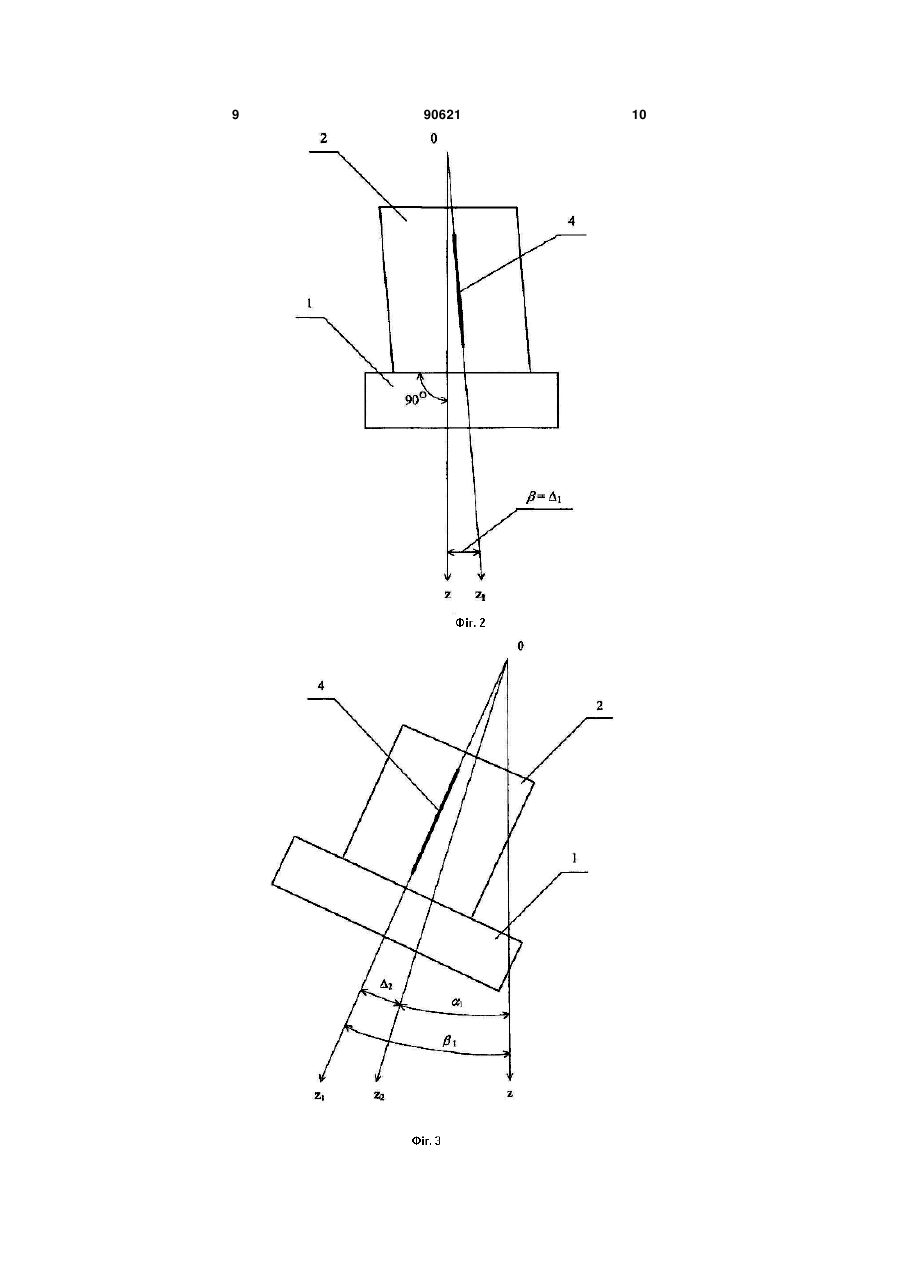
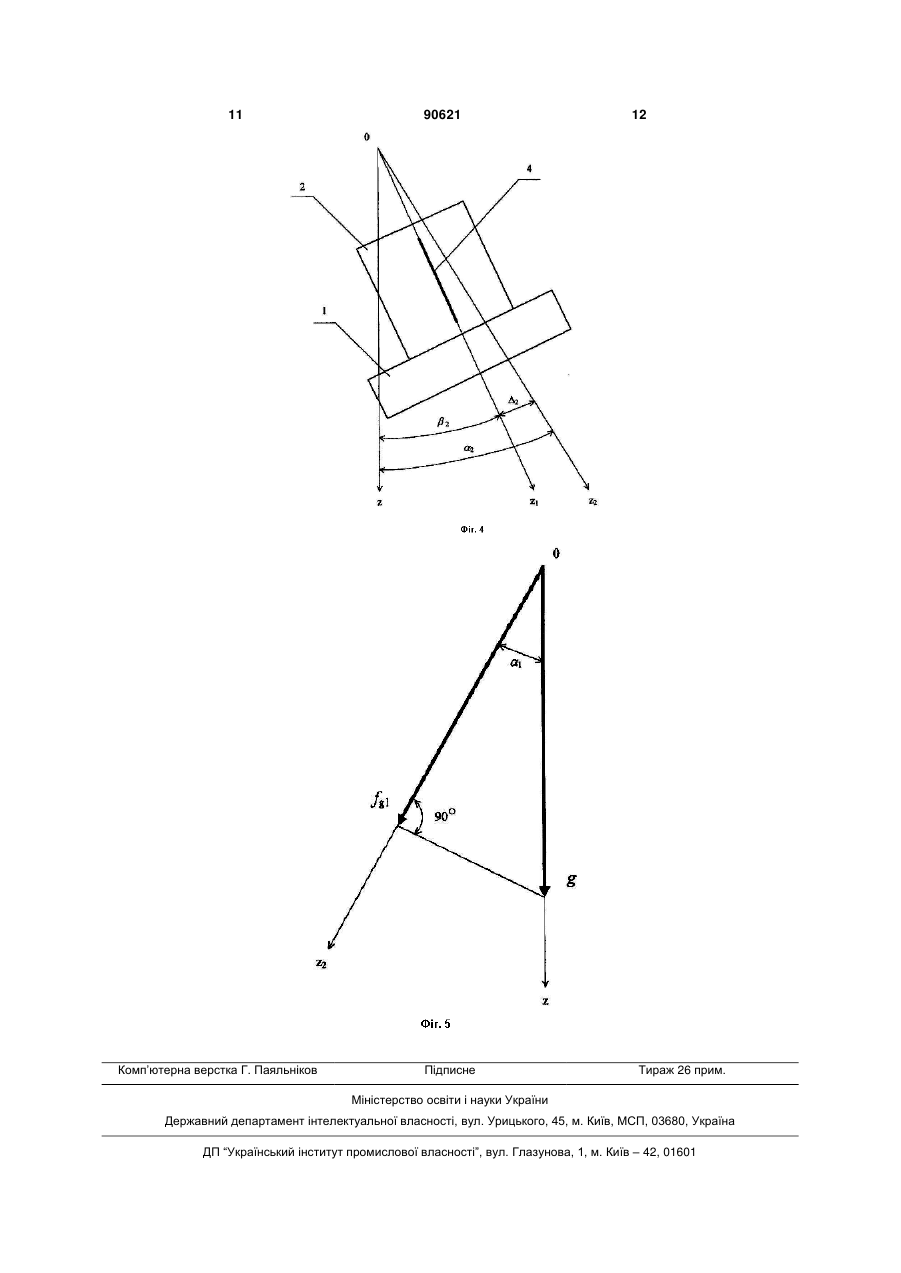
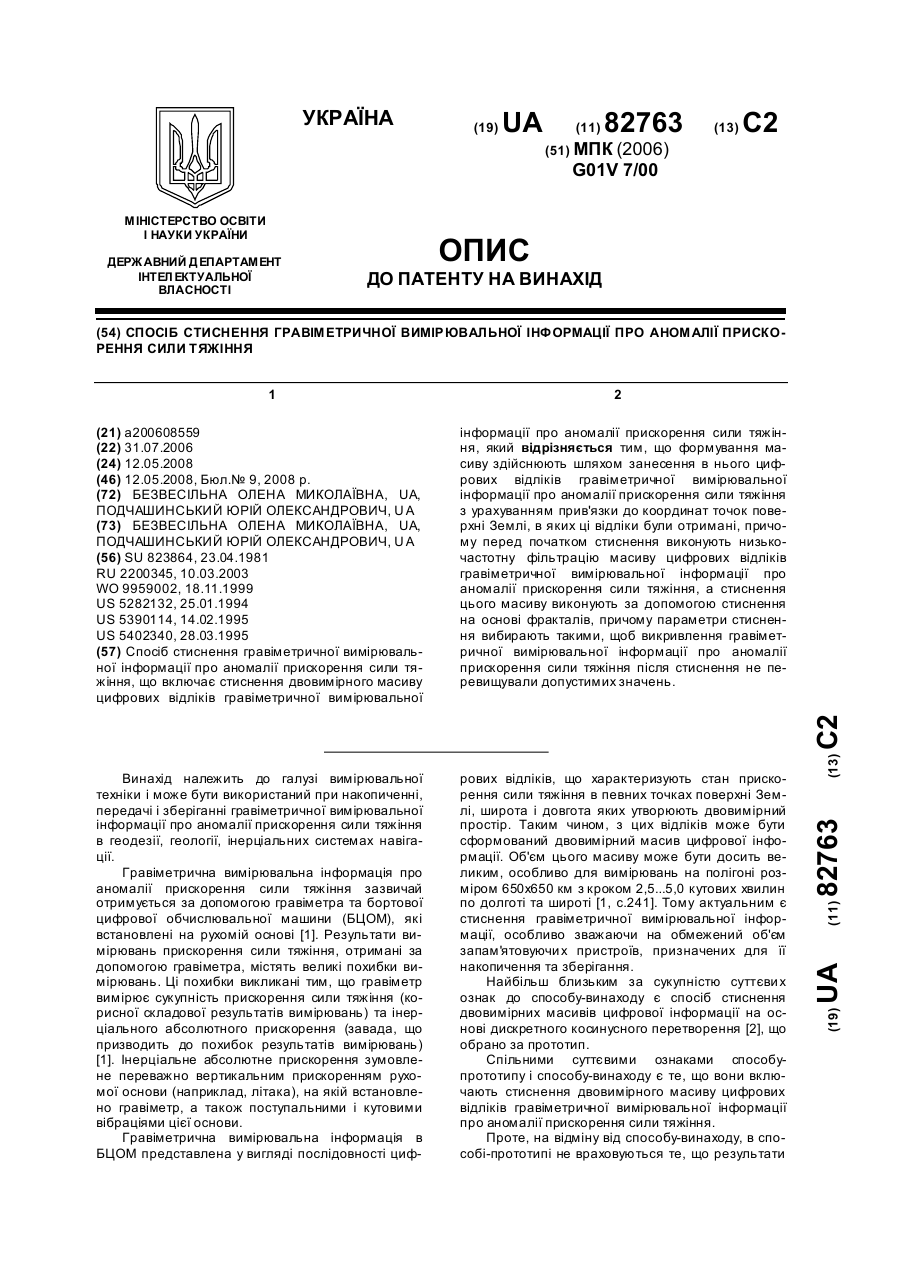
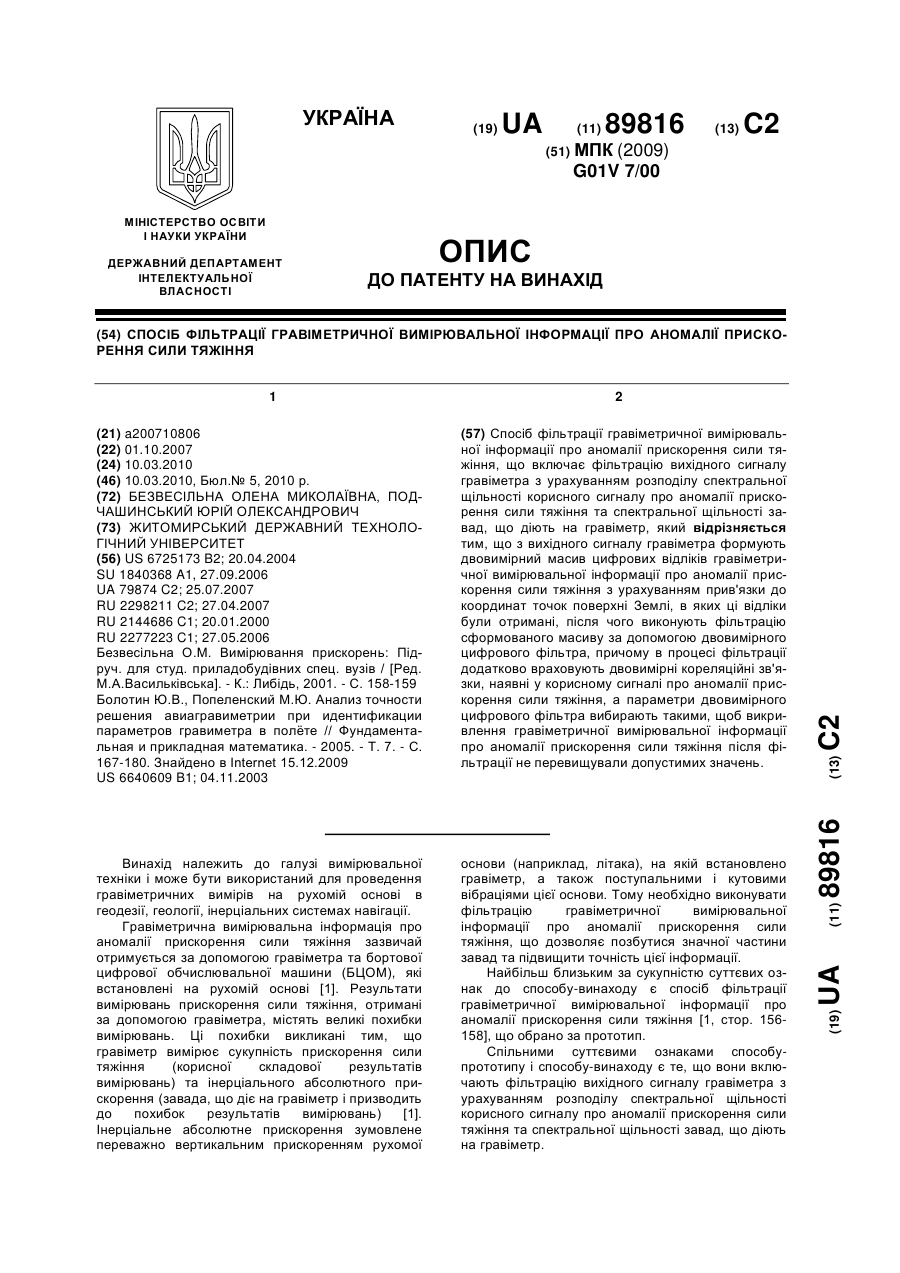
Пристрій для виставлення осі чутливості гравіметричної системи, що містить гіростабілізовану 3 90621 4 ми відносно напрямку повного вектора прискорен- фіг. 2 - схема визначення похибки виставня сили тяжіння. лення осі чутливості гравіметричної системи, що В результаті всього вищезазначеного, похибка обумовлена похибками виконання кріплення чутвиставлення осі чутливості гравіметричної систеливого елемента гравіметричної системи на гіросми у пристрої-прототипі може досягати декількох табілізованій платформі; градусів. Така похибка є неприпустимо великою. - фіг. 3 і 4 - схема визначення похибки виставНаприклад, для забезпечення точності вимірювань лення осі чутливості гравіметричної системи, що аномалій прискорення сили тяжіння в 1 мГал необумовлена незбігом напрямку мітки і дійсного обхідно виставляти ось чутливості гравіметричної напрямку осі чутливості чутливого елемента грасистеми з похибкою не більше 5' [2, с. 306-307]. віметричної системи; Таким чином, суттєвим недоліком пристрою- фіг. 5 - схема визначення проекції повного прототипу є неточне виставлення осі чутливості вектора прискорення сили тяжіння на ось чутливогравіметричної системи і, як наслідок, низька точсті чутливого елемента гравіметричної системи. ність вимірювань аномалій прискорення сили тяПристрій для виставлення осі чутливості гражіння. віметричної системи (фіг. 1) містить гіростабілізоВ основу винаходу поставлена задача удосковану платформу 1, на якій закріплено чутливий налення пристрою для виставлення осі чутливості елемент 2 гравіметричної системи, бортову цифгравіметричної системи, щоб забезпечити підвирову обчислювальну машину З (БЦОМ), мітку 4, щення точності виставлення осі чутливості гравівідеокамеру 5 та обчислювальний пристрій 6 ліметричної системи і, на цій основі, суттєве підвинійної апроксимації відеозображення мітки. Мітка 4 щення точності вимірювань прискорення сили виконана у вигляді відрізку прямої лінії, що нанетяжіння такою гравіметричною системою. Поставсена на корпус чутливого елемента 2 гравіметричлена задача вирішується шляхом того, що на корної системи. Напрямок мітки 4 співпадає з напрямпус чутливого елемента гравіметричної системи ком осі чутливості цього чутливого елемента 2. нанесено мітку у вигляді відрізку прямої лінії, наВхід БЦОМ 3 підключено до виходу чутливого прямок якої співпадає з напрямком осі чутливості елемента 2 гравіметричної системи, а вихід - до чутливого елемента гравіметричної системи, довходу керування гіростабілізованої платформи 1. датково введені відеокамера, вхід якої оптично Вхід відеокамери 5 оптично пов'язаний з міткою 4, пов'язаний з міткою, та обчислювальний пристрій а вихід підключено до входу обчислювального лінійної апроксимації відеозображення мітки, вхід пристрою 6 лінійної апроксимації відеозображення якого підключений до виходу відеокамери, а вихід мітки, вихід якого підключено до додаткового вхо- до додаткового входу БЦОМ. ду БЦОМ 3. Підвищення точності виставлення осі чутливоПристрій для виставлення осі чутливості грасті в пристрої-винаході забезпечується за рахунок віметричної системи працює таким чином. введення до його складу блоків, що разом з БЦОМ В результаті обертання в просторі гіростабілізабезпечують компенсацію похибки відтворення зована платформа 1 приймає таке положення, що дійсного напрямку осі чутливості чутливого еленапрямок її вертикальної осі збігається з напряммента гравіметричної системи при його кріпленні ком місцевої вертикалі 0z та, відповідно, напрямна гіростабілізованій платформі. Цими блоками є ком повного вектора прискорення сили тяжіння відеокамера, мітка у вигляді відрізку прямої лінії, (фіг. 2). Такий поворот виконується на основі поканапрямок якої співпадає з напрямком осі чутливозань акселерометрів (на схемі не показані), що сті чутливого елемента гравіметричної системи, та входять до складу гіростабілізованої платформи 1, обчислювальний пристрій лінійної апроксимації та сигналів керування, що надходять від БЦОМ 3. відеозображення цієї мітки. Також попередньо виконується калібрування та При цьому відеокамера та обчислювальний просторова орієнтація відеокамери 5 за допомопристрій лінійної апроксимації відеозображення гою допоміжних засобів (наприклад, рівня та кутомітки забезпечують високоточне визначення орієвимірювального пристрою, на схемі не показані). нтації у вертикальній площині чутливого елемента Ця процедура виконується таким чином, щоб вергравіметричної системи. Це відбувається завдяки тикальна вісь відеозображень, що отримані за довластивостям процедури лінійної апроксимації помогою відеокамери 5 та надходять до обчислювідеозображення мітки [4, с. 113-117]. БЦОМ на вального пристрою 6 лінійної апроксимації основі вказаних результатів обчислює поправки відеозображення мітки, співпадала з напрямком просторової орієнтації гіростабілізованої платфомісцевої вертикалі. рми та подає керуючі сигнали на цю платформу Далі у відеокамері 5 формується відеозобратаким чином, щоб напрямок осі чутливості гравіження мітки 4, що нанесена на корпус чутливого метричної системи, визначений на основі мітки, елемента 2 гравіметричної системи. Відеозобраточно співпадав з напрямком повного вектора приження мітки 4 від відеокамери 5 надходить до обскорення сили тяжіння. числювального пристрою 6 лінійної апроксимації Таким чином, пристрій-винахід забезпечує підвідеозображення мітки, який виконує процедуру вищення точності виставлення осі чутливості гралінійної апроксимації відеозображення мітки 4 та віметричної системи і, як наслідок, суттєве підвивизначає кут нахилу мітки 4 відносно місцевої щення точності вимірювань прискорення сили вертикалі. Кут дорівнює похибці 1 , виставлентяжіння такою гравіметричною системою. ня осі чутливості гравіметричної системи. Ця поСуть винаходу пояснюється кресленнями. хибка зумовлена похибкою виконання кріплення Перелік креслень: - фіг. 1 - структурна схема пристрою; 5 90621 6 чутливого елемента 2 гравіметричної системи на fg2 = fg1. (3) гіростабілізованій платформі 1. При цьому Найкращий результат з точки зору підвищення fg2 g cos 2 , (4) точності вимірювань дає лінійна апроксимація віде 2 - кут між дійсним напрямком осі чутливості деозображення мітки 4 за методом найменших чутливого елемента 2 гравіметричної системи і квадратів або на основі дробово-раціональних напрямком місцевої вертикалі, яка співпадає з оцінок [3, 4]. Така апроксимація приводить до зменапрямком повного вектора прискорення сили тяншення впливу шумів, наявних у вихідному сигналі жіння. відеокамери 5, та похибок вимірювань, обумовлеДля цього чутливий елемент 2 гравіметричної них дискретним характером цифрового відеозобсистеми вимірює проекцію повного вектора присраження, на результат вимірювань. Це відбуваєтькорення сили тяжіння на свою вісь чутливості і ся завдяки властивостям процедури лінійної надсилає результат вимірювань fg2 до БЦОМ 3. апроксимації [4, с 113-117]. Одночасно з цим відеокамера 5 формує відеоРезультат вимірювань кута = 1 надходить зображення мітки 4, а обчислювальний пристрій 6 до БЦОМ 3, яка формує керуючі сигнали для гіролінійної апроксимації відеозображення мітки вистабілізованої платформи 1. В результаті гіростазначає кут 2 нахилу цієї мітки 4 відносно місцевої білізована платформа 1 змінює свою просторову вертикалі. орієнтацію таким чином, щоб напрямок осі чутлиЗ фіг. 4 випливає, що вості 0z1 гравіметричної системи, визначений за (5) допомогою мітки 4, співпадав з напрямком місце2+ 2 = 2. вої вертикалі та, відповідно, з напрямком повного Оскільки значення модуля повного вектора вектора прискорення сили тяжіння. прискорення сили тяжіння g не змінюється, то з Таким чином, в пристрої-винаході забезпечуформул (1), (3) і (4) випливає, що 1 = 2 . Тоді, ється компенсація похибки виставлення осі чутлипорівнюючи формули (2) і (5), можна отримати вості гравіметричної системи 1 . Ця похибка обуспіввідношення мовлена похибкою виконання кріплення чутливого 12+ 2 . 2 = елемента 2 гравіметричної системи на гіростабіліЗвідси отримуємо значення похибки виставзованій платформі 1. лення осі чутливості гравіметричної системи, що Розглянемо компенсацію похибки 2 , що обуобчислюється у БЦОМ 3 за формулою: мовлена незбігом напрямку мітки 4 з дійсним на1 2. прямком осі чутливості 0z2 чутливого елемента 2 2 2 гравіметричної системи (фіг. 3 і 4). При цьому вваЦя похибка обумовлена незбігом напрямку міжаємо, що похибка 1 вже зкомпенсована. тки 4 з дійсним напрямком осі чутливості чутливоДля цього гіростабілізована платформа 1 під го елемента 2 гравіметричної системи. Якщо дією сигналів керування від БЦОМ 3 відхиляється 1> 2,то 2 >0 (цю похибку відраховуємо проти за годинниковою стрілкою від напрямку місцевої годинникової стрілки від напрямку місцевої вертивертикалі на заданий кут у діапазоні від 0° до 90° калі). Якщо 1< 2, то 2
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for alignment of sensitivity axis of gravimetric system
Автори англійськоюBezvesilna Olena Mykolaivna, Podchashynskyi Yurii Oleksandrovych, Kyrychuk Yurii Volodymyrovych, Hnateiko Nonna Valentynivna
Назва патенту російськоюУстройство для выставления оси чувствительности гравиметрической системы
Автори російськоюБезвесильна Елена Николаевна, Подчашинский Юрий Александрович, Киричук Юрий Владимирович, Гнатейко Нонна Валентиновна
МПК / Мітки
МПК: G01V 7/00
Мітки: системі, осі, пристрій, гравіметричної, чутливості, виставлення
Код посилання
<a href="https://ua.patents.su/6-90621-pristrijj-dlya-vistavlennya-osi-chutlivosti-gravimetrichno-sistemi.html" target="_blank" rel="follow" title="База патентів України">Пристрій для виставлення осі чутливості гравіметричної системи</a>
Спосіб стиснення гравіметричної вимірювальної інформації про аномалії прискорення сили тяжіння
Номер патенту: 82763
Опубліковано: 12.05.2008
Автори: Безвесільна Олена Миколаївна, Подчашинський Юрій Олександрович
МПК: G01V 7/00
Мітки: інформації, прискорення, вимірювальної, стиснення, аномалії, спосіб, гравіметричної, тяжіння, сили
Формула / Реферат:
Спосіб стиснення гравіметричної вимірювальної інформації про аномалії прискорення сили тяжіння, що включає стиснення двовимірного масиву цифрових відліків гравіметричної вимірювальної інформації про аномалії прискорення сили тяжіння, який відрізняється тим, що формування масиву здійснюють шляхом занесення в нього цифрових відліків гравіметричної вимірювальної інформації про аномалії прискорення сили тяжіння з урахуванням прив'язки до...
Спосіб фільтрації гравіметричної вимірювальної інформації про аномалії прискорення сили тяжіння
Номер патенту: 89816
Опубліковано: 10.03.2010
Автори: Безвесільна Олена Миколаївна, Подчашинський Юрій Олександрович
МПК: G01V 7/00
Мітки: спосіб, фільтрації, інформації, сили, гравіметричної, аномалії, прискорення, тяжіння, вимірювальної
Формула / Реферат:
Спосіб фільтрації гравіметричної вимірювальної інформації про аномалії прискорення сили тяжіння, що включає фільтрацію вихідного сигналу гравіметра з урахуванням розподілу спектральної щільності корисного сигналу про аномалії прискорення сили тяжіння та спектральної щільності завад, що діють на гравіметр, який відрізняється тим, що з вихідного сигналу гравіметра формують двовимірний масив цифрових відліків гравіметричної вимірювальної...
Спосіб вимірювання аномалій прискорень сили тяжіння
Номер патенту: 45567
Опубліковано: 10.11.2009
Автори: Гнатенко Нона Валентинівна, Безвесільна Олена Миколаївна, Киричук Юрій Володимирович, Ткаченко Світлана Сергіївна
МПК: G01V 7/00
Мітки: тяжіння, аномалій, вимірювання, сили, прискорень, спосіб
Формула / Реферат:
Спосіб вимірювання аномалій прискорень сили тяжіння, що включає вимірювання навігаційних параметрів, значення висоти та питомої сили тяжіння за допомогою гіроскопічного гравіметра, який встановлено на гіростабілізованій платформі, яка під час обертання в просторі приймає таке положення, що напрямок її вертикальної осі збігається з напрямком місцевої вертикалі на основі показань акселерометрів, які входять до її складу, і на основі вхідних...
Спосіб високоточного виставлення заданої величини люфту або натягу в опорному вузлі кочення системи “вал-корпус”
Номер патенту: 70601
Опубліковано: 15.09.2006
Автори: Добровольський Олександр Васильович, Дмітрієв Станислав Іванович
МПК: F16C 35/04
Мітки: люфту, виставлення, величини, кочення, вузлі, натягу, системі, вал-корпус, високоточного, спосіб, заданої, опорному
Формула / Реферат:
1. Спосіб виготовлення скульптури, що полягає у виготовленні її окремих скульптурних елементів та наступному їх збиранні, який відрізняється тим, що скульптурні елементи виготовляють з легких будівельних матеріалів, наприклад, пінопласту або деревини, які з'єднують, і на отриману у такий спосіб модель скульптури наклеюють тканий матеріал, який просочують клеєм з подальшим нанесенням на нього сухої цементнопісчаної суміші.2. Спосіб за...
Спосіб високоточного виставлення заданої величини люфту (натягу) в опорному вузлі кочення системи “вал-корпус”
Номер патенту: 70601
Опубліковано: 15.10.2004
Автори: Добровольський Олександр Васильович, Дмітрієв Станислав Іванович
МПК: F16C 35/04
Мітки: високоточного, спосіб, вузлі, опорному, системі, вал-корпус, величини, виставлення, заданої, кочення, натягу, люфту
Формула / Реферат:
1. Спосіб виготовлення скульптури, що полягає у виготовленні її окремих скульптурних елементів та наступному їх збиранні, який відрізняється тим, що скульптурні елементи виготовляють з легких будівельних матеріалів, наприклад, пінопласту або деревини, які з'єднують, і на отриману у такий спосіб модель скульптури наклеюють тканий матеріал, який просочують клеєм з подальшим нанесенням на нього сухої цементнопісчаної суміші.2. Спосіб за...
Попередній патент: Шихта для виготовлення робочої частини безвипалювального бікерамічного вогнетривкого виробу
Наступний патент: Твердий розчин дифосфатів кобальту (іі) і мангану (іі) та спосіб його одержання
Випадковий патент: Гайка