Спосіб слідкування за частотою сигналу в системах фапч з комбінованим управлінням
Номер патенту: 93399
Опубліковано: 25.09.2014
Автори: Ємельянченко Вадим Сергійович, Романов Олексій Миколайович, Водоп'ян Сергій Васильович, Каневський Леонід Броніславович

Формула / Реферат
Спосіб слідкування за частотою сигналу в системах ФАПЧ з комбінованим управлінням, згідно з яким фазу сигналу на вході фазового автоматичного підстроювання частоти (ФАПЧ) порівнюють з фазою вихідного сигналу з генератора, що керується напругою (ГКН), отримуючи сигнал помилки слідкування, який потім фільтрують, залишаючи лише низькочастотну складову, далі з відфільтрованого сигналу виробляють основний сигнал управління ГКН, потім основний сигнал управління ГКН складають з компенсаційним сигналом управління ГКН, отримуючи сумарний сигнал управління ГКН, яким і перестроюють вихідну частоту ГКН, після чого весь цикл операцій повторюють з самого початку, який відрізняється тим, що одночасно з низькочастотною фільтрацією сигналу помилки слідкування за ним здійснюють оцінювання фази сигналу на вході ФАПЧ, отримуючи сигнал оцінки, з якого і виробляють компенсаційний сигнал управління ГКН.
Текст
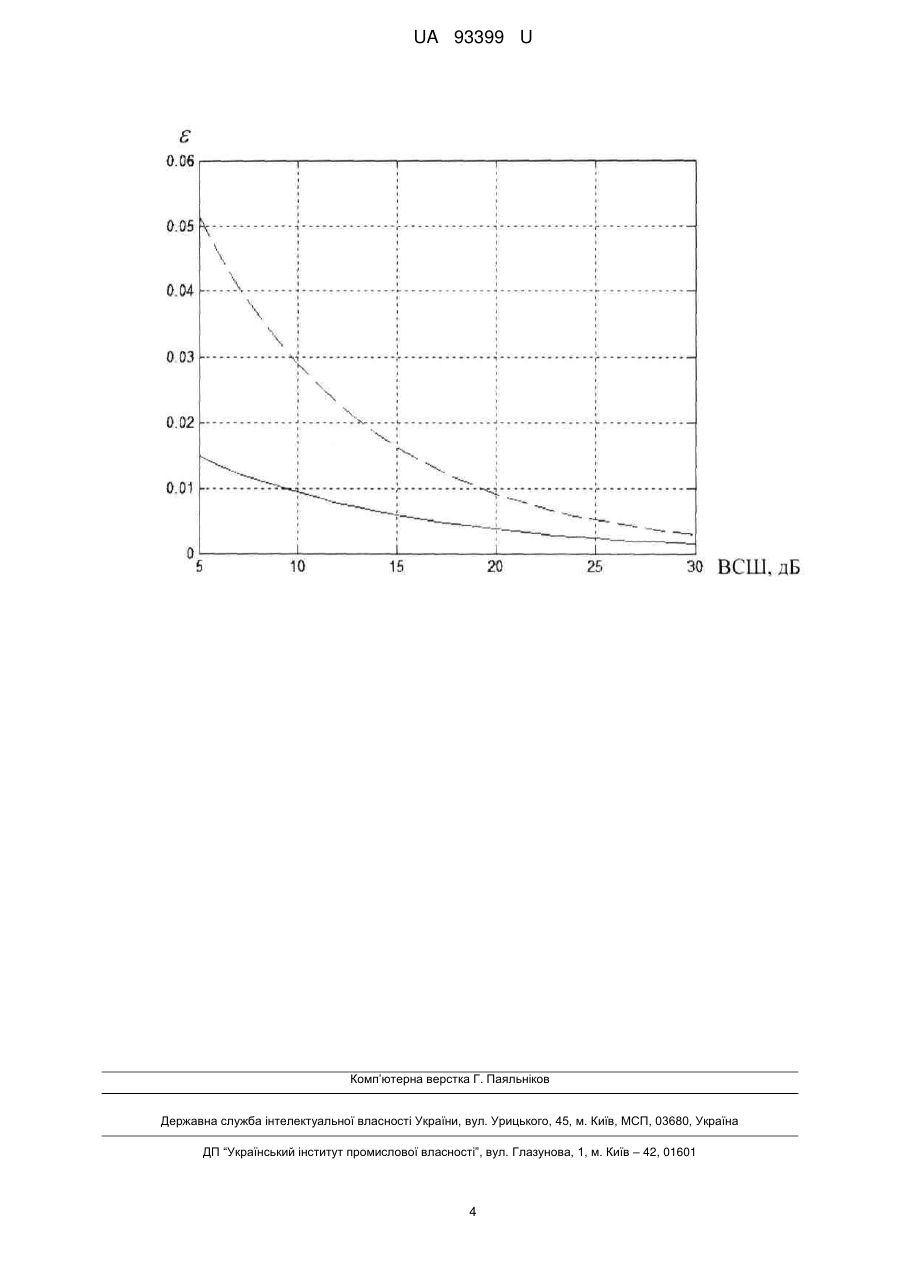
Реферат: Спосіб слідкування за частотою сигналу в системах ФАПЧ з комбінованим управлінням, згідно з яким фазу сигналу на вході фазового автоматичного підстроювання частоти (ФАПЧ) порівнюють з фазою вихідного сигналу з генератора, що керується напругою (ГКН), отримуючи сигнал помилки слідкування, який потім фільтрують, залишаючи лише низькочастотну складову. Далі з відфільтрованого сигналу виробляють основний сигнал управління ГКН, потім основний сигнал управління ГКН складають з компенсаційним сигналом управління ГКН, отримуючи сумарний сигнал управління ГКН, яким і перестроюють вихідну частоту ГКН, після чого весь цикл операцій повторюють з самого початку. Одночасно з низькочастотною фільтрацією сигналу помилки слідкування за ним здійснюють оцінювання фази сигналу на вході ФАПЧ, отримуючи сигнал оцінки, з якого і виробляють компенсаційний сигнал управління ГКН. UA 93399 U (12) UA 93399 U UA 93399 U 5 10 15 20 25 30 35 Корисна модель належить до галузі радіозв'язку і може бути використана для підвищення точності роботи систем фазового автоматичного підстроювання частоти (ФАПЧ) при низьких відношеннях сигналу до шуму (ВСШ). В системах зв'язку для здійснення синхронізації приймальної і передавальної апаратури виникає потреба у слідкуванні за опорним сигналом, присутнім в явному вигляді або виділеному з інформаційного сигналу, для чого використовують системи ФАПЧ. Найбільш близьким способом, вибраним як найближчий аналог, є спосіб комбінованого управління системою ФАПЧ [1, стор. 183]. У найближчому аналогу, як і в заявленому способі, фазу сигналу на вході ФАПЧ порівнюють з фазою вихідного сигналу з генератора, що керується напругою (ГКН), отримуючи сигнал помилки слідкування, який потім фільтрують, залишаючи лише низькочастотну складову, далі з відфільтрованого сигналу виробляють основний сигнал управління ГКН, потім основний сигнал управління ГКН складають з компенсаційним сигналом управління ГКН, отримуючи сумарний сигнал управління ГКН, яким і перестроюють вихідну частоту ГКН, після чого весь цикл операцій повторюють з самого початку. Але, на відміну від способу, що пропонується, у найближчому аналогу сигнал на вході ФАПЧ надходить у компенсаційний канал, що представляє собою зв'язок по задаючій дії, передаточна функція якого вибирається із умови підвищення порядку астатизму системи для слідкування за детермінованою складовою вхідного сигналу, що не дозволяє врахувати вимоги до статистичної точності системи і при низькому ВСШ призводить до зниження точності слідкування за вхідним сигналом. В основу корисної моделі поставлено задачу вдосконалення способу слідкування за частотою сигналу в системах ФАПЧ з комбінованим управлінням, згідно з яким фазу сигналу на вході ФАПЧ порівнюють з фазою вихідного сигналу з ГКН, отримуючи сигнал помилки слідкування, який потім фільтрують, залишаючи лише низькочастотну складову, далі з відфільтрованого сигналу виробляють основний сигнал управління ГКН, потім основний сигнал управління ГКН складають з компенсаційним сигналом управління ГКН, отримуючи сумарний сигнал управління ГКН, яким і перестроюють вихідну частоту ГКН, після чого весь цикл операцій повторюють з самого початку, при цьому, згідно з корисною моделлю, одночасно з низькочастотною фільтрацією сигналу помилки слідкування за ним здійснюють оцінювання фази сигналу на вході ФАПЧ, отримуючи сигнал оцінки, з якого і виробляють компенсаційний сигнал управління ГКН, що забезпечить підвищення точності роботи ФАПЧ при низьких ВСШ. Поставлена задача вирішується проектуванням системи ФАПЧ, виходячи з наступних міркувань. Система ФАПЧ відслідковує вхідний сигнал, детермінована складова якого задається виразом x n 2f0 hn , де n - номер відліку дискретного сигналу у часі, - стала, f0 піднесуча частота сигналу, задається виразом Zxn Z2f0hn 40 45 h - період дискретизації. Математична модель вхідного сигналу 2f0hz 1 1 z 1 2 , (1) де z - оператор зсуву у часі. Поліном A z визначає динаміку процесів управління, а поліном B z - динаміку процесів оцінювання в системі ФАПЧ. Вони вибираються, виходячи з критерію відсутності динамічних помилок управління і оцінювання при детермінованому вхідному сигналі, математична модель якого задається виразом (1), за допомогою третьої форми досягнення інваріантності: AzZxn 0; (2) Bz Zxn 0. Поліноми S1 z і S 2 z визначають імпульсну передаточну функцію фільтра нижніх частот S1 z (ФНЧ) , яка вибирається, виходячи з бажаної частотної характеристики ФНЧ, відповідно S 2 z до математичної моделі вхідного сигналу (1). Поліноми Mz і Nz визначають імпульсну передаточну функцію ГКН Mz . При Nz лінеаризації імпульсної передаточної функції ГКН, миттєва частота на виході якого пропорційна 1 UA 93399 U напрузі керування на вході, ці поліноми приймають вид: M z k Г hz 1 , N z 1 z 1 , де k Г коефіцієнт підсилення ГКН. Характеристичний поліном системи C z вибирається, виходячи з критеріїв грубості та стійкості [1, стор. 256]. Оцінювання фази сигналу на вході ФАПЧ x n здійснюють за сигналом помилки ˆ 5 слідкування ~n , використовуючи вираз u Cz Bz ~ ˆ x n un , A z в який підставляються A z і Bz та характеристичний поліном Cz . Відомі поліноми A z , Bz , Cz , S1 z , S 2 z , Mz , Nz підставляються до вибрані поліноми динаміки поліноміального рівняння 10 Az CzNzD 2 zF2 zS 2 z Bz CzMzD 2 zF1 zS 2 z AzMzD1 zF2 zS1 z 0 , (3) яке розв'язується відносно невідомих поліномів D1 z , D 2 z , F1 z , F2 z , Отримані в D1 z явному вигляді, вони визначають передаточні функції регуляторів прямого та D 2 z F z компенсаційного 1 каналів управління ГКН. F2 z 15 20 Таким чином, корисна модель, що пропонується, а саме система ФАПЧ з комбінованим управлінням, імпульсні передаточні функції регуляторів якої вибрані із наведених вище умов, забезпечує підвищення точності слідкування за частотою сигналу на вході системи ФАПЧ за рахунок управління ГКН на основі оцінювання фази сигналу на вході системи ФАПЧ. Заявлений спосіб слідкування за частотою сигналу в системах ФАПЧ і комбінованим управлінням виконують у такій послідовності: 1. Фазу сигналу на вході ФАПЧ порівнюють з фазою вихідного сигналу з ГКН, отримуючи сигнал помилки слідкування. 2. Який потім фільтрують, залишаючи лише низькочастотну складову, за допомогою фільтру, імпульсна передаточна функція якого задається відношенням поліномів 25 S1 z . S 2 z 3. Далі з відфільтрованого сигналу з допомогою регулятора з передаточною функцією D1 z виробляють основний сигнал управління ГКН. D 2 z 4. Одночасно з низькочастотною фільтрацією сигналу помилки слідкування за ним здійснюють оцінювання фази сигналу на вході ФАПЧ, використовуючи вираз ˆ x n 30 35 40 Cz Bz ~ un [2, стор. 418], отримуючи сигнал оцінки. A z 5. З якого за допомогою регулятора з передаточною функцією F1 z і виробляють F2 z компенсаційний сигнал управління ГКН. 6. Потім основний сигнал управління ГКН складають з компенсаційним сигналом управління ГКН, отримуючи сумарний сигнал управління ГКН. 7. Яким, в залежності від величини та полярності сигналу управління, і перестроюють вихідну частоту ГКН. 8. Після цього весь цикл операцій повторюють з самого початку, порівнюючи фазу вхідного сигналу з фазою сигналу з ГКН із скорегованою частотою. Експериментальне підтвердження Для визначення якості функціонування способу, запропонованого в корисній моделі, роботу запропонованої системи ФАПЧ з астатизмом 2-го порядку було порівняно з роботою системи ФАПЧ з комбінованим управлінням, зв'язок по задаючій дії в якій синтезовано із умови підвищення порядку астатизму до 2-го, згідно з найближчим аналогом. 2 UA 93399 U На вхід систем, що порівнювались, подавалась адитивна суміш детермінованого вхідного сигналу, початкове значення піднесучої частоти якого f 0 5 кГц змінювалось зі швидкістю 1 Гц , та "білого шуму" з дисперсією 2 , значення якої відповідали BCШ від 5 до 30 дБ. х с Імпульсні передаточні функції ФНЧ в обох системах, що порівнювались, задавались 5 hF z 1 S1 z k ф 1 е , де k ф - коефіцієнт підсилення ФНЧ, F - частота зрізу ФНЧ S 2 z 1 е hF z 1 при k ф 1 , F 1 кГц, h 0,00001 с. виразом Імпульсні передаточні функції ГКН в обох системах, що порівнювались, задавались виразом Mz k г hz 1 Гц , при k г 796 h 0,00001 с. 1 Nz 1 z В 10 15 Якість роботи систем ФАПЧ порівнювалась за середньою квадратичною помилкою (СКП). З графіків видно, що СКП в системі ФАПЧ, яка працює, згідно із заявленим способом, позначена суцільною лінією, при зміні ВСШ від 30 до 5 дБ в 1,92-3,46 рази менша, ніж СКП в системі ФАПЧ, яка працює, згідно з найближчим аналогом, позначена штриховою лінією. Аналіз представлених результатів показує, що застосування запропонованого способу дає змогу суттєво підвищити точність роботи системи ФАПЧ при низьких ВСШ. Джерела інформації: 1. Зайцев Г.Ф. Теория автоматического управления и регулирования / Г.Ф. Зайцев. - 2-е изд., перераб. и доп. - К.: Выща шк. Головное изд-во, 1989. - 431 с. - ISBN 5-11-000225-8. 2. Пушкарев Ю.А. Основы автоматического управления систем радиоэлектронных средств: [учеб. пособие] / Ю.А. Пушкарев. - Житомир: ЖВУРЭ ПВО, 1991. - 480 с. 20 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 Спосіб слідкування за частотою сигналу в системах ФАПЧ з комбінованим управлінням, згідно з яким фазу сигналу на вході фазового автоматичного підстроювання частоти (ФАПЧ) порівнюють з фазою вихідного сигналу з генератора, що керується напругою (ГКН), отримуючи сигнал помилки слідкування, який потім фільтрують, залишаючи лише низькочастотну складову, далі з відфільтрованого сигналу виробляють основний сигнал управління ГКН, потім основний сигнал управління ГКН складають з компенсаційним сигналом управління ГКН, отримуючи сумарний сигнал управління ГКН, яким і перестроюють вихідну частоту ГКН, після чого весь цикл операцій повторюють з самого початку, який відрізняється тим, що одночасно з низькочастотною фільтрацією сигналу помилки слідкування за ним здійснюють оцінювання фази сигналу на вході ФАПЧ, отримуючи сигнал оцінки, з якого і виробляють компенсаційний сигнал управління ГКН. 3 UA 93399 U Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюVodopian Sergii Vasylovych, Kanevskyi Leonid Bronislavovych
Автори російськоюВодопьян Сергей Васильевич, Каневский Леонид Брониславович
МПК / Мітки
МПК: H03D 13/00, H04L 27/38
Мітки: управлінням, частотою, спосіб, системах, сигналу, слідкування, комбінованим, фапч
Код посилання
<a href="https://ua.patents.su/6-93399-sposib-slidkuvannya-za-chastotoyu-signalu-v-sistemakh-fapch-z-kombinovanim-upravlinnyam.html" target="_blank" rel="follow" title="База патентів України">Спосіб слідкування за частотою сигналу в системах фапч з комбінованим управлінням</a>
Пристрій для автоматичного слідкування за частотою нестаціонарними фільтрами
Номер патенту: 23124
Опубліковано: 10.05.2007
Автор: Туник Володимир Федотович
МПК: H03G 5/16
Мітки: фільтрами, частотою, слідкування, нестаціонарними, пристрій, автоматичного
Формула / Реферат:
1. Пристрій для автоматичного слідкування за частотою нестаціонарними фільтрами (АСНФ), який містить керований фільтр (КФ), петля зворотного зв'язку якого містить послідовно з'єднані частотний дискримінатор (ЧД), згладжуючий фільтр нижніх частот (ФНЧ) і керуючий елемент (КЕ), вихід якого з'єднаний із входом керування КФ, вихід якого, будучи виходом АСНФ, з'єднаний із входом ЧД, який відрізняється тим, що КФ є будь-який з відомих...
Пристрій для автоматичного слідкування за частотою лінійними електричними колами
Номер патенту: 40428
Опубліковано: 10.04.2009
Автор: Туник Володимир Федотович
МПК: G05B 13/02, H03H 21/00
Мітки: пристрій, частотою, слідкування, автоматичного, лінійними, колами, електричними
Формула / Реферат:
1. Пристрій для автоматичного слідкування за частотою (АСЧ) лінійними електричними колами, який містить керований блок (КБ), петля зворотного керування якого містить послідовно з'єднані частотний дискримінатор (ЧД), згладжуючий фільтр нижніх частот (ЗФНЧ) і керуючий елемент (КЕ), вихід якого з'єднаний із входом керування КБ, вихід якого, будучи виходом пристрою АСЧ, з'єднаний із входом ЧД, який відрізняється тим, що КБ являє собою відомі...
Кварцовий генератор з управлінням частотою
Номер патенту: 90589
Опубліковано: 10.06.2014
Автори: Шевченко Микола Якович, Хуторненко Сергій Володимирович, Семенець Дмитро Анатолійович
МПК: H03C 3/00
Мітки: кварцовий, частотою, управлінням, генератор
Формула / Реферат:
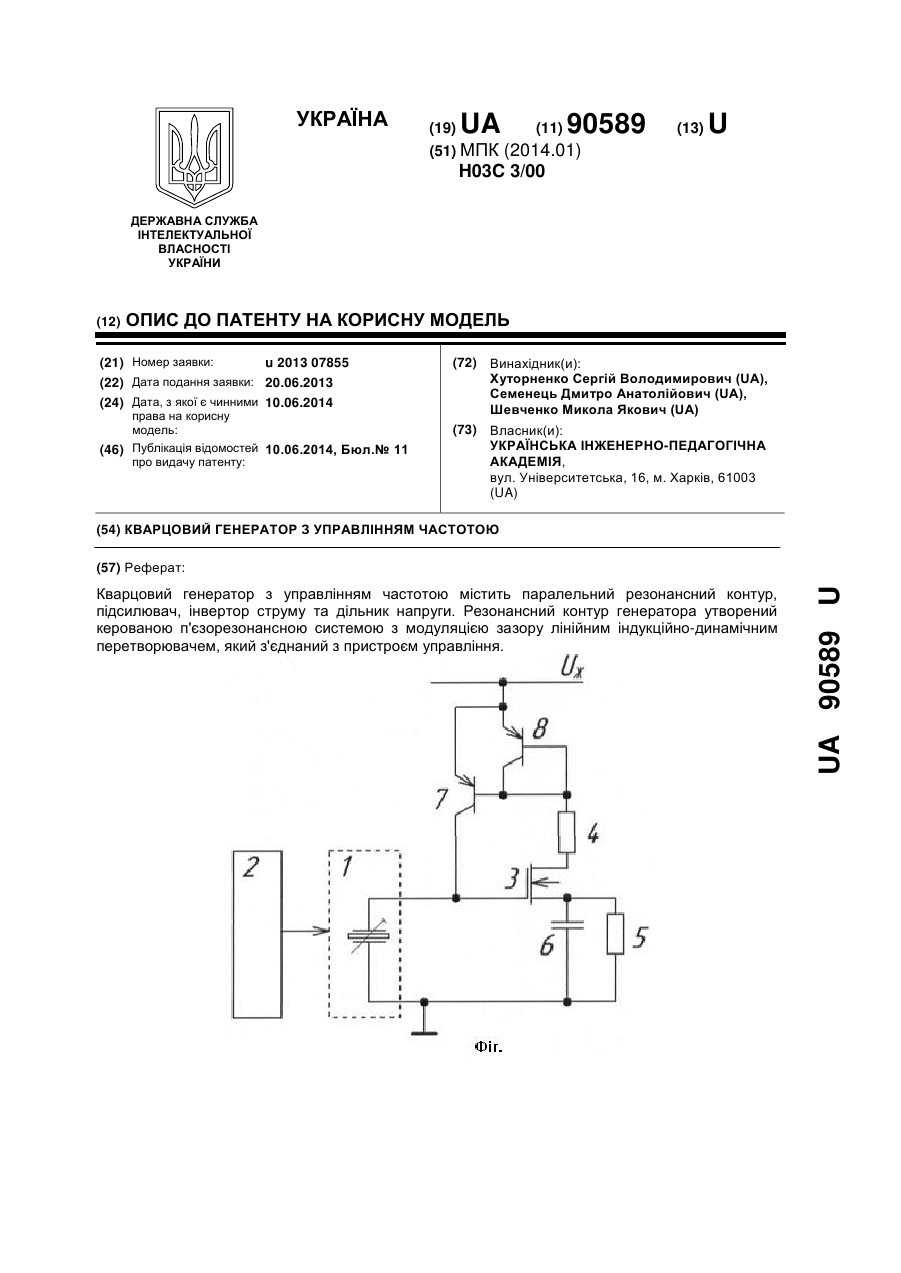
Кварцовий генератор з управлінням частотою, який містить паралельний резонансний контур, підсилювач, інвертор струму та дільник напруги, який відрізняється тим, що резонансний контур генератора утворений керованою п'єзорезонансною системою з модуляцією зазору лінійним індукційно-динамічним перетворювачем, який з'єднаний з пристроєм управління.
Підсилювач потужності з дискретним управлінням рівня вихідного сигналу
Номер патенту: 69344
Опубліковано: 15.09.2005
Автори: Ліпатов Валерій Павлович, Гузь Володимир Іванович, Андрусенко Микола Іванович, Ткаченко Василь Петрович, Сімончук Василь Іванович, Нікітенко Юрій Гордійович
МПК: H03G 3/04
Мітки: дискретним, вихідного, потужності, рівня, сигналу, підсилювач, управлінням
Формула / Реферат:
Підсилювач потужності з дискретним управлінням рівня вихідного сигналу, що містить послідовно з'єднані попередній підсилювач потужності, на вхід якого подається ЧМ-сигнал, атенюатор, вихідний підсилювач потужності, смуговий фільтр, відгалужувач потужності, розв'язуючий пристрій, вихід якого є виходом підсилювача потужності з дискретним управлінням рівня вихідного сигналу, а також містить послідовно з'єднані вимірювач потужності та пристрій...
Спосіб просторово-часової обробки сигналу в системах зв’язку із стрибкоподібною зміною частоти та контрольний приймач для його здійснення
Номер патенту: 95106
Опубліковано: 11.07.2011
Автори: Марчук Артем Володимирович, Гаркуша Сергій Володимирович
МПК: H04B 1/713, H04B 1/62
Мітки: обробки, здійснення, стрибкоподібною, зв'язку, контрольний, приймач, спосіб, системах, просторово-часової, зміною, частоти, сигналу
Формула / Реферат:
1. Спосіб просторово-часової обробки сигналу в системах зв'язку із стрибкоподібною зміною частоти, що включає на передавальному кінці формування пакетів інформації шляхом ділення інформаційного сигналу на блоки заданої довжини, що надходить від джерела інформації, до яких додають "адресу" кореспондента і службову інформацію, перенастроювання несучої частоти передавача на частоту, яка відповідає коду поточного такту однієї з двох...
Попередній патент: Спосіб визначення димоутворювальної здатності твердих будівельних матеріалів
Наступний патент: Спосіб діагностики когнітивних порушень у хворих на гіпертензивну енцефалопатію з використанням змін перфузії
Випадковий патент: Універсальний насос-сифон для транспортування та дозування рідини