Спосіб контролю роботи прес-підбирача та прес-підбирач
Формула / Реферат
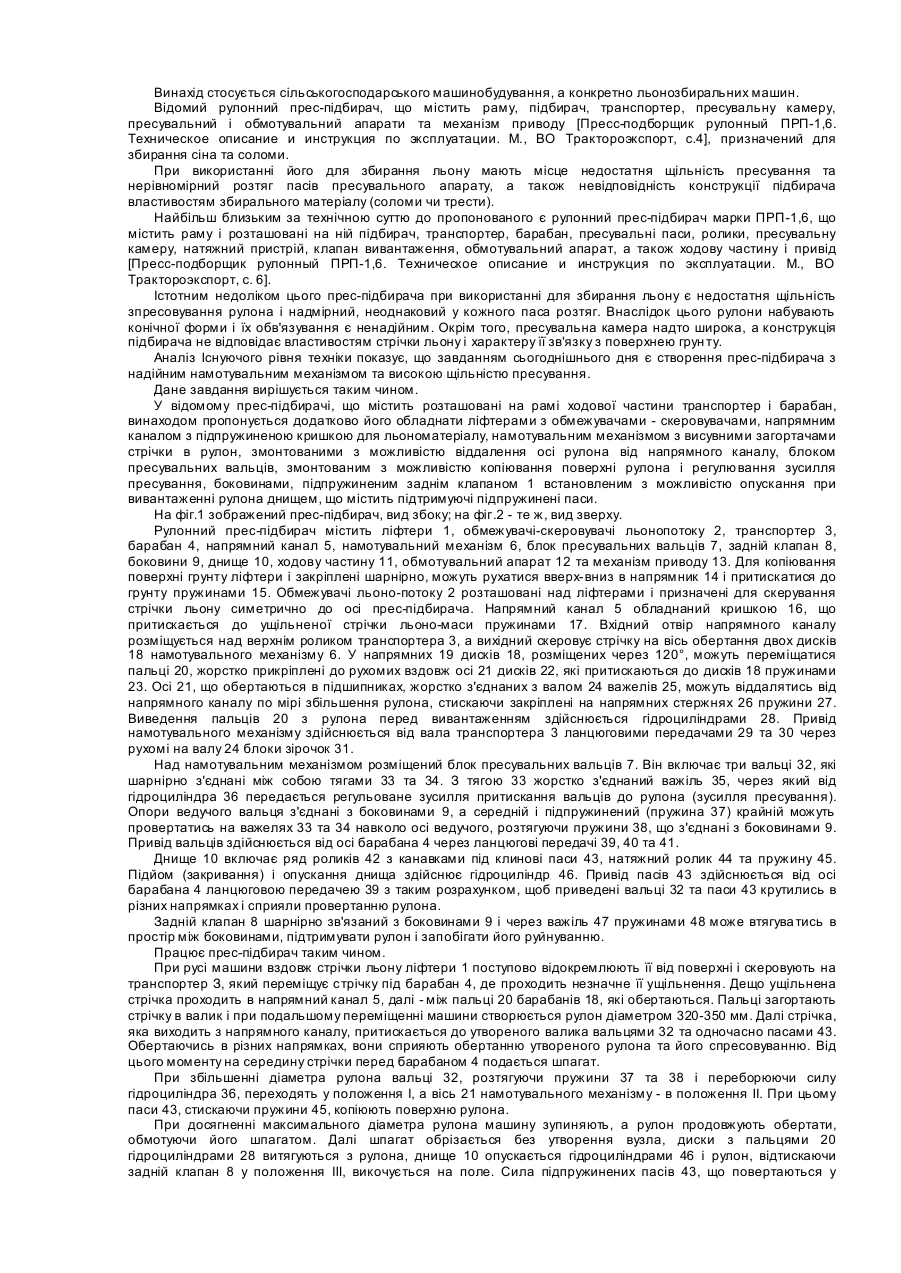
1. Спосіб контролю роботи прес-підбирача під час підбирання рядків скошеної сільськогосподарської культури, причому прес-підбирач включає пристрій для підбирання, котрий підбирає скошену культуру, після чого сільськогосподарська культура подається до пресувального пристрою, який пресує останню у напрямку пресування з утворенням тюка, пресувальний пристрій включає засоби для вимірювання розподілу ступеня завантаження впоперек до напрямку пресування, який відрізняється тим, що профіль рядка сільськогосподарської культури перед пристроєм для підбирання визначається з використанням тривимірної технології формування зображень, що даний профіль аналізується для визначення розподілу висоти у поперечному напрямку рядка сільськогосподарської культури, що прес-підбирач контролюється у такий спосіб, що пристрій для підбирання розміщується в поперечному напрямку відносно розподілу висот, та що положення підбирача регулюється в залежності від визначеного розподілу ступеня завантаження.
2. Спосіб за п. 1, який відрізняється тим, що завантаження прес-підбирача сільськогосподарською культурою оцінюється шляхом сумування визначених розподілів висоти та їх положень у напрямку ширини пресувального пристрою в результаті контролю, та що положення підбирача регулюється в залежності від оціненого завантаження.
3. Спосіб за п. 1 або 2, в якому прес-підбирач буксирується за трактором, який відрізняється тим, що положення прес-підбирача контролюється щодо трактора впоперек до напрямку руху, і керування трактором здійснюється таким чином, що він розташовується по центру відносно рядка сільськогосподарської культури.
4. Спосіб за будь-яким із пп. 1-3, в якому рухомим засобом є самохідний прес-підбирач або буксирувальний трактор, який відрізняється тим, що визначається кут між поздовжнім напрямком рядка сільськогосподарської культури та поздовжнім напрямком рухомого засобу, і також визначається зміщення між вертикальною центральною площиною рядка сільськогосподарської культури та вертикальною центральною площиною рухомого засобу, та що вищезазначені кут та зміщення використовуються для керування та/або контролю.
5. Спосіб за будь-яким із пп. 1-4, який відрізняється тим, що послідовно записується ряд тривимірних зображень поля та рядка сільськогосподарської культури перед прес-підбирачем, котрі аналізуються для визначення траєкторії рядка сільськогосподарської культури на полі.
6. Спосіб за п. 5, який відрізняється тим, що аналізується кожне зображення, і характерні риси, що знайдені на зображенні, відшукуються на попередньому зображенні для визначення у такий спосіб відносних положень на полі двох зображень.
7. Прес-підбирач, що включає пристрій підбирання для підбирання рядка скошеної культури, пресувальний пристрій для пресування останньої у напрямку пресування з утворенням тюка, пресувальний пристрій, що включає засоби для вимірювання розподілу ступеня завантаження впоперек до напрямку пресування, який відрізняється тим, що включає пристрій формування тривимірних зображень для запису тривимірного зображення поля та рядка сільськогосподарської культури перед прес-підбирачем, та контрольний пристрій, який включає процесор даних для контролювання прес-підбирача у залежності від даних від тривимірного зображення та ступеня завантаження.
8. Прес-підбирач за п. 7, котрий з'єднаний з буксирувальним трактором у точці приєднання, який відрізняється тим, що пристрій для формування тривимірних зображень включає електрооптичний датчик, змонтований на тракторі, та що приєднувальна точка у контрольований спосіб може рухатись у поперечному напрямку відносно трактора та/або прес-підбирача.
Текст
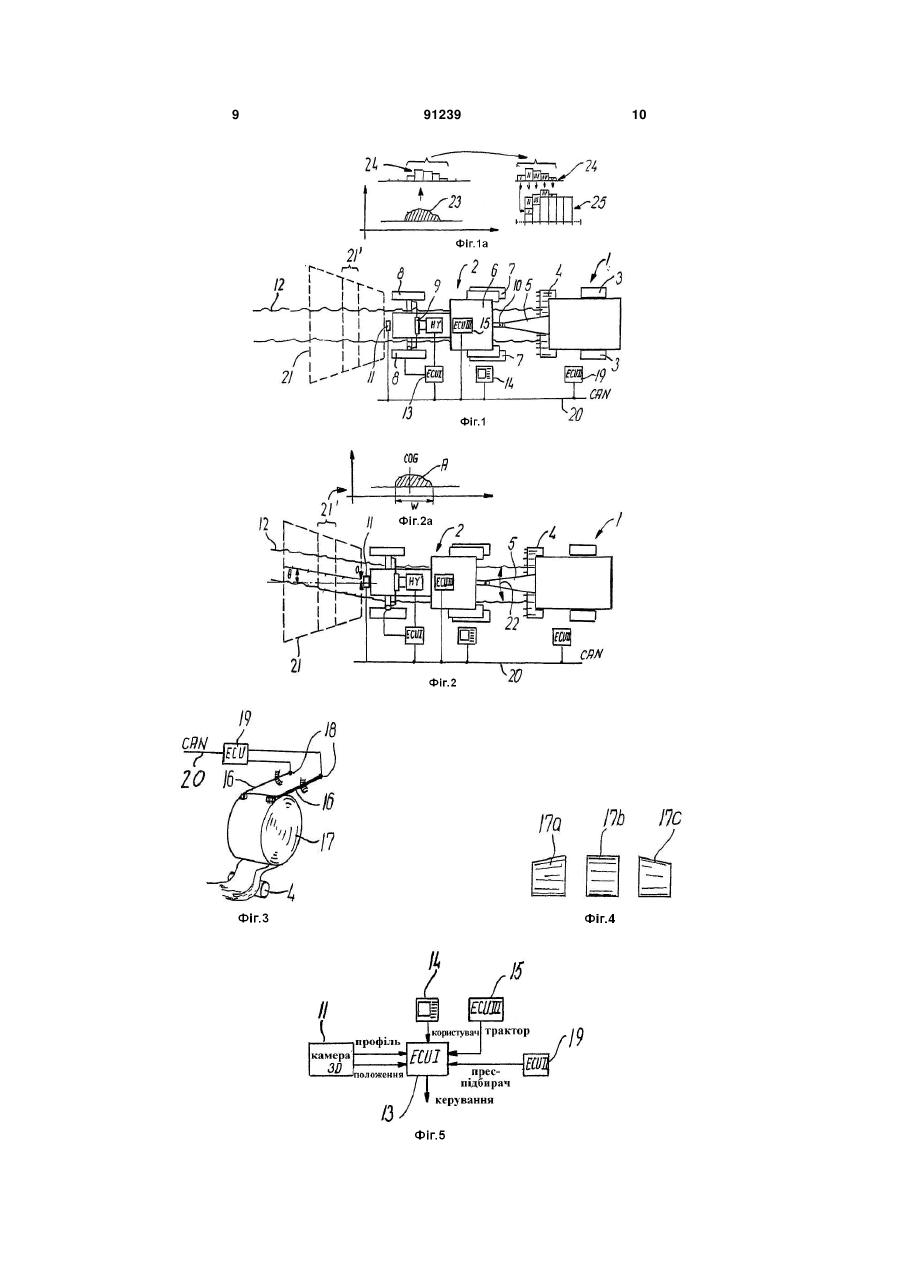
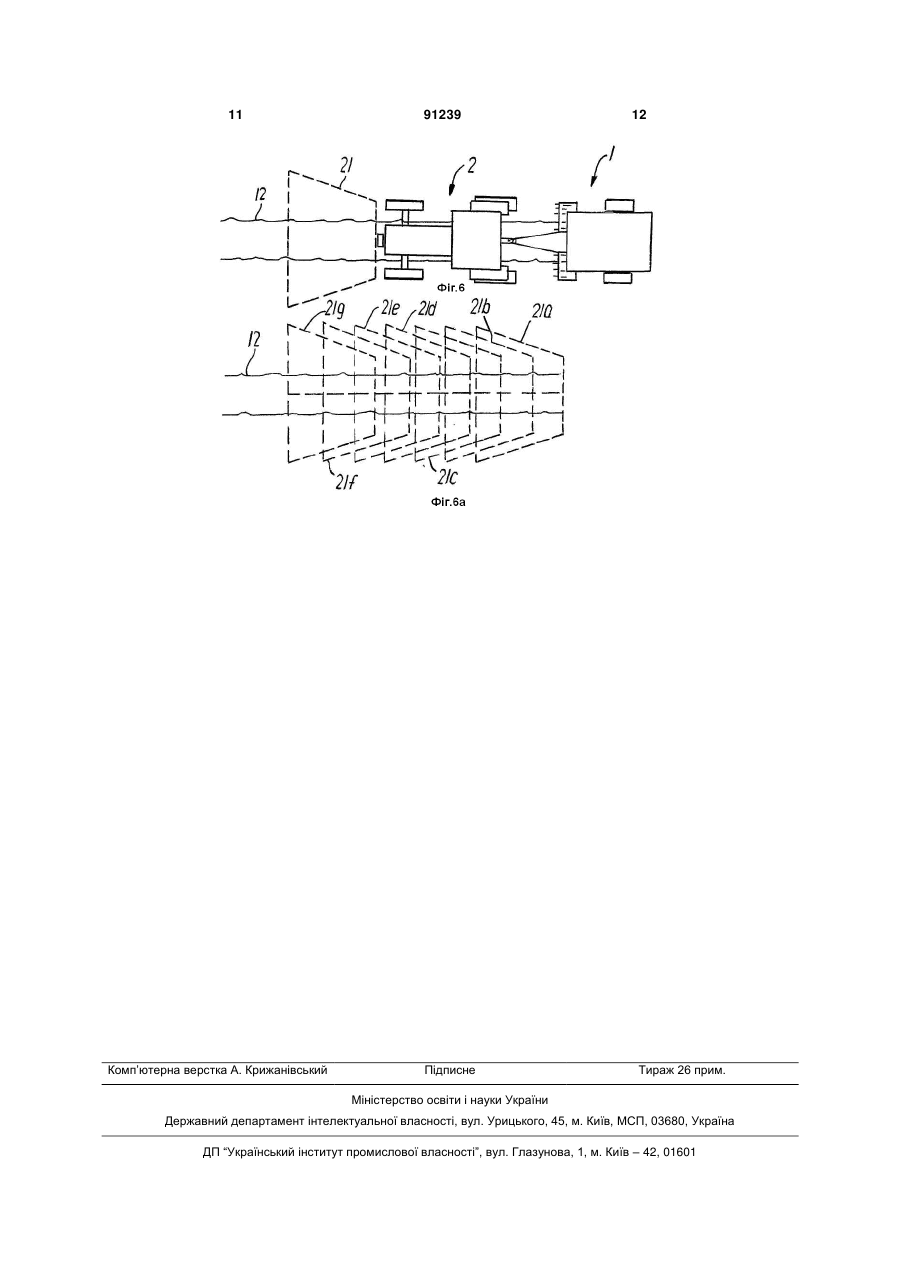
1. Спосіб контролю роботи прес-підбирача під час підбирання рядків скошеної сільськогосподарської культури, причому прес-підбирач включає пристрій для підбирання, котрий підбирає скошену культуру, після чого сільськогосподарська культура подається до пресувального пристрою, який пресує останню у напрямку пресування з утворенням тюка, пресувальний пристрій включає засоби для вимірювання розподілу ступеня завантаження впоперек до напрямку пресування, який відрізняється тим, що профіль рядка сільськогосподарської культури перед пристроєм для підбирання визначається з використанням тривимірної технології формування зображень, що даний профіль аналізується для визначення розподілу висоти у поперечному напрямку рядка сільськогосподарської культури, що прес-підбирач контролюється у такий спосіб, що пристрій для підбирання розміщується в поперечному напрямку відносно розподілу висот, та що положення підбирача регулюється в залежності від визначеного розподілу ступеня завантаження. 2. Спосіб за п. 1, який відрізняється тим, що завантаження прес-підбирача сільськогосподарською культурою оцінюється шляхом сумування визначених розподілів висоти та їх положень у напрямку ширини пресувального пристрою в результаті контролю, та що положення підбирача регулюється в залежності від оціненого завантаження. 3. Спосіб за п. 1 або 2, в якому прес-підбирач буксирується за трактором, який відрізняється тим, що положення прес-підбирача контролюється що 2 (19) 1 3 Даний винахід стосується способу контролю роботи прес-підбирача під час підбирання рядків скошеної сільськогосподарської культури, даний прес-підбирач включає пристрій для підбирання, котрий підбирає скошену культуру, після чого дана культура подається до пресувального пристрою, який пресує цю культуру у напрямку пресування з утворенням тюка, пресувальний пристрій включає засоби для вимірювання розподілу ступеня завантаження впоперек до напрямку пресування. Даний винахід також стосується преспідбирача, який включає пристрій підбирання для підбирання рядків скошеної культури, пресувальний пристрій для пресування сільськогосподарської культури в напрямку пресування з утворенням тюка, пресувальний пристрій включає засоби для вимірювання розподілу ступеня завантаження впоперек до напрямку пресування. Спосіб та прес-підбирач вищезазначеного типу описані в ЕР 257 614, де розкривається преспідбирач для пресування великих прямокутних або, скоріше у формі коробки, тюків сіна, соломи або іншої сільськогосподарської культури. Цей прес-підбирач відомого рівня техніки включає пристрій зі зворотно-поступним пресувальним плунжером для пресування сільськогосподарської культури в тюк. Плунжер рухається за допомогою двох плечей і має датчики, що контролюють рівномірність чи нерівномірність навантаження цих плечей, останнє слугує показником нерівномірного завантаження тюкової камери, що призведе до утворення нерівномірних тюків, і є небажаним. Результатом реєстрації нерівномірного навантаження є сигнал, що надходить через мікрокомп'ютер до оператора прес-підбирача зробити корекцію положення прес-підбирача щодо рядка сільськогосподарської культури. Цей сигнал допомагає отримати тюк з рівномірним завантаженням, проте в той самий час слугуватиме додатковим вхідним сигналом, на який водій трактора має реагувати, і, отже, цей сигнал буде фактором стресу. У DE 38 11 649 описаний спосіб рівномірного завантаження прес-підбирача, де рядок сільськогосподарської культури відстежується у механічний спосіб за допомогою пальців, що звисають перед пристроєм для підбирання прес-підбирача. Виходячи з даних спостереження, пристрій для підбирання або рядок сільськогосподарської культури контролюється таким чином, щоб досягати центрального підбирання відносно преспідбирача. Цей спосіб механічного відстеження, як стверджується, є альтернативою до способу згідно з наведеною вище публікацією ЕР 257 614, де, як стверджується, втручання для корекції положення прес-підбирача відбувається лише після того, як шкода у вигляді нерівномірного завантаження вже мала місце. Однак, спосіб згідно з DE 38 11 649 не зможе компенсувати неоднорідне завантаження, яке може мати місце, незважаючи на контроль. Механічне від стеження також означає, що воно відбувається якраз перед підбиранням 91239 4 сільськогосподарської культури, так що адекватне контрольне втручання може й не встигнути у потрібний момент часу. При пресуванні тюків важливо, щоб тюки набували потрібної форми, оскільки у багатьох випадках вони мають разом скирдуватись або загортатись у пластикову фольгу. Предметом даного винаходу є запровадження способу та прес-підбирача, які здатні за допомогою автоматичного контролю забезпечити рівномірний ступінь завантаження під час пресування, так що оператор звільняється від стресів. Згідно з даним винаходом ця мета досягається за допомогою способу, який характеризується тим, що профіль рядка сільськогосподарської культури перед пристроєм для підбирання визначається з використанням тривимірної технології формування зображень, що даний профіль аналізується для визначення розподілу висоти у поперечному напрямку рядка сільськогосподарської культури, що прес-підбирач контролюється у такий спосіб, що пристрій для підбирання розміщується у поперечному напрямку відносно розподілу висот, і що положення підбирача регулюється в залежності від визначеного розподілу ступеня завантаження. Шляхом застосування тривимірної технології формування зображень та визначення розподілу висоти профілю рядка сільськогосподарської культури можливо одержати придатний профіль та його бічне положення на полі достатньо далеко попереду прес-підбирача для здійснення придатного контрольного втручання. Під придатним мається на думці як щодо часу, так і щодо величини цього контрольного втручання. У той самий час будь-яка неточність у контролюванні, що може все таки мати місце через, наприклад, загальну неточність у рульовому керуванні або неоднорідність щільності рядка сільськогосподарської культури вздовж профілю, може бути компенсована. Це уможливлює запровадження автоматичного керування трактором, так що користувач або водій трактора звільняється від стресів, що не має місця у відомому рівні техніки, розглянутому вище. Прес-підбирач може бути будь-якого типу, такого як той, що робить тюки прямокутної форми або у формі коробки, або типу, що робить тюки круглої форми. В оптимальному варіанті втілення завантаження прес-підбирача сільськогосподарської культури оцінюється шляхом сумування визначених розподілів висоти та їх положень у напрямку ширини пресувального пристрою в результаті контролю, і положення підбирача регулюється в залежності від оціненого завантаження. Це дає більшу впевненість у рівномірному завантаженні. Якщо рядок сільськогосподарської культури вузький відносно прес-підбирача, цей спосіб може мати результатом навмисний рух ривками у напрямку поперечної горизонтальної осі, внаслідок чого сільськогосподарська культура завантажується, наприклад, навперемінно з одного та другого боку прес-підбирача. 5 В оптимальному варіанті втілення, де преспідбирач буксирується за трактором, положення прес-підбирача контролюється щодо трактора впоперек до напрямку руху, і керування трактором здійснюється таким чином, що він розташовується по центру відносно рядка сільськогосподарської культури. У такий спосіб колеса трактора не рухаються по рядку сільськогосподарської культури і не стискають його, хоча при цьому здійснюється потрібний контроль прес-підбирача. В альтернативному варіанті, і простіше, керування трактором може здійснюватись для позиціонування преспідбирача відносно рядка сільськогосподарської культури. Прес-підбирач може бути самохідним або може буксируватись трактором. В оптимальному варіанті втілення, де рухомим засобом є самохідний прес-підбирач або буксирувальний трактор, визначається кут між поздовжнім напрямком рядка сільськогосподарської культури та поздовжнім напрямком рухомого засобу, і також визначається зміщення між вертикальною центральною площиною рядка сільськогосподарської культури та вертикальною центральною площиною рухомого засобу, і вищезазначені кут та зміщення використовуються для керування та/або контролю. Визначення як зміщення, так і кута дає більшу передбачуваність і, отже, більшу точність контролю. У ще одному оптимальному варіанті втілення послідовно записується ряд тривимірних зображень поля та рядка сільськогосподарської культури перед прес-підбирачем, котрі аналізуються для визначення траєкторії рядка сільськогосподарської культури на полі. В оптимальному варіанті аналізується кожне зображення, і характерні риси, що знайдені на даному зображенні, відшукуються на попередньому зображенні для визначення у такий спосіб відносних положень на полі даних двох зображень. В альтернативному варіанті або на як доповнення використовуються гіроскопічні, GPS (глобальна система позиціонування) та/або одометричні засоби для визначення зміни положення та орієнтації рухомого засобу і камери між двома зображеннями, наприклад, зображеннями n та n+1, з метою визначення відносних положень на полі цих двох зображень. У такий спосіб контроль прес-підбирача може ураховувати будь-яку кривизну траєкторії рядка сільськогосподарської культури на полі. Крім того, він робить можливим керувати прес-підбирачем навіть на ділянках з уклоном, де трактор та прес-підбирач знаходитимуться під кутом до напрямку руху через силу тяжіння. Мета даного винаходу також досягається за допомогою прес-підбирача типу, який зазначався у введенні, де прес-підбирач характеризується тим, що включає пристрій для формування тривимірних зображень для запису тривимірного зображення поля та рядка сільськогосподарської культури перед прес-підбирачем, та контрольний пристрій, який включає процесор даних для контролю преспідбирача в залежності від даних від тривимірного зображення та ступеня завантаження. Такий преспідбирач може використовуватися для застосування способу згідно з даним винаходом. Прес 91239 6 підбирач може бути самохідним або може буксируватись трактором. В останньому випадку пристрій для формування тривимірних зображень розміщують в оптимальному варіанті на тракторі для запису зображення поля перед трактором. Як зазначалося в описі способу згідно з даним винаходом, прес-підбирач може бути будь-якого типу. Пристрій для формування тривимірних зображень є пристроєм з електрооптичним датчиком та обладнанням для обробки зображень, і він може забезпечувати попіксельне зображення з даними по глибині, тобто даними на відстані від спостережуваної точки до камери, для принаймні деяких пікселів. Так, пристрій для формування тривимірних зображень може бути стереокамерою з процесором обробки сигналу, тобто однією або двома камерами, що дають два зміщених зображення, за якими процесор обробки сигналу видає дані по глибині, виходячи з відмінностей зображень, наприклад, шляхом тріангуляції. Іншою можливістю є те, що пристрій для формування тривимірних зображень оснований на часопролітному принципі, де емітується світловий імпульс, і вимірюється час прибуття відбитого сигналу у відповідних пікселях у камері, забезпечуючи дані по глибині. Тепер даний винахід буде описаний нижче більш детально за допомогою прикладу одного із варіантів та з посиланням на схематичні креслення, на яких Фіг.1 являє собою вигляд зверху преспідбирача, що буксирується трактором під час підбирання рядка сільськогосподарської культури, Фіг.1а зображує профіль рядка сільськогосподарської культури, Фіг.2 являє собою вигляд зверху, який відповідає вигляду Фіг.1, але зображує підбирання викривленого рядка сільськогосподарської культури, Фіг.2а зображує профіль рядка сільськогосподарської культури, Фіг.3 ілюструє вимірювання ступеня завантаження тюка по ширині, Фіг.4 зображує приклади профілів тюків, Фіг.5 ілюструє контрольну систему, і Фіг.6 та 6а ілюструють сполучення кількох зображень для створення карти. Фіг.1, 2 та 6 зображують прес-підбирач 1, сполучений з буксирувальним трактором 2. Преспідбирач 1 має колеса 3, підбирач 4, язик 5 та прес-камеру, що детально не показана. Трактор 2 має кабіну оператора 6, задні колеса 7. передні колеса 8, що повертаються за допомогою гідроциліндра 9, та приєднувальний пристрій 10 для приєднування язика 5 прес-підбирача. Безпосередньо попереду трактора змонтований пристрій для формування тривимірних зображень у формі стереокамери 11, яка включає процесор обробки сигналу. Стереокамера 11 записує зображення рядка сільськогосподарської культури 12 сіно / солома / трава перед трактором. Трактор 2 обладнаний засобом електрогідравлічного контролю з процесором 13, гідроциліндром 9 та терміналом 14 з монітором для зв'язку з користувачем. Трактор має ще один процесор 15 для контролю та моніторингу різних функцій трактора, 7 таких як захисні функції, та датчиків, таких як, наприклад, вимірювання швидкості і положення коліс. Прес-підбирач 1 обладнаний засобами для вимірювання розподілу ступеня завантаження впоперек напрямку пресування у формі індикатора (Фіг.3), котрий може вимірювати нестачу матеріалу в тюку з одного із боків або, можливо, у кількох точках упоперек тюка. Такий індикатор зображений з двома плечима 16, одні кінці яких спираються на тюк 17 (у цьому випадку круглий тюк), і обертання яких навколо точок з'єднання 18 вимірюється. Процесор 19 піддає моніторингу величини обертання плечей 16 і, особливо, відмінності у таких обертаннях, що вказує на нерівномірний ступінь завантаження. На Фігурі 4 зображені три токи 17а, 17b, 17с, котрі неоднорідні з одного боку, однорідні та неоднорідні з другого боку, відповідно, неоднорідні тюки мають нестачу матеріалу з лівого та правого боків, відповідно, в результаті нерівномірного завантаження уздовж їх ширини, тобто упоперек до напрямку пресування. Усі датчики, процесори та ECU (електронні контрольні блоки) 3, 15, 19 і камера 11 безпосередньо або у непрямий спосіб з'єднані через мережу CAN 20 для забезпечення зв'язку між цими блоками. Спосіб роботи описаного таким чином апарату тепер буде описаний з посиланням на Фіг.2. Стереокамера 11 записує зображення 21 рядка сільськогосподарської культури 12 сіна/соломи/трави від приблизно їм до 6м перед трактором 2 та аналізує зображення 21. Результат, що називається "положення", полягає у знаходженні положення рядка сільськогосподарської культури відносно трактора. Це положення характеризується зміщенням або зсувом О та кутом до середини рядка сільськогосподарської культури або валка 12. Ці дані є основними даними для скеровування трактора 2 та прес-підбирача 1 у положення прямо над валком 12. Для забезпечення контролю завантаження прес-підбирача 1 профіль валка 12 (Фіг.1а) безперервно аналізується з визначенням площі поперечного перерізу А, ширини W та центру ваги COG, так що матеріал сільськогосподарської культури може бути рівномірно розподілений по ширині пресувальної камери. Результат профільного аналізу, "профіль", використовується для скеровування трактора та прес-підбирача в той чи інший бік відносно оптимальної траєкторії руху, основаної на "положенні". На початку пресування тюка застосовується контроль за розімкненим циклом, що базується на результатах профільних аналізів, "профілів". На деякій стадії індикатор (Фіг.3) прес-підбирача 1 розпочинає, у залежності від умов, сигналізувати, що з одного із боків тюка 17 недостатньо матеріалу. Ця інформація буде застосована разом з "положенням" та "профілем" для контролю за замкненим циклом і регулювання кількості матеріалу з одного із боків. Коли індикатор прес-підбирача 1 сигналізує, що тюк однорідний (як тюк 17b), знову 91239 8 розпочнеться контроль за розімкненим циклом, що базується на даних із "профілю". У ще одному варіанті втілення трактор 2 спрямовується прямо над валком 12 або у ручний спосіб або автоматично на основі зображення 21 із камери 11 та під контролем електрогідравлічної системи. Для оптимального завантаження преспідбирача 1 прес-підбирач зміщується у той чи інший бік відносно трактора. Це може досягатись, наприклад, якщо язик 5 прес-підбирача 1 у контрольований спосіб може коливатись з боку в бік, як показано подвійною стрілкою 22, наприклад, за допомогою гідроциліндра, не показаний, або якщо приєднувальний пристрій 10 трактора 2 у контрольований спосіб може рухатися з боку в бік. Обробка зображення для визначення "положення" може полягати в аналізі комбінації даних по висоті, кольору та/або текстурі. Перший крок полягає у розрізненні матеріалу (такого як сіно, солома, трава і т.д.) та фону. Другий крок полягає у проведенні лінії через середину даного матеріалу та визначенні звідси кута та зсуву О валка 12 відносно трактора 2. У зв'язку з визначенням зсуву О та кута визначаються також кінець валка 12 та різні перешкоди і неоднорідності, котрі можуть дати попереджувальний сигнал користувачу або видати сигнал на зупинку трактора. Обробка зображення для визначення "профілю" може полягати у безперервному аналізі всього зображення або секції 2 Γ зображення 21 (Фіг.1а та 2а) упоперек валка 12. Профіль 23 у секції 21' апроксимується за допомогою ряду стовпчиків 24 з придатним розділенням. При відповідному придатному розділенні по ширині тюка 17 вклади від кожного профільного аналізу сумуються до оціненого завантаження 25 і визначається, куди матеріал сільськогосподарської культури на своєму шляху до прес-підбирача та з апроксимованим профілем 24 повинен поміщуватися для одержання (безперервного) рівномірного розподілу сумованих вкладів у розподіл матеріалу сільськогосподарської культури, тобто (безперервного) рівномірного оціненого завантаження 25. Для визначення того, яким чином матеріал урожаю надходить у прес-підбирач 1, якщо валок 12 не зовсім прямий, результати від зображення до зображення 21а, 21b ... 21g можуть об'єднуватись разом у карту по довжині трактора 2 та преспідбирача 1. Аналіз цієї карти дозволяє розрахувати, де знаходиться валок 12 відносно підбирача 4 прес-підбирача 1, навіть при рухові по кривим. Для визначення положення прес-підбирача 1 відносно трактора 2 на похилій ділянці та за інших важких умов може виникнути потреба безперервно вимірювати кут між відповідними поздовжніми центральними площинами трактора 2 та преспідбирача 1. Якщо трактор 2 або прес-підбирач 1 оснащені обладнанням GPS, можливо безперервно накопичувати дані про площини поперечного перерізу валка разом з положенням GPS і створювати у такий спосіб карту для даного поля. 9 91239 10 11 Комп’ютерна верстка А. Крижанівський 91239 Підписне 12 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for controlling operation of pickup baler and pickup baler
Автори англійськоюMADSEN TOMMY ERTBOLLE
Назва патенту російськоюСпособ контроля работы пресс-подборщика и пресс-подборщик
Автори російськоюМадсен Томми Эртбёлле
МПК / Мітки
МПК: A01F 15/00
Мітки: прес-підбирач, роботи, спосіб, прес-підбирача, контролю
Код посилання
<a href="https://ua.patents.su/6-91239-sposib-kontrolyu-roboti-pres-pidbiracha-ta-pres-pidbirach.html" target="_blank" rel="follow" title="База патентів України">Спосіб контролю роботи прес-підбирача та прес-підбирач</a>
Рулонний прес-підбирач
Номер патенту: 21787
Опубліковано: 30.04.1998
Автори: Хайліс Гедаль Абрамович, Пахолюк Орест Андрійович, Божидарник Віктор Володимирович, Мандзик Петро Іванович
МПК: A01D 45/06
Мітки: прес-підбирач, рулонний
Формула / Реферат:
Рулонний прес-підбирач, який містить підбирач І розташовані на рамі транспортер, барабан, пресувальні паси, ролики, пресувальну камеру, натяжний пристрій, клапан вивантаження, обмотувальний апарат, а також ходову частину і привід, який відрізняється тим, що прес-підбирач додатково обладнаний трьома секціями підпресо-вувальних апаратів, причому три каретки кожного апарату встановлені на підпружиненій на кінцях єдиній осі, що встановлена з...
Рулонний прес-підбирач
Номер патенту: 60631
Опубліковано: 15.10.2003
Автори: Юхимчук Сергій Федорович, Нескромнюк Віктор Павлович, Клубук Наталія Олександрівна, Толстушко Микола Миколайович
МПК: A01D 45/06
Мітки: рулонний, прес-підбирач
Формула / Реферат:
Рулонний прес-підбирач, що містить раму і розташовані на ній підбирач, барабан, пресувальні паси, ролики, натяжний пристрій, клапан вивантаження, обмотувальний апарат, а також ходову частину і механізм приводу, який відрізняється тим, що барабан шарнірно з'єднаний з двома однаковими, симетрично встановленими на рамі кривошипно-коромисловими механізмами, кожен з яких з'єднаний із вихідним валом редуктора механізму приводу, а редуктор виконаний...
Рулонний прес-підбирач
Номер патенту: 21295
Опубліковано: 04.11.1997
Автори: Пахолюк Орест Андрійович, Пахолюк Андрій Пантелійович, Хайліс Гедаль Абрамович
МПК: A01D 45/06
Мітки: рулонний, прес-підбирач
Формула / Реферат:
Рулонний прес-підбирач, що містить підбирач і розташовані на рамі транспортер, барабан, пресувальні паси, ролики, пресувальну камеру, натяжний пристрій, клапан вивантаження, обмотувальний апарат, а також ходову частину і привід, який відрізняється тим, що він додатково обладнаний закріпленими в передній, верхній та задніх частинах зовнішнього боку внутрішніх стінок по обидва боки пресувальної камери трьома секціями підпресовувальних апаратів,...
Підбирач стрічки льону з пасовим притискаючим пристроєм
Номер патенту: 46054
Опубліковано: 10.12.2009
Автори: Шовкомуд Олександр Володимирович, Налобіна Олена Олександрівна, Хайліс Гедаль Абрамович
МПК: A01D 45/06
Мітки: пасовим, підбирач, притискаючим, льону, пристроєм, стрічки
Формула / Реферат:
Підбирач стрічки льону з пасовим притискаючим пристроєм, що містить раму транспортера, ведучий шків, ведений шків та пас із пальцями, який відрізняється тим, що до рами транспортера прикріплено притискаючий пристрій, який складається з рами притискаючого пристрою, ведучого шківа притискаючого пристрою, веденого шківа притискаючого пристрою та паса притискаючого пристрою, і який прикріплений до рами транспортера болтовим з'єднанням з...
Платформа-підбирач
Номер патенту: 2254
Опубліковано: 15.01.2004
Автори: Кондаков Леонід Андрійович, Біляєва Тетяна Миколаївна, Чукін Борис Андрійович, Каторайчик Інна Борисівна, Лупирь Валерій Федорович, Стасенко Віталій Олександрович, Полякова Олена Віталіївна, Швецов Сергій Олександрович, Кокоулін Едуард Михайлович, Романов Олександр Андрійович
МПК: A01D 89/00
Мітки: платформа-підбирач
Формула / Реферат:
Платформа-підбирач, що містить корпус, шнек, транспортер з граблинами і привід, яка відрізняється тим, що корпус має стикувальну площину, виконану із нахилом 5...10о від вертикальної площини у бік комбайна, козирок і вертикальні ребра із симетрично розташованими в них направляючими трубками, в яких установлені з можливістю переміщення дві пари штирів-фіксаторів, у козирку виконані отвори для захоплення, а привід обладнаний карданним...
Попередній патент: Сцинтиляційний матеріал, детектор та пет сканер, які його містять
Наступний патент: Барабанний грохот
Випадковий патент: Корпус букси для колісних пар вантажного вагона