Пристрій для телекерування об’єктами з дисперсійно-частотним компандуванням фінітних низькочастотних сигналів

Формула / Реферат
Пристрій для телекерування об'єктами з дисперсійно-частотним компандуванням фінітних низькочастотних сигналів, що на передавальній стороні містить дисперсійну лінію затримки (ДЛЗ) певного порядку, функція групового часу затримки (ГЧЗ) якої має певне значення крутості а, який відрізняється тим, що ця ДЛЗ є низкочастотною (НЧ) лінією, на вході якої введено частотний модулятор (ЧМ), на її виході - фільтр нижніх частот (ФНЧ), на виході якого введено односмуговий модулятор (ОМ), на приймальній стороні пристрою введено послідовно з'єднані односмуговий демодулятор (ОД), другі ЧМ та НЧ ДЛЗ, яка має однаковий порядок з першою ДЛЗ і зменшене значення крутості функції ГЧЗ, при цьому обидва ЧМ модулюють вхідний сигнал за принципом множення його на вираз ![]() , у якому
, у якому ![]() є значення функції ГЧЗ, яке відповідає частоті
є значення функції ГЧЗ, яке відповідає частоті ![]() .
.
Текст
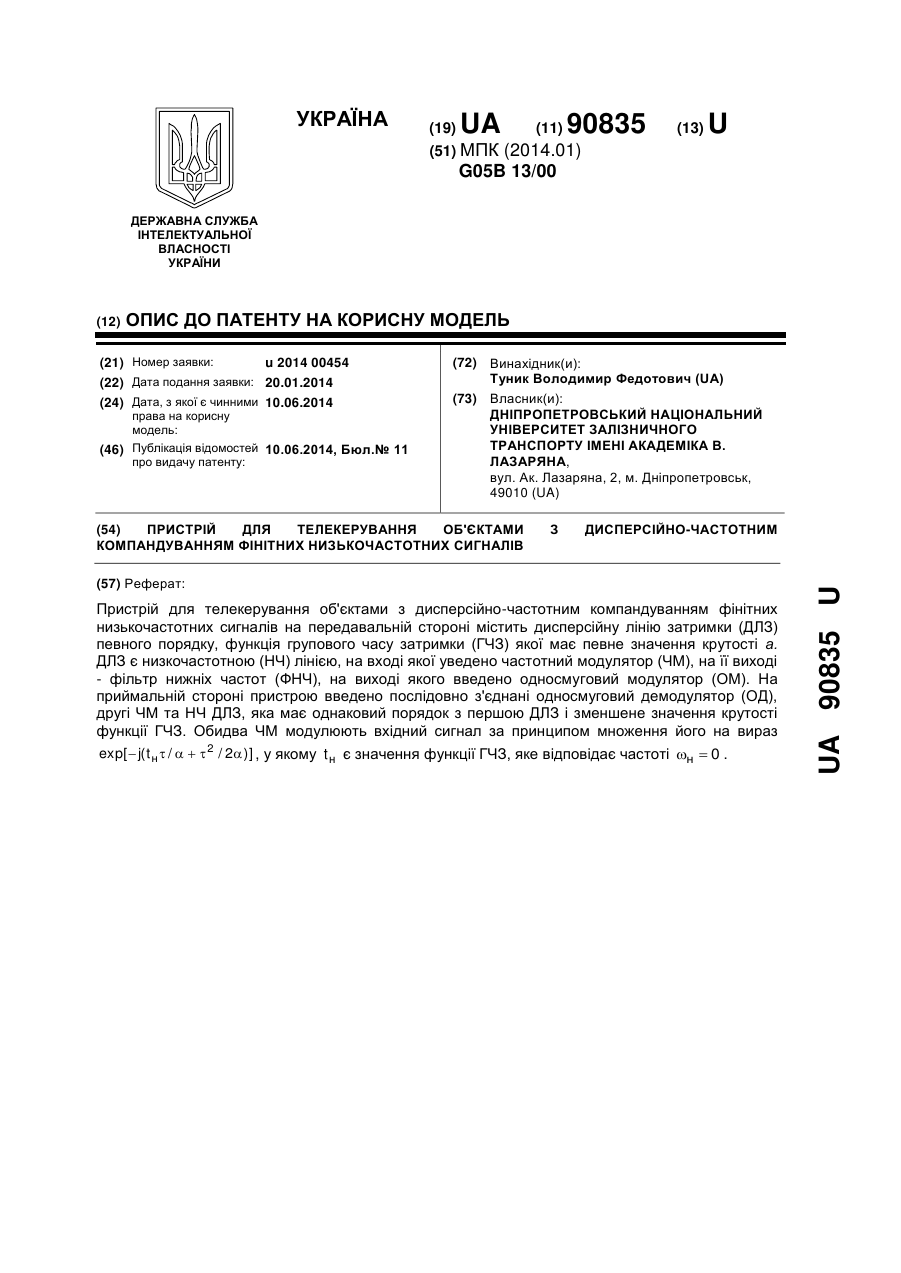
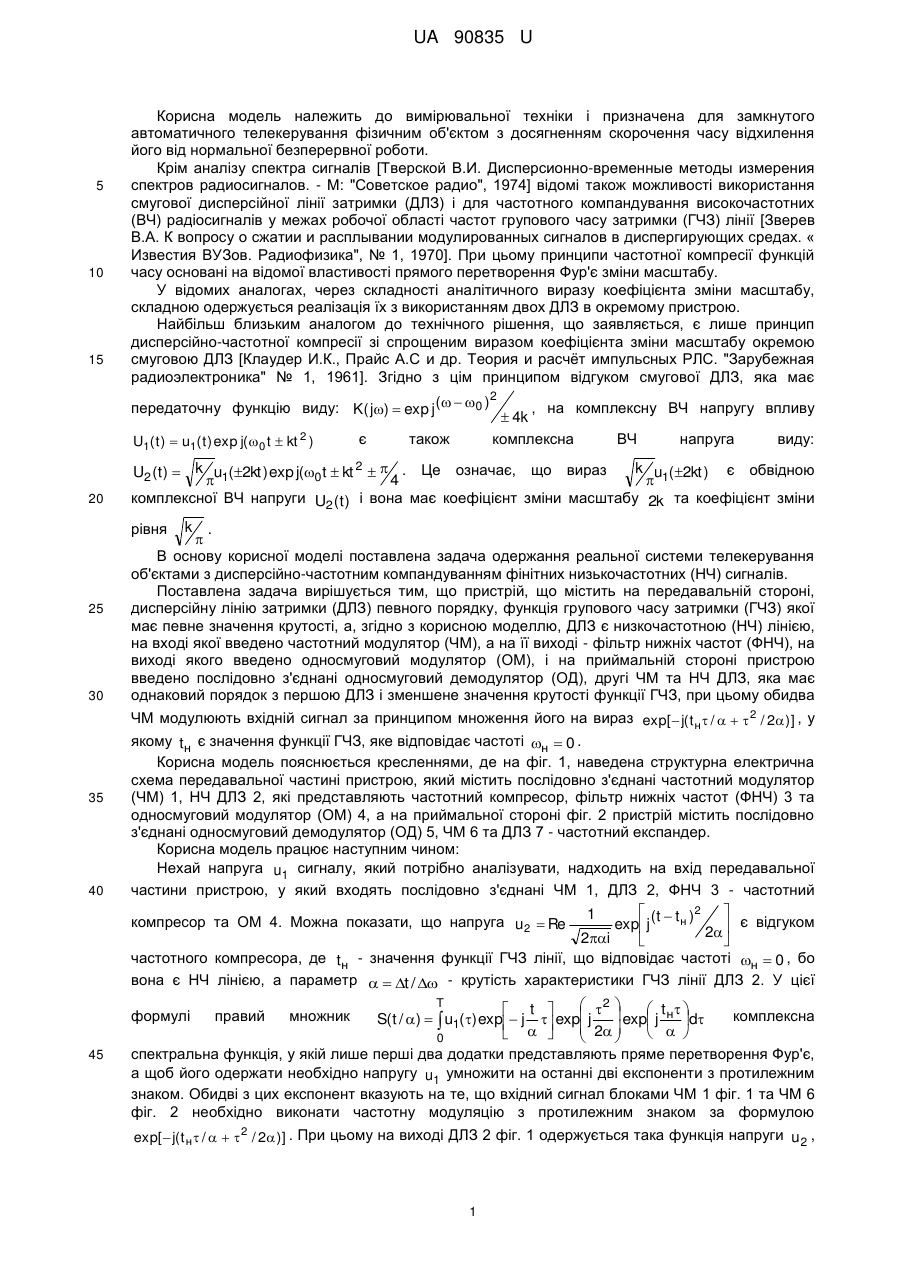
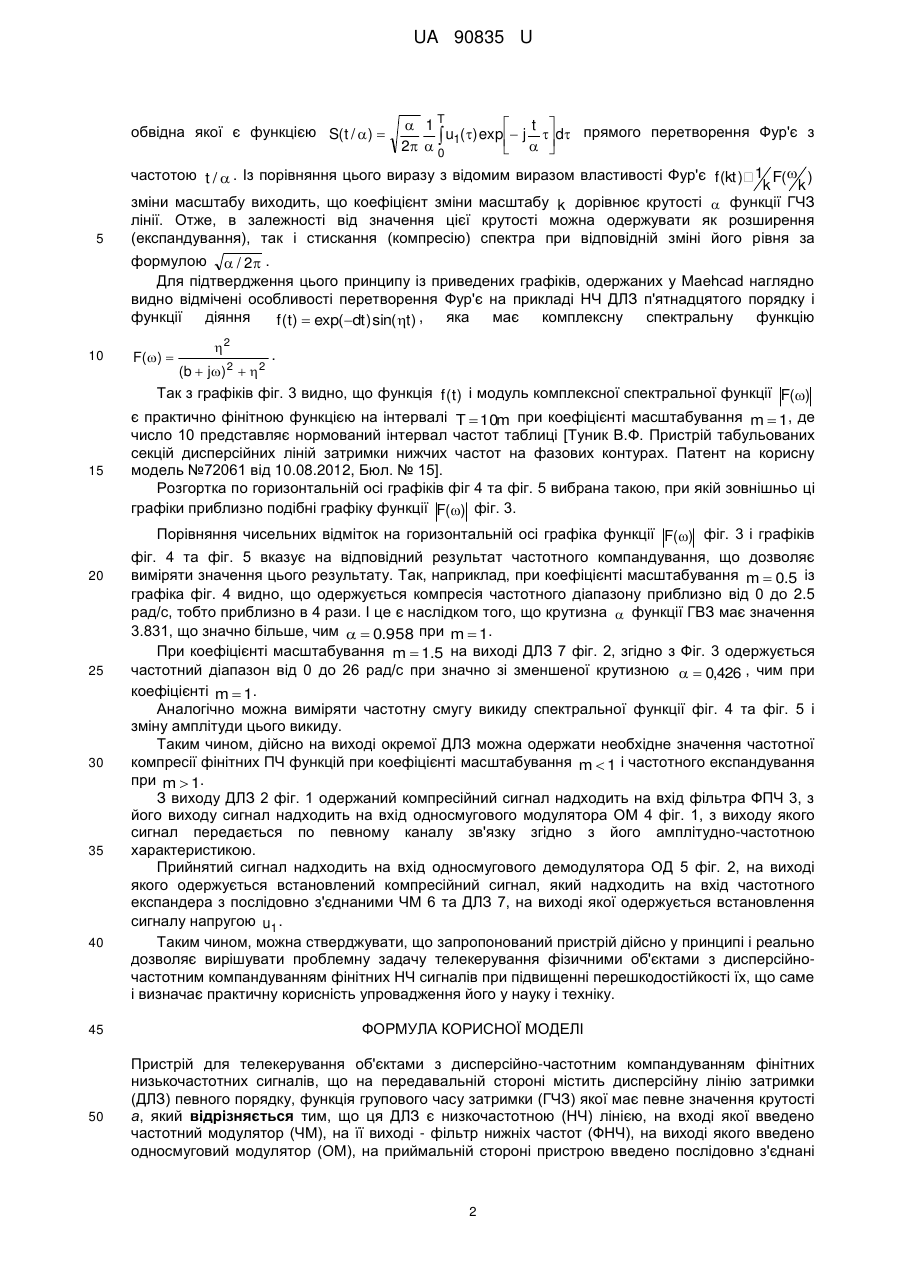
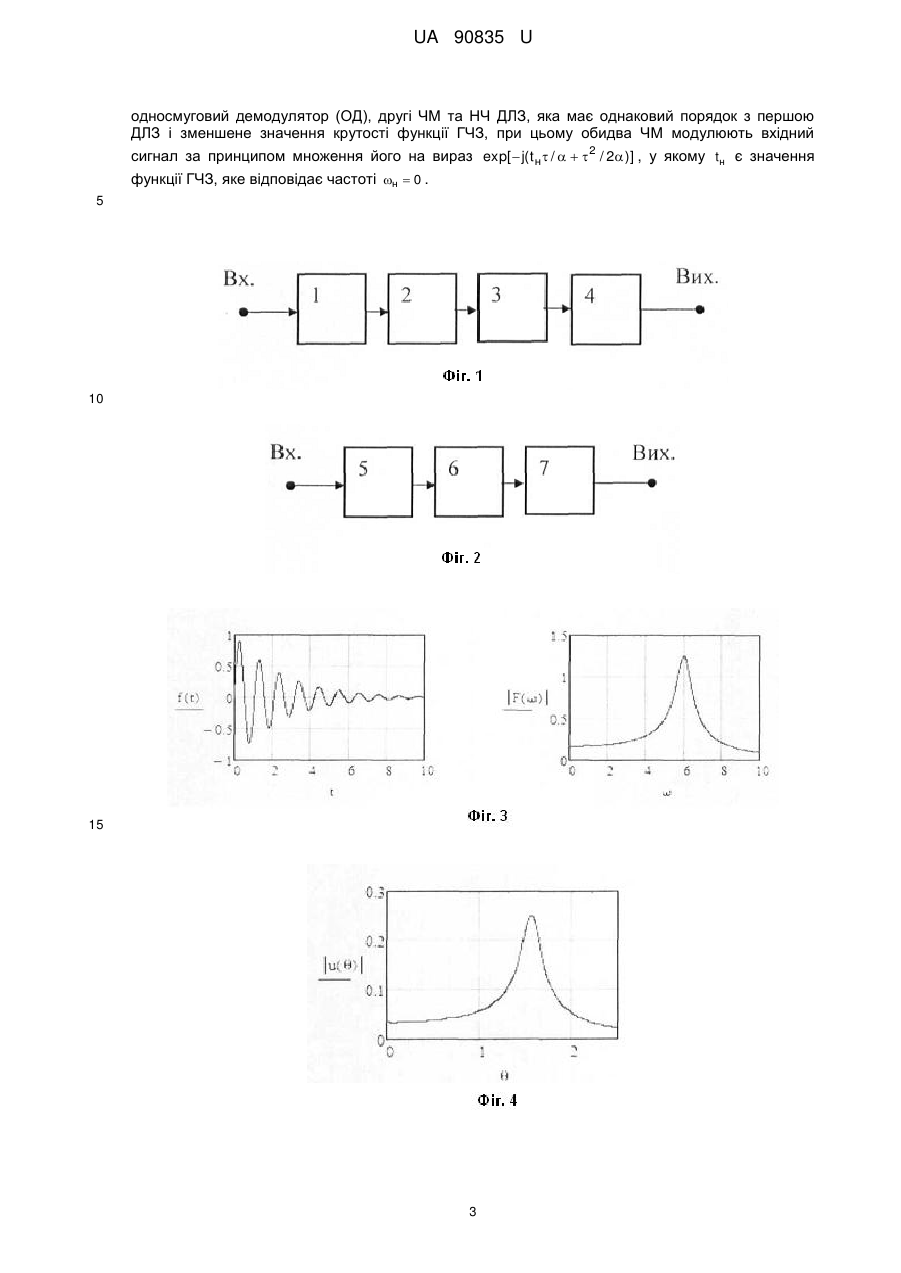
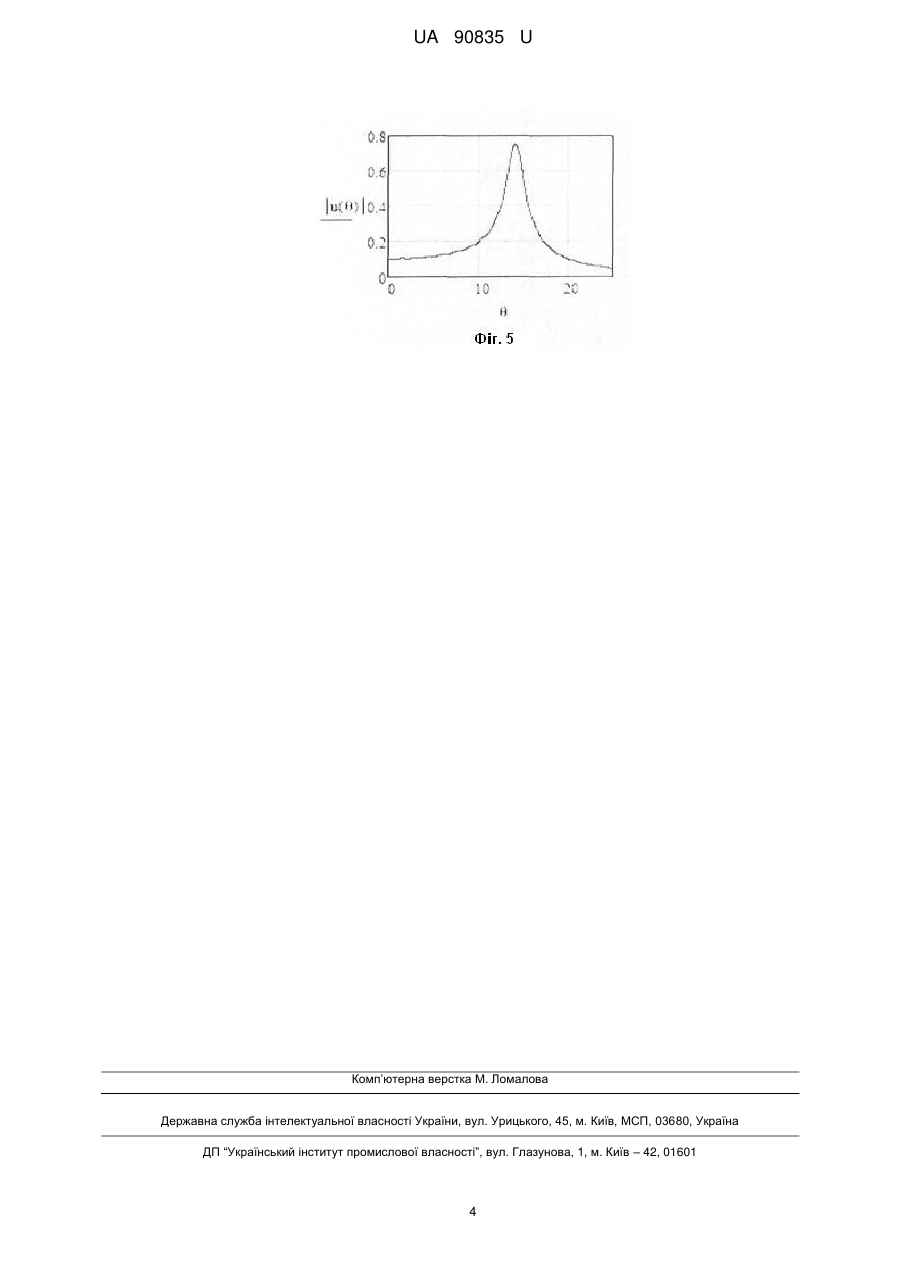
Реферат: Пристрій для телекерування об'єктами з дисперсійно-частотним компандуванням фінітних низькочастотних сигналів на передавальній стороні містить дисперсійну лінію затримки (ДЛЗ) певного порядку, функція групового часу затримки (ГЧЗ) якої має певне значення крутості а. ДЛЗ є низкочастотною (НЧ) лінією, на вході якої уведено частотний модулятор (ЧМ), на її виході - фільтр нижніх частот (ФНЧ), на виході якого введено односмуговий модулятор (ОМ). На приймальній стороні пристрою введено послідовно з'єднані односмуговий демодулятор (ОД), другі ЧМ та НЧ ДЛЗ, яка має однаковий порядок з першою ДЛЗ і зменшене значення крутості функції ГЧЗ. Обидва ЧМ модулюють вхідний сигнал за принципом множення його на вираз exp[ j( t н / 2 / 2 )] , у якому t н є значення функції ГЧЗ, яке відповідає частоті н 0 . UA 90835 U (12) UA 90835 U UA 90835 U 5 10 15 Корисна модель належить до вимірювальної техніки і призначена для замкнутого автоматичного телекерування фізичним об'єктом з досягненням скорочення часу відхилення його від нормальної безперервної роботи. Крім аналізу спектра сигналів [Тверской В.И. Дисперсионно-временные методы измерения спектров радиосигналов. - М: "Советское радио", 1974] відомі також можливості використання смугової дисперсійної лінії затримки (ДЛЗ) і для частотного компандування високочастотних (ВЧ) радіосигналів у межах робочої області частот групового часу затримки (ГЧЗ) лінії [Зверев В.А. К вопросу о сжатии и расплывании модулированных сигналов в диспергирующих средах. « Известия ВУЗов. Радиофизика", № 1, 1970]. При цьому принципи частотної компресії функцій часу основані на відомої властивості прямого перетворення Фур'є зміни масштабу. У відомих аналогах, через складності аналітичного виразу коефіцієнта зміни масштабу, складною одержується реалізація їх з використанням двох ДЛЗ в окремому пристрою. Найбільш близьким аналогом до технічного рішення, що заявляється, є лише принцип дисперсійно-частотної компресії зі спрощеним виразом коефіцієнта зміни масштабу окремою смуговою ДЛЗ [Клаудер И.К., Прайс А.С и др. Теория и расчёт импульсных РЛС. "Зарубежная радиоэлектроника" № 1, 1961]. Згідно з цім принципом відгуком смугової ДЛЗ, яка має передаточну функцію виду: K( j) exp j ( 0 ) U1( t ) u1( t ) exp j(0 t kt 2 ) 20 30 35 40 також , на комплексну ВЧ напругу впливу 4k комплексна ВЧ напруга виду: k u1( 2kt ) є обвідною U2 ( t ) k u1( 2kt ) exp j(0 t kt 2 . Цe означає, що вираз 4 комплексної ВЧ напруги U2 (t ) і вона має коефіцієнт зміни масштабу 2k та коефіцієнт зміни рівня 25 є 2 k . В основу корисної моделі поставлена задача одержання реальної системи телекерування об'єктами з дисперсійно-частотним компандуванням фінітних низькочастотних (НЧ) сигналів. Поставлена задача вирішується тим, що пристрій, що містить на передавальній стороні, дисперсійну лінію затримки (ДЛЗ) певного порядку, функція групового часу затримки (ГЧЗ) якої має певне значення крутості, а, згідно з корисною моделлю, ДЛЗ є низкочастотною (НЧ) лінією, на вході якої введено частотний модулятор (ЧМ), а на її виході - фільтр нижніх частот (ФНЧ), на виході якого введено односмуговий модулятор (ОМ), і на приймальній стороні пристрою введено послідовно з'єднані односмуговий демодулятор (ОД), другі ЧМ та НЧ ДЛЗ, яка має однаковий порядок з першою ДЛЗ і зменшене значення крутості функції ГЧЗ, при цьому обидва ЧМ модулюють вхідній сигнал за принципом множення його на вираз exp[ j( t н / 2 / 2 )] , у якому tн є значення функції ГЧЗ, яке відповідає частоті н 0 . Корисна модель пояснюється кресленнями, де на фіг. 1, наведена структурна електрична схема передавальної частині пристрою, який містить послідовно з'єднані частотний модулятор (ЧМ) 1, НЧ ДЛЗ 2, які представляють частотний компресор, фільтр нижніх частот (ФНЧ) 3 та односмуговий модулятор (ОМ) 4, а на приймальної стороні фіг. 2 пристрій містить послідовно з'єднані односмуговий демодулятор (ОД) 5, ЧМ 6 та ДЛЗ 7 - частотний експандер. Корисна модель працює наступним чином: Нехай напруга u1 сигналу, який потрібно аналізувати, надходить на вхід передавальної частини пристрою, у який входять послідовно з'єднані ЧМ 1, ДЛЗ 2, ФНЧ 3 - частотний 2 є відгуком exp j ( t t н ) 2 2i частотного компресора, де tн - значення функції ГЧЗ лінії, що відповідає частоті н 0 , бо вона є НЧ лінією, а параметр t / - крутість характеристики ГЧЗ лінії ДЛЗ 2. У цієї T 2 t exp j t н d формулі правий множник комплексна S(t / ) u1() exp j exp j 2 0 спектральна функція, у якій лише перші два додатки представляють пряме перетворення Фур'є, а щоб його одержати необхідно напругу u1 умножити на останні дві експоненти з протилежним знаком. Обидві з цих експонент вказують на те, що вхідний сигнал блоками ЧМ 1 фіг. 1 та ЧМ 6 фіг. 2 необхідно виконати частотну модуляцію з протилежним знаком за формулою компресор та ОМ 4. Можна показати, що напруга u 2 Re 45 1 exp[ j( t н / 2 / 2 )] . При цьому на виході ДЛЗ 2 фіг. 1 одержується така функція напруги u 2 , 1 UA 90835 U обвідна якої є функцією S( t / ) 5 1T t u1( ) exp j d прямого перетворення Фур'є з 2 0 частотою t / . Із порівняння цього виразу з відомим виразом властивості Фур'є f (kt ) 1 F( ) k k зміни масштабу виходить, що коефіцієнт зміни масштабу k дорівнює крутості функції ГЧЗ лінії. Отже, в залежності від значення цієї крутості можна одержувати як розширення (експандування), так і стискання (компресію) спектра при відповідній зміні його рівня за формулою / 2 . Для підтвердження цього принципу із приведених графіків, одержаних у Maеhcad наглядно видно відмічені особливості перетворення Фур'є на прикладі НЧ ДЛЗ п'ятнадцятого порядку і функції діяння яка має комплексну спектральну функцію f (t ) exp( dt ) sin( t ) , 10 15 20 25 30 35 40 45 50 F() 2 . (b j) 2 2 Так з графіків фіг. 3 видно, що функція f (t ) і модуль комплексної спектральної функції F() є практично фінітною функцією на інтервалі T 10m при коефіцієнті масштабування m 1, де число 10 представляє нормований інтервал частот таблиці [Туник В.Ф. Пристрій табульованих секцій дисперсійних ліній затримки нижчих частот на фазових контурах. Патент на корисну модель №72061 від 10.08.2012, Бюл. № 15]. Розгортка по горизонтальній осі графіків фіг 4 та фіг. 5 вибрана такою, при якій зовнішньо ці графіки приблизно подібні графіку функції F() фіг. 3. Порівняння чисельних відміток на горизонтальній осі графіка функції F() фіг. 3 і графіків фіг. 4 та фіг. 5 вказує на відповідний результат частотного компандування, що дозволяє виміряти значення цього результату. Так, наприклад, при коефіцієнті масштабування m 0.5 із графіка фіг. 4 видно, що одержується компресія частотного діапазону приблизно від 0 до 2.5 рад/с, тобто приблизно в 4 рази. І це є наслідком того, що крутизна функції ГВЗ має значення 3.831, що значно більше, чим 0.958 при m 1. При коефіцієнті масштабування m 1.5 на виході ДЛЗ 7 фіг. 2, згідно з Фіг. 3 одержується частотний діапазон від 0 до 26 рад/с при значно зі зменшеної крутизною 0,426 , чим при коефіцієнті m 1. Аналогічно можна виміряти частотну смугу викиду спектральної функції фіг. 4 та фіг. 5 і зміну амплітуди цього викиду. Таким чином, дійсно на виході окремої ДЛЗ можна одержати необхідне значення частотної компресії фінітних ПЧ функцій при коефіцієнті масштабування m 1 і частотного експандування при m 1. З виходу ДЛЗ 2 фіг. 1 одержаний компресійний сигнал надходить на вхід фільтра ФПЧ 3, з його виходу сигнал надходить на вхід односмугового модулятора ОМ 4 фіг. 1, з виходу якого сигнал передається по певному каналу зв'язку згідно з його амплітудно-частотною характеристикою. Прийнятий сигнал надходить на вхід односмугового демодулятора ОД 5 фіг. 2, на виході якого одержується встановлений компресійний сигнал, який надходить на вхід частотного експандера з послідовно з'єднаними ЧМ 6 та ДЛЗ 7, на виході якої одержується встановлення сигналу напругою u1 . Таким чином, можна стверджувати, що запропонований пристрій дійсно у принципі і реально дозволяє вирішувати проблемну задачу телекерування фізичними об'єктами з дисперсійночастотним компандуванням фінітних НЧ сигналів при підвищенні перешкодостійкості їх, що саме і визначає практичну корисність упровадження його у науку і техніку. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Пристрій для телекерування об'єктами з дисперсійно-частотним компандуванням фінітних низькочастотних сигналів, що на передавальній стороні містить дисперсійну лінію затримки (ДЛЗ) певного порядку, функція групового часу затримки (ГЧЗ) якої має певне значення крутості а, який відрізняється тим, що ця ДЛЗ є низкочастотною (НЧ) лінією, на вході якої введено частотний модулятор (ЧМ), на її виході - фільтр нижніх частот (ФНЧ), на виході якого введено односмуговий модулятор (ОМ), на приймальній стороні пристрою введено послідовно з'єднані 2 UA 90835 U односмуговий демодулятор (ОД), другі ЧМ та НЧ ДЛЗ, яка має однаковий порядок з першою ДЛЗ і зменшене значення крутості функції ГЧЗ, при цьому обидва ЧМ модулюють вхідний сигнал за принципом множення його на вираз exp[ j( t н / 2 / 2 )] , у якому tн є значення функції ГЧЗ, яке відповідає частоті н 0 . 5 10 15 3 UA 90835 U Комп’ютерна верстка М. Ломалова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюTunyk Volodymyr Fedotovych
Автори російськоюТуник Владимир Федотович
МПК / Мітки
МПК: G05B 13/00
Мітки: сигналів, телекерування, фінітних, компандуванням, об'єктами, пристрій, низькочастотних, дисперсійно-частотним
Код посилання
<a href="https://ua.patents.su/6-90835-pristrijj-dlya-telekeruvannya-obehktami-z-dispersijjno-chastotnim-kompanduvannyam-finitnikh-nizkochastotnikh-signaliv.html" target="_blank" rel="follow" title="База патентів України">Пристрій для телекерування об’єктами з дисперсійно-частотним компандуванням фінітних низькочастотних сигналів</a>
Пристрій для телекерування об’єктами з дисперсійно-частотним компандуванням фінітних сигналів
Номер патенту: 89391
Опубліковано: 25.04.2014
Автор: Туник Володимир Федотович
МПК: G05B 13/00
Мітки: телекерування, сигналів, дисперсійно-частотним, пристрій, фінітних, об'єктами, компандуванням
Формула / Реферат:
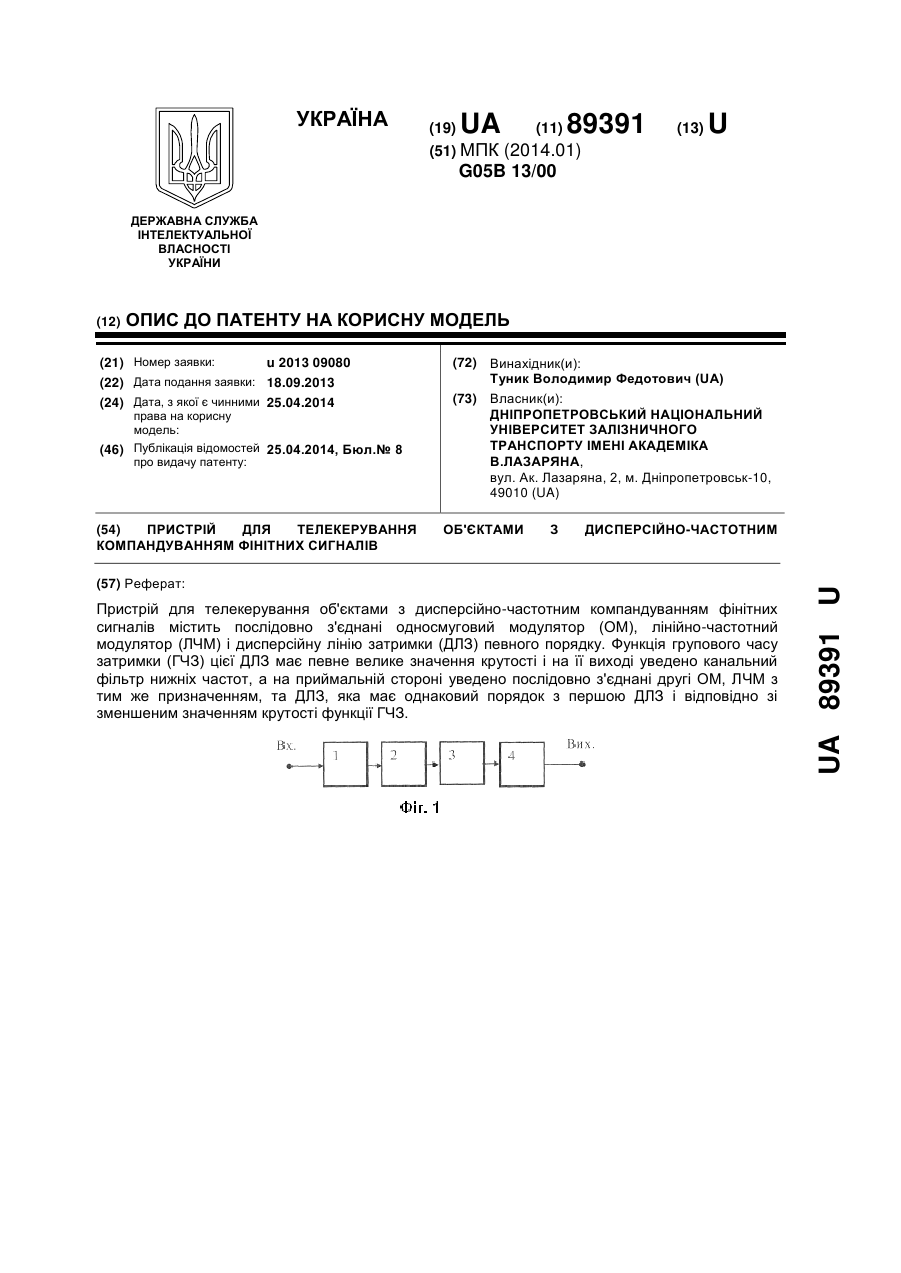
Пристрій для телекерування об'єктами з дисперсійно-частотним компандуванням фінітних сигналів, який на передавальній стороні містить послідовно з'єднані односмуговий модулятор (ОМ), лінійно-частотний модулятор (ЛЧМ) і дисперсійну лінію затримки (ДЛЗ) певного порядку, який відрізняється тим, що функція групового часу затримки(ГЧЗ) цієї ДЛЗ має певне велике значення крутості і на її виході уведено канальний фільтр нижніх частот, а на...
Пристрій для точного аналізу спектра низькочастотних сигналів реальними дисперсійними лініями затримки
Номер патенту: 88648
Опубліковано: 25.03.2014
Автор: Туник Володимир Федотович
МПК: G01R 23/16
Мітки: затримки, точного, реальними, аналізу, спектра, лініями, пристрій, дисперсійними, низькочастотних, сигналів
Формула / Реферат:
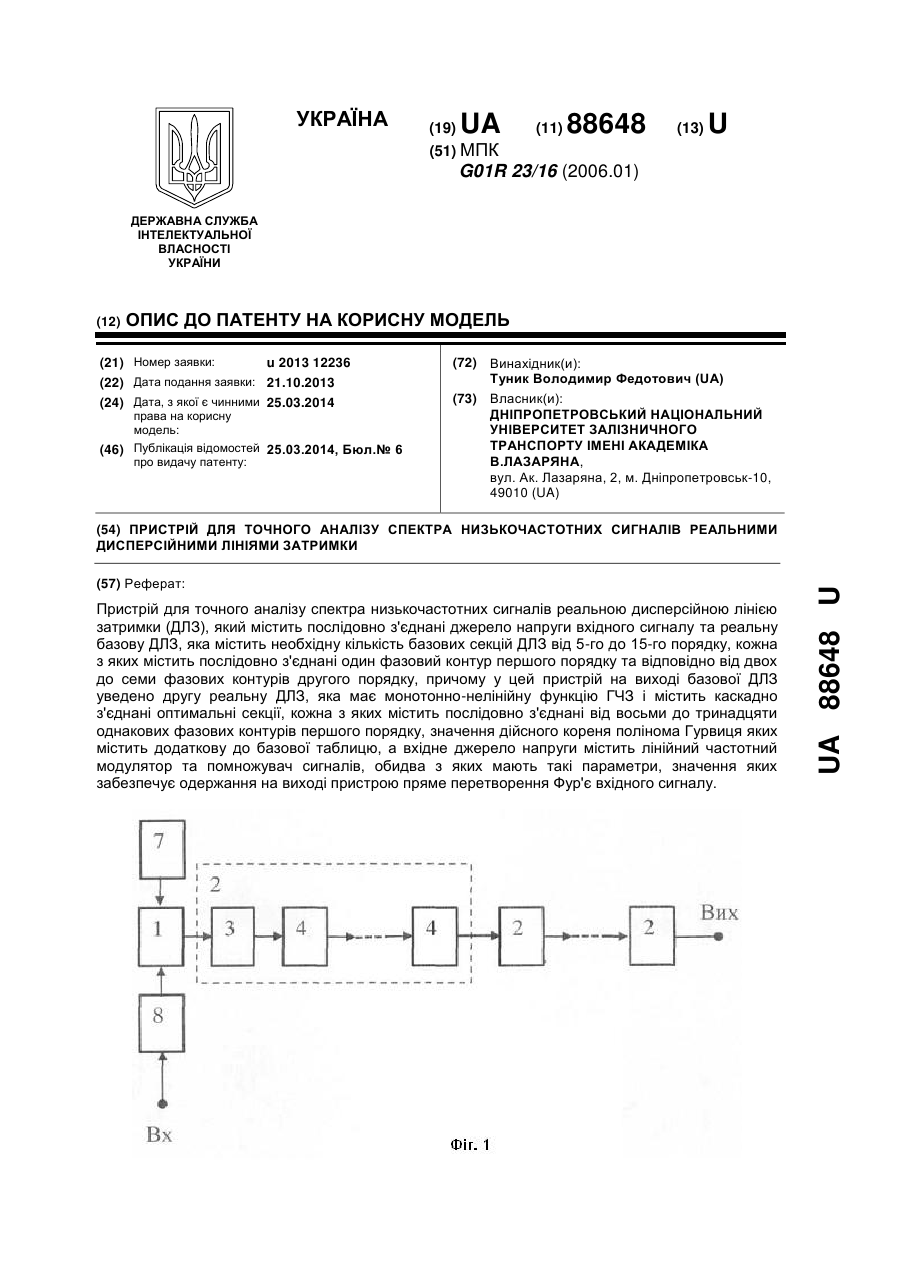
Пристрій для точного аналізу спектра низькочастотних сигналів реальною дисперсійною лінією затримки (ДЛЗ), який містить послідовно з'єднані джерело напруги вхідного сигналу та реальну базову ДЛЗ, яка містить необхідну кількість базових секцій ДЛЗ від 5-го до 15-го порядку, кожна з яких містить послідовно з'єднані один фазовий контур першого порядку та відповідно від двох до семи фазових контурів другого порядку, який відрізняється тим, що у...
Пристрій для аналізу спектра низькочастотних сигналів реально оптимальною дисперсійною лінією затримки
Номер патенту: 88514
Опубліковано: 25.03.2014
Автор: Туник Володимир Федотович
МПК: G01R 23/16
Мітки: лінією, спектра, низькочастотних, затримки, реальної, аналізу, сигналів, пристрій, дисперсійною, оптимальною
Формула / Реферат:
Пристрій для аналізу спектра низькочастотних сигналів реально оптимальною дисперсійною лінією затримки (ДЛЗ), який містить необхідну кількість каскадно з'єднаних базових секцій ДЛЗ від 5-го до 15-го порядку, кожна з яких містить послідовно з'єднані один фазовий контур першого порядку та відповідно від двох до семи фазових контурів другого порядку, який відрізняється тим, що на виході базової ДЛЗ уведено каскадно з'єднану другу реальну ДЛЗ з...
Пристрій для дисперсійного аналізу спектра низькочастотних сигналів лінією на фазових контурах
Номер патенту: 65227
Опубліковано: 25.11.2011
Автор: Туник Володимир Федотович
МПК: G01R 23/16
Мітки: контурах, дисперсійного, аналізу, фазових, пристрій, низькочастотних, сигналів, спектра, лінією
Формула / Реферат:
Пристрій для дисперсійного аналізу спектра низькочастотних сигналів лінією на фазових контурах, що містить послідовно з'єднані дисперсійну лінію затримки (ДЛЗ) та осцилограф, на вході розгортки якого знаходиться синхронізатор, вхід якого з'єднано зі входом ДЛЗ, функція групового часу затримки (ГЧЗ), яка у першому та другому варіантах є лінійною, а у третьому варіанті вона монотонно-нелінійна і між ДЛЗ та осцилографом цього варіанта...
Спосіб моделювання дисперсійних аналізаторів спектра низькочастотних сигналів
Номер патенту: 87776
Опубліковано: 25.02.2014
Автор: Туник Володимир Федотович
МПК: G06G 7/00
Мітки: сигналів, спосіб, аналізаторів, моделювання, низькочастотних, дисперсійних, спектра
Формула / Реферат:
Спосіб моделювання дисперсійних аналізаторів спектра низькочастотних (НЧ) сигналів, який містить аналізатор ефективного спектра та аналізатор активного спектра зі встановленням ефективного спектра корелометром, дисперсійна лінія затримки (ДЛЗ) обох аналізаторів має лінійну функцію групового часу затримки (ГЧЗ), моделювання якої виконано в Mathcad, де одержана таблиця параметрів і нулів поліномів Гурвиця секцій цих ДЛЗ, кожна з яких має один...
Попередній патент: Дискове гальмо
Наступний патент: Адаптивне тональне рейкове коло
Випадковий патент: Технологічна рідина для абразивної обробки композиційних метало- та мінералокерамічних матеріалів