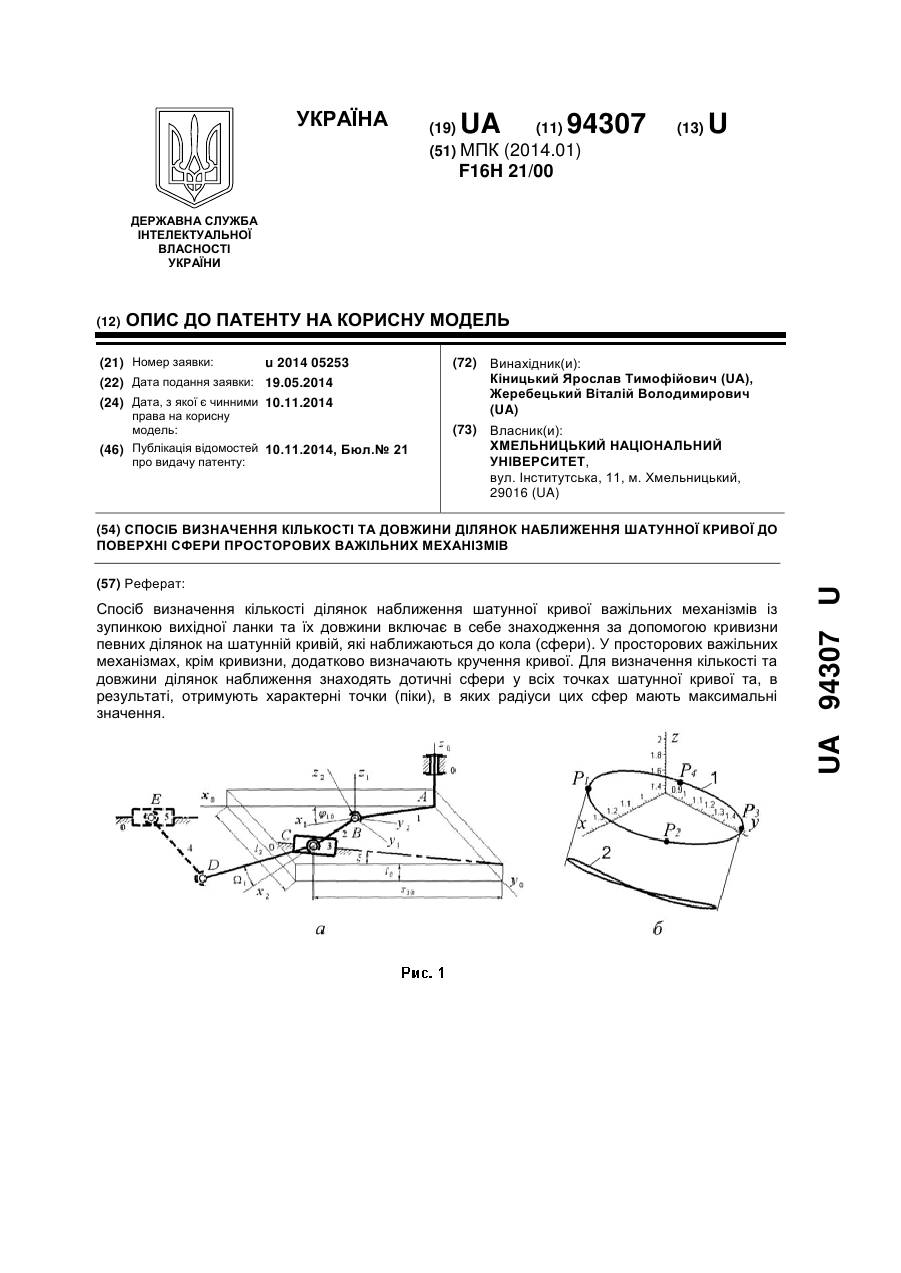
Спосіб визначення кількості та довжини ділянок наближення шатунної кривої до поверхні сфери просторових важільних механізмів
Номер патенту: 94307
Опубліковано: 10.11.2014
Автори: Кіницький Ярослав Тимофійович, Жеребецький Віталій Володимирович

Формула / Реферат
Спосіб визначення кількості ділянок наближення шатунної кривої важільних механізмів із зупинкою вихідної ланки та їх довжини, який включає в себе знаходження за допомогою кривизни певних ділянок на шатунній кривій, які наближаються до кола (сфери), який відрізняється тим, що у просторових важільних механізмах, крім кривизни, додатково визначають кручення кривої, а для визначення кількості та довжини ділянок наближення знаходять дотичні сфери у всіх точках шатунної кривої та, в результаті, отримують характерні точки (піки), в яких радіуси цих сфер мають максимальні значення.
Текст
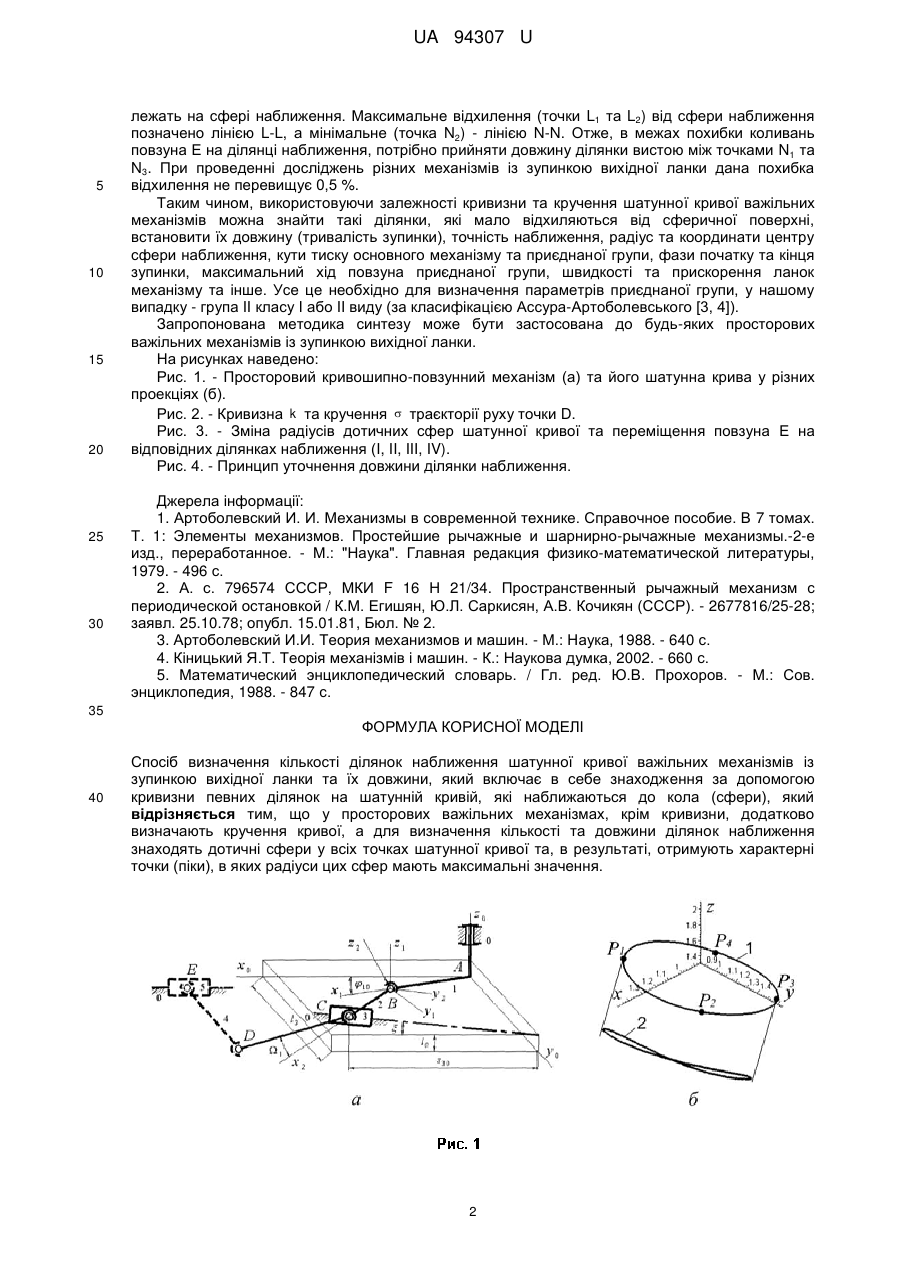
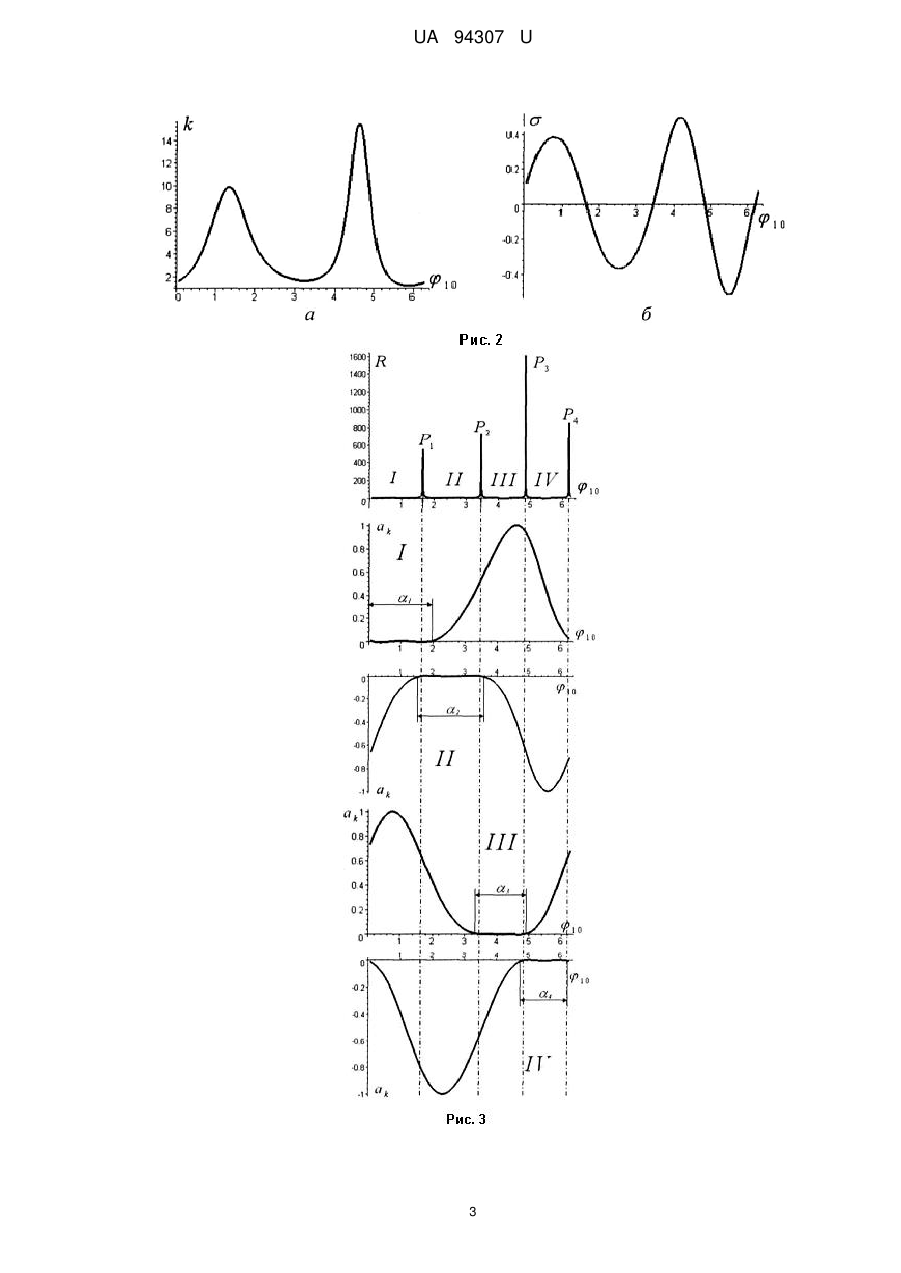
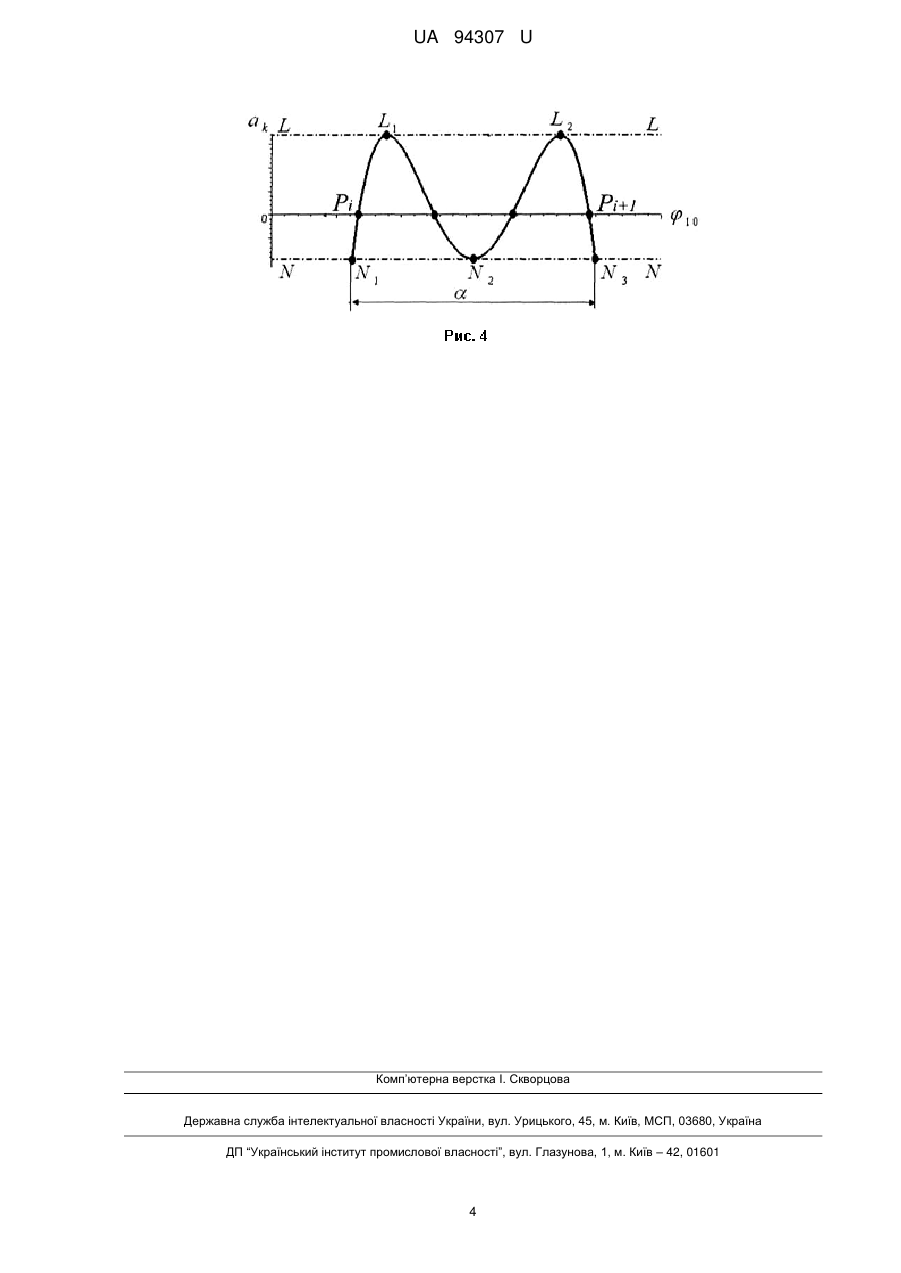
Реферат: Спосіб визначення кількості ділянок наближення шатунної кривої важільних механізмів із зупинкою вихідної ланки та їх довжини включає в себе знаходження за допомогою кривизни певних ділянок на шатунній кривій, які наближаються до кола (сфери). У просторових важільних механізмах, крім кривизни, додатково визначають кручення кривої. Для визначення кількості та довжини ділянок наближення знаходять дотичні сфери у всіх точках шатунної кривої та, в результаті, отримують характерні точки (піки), в яких радіуси цих сфер мають максимальні значення. UA 94307 U (54) СПОСІБ ВИЗНАЧЕННЯ КІЛЬКОСТІ ТА ДОВЖИНИ ДІЛЯНОК НАБЛИЖЕННЯ ШАТУННОЇ КРИВОЇ ДО ПОВЕРХНІ СФЕРИ ПРОСТОРОВИХ ВАЖІЛЬНИХ МЕХАНІЗМІВ UA 94307 U UA 94307 U 5 10 15 20 25 Спосіб належить до машинобудування, а саме до просторових важільних механізмів, в яких необхідно забезпечити рух вихідної ланки з періодичною зупинкою при рівномірному обертанні вхідної ланки. Відомі плоскі важільні механізми із зупинкою вихідної ланки [1, рис. 709-725] та просторові [2], в яких деякі ділянки шатунної кривої наближаються до дуги кола або прямої лінії. Такі механізми складаються з базового напрямного механізму ЕВС [1, рис. 720] (прототип), до якого в точці М приєднується відповідна структурна група MDF. Для визначення кількості ділянок та довжини наближення шатунної кривої до дуги кола або прямої лінії, в основному, використовується лише значення кривизни шатунної кривої [3, 4]. Недоліком такого способу визначення параметрів механізмів є те, що враховується лише кривизна шатунної кривої і не враховується її кручення, якою додатково характеризується шатунні криві більшості просторових важільних механізмів. В основу винаходу поставлена задача визначення кількості ділянок та довжини наближення шатунної кривої до поверхні сфери в просторових важільних механізмах, що дозволяє проектувати різні механізми із зупинкою вихідної ланки. Задача вирішується тим, що у просторових важільних механізмах, крім кривизни, додатково визначають кручення кривої, а для визначення кількості та довжини ділянок наближення знаходять дотичні сфери у всіх точках шатунної кривої та, в результаті, отримують характерні точки (піки), в яких радіуси цих сфер мають максимальні значення. Ці точки ділять шатунну криву механізму на певну кількість ділянок, які можуть бути використані як ділянки наближення, оскільки в їх межах радіус змінюється незначно. Кількість ділянок наближення залежить від геометричних параметрів механізму. Алгоритм реалізації обчислень наступний. 1. Для прикладу виконання вибрано просторовий кривошипно-повзунний механізм (рис. 1, а). Для знаходження координат руху точки D, потрібно спочатку визначити положення всіх ланок механізму при заданих значеннях узагальненої координати 10 і параметрах кінематичної схеми: l0 ,l1 l AB ,l2 lBC ,l3 ,l lCD, , 1, 2 , де - кут між лінією руху повзуна 3 і площиною x 0 Ay 0 ; 1 - кут між абсцисою Вх та ланкою CD; 2 - кут між площиною x Bz і площиною, яка 2 2 2 30 35 , , проходить через точки В, С та D. Приймемо l 15,l0 0,2,l1 0,25,l2 1 l3 0,5, / 4, 1 0, 2 0 . Всі розміри подано у відносних величинах, де за модуль довжини прийнято довжину шатуна ВС. 2. Визначається шатуна крива (траєкторія точки D) даного механізму (рис. 1, б). Це можна зробити, наприклад, за допомогою комп'ютерної системи SolidWorks і підпрограми CosmosMotion. Для покращення сприйняття просторової кривої на рисунку вона подана у двох проекціях (1 і 2). 3. Згідно з [5, с 301, 304], за наступними формулами (1), знаходяться кривизна k та кручення траєкторії руху точки D (рис. 2, а та б відповідно). , lim s s , (1) s де та - гострі кути між дотичними лініями та площинами відповідно; s - переміщення k lim s 40 шатуна при зміні положення кривошипа 10 . 4. Формула для знаходження радіуса дотичної сфери має вигляд [5, с. 553]: 2 R 2 45 50 1 d 2 ds , (2) де - радіус кривизни кривої 1/ k . Використовуючи формулу (2) визначаються радіуси дотичних сфер точок шатунної кривої (рис. 3). 5. Знайшовши максимуми радіусів (у даному випадку це точки Р1, Р2, Р3 та Р4), розбиваємо шатуну криву на чотири ділянки (рис. 3). Ці ділянки можна наблизити до сфер певних радіусів і за допомогою приєднання до механізму ланок 4 (довжина визначається радіусом сфери наближення) та 5 (повзун повинен рухатися по лінії від центру сфери наближення до середини ділянки наближення) отримати механізми із зупинкою вихідної ланки, тривалість яких визначається кутами 1, 2 , 3 , 4 . На даному рисунку k це інваріант переміщень повзуна Е. 6. Як видно з рис. 3, довжини ділянок наближення виходять за межі точок максимумів радіусів. Це пояснюється незначним відхиленням шатунної кривої від поверхні сфери наближення (рис. 4). Як показано на рисунку, точки {Рі та Рі+1), які відповідають пікам радіусів, 1 UA 94307 U 5 10 15 20 25 30 лежать на сфері наближення. Максимальне відхилення (точки L1 та L2) від сфери наближення позначено лінією L-L, а мінімальне (точка N2) - лінією N-N. Отже, в межах похибки коливань повзуна Е на ділянці наближення, потрібно прийняти довжину ділянки вистою між точками N1 та N3. При проведенні досліджень різних механізмів із зупинкою вихідної ланки дана похибка відхилення не перевищує 0,5 %. Таким чином, використовуючи залежності кривизни та кручення шатунної кривої важільних механізмів можна знайти такі ділянки, які мало відхиляються від сферичної поверхні, встановити їх довжину (тривалість зупинки), точність наближення, радіус та координати центру сфери наближення, кути тиску основного механізму та приєднаної групи, фази початку та кінця зупинки, максимальний хід повзуна приєднаної групи, швидкості та прискорення ланок механізму та інше. Усе це необхідно для визначення параметрів приєднаної групи, у нашому випадку - група II класу I або II виду (за класифікацією Ассура-Артоболевського [3, 4]). Запропонована методика синтезу може бути застосована до будь-яких просторових важільних механізмів із зупинкою вихідної ланки. На рисунках наведено: Рис. 1. - Просторовий кривошипно-повзунний механізм (а) та його шатунна крива у різних проекціях (б). Рис. 2. - Кривизна k та кручення траєкторії руху точки D. Рис. 3. - Зміна радіусів дотичних сфер шатунної кривої та переміщення повзуна Е на відповідних ділянках наближення (I, II, III, IV). Рис. 4. - Принцип уточнення довжини ділянки наближення. Джерела інформації: 1. Артоболевский И. И. Механизмы в современной технике. Справочное пособие. В 7 томах. Т. 1: Элементы механизмов. Простейшие рычажные и шарнирно-рычажные механизмы.-2-е изд., переработанное. - М.: "Наука". Главная редакция физико-математической литературы, 1979. - 496 с. 2. А. с. 796574 СССР, МКИ F 16 Н 21/34. Пространственный рычажный механизм с периодической остановкой / К.М. Егишян, Ю.Л. Саркисян, А.В. Кочикян (СССР). - 2677816/25-28; заявл. 25.10.78; опубл. 15.01.81, Бюл. № 2. 3. Артоболевский И.И. Теория механизмов и машин. - М.: Наука, 1988. - 640 с. 4. Кіницький Я.Т. Теорія механізмів і машин. - К.: Наукова думка, 2002. - 660 с. 5. Математический энциклопедический словарь. / Гл. ред. Ю.В. Прохоров. - М.: Сов. энциклопедия, 1988. - 847 с. 35 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 Спосіб визначення кількості ділянок наближення шатунної кривої важільних механізмів із зупинкою вихідної ланки та їх довжини, який включає в себе знаходження за допомогою кривизни певних ділянок на шатунній кривій, які наближаються до кола (сфери), який відрізняється тим, що у просторових важільних механізмах, крім кривизни, додатково визначають кручення кривої, а для визначення кількості та довжини ділянок наближення знаходять дотичні сфери у всіх точках шатунної кривої та, в результаті, отримують характерні точки (піки), в яких радіуси цих сфер мають максимальні значення. 2 UA 94307 U 3 UA 94307 U Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: F16H 21/00
Мітки: спосіб, важільних, шатунної, визначення, сфери, просторових, кількості, механізмів, кривої, наближення, поверхні, довжини, ділянок
Код посилання
<a href="https://ua.patents.su/6-94307-sposib-viznachennya-kilkosti-ta-dovzhini-dilyanok-nablizhennya-shatunno-krivo-do-poverkhni-sferi-prostorovikh-vazhilnikh-mekhanizmiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення кількості та довжини ділянок наближення шатунної кривої до поверхні сфери просторових важільних механізмів</a>
Спосіб визначення можливих просторових зміщень земної поверхні вугільних шахт в часі
Номер патенту: 18507
Опубліковано: 15.11.2006
Автори: Кисельов Микола Миколайович, Кучук Віталій Федорович, Філатов Валерій Федорович, Шевченко Евген Миколайович
МПК: E02D 31/00
Мітки: земної, вугільних, просторових, визначення, поверхні, можливих, шахт, спосіб, зміщень, часі
Формула / Реферат:
Спосіб визначення можливих просторових зміщень земної поверхні вугільних шахт в часі, що включає закладення ліній ґрунтових реперів, аналіз вихідних даних умов відпрацювання вугільного родовища і даних раніше проведених спостережень за осіданням земної поверхні досліджуваної і сусідніх шахт і підготовку растрової основи планів гірничих робіт згідно з етапами: перший етап - сканування за допомогою сканувального пристрою окремих фрагментів,...
Спосіб визначення можливих просторових зміщень земної поверхні вугільних шахт
Номер патенту: 11537
Опубліковано: 15.12.2005
Автори: Анциферов Андрій Вадимович, Гавриленко Юрій Миколайович, Кисельов Микола Миколайович, Філатов Валерій Федорович
МПК: E02D 31/00
Мітки: шахт, можливих, просторових, земної, вугільних, спосіб, поверхні, визначення, зміщень
Формула / Реферат:
1. Спосіб визначення можливих просторових зміщень земної поверхні вугільних шахт, що включає закладання ліній ґрунтових реперів, який відрізняється тим, що включає аналіз вихідних даних умов відпрацювання вугільного родовища і даних раніше проведених спостережень за осіданням земної поверхні досліджуваної і сусідніх шахт і підготовку растрової основи планів гірничих робіт згідно з етапами: перший етап - сканування за допомогою скандувального...
Спосіб визначення необхідної кількості кістковопластичного матеріалу для проведення реконструкції атрофованих ділянок альвеолярних гребенів щелеп на ділянці адентії
Номер патенту: 43803
Опубліковано: 25.08.2009
Автори: Новицький Володимир Борисович, Сенніков Олег Миколаєвич, Карий Володимир Іванович, Прийма Андрій Олександрович
МПК: G09B 23/28
Мітки: альвеолярних, щелеп, ділянок, спосіб, проведення, гребенів, кістковопластичного, ділянці, необхідної, матеріалу, атрофованих, визначення, адентії, реконструкції, кількості
Формула / Реферат:
Спосіб визначення необхідної кількості кістковопластичного матеріалу для проведення реконструкції атрофованих ділянок альвеолярних гребенів щелеп на ділянці адентії, за яким пацієнту знімають відбиток з досліджуваної щелепи, відливають модель і після кристалізації гіпсу на ділянку адентії наносять пластичний матеріал і моделюють відсутню частину альвеолярного гребеня у відповідності до анатомічної, після чого отриману композицію неправильної...
Пристрій для визначення і контролю конфігурації об’ємних ділянок одягу
Номер патенту: 39404
Опубліковано: 15.06.2001
Автор: Кущевський Микола Олександрович
МПК: A41H 43/00, G01B 13/00
Мітки: одягу, контролю, конфігурації, пристрій, визначення, об'ємних, ділянок
Формула / Реферат:
Пристрій для визначення і контролю конфігурації об'ємних ділянок одягу, який складається із проекційної лампи, конденсора, об'єктива, предметного столика і екрана, який відрізняється тим, що пристрій містить кроковий шукач, на якому встановлений предметний столик, при цьому кроковий шукач виконаний з можливістю повороту відносно своєї осі з визначеним кроком та можливістю вимірювання кривизни в різних перетинах.
Спосіб визначення просторових координат центра проекції знімальної камери
Номер патенту: 78826
Опубліковано: 25.04.2007
Автор: Глотов Володимир Миколайович
МПК: G01C 11/00
Мітки: знімальної, визначення, центра, просторових, спосіб, координат, камери, проекції
Формула / Реферат:
Спосіб визначення просторових координат центра проекції знімальної камери, який полягає в тому, що на земній поверхні в районі знімання встановлюють GPS-приймач, а на борту рухомого об'єкта встановлюють знімальну камеру і бортовий GPS-приймач, з'єднують їх між собою, приймають сигнали з бортового GPS-приймача і керують знімальною камерою, який відрізняється тим, що попередньо на бортовому GPS-приймачі встановлюють епохи, які відповідають...
Попередній патент: Стаканчик для приготування напою
Наступний патент: Система автоматичного управління літаком при заході на посадку
Випадковий патент: Спосіб отримання біоптату з тканин щелепи