Спосіб неперервного контролю стану електричних кіл керування виконавчого механізму
Номер патенту: 91535
Опубліковано: 10.07.2014
Автори: Ференець Володимир Дмитрович, Назаренко Ігор Вікторович

Формула / Реферат
1. Спосіб неперервного контролю стану електричних кіл керування виконавчого механізму, який відрізняється тим, що використовується два джерела живлення різної напруги.
2. Спосіб за п. 1, який відрізняється тим, що в електричному колі керування використовуються вимірювальні резистори.
3. Спосіб за п. 1, який відрізняється тим, що використовує додаткові обмежувачі напруги, які підключені паралельно кінцевим вимикачам.
4. Спосіб за п. 1, який відрізняється тим, що використовує діоди, які підключені паралельно електричній котушці або соленоїду.
5. Спосіб за п. 1, який відрізняється тим, що використовує додаткові діоди увімкнені в прямому напрямку по одному в кожному з електричних кіл керування.
Текст
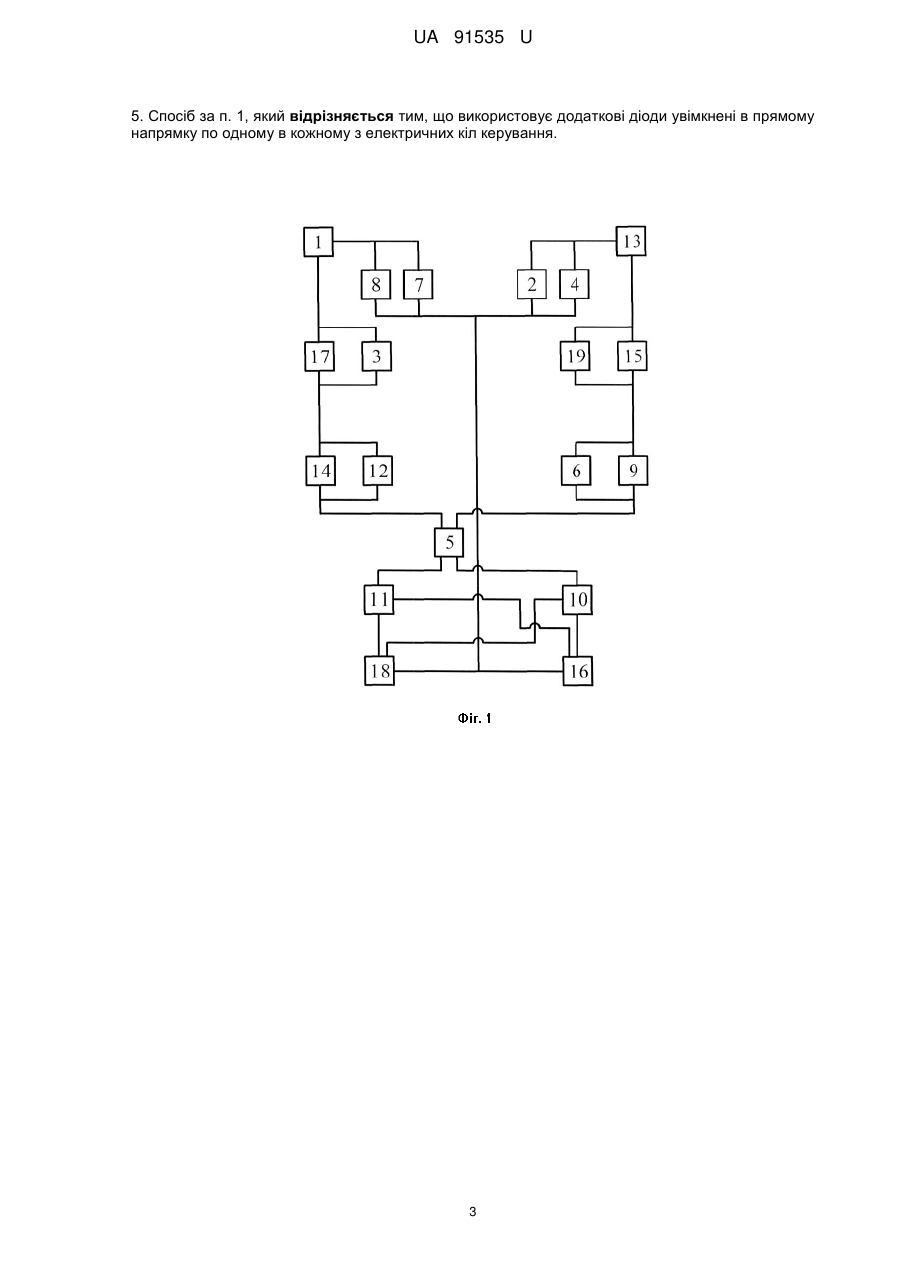
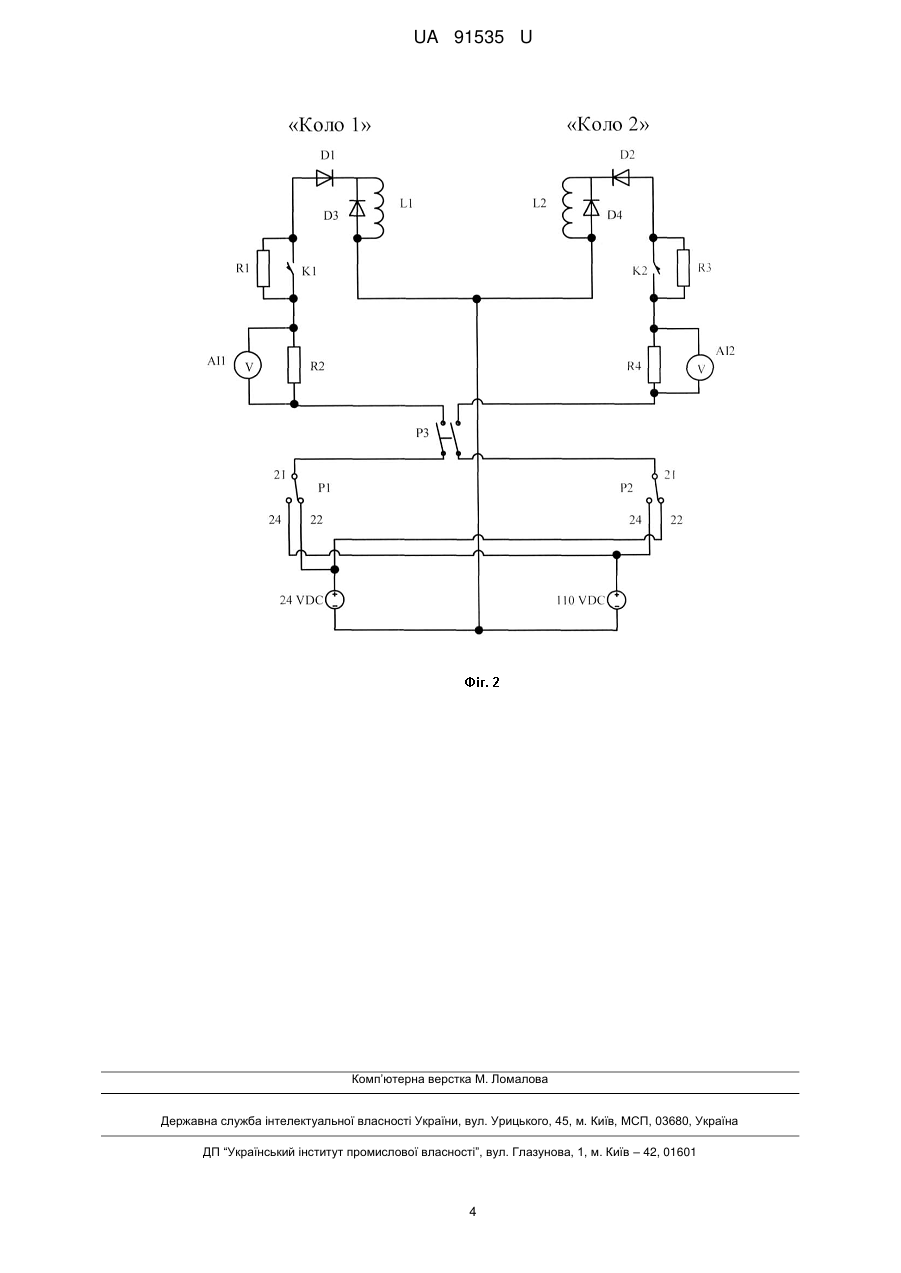
Реферат: Спосіб неперервного контролю стану електричних кіл керування виконавчого механізму. Використовується два джерела живлення різної напруги. UA 91535 U (54) СПОСІБ НЕПЕРЕРВНОГО КОНТРОЛЮ СТАНУ ЕЛЕКТРИЧНИХ КІЛ КЕРУВАННЯ ВИКОНАВЧОГО МЕХАНІЗМУ UA 91535 U UA 91535 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до способів контролю стану електричних кіл керування виконавчого механізму та може бути використана для аналізу стану електричних кіл керування виконавчого механізму та для визначення положення об'єкта керування. Найбільш близьким, за технічною суттю до способу, що заявляється, є ПРИСТРІЙ ДЛЯ КОНТРОЛЮ ЕЛЕКТРИЧНИХ КІЛ (UA №20331 МПК G01R 31/02, дата публікації 15.01.2007р.). Недоліком даного пристрою є те, що він вузькоспеціалізований і застосовується лише з розподільними пристроями КРПВ-6. Також недоліком є складна реалізація пристрою, що ускладнює його експлуатацію, обслуговування та ремонт. Відсутня можливість контролю електричних кіл керування під час роботи КРПВ-6 та одночасного контролю декількох електричних кіл. В основу корисної моделі поставлена задача створення способу, який би дозволив створити універсальне та надійне технічне рішення з більшою функціональністю, підвищеною зручністю експлуатації, технічного обслуговування та ремонту, реалізоване за допомогою стандартних модулів та елементів, що випускаються серійно. Спосіб повинен давати змогу неперервно визначати поточний стан кіл керування виконавчим механізмом, зокрема, коротке замикання, витік потенціалу на землю, обрив та норма. Також технічне рішення, реалізоване на основі запропонованого способу, повинно давати змогу здійснювати контроль електричних кіл керування будь-якого виконавчого пристрою, виконавчим механізмом якого є електрична котушка або соленоїд. Також за мету було поставлено удосконалити спосіб діагностування стану електричних кіл керування виконавчим механізмом таким чином, щоб спростити загальну конструкцію пристрою, для реалізації даного способу, та підвищити його надійність і довговічність. Однією з головних цілей була мінімізація економічних витрат на впровадження технічного рішення та його експлуатацію. Спосіб дозволяє неперервно проводити контроль стану електричних кіл керування виконавчими механізмами, які задіяні в технологічних процесах, порушення яких може нести небезпеку для життя людей, значні економічні втрати або нести значну загрозу навколишньому середовищу. Також необхідність створення даного способу в деяких випадках обумовлена вимогами діючих відомчих та державних нормативних документів. Застосування способу, що пропонується, дозволяє завчасно, до видачі команди керування виконавчому механізму, визначити несправності електричних кіл керування виконавчим механізмом та попередити хибний перебіг технологічного процесу. Спосіб дозволяє визначати кінцеві положення об'єкта керування. Неперервність контролю електричних кіл керування дозволяє проводити діагностики стану електричних кіл не лише в режимі чергування, а й під час роботи виконавчого механізму. Мінімізація економічних витрат досягається за рахунок використання існуючих кабельних ліній за трьохпровідною схемою підключення виконавчих пристроїв до керуючих пристроїв. Універсальність даного способу полягає в тому, що він дозволяє проводити контроль електричних кіл керування будь-якого виконавчого пристрою, виконавчим механізмом якого є електрична котушка або соленоїд. Конструктивні особливості даного способу дозволяють проводити контроль електричних кіл керування за будь-якої напруги керування виконавчим механізмом. Суть корисної моделі - в трипровідну схему керування виконавчим пристроєм введено додаткові електронні компоненти. Експлуатаційні переваги способу полягають в тому, що всі компоненти електричної схеми, яка реалізує даний спосіб, є стандартними та випускаються серійно. Значення параметрів, що вимірюються, приведені до стандартного ряду уніфікованих сигналів. Спосіб передбачає захист елементів схеми від негативного впливу явищ, що викликані електромагнітною індукцією в моменти зміни режиму роботи виконавчого механізму. Структурна схема технічного рішення для реалізації даного способу зображена на Фіг. 1. Структурна схема включає два джерела живлення різної напруги 18 та 16, нормально замкнуті двопозиційні реле 10, 5 та 11, модулі вимірювання напруги 12 та 6, вимірювальні резистори 14 та 9, обмежувачі напруги 17 та 15, кінцеві вимикачі 3 та 19, діоди 1, 13, 4 та 8, соленоїди або електричні котушки 7 та 2. Схема поділяється на два логічних електричних кола відносно загального проводу джерел живлення. Назвем їх "Коло 1" та "Коло 2". Спосіб передбачає два режими роботи виконавчого механізму: "Робота" та "Очікування". В режимі "Робота" виконується безпосередньо зміна положення виконавчого механізму. Відповідно в режимі "Очікування" відсутні як команда на зміну положення, так і сама зміна положення виконавчого механізму. 1 UA 91535 U 5 10 15 20 25 30 35 40 45 50 55 В режимі "Очікування" обидва логічних кола живляться струмом з джерела живлення меншої напруги. Виходячи зі значень падіння напруги на резисторах 14 та 9, виміряного модулями вимірювання напруги 12 та 6 відповідно, робиться висновок про стан електричних кіл керування виконавчим механізмом. Зміна положення кінцевих вимикачів впливає на падіння напруги на резисторах 14 та 9. Це дає змогу зробити висновок про положення об'єкта керування. Діоди 4 та 8 підключаються в оберненому напрямку та захищають елементи схеми від негативного впливу явищ електромагнітної індукції. В свою чергу діоди 1 та 13 підключені в прямому напрямку та запобігають перетіканню струму між "Колом 1" та "Колом 2". В режимі "Робота" перемикаються реле 11 або 10 і відповідне електричне коло живиться від джерела живлення більшої напруги 16, напруга якого відповідає напрузі керування виконавчого механізму. Поява більшої напруги на соленоїді відповідного електричного кола включає його в роботу, що викликає зміну положення об'єкта керування. Двопозиційне реле 5 призначене для підвищення надійності функціонування та більшої уніфікації технічного рішення. Кількість вимірювань значення падіння напруги на резисторах 14 та 9 за одиницю часу визначається характеристиками модулів вимірювання напруги. Номінальні параметри елементів схеми вибираються у відповідності до типу і характеристик виконавчих механізмів та модулів вимірювання. На Фіг. 2 зображено приклад електричної схеми, яка реалізує даний спосіб. Опишемо початкові умови. Об'єкт керування знаходиться в одному із кінцевих положень і відповідний кінцевий вимикач К1 знаходиться в розімкненому стані. Реле Р1 та Р2 живлять електричні кола керування напругою 24В від джерела живлення PS1. Реле Р3 замкнене. У зв'язку з тим, що кінцевий вимикач К1 розімкнутий, струм проходить через резистор R1, номіналом 1 кОм, і на резисторі R2, номінал якого складає 32 Ом, падіння напруги, виміряне модулем вимірювання напруги Al1, складає 0,46 В. У свою чергу, кінцевий вимикач К2 замкнутий. З цього випливає, що струм в колі "Коло 2" проходить повз резистор R3, номінал якого теж 1 кОм. Відповідно, падіння напруги на резисторі R4, номінал якого 32 Ом, складає 1,21 В. Це значення вимірюється модулем вимірювання напруги АІ2. Перед увімкненням режиму "Робота" об'єкт керування знаходиться в тому кінцевому положенні, якому відповідає розімкнутий кінцевий вимикач К1. З цього випливає, що напруга роботи, яка визначається джерелом живлення PS2, повинна подаватися в електричне коло "Коло 2". При перемиканні реле Р2 від кола "Коло 2" від'єднується напруга контролю 24В і подається напруга роботи 110В. При цьому виходячи зі зміни падіння напруги на резисторі R4, виміряному модулем АІ2, робиться висновок, що напруга в колі "Коло 2" дійсно змінилась і відповідає значенню, яке визначене попереднім калібруванням в конкретних умовах. В цей час діод D1 перешкоджає перетіканню струму в коло "Коло 1". Далі при спрацюванні соленоїда L2 об'єкт керування починає рух в напрямку іншого кінцевого положення. При цьому кінцевий вимикач К1 замикається, про що свідчить зміна падіння напруги на резисторі R2. При досягненні об'єктом керування кінцевого положення, до якого він рухався, розмикається кінцевий вимикач К2. Це відображається зміною падіння напруги на резисторі R4. Після цього напруга з котушки керування реле Р2 знімається і в коло "Коло 2" знову подається напруга контролю 24В. В моменти перемикання реле Р1 та Р2 в соленоїдах L1 та L2 відповідно виникають явища електромагнітної індукції, діоди D3 та D4 перешкоджають негативному впливу цих явиш на елементи схеми. Отже, об'єкт керування перемістився в протилежне кінцеве положення відносно початкового. При подальшому ввімкненні режиму роботи, напруга роботи повинна подаватися в коло "Коло 1" у відповідній вищезазначеному прикладу послідовності. Всі зміни стану відображаються на падінні напруги на резисторах R2 та R4 і реєструються модулями вимірювання напруги. На підставі отриманих значень робиться висновок щодо стану електричних кіл керування виконавчого механізму та положення об'єкту керування. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 1. Спосіб неперервного контролю стану електричних кіл керування виконавчого механізму, який відрізняється тим, що використовується два джерела живлення різної напруги. 2. Спосіб за п. 1, який відрізняється тим, що в електричному колі керування використовуються вимірювальні резистори. 3. Спосіб за п. 1, який відрізняється тим, що використовує додаткові обмежувачі напруги, які підключені паралельно кінцевим вимикачам. 4. Спосіб за п. 1, який відрізняється тим, що використовує діоди, які підключені паралельно електричній котушці або соленоїду. 2 UA 91535 U 5. Спосіб за п. 1, який відрізняється тим, що використовує додаткові діоди увімкнені в прямому напрямку по одному в кожному з електричних кіл керування. 3 UA 91535 U Комп’ютерна верстка М. Ломалова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01R 31/02
Мітки: неперервного, кіл, електричних, контролю, керування, стану, виконавчого, спосіб, механізму
Код посилання
<a href="https://ua.patents.su/6-91535-sposib-neperervnogo-kontrolyu-stanu-elektrichnikh-kil-keruvannya-vikonavchogo-mekhanizmu.html" target="_blank" rel="follow" title="База патентів України">Спосіб неперервного контролю стану електричних кіл керування виконавчого механізму</a>
Пристрій керування положенням виконавчого механізму з використанням сервоклапана із заморожуванням при відмові
Номер патенту: 95080
Опубліковано: 11.07.2011
Автор: Марлі Паскаль
МПК: F15B 13/043, F15B 20/00, F15B 9/03
Мітки: пристрій, відмові, положенням, заморожуванням, виконавчого, керування, сервоклапана, використанням, механізму
Формула / Реферат:
1. Пристрій керування положенням виконавчого механізму, який містить:електрично керований сервоклапан (10), який містить гідравлічний розподільник (20), що має щонайменше один подавальний отвір високого тиску (HP) щонайменше один вихід низького тиску (LP) і щонайменше два робочі отвори (U1, U2), при цьому кожний робочий отвір призначений для з'єднання з високим тиском або низьким тиском залежно від керованого положення повзуна в...
Спосіб та пристрій для керування роботою виконавчого механізму
Номер патенту: 75894
Опубліковано: 15.06.2006
Автори: Нілссон Кеннез, Андерссон Йорген, Хелмнер Андерс, Крістофферссон Ойріан
МПК: H02P 4/00, H02P 7/06, H02P 7/00
Мітки: роботою, пристрій, спосіб, керування, виконавчого, механізму
Формула / Реферат:
1. Спосіб керування роботою блока приводу (16) для завантажувального транспортера (1), у якому:а) багаторазово знімають показання струму, подаваного на блок приводу (16);б) виконують перше порівняння, при якому показання струму порівнюють з першим максимальним рівнем, і у випадку, якщо кількість показань, що перевищують згаданий максимальний рівень, перевищує значення зупинки максимального рівня, відключають електроживлення...
Спосіб контролю стану електричних агрегатів
Номер патенту: 39385
Опубліковано: 25.02.2009
Автори: Ємакаєв Микола Анатолійович, Соловйов Сергій Миколайович
МПК: G01L 3/00
Мітки: стану, контролю, агрегатів, електричних, спосіб
Формула / Реферат:
Спосіб контролю стану електричних агрегатів, що включає вимірювання та реєстрацію інформативних параметрів електричного агрегату й обчислювання критерію працездатності електричного агрегату, який відрізняється тим, що як критерій працездатності електричного агрегату застосовують узагальнену прогнозну характеристику працездатності агрегату в цілому (тренд), а як інформативні параметри електричного агрегату використовують, як мінімум, миттєві...
Спосіб оперативного контролю стану електричних ліній
Номер патенту: 58917
Опубліковано: 15.09.2004
Автори: Жуков Юрій Даниїлович, Гордєєв Борис Миколайович
МПК: G01R 31/08
Мітки: спосіб, ліній, стану, оперативного, електричних, контролю
Формула / Реферат:
Горілка особлива "Житомирська на бруньках золота", яка містить водно-спиртову рідину з спирту етилового ректифікованого і води питної підготовленої, ароматний спирт березових бруньок, мед натуральний, яка відрізняється тим, що додатково містить гліцерин, натрій лимоннокислий при наступному співвідношенні інгредієнтів:На 1000 дал готового продукту: Ароматний спирт березової бруньки 1,2 -1,4...
Спосіб тепловізійного контролю технічного стану елементів конструкції електричних машин та апаратів
Номер патенту: 57934
Опубліковано: 15.07.2003
Автори: Бандурян Борис Богдасарович, Кузьмін Віктор Володимирович, Остапчук Людвига Борисівна, Федоренко Григорій Михайлович, Шофул Анатолій Кирилович, Саратов Володимир Олексійович, Ефременко Володимир Генадійович
МПК: G01R 31/34, H02K 15/00
Мітки: машин, стану, конструкції, контролю, електричних, елементів, тепловізійного, технічного, апаратів, спосіб
Формула / Реферат:
1. Спосіб тепловізійного контролю технічного стану елементів конструкції електричних машин та апаратів, наприклад турбогенераторів, що включає безперервну теплову індикацію за допомогою термочутливого датчика, який пересувають у осьовому напрямку по гвинтовій лінії, фіксацію значення теплового поля у вигляді масштабної теплової карти і визначення форми і координат зон підвищеного нагріву по контрастним полям цих карт, який відрізняється тим,...
Попередній патент: Лазерний далекомір
Наступний патент: Двомасова віброплощадка з регульованими пружними опорами
Випадковий патент: Лінія приготування гранульованих кормів із джгутів екструдату