Система автоматичного управління літаком при заході на посадку
Номер патенту: 94308
Опубліковано: 10.11.2014
Автори: Хлівнюк Ванда Олександрівна, Субота Анатолій Максимович, Симонов Володимир Федорович

Формула / Реферат
Система автоматичного управління літаком при заході на посадку, що містить у своєму складі антену, яка з'єднана з входом курсового радіоприймача, вихід якого з'єднаний з першим входом блока формування кута знесення, вихід якого з'єднаний з першим входом суматора, вихід якого через блок формування заданого кута крену з'єднаний з входом сервопривода вертикальної стрілки пілотажного приладу, вихід якого з'єднаний з входом індикатора пілотажного приладу, курсову систему, вихід якої з'єднаний з другим входом блока формування кута знесення, другим входом суматора та першим входом блока формування сигналу управління рисканням, центральну гіроскопічну вертикаль, вихід якої з'єднаний з третім входом суматора і першим входом блока формування сигналу управління креном, датчик кутової швидкості крену, вихід якого з'єднаний з другим входом блока формування сигналу управління креном, вихід якого з'єднаний з сервоприводом елеронів, датчик кутової швидкості рискання, вихід якого з'єднаний з другим входом блока формування сигналу управління рисканням, вихід якого з'єднаний з сервоприводом руля рискання, треті входи блоків формування сигналу управління креном та формування сигналу управління рисканням з'єднані з виходом блока формування заданого кута крену, яка відрізняється тим, що в неї введено перший і другий блоки діагностики, перший вхід першого блока діагностики з'єднаний з виходом датчика кутової швидкості крену, а другий вхід з'єднаний з виходом центральної гіроскопічної вертикалі, вихід першого блока діагностики з'єднаний з четвертим входом блока формування сигналу управління креном, перший вхід другого блока діагностики з'єднаний з виходом датчика кутової швидкості рисканням, другий вхід з'єднаний з виходом курсової системи, а вихід другого блока діагностики з'єднаний з четвертим входом блока формування сигналу управління рисканням.
Текст
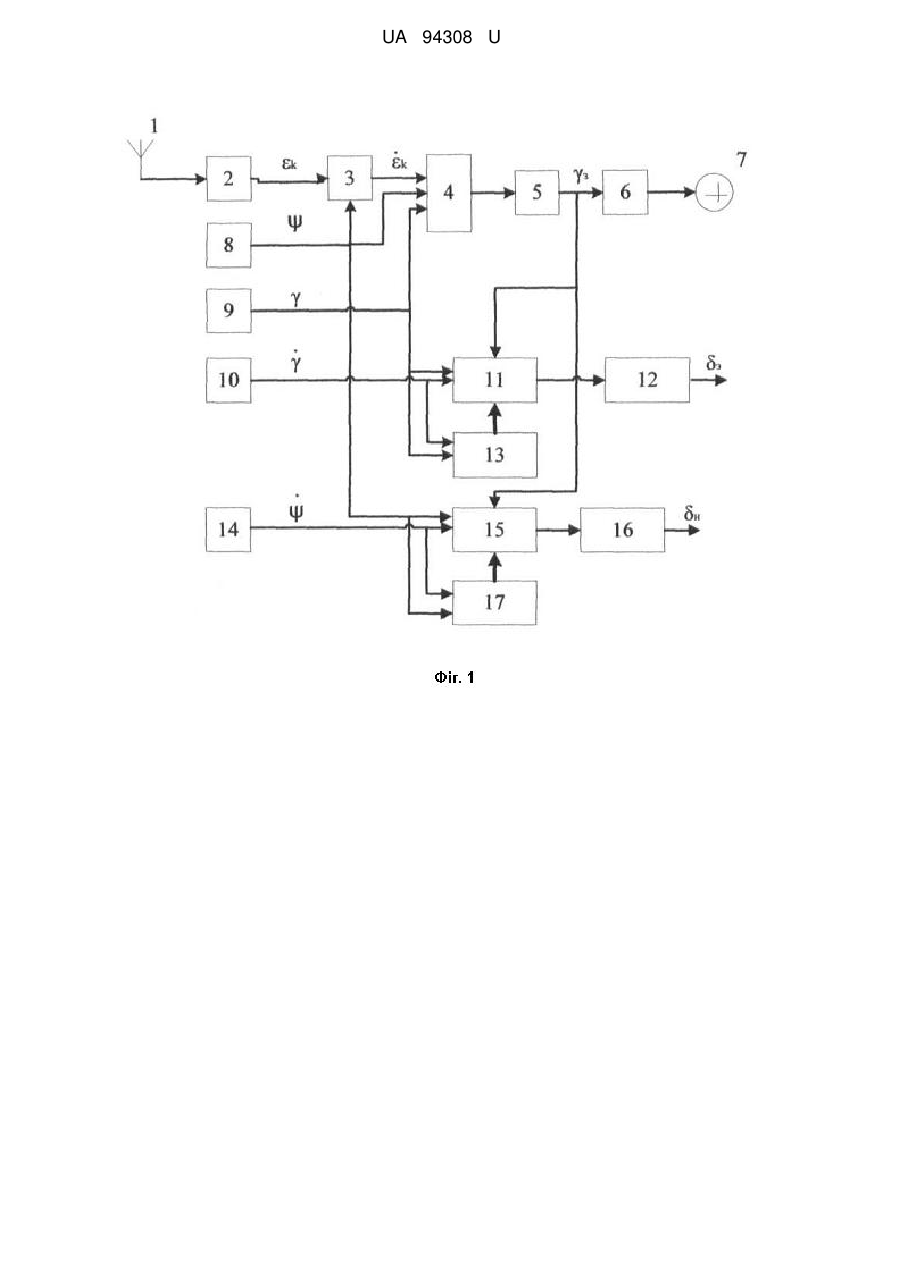
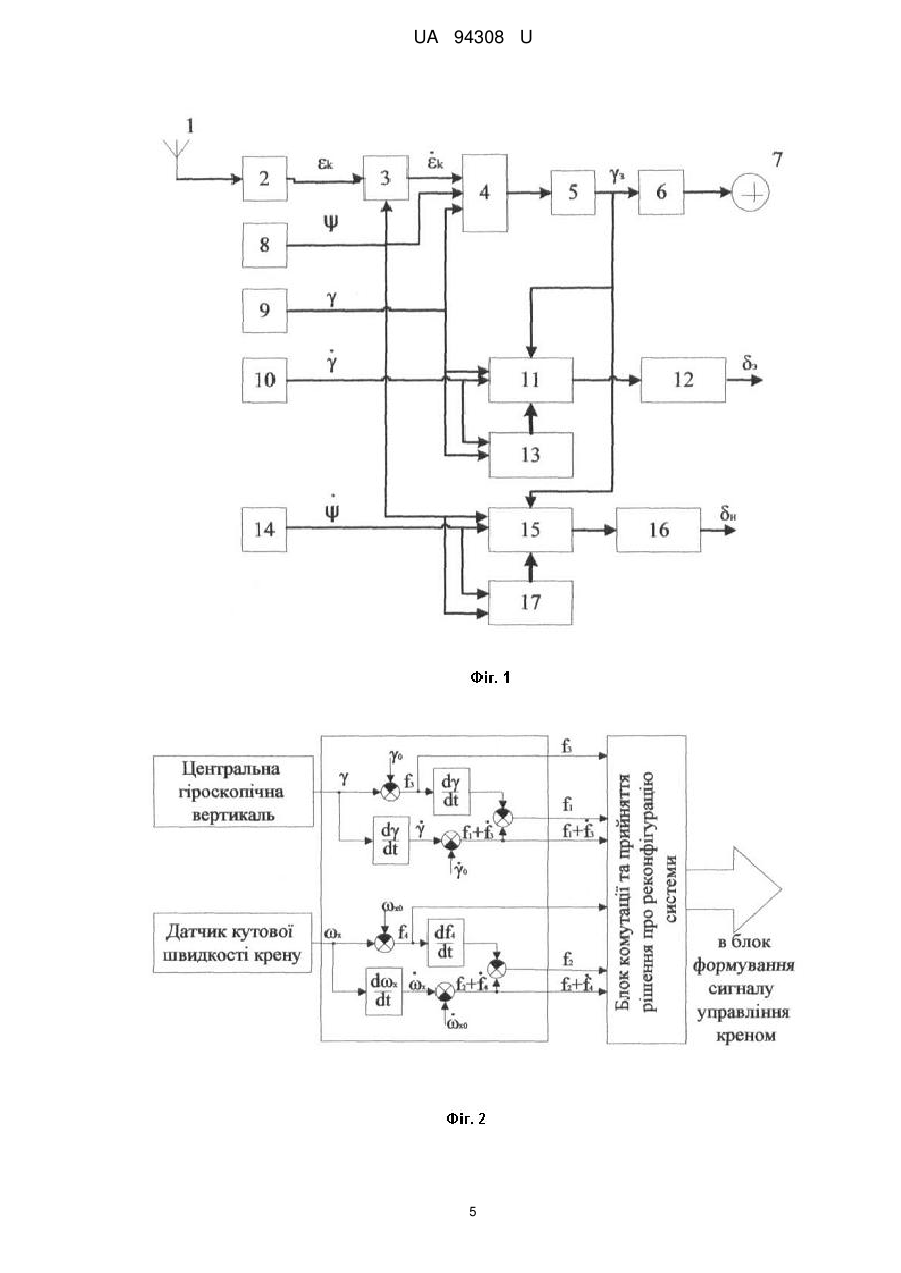
Реферат: UA 94308 U UA 94308 U 5 10 15 20 25 30 35 40 45 50 55 60 Запропонована корисна модель належить до області автоматичного управління літаком при заході на посадку. Відома система автоматичного управління літаком при заході на посадку, яка у своєму складі має радіоприймач, суматори, датчики кутів та кутової швидкості, а також масштабні блоки і вихід на привод руля висоти (Патент РФ, № 2330792, МПК В64С13/16). Недоліком такої системи є низька надійність у випадку відмови датчика кута або кутової швидкості. Найбільш близькою до запропонованої є система автоматичного управління літаком при заході на посадку, яка у своєму складі має антену, яка з'єднана з входом курсового радіоприймача, вихід якого з'єднаний з першим входом блока формування кута знесення, вихід якого з'єднаний з першим входом суматора, вихід якого через блок формування заданого кута крену з'єднаний з входом сервопривода вертикальної стрілки пілотажного приладу, вихід якого з'єднаний з входом індикатора пілотажного приладу, курсову систему, вихід якої з'єднаний з другим входом блока формування кута знесення, другим входом суматора та першим входом блока формування сигналу управління рисканням, центральну гіроскопічну вертикаль, вихід якої з'єднаний з третім входом суматора і першим входом блока формування сигналу управління креном, датчик кутової швидкості крену, вихід якого з'єднаний з другим входом блока формування сигналу управління креном, вихід якого з'єднаний з сервоприводом елеронів, датчик кутової швидкості рискання, вихід якого з'єднаний з другим входом блока формування сигналу управління рисканням, вихід якого з'єднаний з сервоприводом руля рискання, треті входи блоків формування сигналу управління креном та формування сигналу управління рисканням з'єднані з виходом блока формування заданого кута крену (Ю.И. Кириленко. Руководство к лабораторным работам по автоматическим системам управления полетом летательных аппаратов / Ю.И. Кириленко, Ю.Н. Смирнов, Г.И. Федоренко, В.В. Павлов, О.А. Бабич. Под ред. М.С. Козлова. - Издание ВВИА им. проф. Н.Е. Жуковского, 1962 - 176 с., стр. 126, фиг. 9.5). Недоліком такої системи є низька надійність у випадку відмови датчика кута або кутової швидкості кожного з каналів (крену та рискання). В основу корисної моделі поставлена задача підвищення відмовостійкості системи автоматичного управління літаком при заході на посадку в боковому русі. Поставлена задача вирішується завдяки тому, що в систему автоматичного управління літаком при заході на посадку, що має антену, яка з'єднана з входом курсового радіоприймача, вихід якого з'єднаний з першим входом блока формування кута знесення, вихід якого з'єднаний з першим входом суматора, вихід якого через блок формування заданого кута крену з'єднаний з входом сервопривода вертикальної стрілки пілотажного приладу, вихід якого з'єднаний з входом індикатора пілотажного приладу, курсову систему, вихід якої з'єднаний з другим входом блока формування кута знесення, другим входом суматора та першим входом блока формування сигналу управління рисканням, центральну гіроскопічну вертикаль, вихід якої з'єднаний з третім входом суматора і першим входом блока формування сигналу управління креном, датчик кутової швидкості крену, вихід якого з'єднаний з другим входом блока формування сигналу управління креном, вихід якого з'єднаний з сервоприводом елеронів, датчик кутової швидкості рискання, вихід якого з'єднаний з другим входом блока формування сигналу управління рисканням, вихід якого з'єднаний з сервоприводом руля рискання, треті входи блоків формування сигналу управління креном та формування сигналу управління рисканням з'єднані з виходом блока формування заданого кута крену, відповідно до корисної моделі в неї введено перший та другий блоки діагностики, перший вхід першого блока діагностики з'єднаний з виходом датчика кутової швидкості крену, а другий вхід з'єднаний з виходом центральної гіроскопічної вертикалі, вихід першого блока діагностики з'єднаний з четвертим входом блока формування сигналу управління креном, перший вхід другого блока діагностики з'єднаний з виходом датчика кутової швидкості рисканням, другий вхід з'єднаний з виходом курсової системи, а вихід другого блока діагностики з'єднаний з четвертим входом блоку формування сигналу управління рисканням. На фіг. 1 зображена загальна функціональна схема системи автоматичного управління літаком при заході на посадку. На фіг. 2 зображено алгоритм функціонування першого блока діагностики. На фіг. 1 позначено: 1 - антена, 2 - курсовий радіоприймач, 3 - блок формування кута знесення, 4 - суматор, 5 - блок формування заданого кута крену, 6 - сервопривод вертикальної стрілки пілотажного приладу, 7 - індикатор пілотажного приладу, 8 - курсова система, 9 центральна гіроскопічна вертикаль, 10 - датчик кутової швидкості крену, 11 - блок формування сигналу управління креном, 12 - сервопривод елеронів, 13 - перший блок діагностики, 14 1 UA 94308 U 5 10 15 20 25 датчик кутової швидкості рискання, 15 - блок формування сигналу управління рисканням, 16 сервопривод руля рискання, 17 - другий блок діагностики. Антена 1 знаходиться на борту літака і з'єднана з входом курсового радіоприймача 2. Вихід курсового радіоприймача 2 з'єднаний з входом блока формування кута знесення 3, який також з'єднаний з виходом курсової системи 8. Вихід блока формування кута знесення 3, вихід курсової системи 8, вихід центральної гіроскопічної вертикалі 9 з'єднані з входами суматора 4. Вихід суматора 4 через блок формування заданого кута крену 5 з'єднаний з входом сервопривода вертикальної стрілки пілотажного приладу 6, який через механічну передачу з'єднаний з індикатором пілотажного приладу 7. Входи блока формування сигналу управління креном 11 відповідно з'єднані з виходами центральної гіроскопічної вертикалі 9, блока формування заданого кута крену 5, датчика кутової швидкості крену 10, а також з виходом першого блока діагностики 13. Виходи першого блока діагностики 13 з'єднані з виходами центральної гіроскопічної вертикалі 9 та датчика кутової швидкості крену 10. Вихід блока формування сигналу управління креном 11 з'єднаний з входом сервопривода елеронів 12. Входи блока формування сигналу управління рисканням 15 відповідно з'єднані з виходами курсової системи 8, датчика кутової швидкості рискання 14, блока формування заданого кута крену 5, а також з виходом другого блока діагностики 17. Виходи другого блока діагностики 17 з'єднані з виходами курсової системи 8 та датчика кутової швидкості рискання 14. Вихід блока формування сигналу управління рисканням 15 з'єднаний з входом сервопривода руля рискання 16. Система автоматичного управління літаком при заході на посадку працює наступним чином. Сигнал, сформований наземним курсовим радіомаяком (КРМ), приймається антеною 1, що знаходиться на борту літака. Цей сигнал надходить на вхід курсового радіоприймача 2 (КРП), який на своєму виході формує сигнал к відхилення літака від рівносигнальної зони КРМ, що співпадає з поздовжньою віссю злітно-посадкової смуги. Сигнал к та сигнал з курсової системи 8 поступають на вхід блока формування кута знесення 3, що необхідно для компенсування збурюючої дії вітру. Далі похідна сигналу кута знесення ( к ) підсумовується в суматорі 4 з вихідним сигналом курсової системи ( ) та вихідним сигналом центральної 30 гіроскопічної вертикали ( ) і надходить в блок 5 формування заданого кута крену ( з ) у відповідності до наступного співвідношення: 1 1 K к K , (1) K к K K T2 s 1 T1s 1 де K , K , K , K - постійні коефіцієнти; з 35 T1 , T2 - сталі часу фільтрів. Сформований таким чином сигнал з подається на сервопривод 6 вертикальної стрілки і далі на індикатор пілотажного приладу 7, а також на сервопривода 12 і 16 відповідав елеронів та руля рискання через блок 11 формування сигналу управління креном і 15 - блок формування сигналу управління рисканням згідно з законами: э K э з K э , (2) н K н з K н , 40 45 50 де K н , K э , K э , K н - постійні коефіцієнти. При цьому алгоритми функціонування системи згідно з законами (2) здійснюються при умові, що в системах управління креном та рисканням відсутні відмови у функціонуванні вимірювальних приладів і систем. Якщо, наприклад, перший блок діагностики 13 ідентифікував відмову у функціонуванні центральної гіроскопічної вертикалі 9 або датчика кутової швидкості крену 10, то алгоритм функціонування блока 11 формування сигналу управління креном буде відповідно змінений. Аналогічно працює і другий блок діагностики 17 при відмові курсової системи 8 або датчика кутової швидкості рискання 14. Оскільки принципи функціонування блоків діагностики ідентичні, то принцип дії першого і другого блоків діагностики 13 і 17 розглянемо на прикладі першого блока діагностики 13. Цей блок відповідає за аналіз функціонування каналу крену літака. Рівняння, що описує рух літака за кутом крену може бути представлено у наступному вигляді (В.А. Боднер, Системы управления летательными аппаратами. - М. Машиностроение, 1973 г., 504 стр.): s2 n22 s nэ э , (3) 2 UA 94308 U де n22 і n э - постійні коефіцієнти, э K з K s - закон управління. (4) Для опису динаміки літака у просторі стану сумісне рішення рівнянь (3) і (4) можна записати так 5 10 a2 a1 u , (5) де a1 n22 nэK , a 2 nэK , u a2 з . Введемо наступні змінні вектора стану x1 ; (6) x 2 x . Тоді рівняння стану і виходу можуть бути представлені таким чином: x1 x 2 ; (7) x 2 a 2 x1 a1x 2 u; y1 x1; . (8) y 2 x 2 . При наявності відмови в системі рівняння (7) і (8) запишемо так: x1 x 2 f1; (9) x 2 a 2 x1 a1x 2 u f2 ; y 1 x 1 f3 ; (10) y 2 x 2 f4 , 15 де f f1, f2 , f3 , f4 T - вектор відмови, fi , i 1,4 - складові вектора відмови. Знайдемо похідні складових змінних виходу, і підставимо у складові змінних стану, і запишемо здобуті вирази у такому вигляді: 20 25 Y1 x1 f3 ; Y x f ; 2 4 2 (11) Y1 x 2 f1 f3 ; Y a x a x u f f . 2 2 1 1 2 2 4 При відсутності відмов система рівнянь (11) приймає наступний вигляд: Y10 x1; Y x ; 2 20 (12) Y10 x 2 ; Y a x a x u. 20 2 1 1 2 Далі запишемо різницю між виразами (11) і (12): Y1 Y10 f3 Y Y f 4 2 20 (13) Y Y Y f f 10 1 1 3 Y2 Y20 f2 f4 Ураховуючи наявність датчиків кута крену у центральній гіроскопічній вертикалі - ЦГВ та кутової швидкості x , систему (13) можна записати таким чином: 0 f3 f x x 0 4 x . (14) Y 0 f1 f3 x x 0 f f x 2 4 На базі рівнянь системи (14) алгоритм функціонування першого блока діагностики (13) каналу крену системи автоматичного управління літаком при заході на посадку може бути представлений у наступному вигляді (фіг. 2). Як видно з фіг. 2, задачею блока діагностики є 3 UA 94308 U 5 10 15 ідентифікація складових вектора відмов fi , i 1,4 . Так, наприклад, якщо складова f3 протягом деякого часу при зміні кута крену дорівнює нулю ( f3 0 або f1 f3 0 ), то це означає, що датчик кута крену (ЦГВ) вийшов з ладу, і щоб здобути інформацію про значення кута крену, потрібно взяти вихідний сигнал датчика кутової швидкості (ДУС) і його проінтегрувати і навпаки, якщо вийшов з ладу датчик кутової швидкості, то це означає, що складові f4 0 і f2 f4 0 , і щоб здобути інформацію про значення кутової швидкості x , необхідно продиференціювати вихідний сигнал датчика кута крену, тобто ЦГВ. Аналогічно за вихідними сигналами блока діагностики блок комутації та прийняття рішення про реконфігурацію системи після відповідного аналізу, виконує зміну алгоритмів і конфігурацію системи і при інших видах відмов (дрейфах датчиків, змін їх крутизни вихідних сигналів і так далі). Такі ж задачі вирішує і другий блок діагностики у відношенні до каналу рискання. Таким чином, поставлена задача підвищення відмовостійкості системи автоматичного управління літаком при заході на посадку в боковому русі повністю вирішується за допомогою наявності в системі блоків діагностики, які вирішують задачі ідентифікації і локалізації відмов окремих функціональних елементів системи. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 20 25 30 35 Система автоматичного управління літаком при заході на посадку, що містить у своєму складі антену, яка з'єднана з входом курсового радіоприймача, вихід якого з'єднаний з першим входом блока формування кута знесення, вихід якого з'єднаний з першим входом суматора, вихід якого через блок формування заданого кута крену з'єднаний з входом сервопривода вертикальної стрілки пілотажного приладу, вихід якого з'єднаний з входом індикатора пілотажного приладу, курсову систему, вихід якої з'єднаний з другим входом блока формування кута знесення, другим входом суматора та першим входом блока формування сигналу управління рисканням, центральну гіроскопічну вертикаль, вихід якої з'єднаний з третім входом суматора і першим входом блока формування сигналу управління креном, датчик кутової швидкості крену, вихід якого з'єднаний з другим входом блока формування сигналу управління креном, вихід якого з'єднаний з сервоприводом елеронів, датчик кутової швидкості рискання, вихід якого з'єднаний з другим входом блока формування сигналу управління рисканням, вихід якого з'єднаний з сервоприводом руля рискання, треті входи блоків формування сигналу управління креном та формування сигналу управління рисканням з'єднані з виходом блока формування заданого кута крену, яка відрізняється тим, що в неї введено перший і другий блоки діагностики, перший вхід першого блока діагностики з'єднаний з виходом датчика кутової швидкості крену, а другий вхід з'єднаний з виходом центральної гіроскопічної вертикалі, вихід першого блока діагностики з'єднаний з четвертим входом блока формування сигналу управління креном, перший вхід другого блока діагностики з'єднаний з виходом датчика кутової швидкості рисканням, другий вхід з'єднаний з виходом курсової системи, а вихід другого блока діагностики з'єднаний з четвертим входом блока формування сигналу управління рисканням. 4 UA 94308 U 5 UA 94308 U Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Автори англійськоюSubota Anatolii Maksymovych, Symonov Volodymyr Fedorovych
Автори російськоюСуббота Анатолий Максимович, Симонов Владимир Федорович
МПК / Мітки
МПК: B64C 13/16
Мітки: літаком, заході, система, автоматичного, управління, посадку
Код посилання
<a href="https://ua.patents.su/8-94308-sistema-avtomatichnogo-upravlinnya-litakom-pri-zakhodi-na-posadku.html" target="_blank" rel="follow" title="База патентів України">Система автоматичного управління літаком при заході на посадку</a>
Адаптивна система управління швидкістю обертання турбіни
Номер патенту: 78888
Опубліковано: 10.04.2013
Автори: Симонов Володимир Федорович, Гусєва Альона Олегівна
МПК: F03B 15/00
Мітки: швидкістю, обертання, турбіни, управління, система, адаптивна
Формула / Реферат:
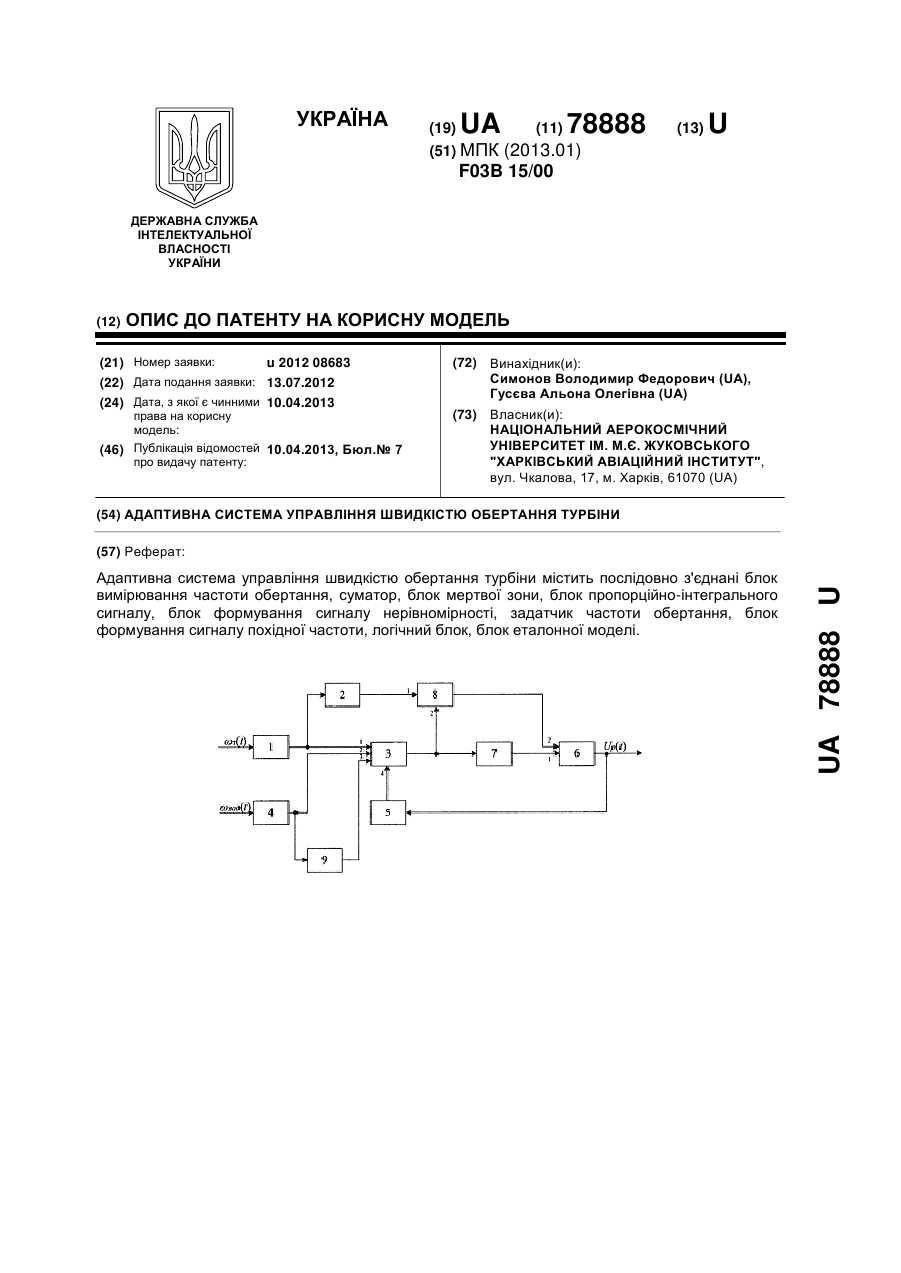
Адаптивна система управління швидкістю обертання турбіни, що містить послідовно з'єднані блок вимірювання частоти обертання, суматор, блок мертвої зони, блок пропорційно-інтегрального сигналу, блок формування сигналу нерівномірності, вихід якого з'єднаний з четвертим входом суматора, а також задатчик частоти обертання, вихід якого з'єднаний з другим входом суматора, блок формування сигналу похідної частоти, вхід якого з'єднаний з виходом...
Система автоматичного управління розподілом газових бульбашок за розміром у процесі флотації
Номер патенту: 92180
Опубліковано: 11.08.2014
Автор: Пікільняк Андрій Валерійович
МПК: B01D 53/00
Мітки: управління, система, розподілом, бульбашок, автоматичного, процесі, флотації, газових, розміром
Формула / Реферат:
Система автоматичного управління розподілом газових бульбашок за розмірами в процесі флотації, що включає блок обчислювального пристрою, вихід якого з'єднаний з входом блока регулюючого пристрою, вихід регулюючого пристрою з'єднаний з входом блока розподілювача, яка відрізняється тим, що в систему введений блок датчика гранулометричного складу і блок формувача управляючого впливу, причому вихід блока датчика гранулометричного складу...
Система автоматичного управління паркуванням транспортних засобів
Номер патенту: 87089
Опубліковано: 27.01.2014
Автори: Кулік Анатолій Степанович, Хлівнюк Ванда Олександрівна, Харіна Наталія Миколаївна, Дергачов Костянтин Юрійович
МПК: G01S 3/02
Мітки: транспортних, засобів, паркуванням, управління, автоматичного, система
Формула / Реферат:
Система автоматичного управління паркуванням транспортних засобів, що містить приймач, приєднаний до рухомого транспортного об'єкта, зв'язаний з глобальною супутниковою системою та керуючим контролером, джерело живлення, вбудований акумулятор, виходи яких з'єднані з підсистемою стабілізації живлення, виходи якої з'єднані з приймачем та керуючим контролером, входи і виходи якого з'єднані з оперативною пам'яттю та енергонезалежним зберігачем...
Система керування літаком
Номер патенту: 37288
Опубліковано: 25.11.2008
Автори: Дибська Ирина Юріївна, Ільченко Олексій Владиславович, Бандура Іван Миколайович
МПК: B64C 13/00
Мітки: літаком, система, керування
Формула / Реферат:
Система керування літаком, що містить важіль керування, зв'язаний механічною проводкою з золотниковою тягою кермового приводу, сервопривід, паралельно підключений до золотникової тяги і електрично зв'язаний з датчиком кута, вмонтованими в проводку керування, резервну завантажувальну пружину і пружинний пристрій негативної жорсткості, що складається з попередньо стиснутої пружини і качалки, датчик кутової швидкості, датчик кутового прискорення...
Система управління літальним апаратом
Номер патенту: 63736
Опубліковано: 15.01.2004
Автори: Симонов Володимир Федорович, Субота Анатолій Максимович, Бандура Іван Миколайович
МПК: B64C 13/00
Мітки: літальним, апаратом, система, управління
Формула / Реферат:
Система управління літальним апаратом, яка містить важіль управління, завантажувальну пружину, датчик кутового положення важеля управління, обчислювач, сервопривід керма висоти, датчик кута тангажа, датчик кутової швидкості і датчик кутового прискорення літального апарата, яка відрізняється тим, що в ній до датчика кутового положення важеля управління під'єднано перший диференціюючий пристрій, вихід якого під'єднано до входу обчислювача і до...
Попередній патент: Спосіб визначення кількості та довжини ділянок наближення шатунної кривої до поверхні сфери просторових важільних механізмів
Наступний патент: Відмовостійка система кутової стабілізації космічного апарата
Випадковий патент: Геотермальний акумулятор теплоти