Спосіб мережної обробки інформації
Номер патенту: 92812
Опубліковано: 10.09.2014
Автори: Стрельницький Олексій Олександрович, Андрусевич Володимир Анатолійович, Обод Іван Іванович

Формула / Реферат
Спосіб мережної обробки інформації, який полягає в тому, що за допомогою систем спостереження, включених до мережі, приймають, обробляють та виявляють інформаційні сигнали, на основі міжперіодної обробки інформаційних сигналів проводять первинну обробку інформації, на основі міжоглядової обробки координатної інформації проводять вторинну обробку інформації, формують єдину шкалу часу мережі систем спостереження, передають результати обробки інформації у центр мережної обробки інформації, у якому, на основі результатів обробки окремих систем спостереження, прогнозують вектор стану повітряного об'єкта, за яким спостерігають на цей час, проводять вагову обробку прийнятої інформації від систем спостереження та прогнозованого вектора стану повітряного об'єкта і на основі цього формують результуючу інформацію супроводу повітряного об'єкта, яку видають користувачам, який відрізняється тим, що у кожній системі спостереження позначають часом результати первинної обробки інформації, проводять поєднання інформації систем залежного спостереження та інформації вторинної обробки системи спостереження, а результат поєднання передають у центр мережної обробки інформації.
Текст
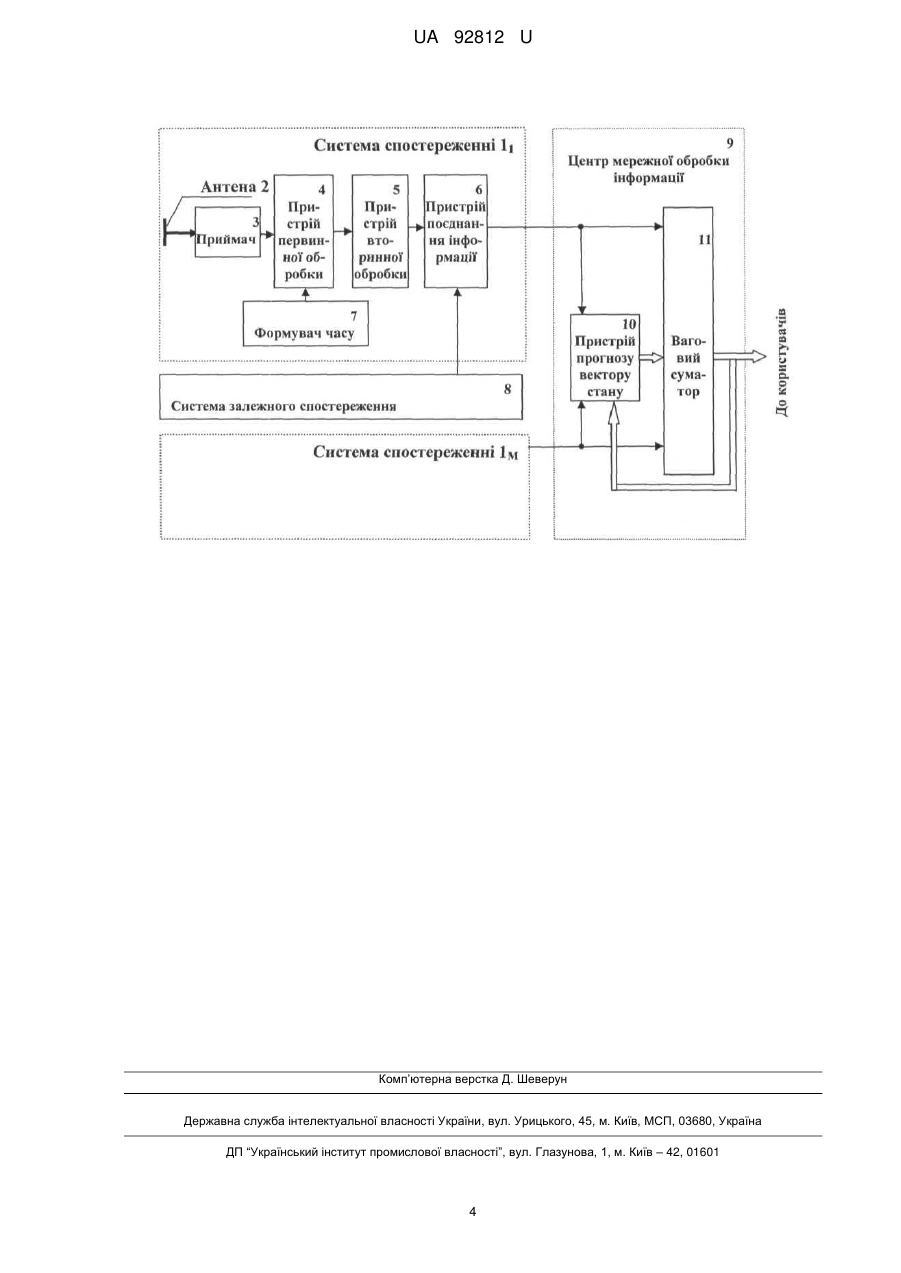
Реферат: Спосіб мережної обробки інформації полягає в тому, що за допомогою систем спостереження, включених до мережі, приймають, обробляють та виявляють інформаційні сигнали. На основі міжперіодної обробки інформаційних сигналів проводять первинну обробку інформації, на основі міжоглядової обробки координатної інформації проводять вторинну обробку інформації. Формують єдину шкалу часу мережі систем спостереження, передають результати обробки інформації у центр мережної обробки інформації. На основі результатів обробки окремих систем спостереження, прогнозують вектор стану повітряного об'єкта, за яким спостерігають. Проводять вагову обробку прийнятої інформації від систем спостереження та прогнозованого вектора стану повітряного об'єкта. Формують результуючу інформацію супроводу повітряного об'єкта, яку видають користувачам. У кожній системі спостереження позначають часом результати первинної обробки інформації. Проводять поєднання інформації систем залежного спостереження та інформації вторинної обробки системи спостереження. Результат поєднання передають у центр мережної обробки інформації. UA 92812 U (54) СПОСІБ МЕРЕЖНОЇ ОБРОБКИ ІНФОРМАЦІЇ UA 92812 U UA 92812 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі інформаційних технологій і може бути використана при обробці радіолокаційної, радіонавігаційної, радіотехнічної інформації у мережі однопозиційних та багатопозиційних радіолокаторів, та подібних залежних та незалежних систем спостереження за повітряними об'єктами, включеними до єдиної інформаційної мережі. Відомий спосіб мережної обробки інформації [1] полягає в тому, що за допомогою систем спостереження, включених до мережі, приймають, оброблять та виявляють інформаційні сигнали, на основі міжперіодної обробки проводять первинну обробку інформації, на основі міжоглядової обробки координатної інформації проводять вторинну обробку інформації та передають результати вторинної обробки інформації у центр мережної обробки інформації де проводять третинну обробку інформації. Наявність операції третинної обробки інформації у відомому способі, тобто поєднання траєкторій повітряних об'єктів, які спостерігаються різними системами спостереження, не ураховує наявності надмірності вимірів, що суттєвим чином знижує показники якості вимірювання координат повітряних об'єктів. Цей недолік обумовлений різним та неузгодженим темпом видачі координатної інформації, рознесеної за простором залежними та незалежними системами спостереження, які входять у мережу. Крім усього, наявність третинної обробки інформації, як процедури поєднання траєкторій повітряних об'єктів, потребує здійснювати вторинну обробку інформації, що призводить до значних затрат. Недоліком способу є низька точність розрахунку координат повітряних об'єктів. Найбільш близьким аналогом до корисної моделі є спосіб мережної обробки інформації [2], який полягає в тому, що за допомогою систем спостереження, включених до мережі, приймають, обробляють та виявляють інформаційні сигнали, на основі міжперіодної обробки інформаційних сигналів проводять первинну обробку інформації, на основі міжоглядової обробки координатної інформації проводять вторинну обробку інформації, формують єдину шкалу часу мережі систем спостереження, передають результати обробки інформації у центр мережної обробки інформації, у якому, на основі результатів обробки окремих систем спостереження, прогнозують вектор стану повітряного об'єкта, за яким спостерігають, на цей час, проводять вагову обробку прийнятої інформації від систем спостереження та прогнозованого вектора стану повітряного об'єкта і на основі цього формують результуючу інформацію супроводу повітряного об'єкта, яку видають користувачам. Недоліком способу-аналога є низька точність розрахунку координат повітряних об'єктів, які супроводжуються. Не врахування часу отримання інформації вторинної обробки на кожній системі спостереження, у тому числі і на залежних системах спостереження, призводить з одного боку до погіршення якості мережевого супроводу повітряних об'єктів за потреби в розширенні стробу спостереження, що призводить до зниження точності розрахунку координат повітряних об'єктів та зниженню завадостійкості обробки інформації, а з другого боку виникають складності з урахуванням інформації залежних систем спостереження для підвищення точності оцінки координат повітряних об'єктів. Крім усього, виключення третинної обробки інформації у відомому способі, як процедури поєднання траєкторій повітряних об'єктів, створює складності включення інформації залежних систем спостереження для підвищення якості інформації єдиної інформаційної мережі систем спостереження. В основу корисної моделі поставлена задача створити спосіб мережної обробки інформації, в якому введенням нових операцій позначення часом результатів первинної обробки інформації у кожній системі спостереження, проведення поєднання інформації систем залежного спостереження та інформації вторинної обробки системи спостереження та передачі результатів поєднання у центр мережної обробки інформації виключалась би потреба у розширенні строба спостереження при супроводі повітряних об'єктів, а також потреба у проведенні третинної обробки інформації для врахування інформації залежних систем спостереження інформації, за рахунок чого підвищувалась би точність розрахунку координат повітряних об'єктів, які супроводжуються. Поставлена задача вирішується тим, що у способі мережної обробки інформації, який полягає в тому, що за допомогою систем незалежного спостереження, включених до мережі, приймають, обробляють та виявляють інформаційні сигнали, на основі міжперіодної обробки інформаційних сигналів проводять первинну обробку інформації, на основі міжоглядової обробки координатної інформації проводять вторинну обробку інформації, формують єдину шкалу часу мережі систем спостереження, передають результати обробки інформації у центр мережної обробки інформації, у якому, на основі результатів обробки окремих систем спостереження, прогнозують вектор стану повітряного об'єкта, за яким спостерігають, на цей час, проводять вагову обробку прийнятої інформації від систем спостереження та 1 UA 92812 U 5 10 15 20 25 30 35 40 45 50 55 прогнозованого вектора стану повітряного об'єкта і на основі цього формують результуючу інформацію супроводу повітряного об'єкта, яку видають користувачам, згідно з корисною моделлю, у кожній системі спостереження позначають часом результати первинної обробки інформації, проводять поєднання інформації систем залежного спостереження та інформації вторинної обробки системи спостереження, а результат поєднання передають у центр мережної обробки інформації. Технічний результат, який може бути отриманий при здійсненні корисної моделі полягає у врахуванні часових моментів отримання вторинної інформації про повітряні об'єкти при об'єднані інформації незалежних та залежних систем спостереження, які включені до мережі, що призводить до підвищення точності розрахунку координат повітряних об'єктів, які супроводжуються. Корисна модель полягає в наступному. На кожній незалежній системі спостереження, включеній до мережі, приймають інформаційні сигнали, тобто ехо-сигнали, сигнали відповіді та інші, які містять інформацію про просторові координати повітряних об'єктів, які спостерігаються. Ці прийняті інформаційні сигнали обробляють та виявляють з потрібними показниками якості. У подальшому по прийнятих сигналах, на основі проведення міжперіодної обробки, виявляють повітряні об'єкти та здійснюють вимір їх просторових координат. Тобто проводять первинну обробку інформації. Результати первинної обробки позначають часом її отримання, який отримують з єдиної шкали часу мережі систем спостереження. У подальшому, на основі проведення міжоглядової обробки результатів первинної обробки інформації, проводять вторинну обробку інформації, тобто проводять траєкторну обробку. Залежними системами спостереження приймають інформацію повітряних об'єктів, яка містить час її отримання. За результатами часової ідентифікації інформації вторинної обробки незалежних систем спостереження та залежних систем спостереження поєднують інформацію про повітряні об'єкти та передають у центр мережної обробки інформації. У центрі мережної обробки інформації, на основі аналізу часу отримання результатів обробки інформації кожної з систем спостереження, які включені до мережі, здійснюють прогнозування вектора стану повітряного об'єкта, за яким спостерігають, на цей час, проводять вагову обробку прийнятої інформації від систем спостереження та прогнозованого вектору стану повітряного об'єкта і на основі цього формують результуючу інформацію супроводу повітряного об'єкта, яку видають користувачам. Корисна модель може бути реалізована, наприклад, за допомогою пристрою, структурна схема якого приведена на кресленні. В кожній з систем спостереження 11-1М, які включені до мережі, за допомогою антени 2, приймача 3 та пристрою первинної обробки 4 проводять первинну обробку, тобто сигнали виявляють з потрібними показниками якості і на основі міжперіодної обробки здійснюють виявлення повітряних об'єктів та вимір їх координат. Результати первинної обробки, позначають часом їх отримання, який видають з формувача часу 7. Координатна інформація по кожному об'єкту надходить у пристрій вторинної обробки 5, де, на основі міжоглядової обробки, здійснюють траєкторну (вторинну) обробку інформації. Системою залежного спостереження 8 приймають інформацію від повітряних об'єктів, яка позначена часом її отримання. На основі аналізу часу отримання інформації залежних та незалежних систем спостереження у пристрої поєднання інформації 6 систем спостереження 1 здійснюють поєднання інформації від одноіменних повітряних об'єктів та надсилають її у центр мережної обробки 9. В центрі мережної обробки 9, на основі часу отримання результатів вторинної обробки інформації кожної з систем спостереження 1, які включені до мережі, за допомогою пристрою прогнозу вектору стану 10 здійснюють прогнозування вектора стану повітряного об'єкту за яким спостерігають, на цей час, за допомогою вагового суматора 11 проводять вагову обробку прийнятої інформації від систем спостереження та прогнозованого вектора стану повітряного об'єкта і на основі цього формують результуючу інформацію супроводу повітряного об'єкта, яку видають користувачам. Алгоритм поєднання інформації при супроводі повітряних об'єктів пояснимо на тому, що у інформаційній мережі існує дві системі спостереження, темп огляду простору яких розрізнений. В кожній з систем спостереження існує своя шкала часу, організована, наприклад, за допомогою GPS приймальників, що характеризується часовим процесом Тij, де індексом і позначають номер джерела отримання інформації (і=1, 2), а j - дискретний час отримання інформації. Припустимо, що по j=k попереднім вимірам в апаратурі споживача отримана результуюча оцінка вектору стану W k 1k з відповідною матрицею точності C k . 2 UA 92812 U При отриманні поточної оцінки вектора стану, наприклад від другої системи спостереження в момент часу k 1 W y(k 1) 2(k 1) з матрицею точності C y(k 1) , по даних результуючої оцінки вектора стану і матриці точності на k-ому кроку здійснюється обчислення апріорного розподілу на цей крок вимірів. Цьому розподілу відповідає W 0(k 1) 1(k 1) і C 0(k 1) , тобто здійснюється 5 прогнозування вектора стану і матриці точності на час часу отримання поточної оцінки вектору стану. Результуючу оцінку вектора стану і матрицю точності на час часу k+1 можна записати як W k 1 1(k 1) W 0(k 1) 1(k 1) Ck11C y(k 1) W yk 1 2(k 1) W 0(k 1) 1(k 1) , C k 1 C 0(k 1) C y(k 1) . 10 15 20 25 Надалі процедура повторюється. Таким чином, отримано рекурентне правило, що дозволяє послідовно в часі виробляти фільтрацію траєкторії повітряного об'єкта при отриманні вимірів від систем спостереження з різноманітним темпом видачі інформації та різними матрицями точності. Як слідує з викладеного вище, розглянутий алгоритм фільтрації відрізняється від алгоритму відомого способу - аналога тим, що прогнозування вектора стану і матриці точності здійснюється після отримання нових вимірів, що існують час їхнього отримання. От на цей момент часу і здійснюється прогнозування вектора стану і матриці точності. Таким чином, введення нових операцій (позначення часом результатів первинної обробки інформації у кожній системі незалежного спостереження, проведення поєднання інформації систем залежного спостереження та інформації вторинної обробки системи незалежного спостереження та передачі результатів поєднання у центр мережної обробки інформації) виключає потребу у розширенні строба спостереження при супроводі повітряних об'єктів, а також потребу у проведенні третинної обробки інформації для врахування інформації систем залежного спостереження інформації, за рахунок чого підвищується точність розрахунку координат повітряних об'єктів. Джерело інформації: 1. Фарина Α., Студер Ф. Цифровая обработка радиолокационной информации. -М.: Радио и связь, 1993. С.46-48. 2. Спосіб мережної обробки інформації. Патент UA №50595 МІЖ (2006.01)G01 S 13/02. Опубл., 10.06.2010, бюл. №11 (прототип). 30 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 35 40 45 Спосіб мережної обробки інформації, який полягає в тому, що за допомогою систем спостереження, включених до мережі, приймають, обробляють та виявляють інформаційні сигнали, на основі міжперіодної обробки інформаційних сигналів проводять первинну обробку інформації, на основі міжоглядової обробки координатної інформації проводять вторинну обробку інформації, формують єдину шкалу часу мережі систем спостереження, передають результати обробки інформації у центр мережної обробки інформації, у якому, на основі результатів обробки окремих систем спостереження, прогнозують вектор стану повітряного об'єкта, за яким спостерігають на цей час, проводять вагову обробку прийнятої інформації від систем спостереження та прогнозованого вектора стану повітряного об'єкта і на основі цього формують результуючу інформацію супроводу повітряного об'єкта, яку видають користувачам, який відрізняється тим, що у кожній системі спостереження позначають часом результати первинної обробки інформації, проводять поєднання інформації систем залежного спостереження та інформації вторинної обробки системи спостереження, а результат поєднання передають у центр мережної обробки інформації. 3 UA 92812 U Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюObod Ivan Ivanovych, Strelnytskyy Oleksiy Oleksandrovych, Andrusenko Volodymyr Anatoliyovych
Автори російськоюОбод Иван Иванович, Стрельницкий Алексей Александрович, Андрусевич Владимир Анатолиевич
МПК / Мітки
МПК: G01S 13/02
Мітки: мережної, обробки, спосіб, інформації
Код посилання
<a href="https://ua.patents.su/6-92812-sposib-merezhno-obrobki-informaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб мережної обробки інформації</a>
Спосіб мережної обробки інформації
Номер патенту: 50595
Опубліковано: 10.06.2010
Автори: Обод Іван Іванович, Заволодько Ганна Едвардівна, Охрименко Максим Юрійович
МПК: G01S 13/02
Мітки: обробки, мережної, інформації, спосіб
Формула / Реферат:
Спосіб мережної обробки інформації, який полягає в тому, що за допомогою систем спостереження, включених до мережі, приймають, оброблять та виявляють інформаційні сигнали, на основі міжперіодної обробки інформаційних сигналів проводять первинну обробку інформації, на основі міжоглядової обробки координатної інформації проводять вторинну обробку інформації, формують єдину шкалу часу мережі систем спостереження, позначають часом результати...
Спосіб мережної обробки інформації
Номер патенту: 32165
Опубліковано: 12.05.2008
Автори: Обод Іван Іванович, Козіна Ольга Андріївна, Маліх Катерина Олександрівна
МПК: G01S 13/00
Мітки: мережної, спосіб, інформації, обробки
Формула / Реферат:
Спосіб мережної обробки інформації, який полягає в тому, що за допомогою систем спостереження, включених до мережі, приймають, обробляють та виявляють інформаційні сигнали, на основі міжперіодної обробки інформаційних сигналів проводять первинну обробку інформації, на основі міжоглядової обробки координатної інформації проводять вторинну обробку інформації та передають результати вторинної обробки інформації у центр мережної обробки...
Спосіб мережної обробки інформації спільних інформаційних систем
Номер патенту: 35887
Опубліковано: 10.10.2008
Автори: Заволодько Ганна Едвардівна, Обод Іван Іванович
МПК: G01S 13/00
Мітки: систем, спільних, обробки, мережної, спосіб, інформації, інформаційних
Формула / Реферат:
Спосіб мережної обробки інформації спільних інформаційних систем, який полягає в тому, що за допомогою первинного та вторинного радіолокаторів випромінюють зондуючі сигнали та сигнали запиту, приймають ехо-сигнали та сигнали відповіді, виявляють ці сигнали, на основі первинної обробки роздільно визначають координати повітряних об'єктів за інформацією первинного та вторинного радіолокаторів і формують єдину інформаційну посилку споживачам,...
Спосіб розподіленої обробки інформації
Номер патенту: 51281
Опубліковано: 12.07.2010
Автори: Заволодько Ганна Едвардівна, Обод Іван Іванович, Охрименко Максим Юрійович
МПК: G01S 13/02
Мітки: спосіб, інформації, розподіленої, обробки
Формула / Реферат:
Спосіб розподіленої обробки інформації, який полягає в тому, що за допомогою систем спостереження, включених до мережі, приймають, оброблять та виявляють інформаційні сигнали, формують єдину шкалу часу мережі систем спостереження, який відрізняється тим, що оцінюють параметри сигналів, котрі виявлені, позначають часом результати оцінки параметрів сигналів систем спостереження, котрі виявлені, передають результати оцінки параметрів сигналів...
Спосіб розподіленої обробки інформації в мережі систем спостереження
Номер патенту: 49924
Опубліковано: 11.05.2010
Автори: Обод Іван Іванович, Охрименко Максим Юрійович, Заволодько Ганна Едвардівна
МПК: G01S 13/02
Мітки: інформації, обробки, спостереження, розподіленої, мережі, спосіб, систем
Формула / Реферат:
Спосіб розподіленої обробки інформації в мережі систем спостереження, який полягає в тому, що за допомогою систем спостереження, включених до мережі, приймають, оброблять та виявляють інформаційні сигнали, на основі міжперіодної обробки інформаційних сигналів проводять первинну обробку інформації, формують єдину шкалу часу мережі систем спостереження, який відрізняється тим, що позначають часом результати первинної обробки інформації систем...
Попередній патент: Деградабельна полімерна композиція
Наступний патент: Сушильний пристрій
Випадковий патент: Лікарська комбінація з теоброміном та опіатом і її використання в лікуванні кашлю