Спосіб оцінки функціонального стану нижньої кінцівки людини
Номер патенту: 91783
Опубліковано: 10.07.2014
Автори: Іваницька Алла Леонідівна, Терещенко Микола Федорович, Філіппова Марина В`ячеславівна
Формула / Реферат
Спосіб оцінки функціонального стану нижньої кінцівки людини, що включає реєстрацію і аналіз силових характеристик м'язів, що забезпечують рух в тазостегновому суглобі, реєстрацію швидкості зміни сили м'язів при ізометричному скороченні, обрахуванню середньої швидкості за час скорочення, і якщо середня швидкість менше номінальної (12 Н/с), то функціональний стан нижньої кінцівки оцінюють як незадовільний, який відрізняється тим, що заміряють та порівнюють мінімальну та максимальну силу, кути, час витримки та швидкість зміни кутів згинання колінного, тазостегнового суглобів та стопи і при умові, що ці значення менше середніх номінальних, функціональний стан нижньої кінцівки оцінюють як незадовільний.
Текст
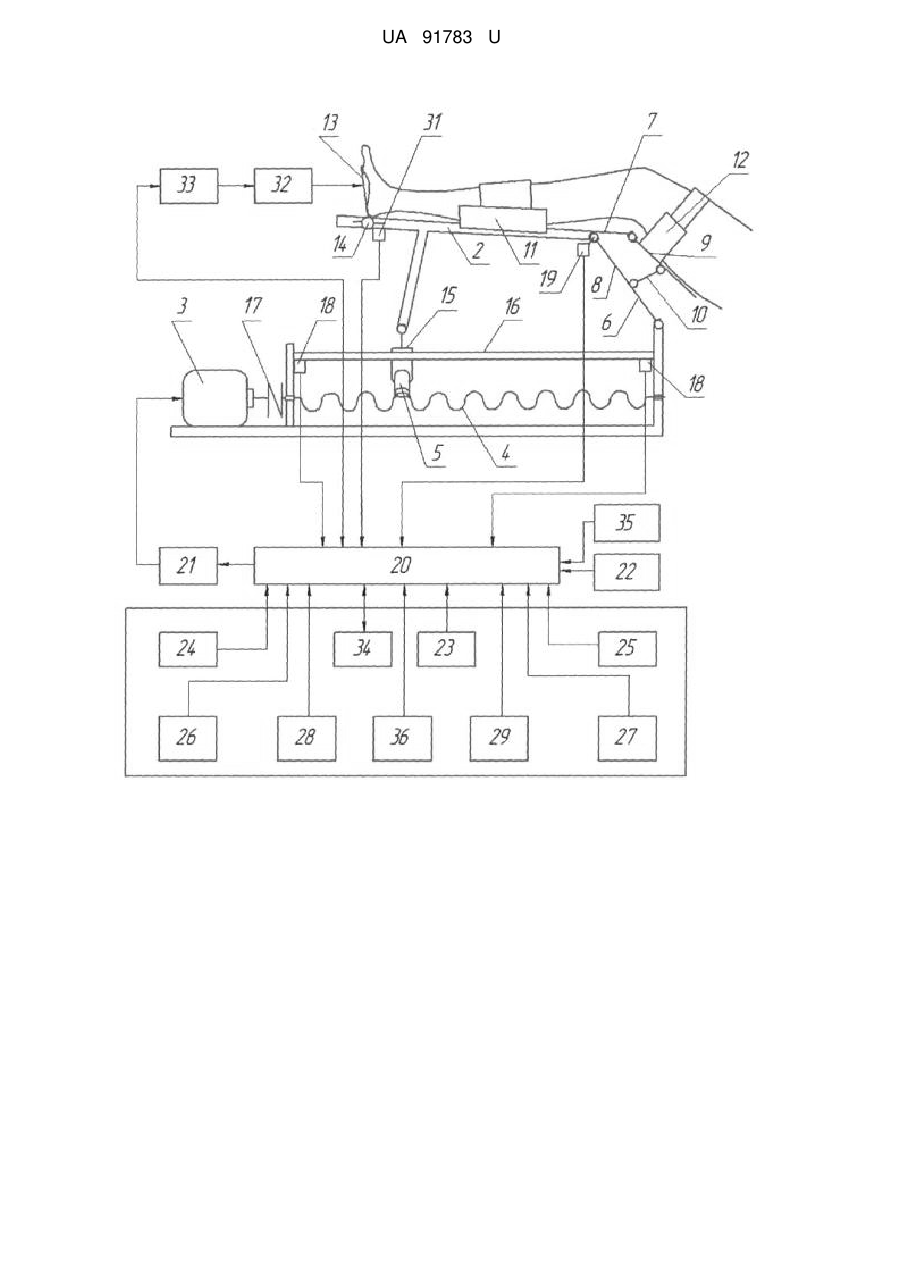
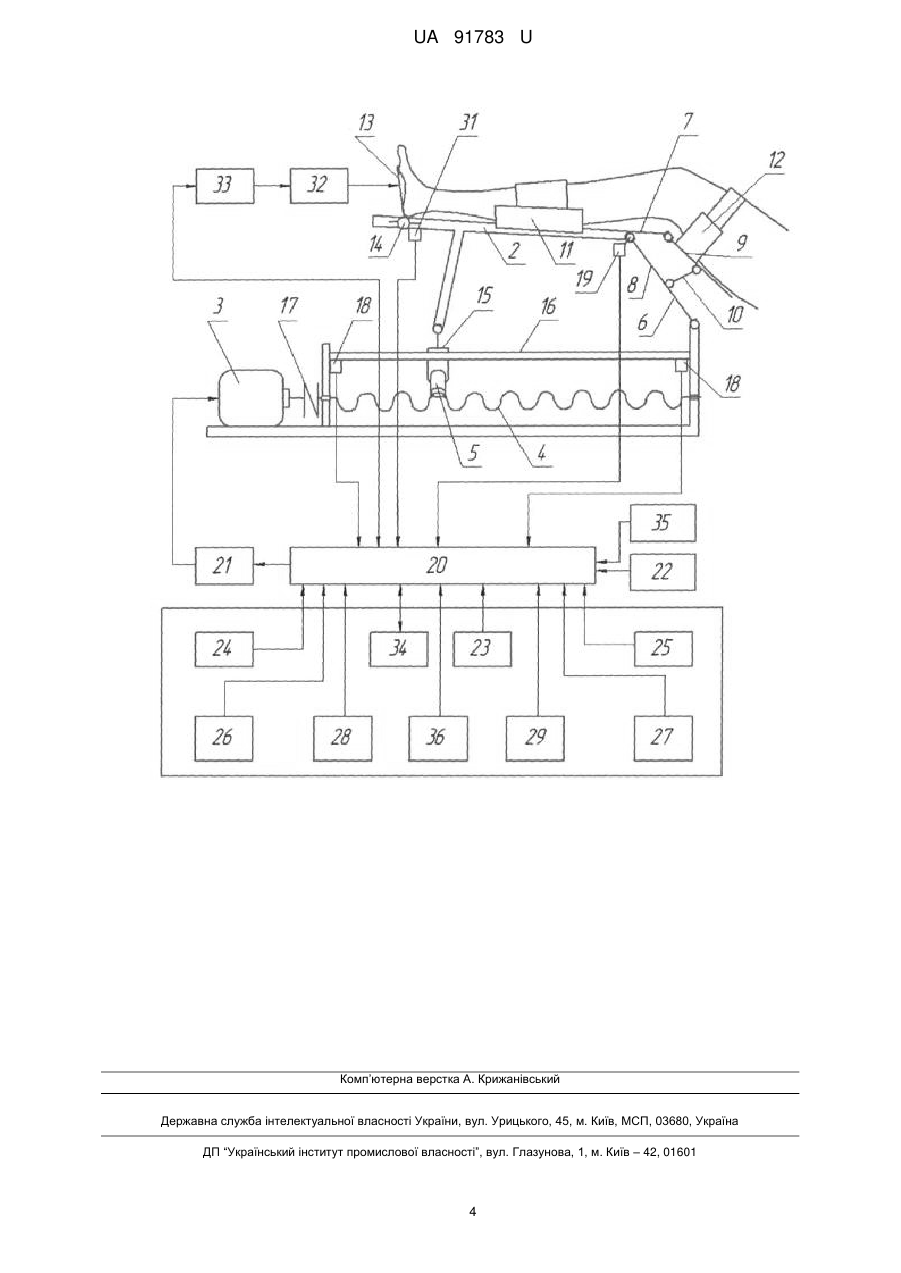
Реферат: Спосіб оцінки функціонального стану нижньої кінцівки людини включає реєстрацію і аналіз силових характеристик м'язів, що забезпечують рух в тазостегновому суглобі, реєстрацію швидкості зміни сили м'язів при ізометричному скороченні, обрахуванню середньої швидкості за час скорочення, і якщо середня швидкість менше номінальної (12 Н/с), то функціональний стан нижньої кінцівки оцінюють як незадовільний. Також заміряють та порівнюють мінімальну та максимальну силу, кути, час витримки та швидкість зміни кутів згинання колінного, тазостегнового суглобів та стопи і при умові, що ці значення менше середніх номінальних, функціональний стан нижньої кінцівки оцінюють як незадовільний. UA 91783 U (12) UA 91783 U UA 91783 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до механотерапевтичних способів оцінки функціонального стану нижньої кінцівки, з метою збільшення їх рухливості в процесі лікування та реабілітації. Відомі різні способи оцінки функціонального стану нижніх кінцівок людини, наприклад гоніометрія - вивчення та оцінка рухливості суглобів нижньої кінцівки; міографія - вивчення та оцінка міографічних характеристик м'язів нижніх кінцівок; тонусометрія - вивчення та оцінка реологічних характеристик м'язів нижніх кінцівок. Однак, вищевказані способи не враховують силові та швидкісні характеристики м'язів, які є вкрай важливими для оцінки функціонального стану нижніх кінцівок. Відомий спосіб оцінки функціонального стану нижніх кінцівок (Патент на винахід RU 2138988, кл. А61В5/22, 10.10.1999), що включає реєстрацію і аналіз силових характеристик м'язів, що забезпечують рух в тазостегновому суглобі, реєстрацію швидкості зміни сили м'язів при ізометричному скороченні, обрахуванню середньої швидкості за час скорочення, і якщо середня швидкість менше номінальної (12 Н/с), то функціональний стан нижньої кінцівки оцінюють як незадовільний. Але вищевказаний спосіб не враховує комплексний характер силового та ізометричного скорочення, його кутів і швидкості їх зміни та статичного навантаження і часу його витримки, що дозволяє більш точно оцінити ступінь ураження опорно-рухового апарату, контролювати і оцінювати якість лікування та прогнозувати стан одужання. В основу корисної моделі поставлена задача розширення функціональних можливостей в оцінці рухливості колінного, тазостегнового суглобів та стопи людини з суттєвим підвищенням комплексної точності оцінки стану кінцівки за рахунок взяття до уваги силового та ізометричного скорочення, його кутів і швидкості їх зміни та статичного навантаження з часом його витримки. Поставлена задача вирішується тим, що в способі, що включає реєстрацію і аналіз силових характеристик м'язів, що забезпечують рух в тазостегновому суглобі, реєстрацію швидкості зміни сили м'язів при ізометричному скороченні, обрахуванню середньої швидкості за час скорочення, і якщо середня швидкість менше номінальної (12 Н/с), то функціональний стан нижньої кінцівки оцінюють як незадовільний, при цьому заміряють та порівнюють мінімальну та максимальну силу, кути, час витримки та швидкість зміни кутів згинання колінного, тазостегнового суглобів та стопи і при умові, що ці значення менше середніх номінальних, функціональний стан нижньої кінцівки оцінюють як незадовільний. Спосіб здійснюють наступним чином. Пацієнта укладають на апарат, що реалізує запропонований спосіб. На кресленні зображена функціональна схема апарату, що реалізує запропонований спосіб. Апарат оцінки функціонального стану та відновлення рухливості суглобів та стопи людини містить нерухому основу 1, раму 2, реверсивний електропривод 3, з'єднаний з гвинтовою парою у вигляді ходового гвинта 4 і гайки 5, коромисла 6, шарнірно закріплені на нерухомій підставі, і трансмісію. Трансмісія виконана у вигляді двох паралельно розташованих чотириланкових механізмів, що містять першу7, другу 8, третю9 і четверту 10 ланки. Коромисла 6 жорстко пов'язані з другими ланками 8 чотириланкових механізмів, суміжних з першими ланками 7, ложемент гомілки 11 закріплений на рамі 2, ложемент стегна 12 закріплений на третій ланці 9, суміжних з першими ланками 7 і пов'язаних через четверту ланку 10 з другими ланками 8, опора стопи 13 встановлена на осі 14, що закріплюється елементами фіксації в пазу рами і контролює її положення другий датчик положення 31, динамометричний блок переміщень 32, який з'єднаний з п'єзодвигуном 33, а п'єзодвигун з'єднаний з мікроконтролером. Рама 2 шарнірно пов'язана з кареткою 15, в пазу якої розташована гайка 5 гвинтової пари з можливістю її переміщення по направляючій 16 в радіальному напрямку щодо осі ходового гвинта. Апарат містить муфту розмикання 17 та блок сигналізації 35, який повідомляє про помилки в ході виконання заданої програми реабілітації. Для забезпечення ефективного управління процесом рухливості та оцінки функціонального стану нижньої кінцівки, суглобів та стопи людини апарат містить встановлені на підставі кінцеві вимикачі 18 і встановлений на чотириланковий механізм датчик положення 19, вимірювач кутів та сили згинання, швидкості скорочення м'язів, швидкості зміни кутів та часу витримки 36, з'єднані з мікроконтролером 20, який через вузол керування реверсивним електроприводом 21 з'єднаний з реверсивним електроприводом 3. В апараті передбачений виносний пульт екстреного відключення реверсивного електроприводу 22, електрично пов'язаний з мікроконтролером 20. Для забезпечення управління процесом відновлення рухливості колінного, тазостегнового суглобів та стопи людини передбачена панель управління 30, на якій розташовані пов'язані з мікроконтролером 20 індикатор поточного значення кута згинання і встановлених значень мінімального і максимального кутів згинання 23, регулятор мінімального кута згинання 24, регулятор максимального кута згинання 25, регулятор витримки при 1 UA 91783 U 5 10 15 20 25 30 35 40 45 50 55 60 мінімальному куті згинання 26, регулятор витримки при максимальному куті згинання 27, регулятор швидкості зміни кута згинання 28 і регулятор початкової установки кута згинання 29 та персональний комп'ютер 34, який задає програму для розроблення стопи. Схема підсилювача потужності побудована на чотирьох потужних транзисторних ключах, що забезпечують реверсивне управління електродвигуном. Як електродвигун використовується колекторний двигун. Як датчик положення, встановленого на чотириланковий механізм, використаний прецизійний потенціометричний датчик. Опір датчика положення пропорційний куту згину. Для аварійної зупинки переміщення рухомої рами в двох її крайніх положеннях встановлюються два аварійних кінцевих вимикача, що забезпечують аварійне відключення електродвигуна. Кожен кінцевий вимикач зашунтований діодом, що забезпечує можливість руху каретки в протилежну сторону при спрацьовуванні кінцевого вимикача. Індикатор кута згинання 23 служить для візуального відображення поточного значення кута згинання і встановлених значень мінімального і максимального кутів згинання. Індикатором служить лінійна шкала. Поточне значення кута згинання відображається світловими індикаторами, що світиться, переміщається зі швидкістю, пропорційною швидкості переміщення каретки між двома "упорами", які відображаються у вигляді освітлених зон на обох краях шкали. Регулятори 24-29, 34 дозволяють керувати наступними параметрами руху каретки приладу: - початковим положенням; - швидкістю переміщення (~ 0,5…2 см/сек); - діапазоном o переміщення (~ 0…110 );- тривалістю зупинки (паузи) в крайніх положеннях (~0…60сек). Спосіб реалізують наступним чином. Положення ноги пацієнта фіксується на апараті оцінки функціонального стану та відновлення рухливості суглобів та стопи людини за допомогою ложемента гомілки 11 на рамі 2 пристрої і за допомогою ложемента стегна 12 на третій ланці 9 чотириланкового механізму. За допомогою елементів фіксації (на фігурах не показані) опора для стопи 13, виконана з можливістю обертання щодо осі 14, закріплюється в пазу рами 2. Здійснюють регулювання довжини других ланок 8 чотириланкового механізму перестановкою шарніра, що з'єднує другу 8 і четверту 10 ланки, або зміною довжини коромисла 6, у разі виконання його телескопічним. Регуляторами встановлюють граничні значення кутів згинання і розгинання колінного суглобу, причому одне з цих значень може збігатися з початковим кутом, тобто кутом згину суглобу до його розробки на пристрої. Крім того, встановлюють початковий кут згинання, а також тривалість витримки при крайніх значеннях кутів згинання-розгинання і швидкість переміщення каретки. При включенні апарату обертання вала реверсивного електроприводу 3 через редуктор і муфту 17 передається гвинту 4 гвинтової пари. Гайка 5 гвинтової пари переміщається уздовж напрямної 16, передаючи зусилля руху на раму 2. Переміщення рами уздовж напрямної 16 викликає рух чотириланкового механізму і відповідно стегна пацієнта, закріпленого ложементом 12 до третіх ланок 9. Як вузол, що передає рух нозі пацієнта, вибрана передача "гвинт-гайка". За допомогою вимірювача кутів та сили згинання, швидкості скорочення м'язів, швидкості зміни кутів та часу витримки 36 заміряють та порівнюють мінімальну та максимальну силу, кути, час витримки та швидкість зміни кутів згинання колінного, тазостегнового суглобів та стопи і при умові, що ці значення менше середніх номінальних, то функціональний стан нижньої кінцівки оцінюють як незадовільний. Перевага такої конструкції апарату оцінки функціонального стану та відновлення рухливості суглобів та стопи людини має кілька аспектів. Така передача самогальмується, що особливо важливо для функціональної діагностики та реабілітаційної техніки при розробці суглобів ноги людини. Це означає, що у разі відмови або несправності якоїсь системи або вузла апарата, ложемент з розташованою на ньому кінцівкою залишиться в незмінному положенні. Таким чином, виключається можливість хибної оцінки функціонального стану суглобів та стопи нижньої кінцівки та отримання хворим больового шоку. Подібна ситуація може виникнути і при раптовому відключенні електричного живлення апарата. Застосування передачі "гвинтгайка" дозволяє виключити можливість поломки механізму приводу апарату пацієнтом, чинити опір переміщенню ноги. У цьому випадку зусилля, що розвивається пацієнтом, передаватиметься через каретку на основу, а більш чутливі елементи приводу (муфта, редуктор) залишаться розвантаженими, що не спричинить їх поломку. У разі перевищення зусилля певного значення муфта 17 розмикається, запобігаючи поломці редуктора і електроприводу. Закріплення стегна пацієнта на третій ланці чотириланкового механізму дозволяє забезпечити обертання цієї ланки навколо уявної осі, що збігається з віссю тазостегнового суглоба пацієнта, і, таким чином, забезпечити поєднання природного руху стегна навколо своєї осі з рухом коромисел 6 навколо осі їх закріплення на нерухомій основі апарату. Інформація про поточне значення кутів та сили згинання, швидкості скорочення м'язів, швидкості зміни кутів та часу витримки надходить на вхід мікроконтролера у вигляді напруги з 2 UA 91783 U 5 10 15 потенціометричного датчика положення 19 і датчика 36. Ця інформація порівнюється із заданими параметрами руху, встановленими регуляторами 24-29, і використовується для вироблення сигналів, що надходять на вузол керування реверсивним електроприводом, забезпечуючи таким чином отримання оцінки функціонального стану нижніх кінцівок людини та оцінку відновлення рухливості суглобів людини. Виносний пульт екстреного відключення електроприводу дозволяє пацієнтові, при необхідності, самому зупинити електропривід. Таким чином, запропонований спосіб дозволяє точно і інформативно оцінити функціональний стан нижніх кінцівок згинання колінного, тазостегнового суглобів та стопи людини, об'єктивно та комплексно оцінити ефективність реабілітаційних заходів при травмах і захворюваннях нижніх кінцівок. Корисна модель дозволяє суттєво розширити функціональні можливості в оцінці функціонального стану та рухливості колінного, тазостегнового суглобів та стопи людини зі значним підвищенням комплексної точності оцінки стану кінцівки за рахунок взяття до уваги силового та ізометричного скорочення, його кутів і швидкості їх зміни та статичного навантаження протягом часу його витримки. Також дозволяє одночасно оцінювати функціональні можливості колінного, тазостегнового суглобів та стопи. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 20 25 Спосіб оцінки функціонального стану нижньої кінцівки людини, що включає реєстрацію і аналіз силових характеристик м'язів, що забезпечують рух в тазостегновому суглобі, реєстрацію швидкості зміни сили м'язів при ізометричному скороченні, обрахуванню середньої швидкості за час скорочення, і якщо середня швидкість менше номінальної (12 Н/с), то функціональний стан нижньої кінцівки оцінюють як незадовільний, який відрізняється тим, що заміряють та порівнюють мінімальну та максимальну силу, кути, час витримки та швидкість зміни кутів згинання колінного, тазостегнового суглобів та стопи і при умові, що ці значення менше середніх номінальних, функціональний стан нижньої кінцівки оцінюють як незадовільний. 3 UA 91783 U Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюFilippova Maryna Viacheslavivna
Автори російськоюФилиппова Марина Вячеславовна
МПК / Мітки
МПК: A61B 5/22
Мітки: кінцівки, функціонального, стану, людини, оцінки, спосіб, нижньої
Код посилання
<a href="https://ua.patents.su/6-91783-sposib-ocinki-funkcionalnogo-stanu-nizhno-kincivki-lyudini.html" target="_blank" rel="follow" title="База патентів України">Спосіб оцінки функціонального стану нижньої кінцівки людини</a>
Спосіб непрямої оцінки функціонального стану опорно-рухового апарату людини
Номер патенту: 58892
Опубліковано: 15.08.2003
Автори: Рябов Олег Валентинович, Суббота Ігор Анатолійович, Радченко Володимир Олександрович, Мітелев Дмитро Анатолійович, Карпінський Михайло Юрійович
МПК: A61B 5/103
Мітки: непрямо, опорно-рухового, людини, апарату, стану, функціонального, оцінки, спосіб
Формула / Реферат:
Спосіб непрямої оцінки функціонального стану опорно-рухового апарату людини, що заснований на отриманні статограм при двохопорному стоянні та стоянні з переважною опорою на кожну з нижніх кінцівок із наступним порівняльним аналізом проекцій загального центра мас на площині опори при одноопорному стоянні на правій та лівій кінцівках відносно сагітальної площини, яка проходить через центр проекції загального центра мас при двохопорному стоянні,...
Спосіб а.п. лябаха оцінки стану м`яких тканин нижньої кінцівки
Номер патенту: 20800
Опубліковано: 15.02.2007
Автори: Турчин Олена Андріївна, Якімов Дмитро Юрійович, Артеменко Владислава Олегівна, Міхневич Олег Едуардович, Лябах Андрій Петрович, Пятковський Володимир Михайлович
МПК: A61B 5/103
Мітки: нижньої, оцінки, тканин, спосіб, стану, лябаха, м'яких, кінцівки, а.п
Формула / Реферат:
Спосіб оцінки стану м'яких тканин нижньої кінцівки, який передбачає вимірювання товщини м'яких тканин кінцівки за допомогою ультразвукового дослідження, який відрізняється тим, що товщину м'яких тканин опорної поверхні п'яти вимірюють з навантаженням та без нього, розраховують їх модуль пружності і, при показниках модуля пружності >1,36 кгс/см2, діагностують наявність трофічних розладів нижньої кінцівки.
Спосіб оцінки рівня функціонального стану організму людини
Номер патенту: 5663
Опубліковано: 15.03.2005
Автори: Мельник Юрій Віталійович, Поляков Олександр Анатолійович, Маслова Маргарита Георгіївна
МПК: A61B 5/0205
Мітки: оцінки, рівня, організму, функціонального, спосіб, людини, стану
Формула / Реферат:
Спосіб визначення рівня функціонального стану організму людини, що включає визначення співвідношення маси тіла і зросту, артеріального тиску, частоти серцевих скорочень до і після навантаження, життєвої ємкості легень, часу затримки дихання на вдоху і на видоху, показника статичного балансування і розрахування показника рівня функціонального стану за формулою:
Спосіб оцінки функціонального стану людини
Номер патенту: 38981
Опубліковано: 26.01.2009
Автори: ЛЯХ ЮРІЙ ЄРЕМІЙОВИЧ, Вихованець Юрій Георгійович, Прокопець Валентин Іванович, Вихованець Тетяна Анатоліївна, Якимова Ксенія Олександрівна
МПК: A61B 5/16
Мітки: стану, людини, оцінки, функціонального, спосіб
Формула / Реферат:
Спосіб оцінки функціонального стану людини шляхом визначення показників психомоторної діяльності, який відрізняється тим, що задають темп психомоторної діяльності, контролюють моторні дії та виконують візуальний зворотний зв'язок на кожні п'ять секунд протягом 30 секунд, підраховують кількість моторних дій за кожні п'ять секунд та визначають показник психомоторної діяльності за формулою:
Спосіб інтегральної оцінки поточного функціонального стану серцево-судинної системи людини
Номер патенту: 16024
Опубліковано: 17.07.2006
Автор: Файнзільберг Леонід Соломонович
МПК: A61B 5/024
Мітки: стану, спосіб, людини, оцінки, серцево-судинної, системі, поточного, інтегральної, функціонального
Формула / Реферат:
Спосіб інтегральної оцінки поточного функціонального стану серцево-судинної системи людини полягає у тому, що вимірюють сигнал, який несе інформацію про зміну в часі електричної активності серця, визначають поточну швидкість зміни цього сигналу та спостерігають у фазовому просторі координат траєкторію, що відображає залежність поточної швидкості зміни сигналу, що вимірюють відносно поточного рівня цього сигналу під час спостереження, який...
Попередній патент: Кожухотрубний теплообмінник
Наступний патент: Автоматизований апарат для магнітотерапії
Випадковий патент: Сировинна суміш для одержання клінкеру