Спосіб керування інтелектуальною системою головного світла транспортного засобу
Номер патенту: 99913
Опубліковано: 25.06.2015
Автори: Баранова Валентина Олегівна, Ніконов Олег Якович, Щукін Олександр Вікторович
Формула / Реферат
Спосіб керування інтелектуальною системою головного світла транспортного засобу, який полягає у тому, що за допомогою датчиків збирають інформацію про стан руху транспортного засобу та транспортного середовища, після чого оброблена за допомогою АСПО-контролера інформація надходить в електронні блоки освітлення, який відрізняється тим, що в процесі керування враховують заздалегідь отриману інформацію від додатково встановленого транспортного порталу та інформацію, отриману з GPS-системи про положення транспортного засобу на дорозі та його швидкість руху, причому отримані дані передаються з транспортного порталу через електронний блок управління адаптивної системи освітлення на АСПО-контролер, який відповідає за прийняття рішення щодо повороту фар і, як наслідок, забезпечує оптимальне освітлення дороги.
Текст
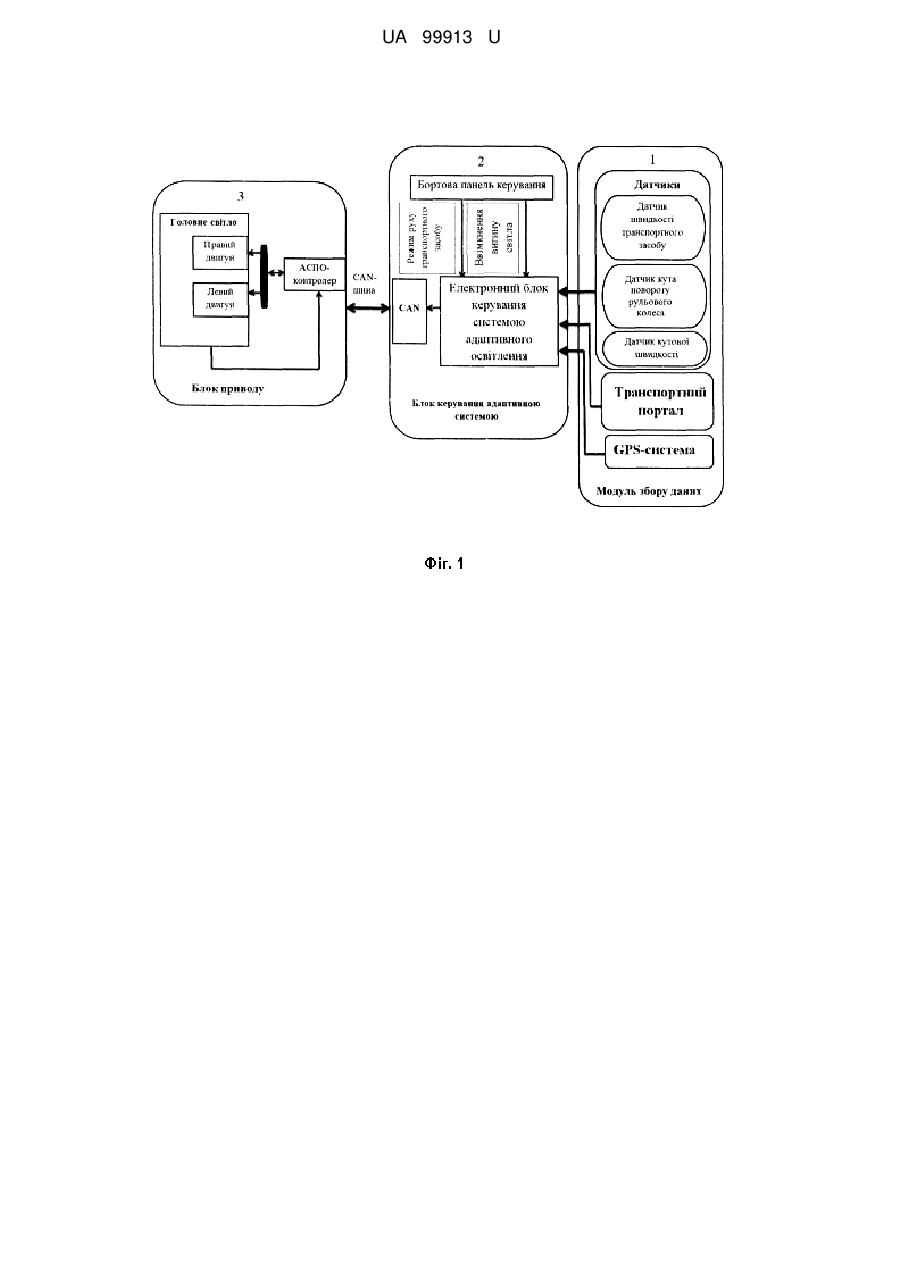
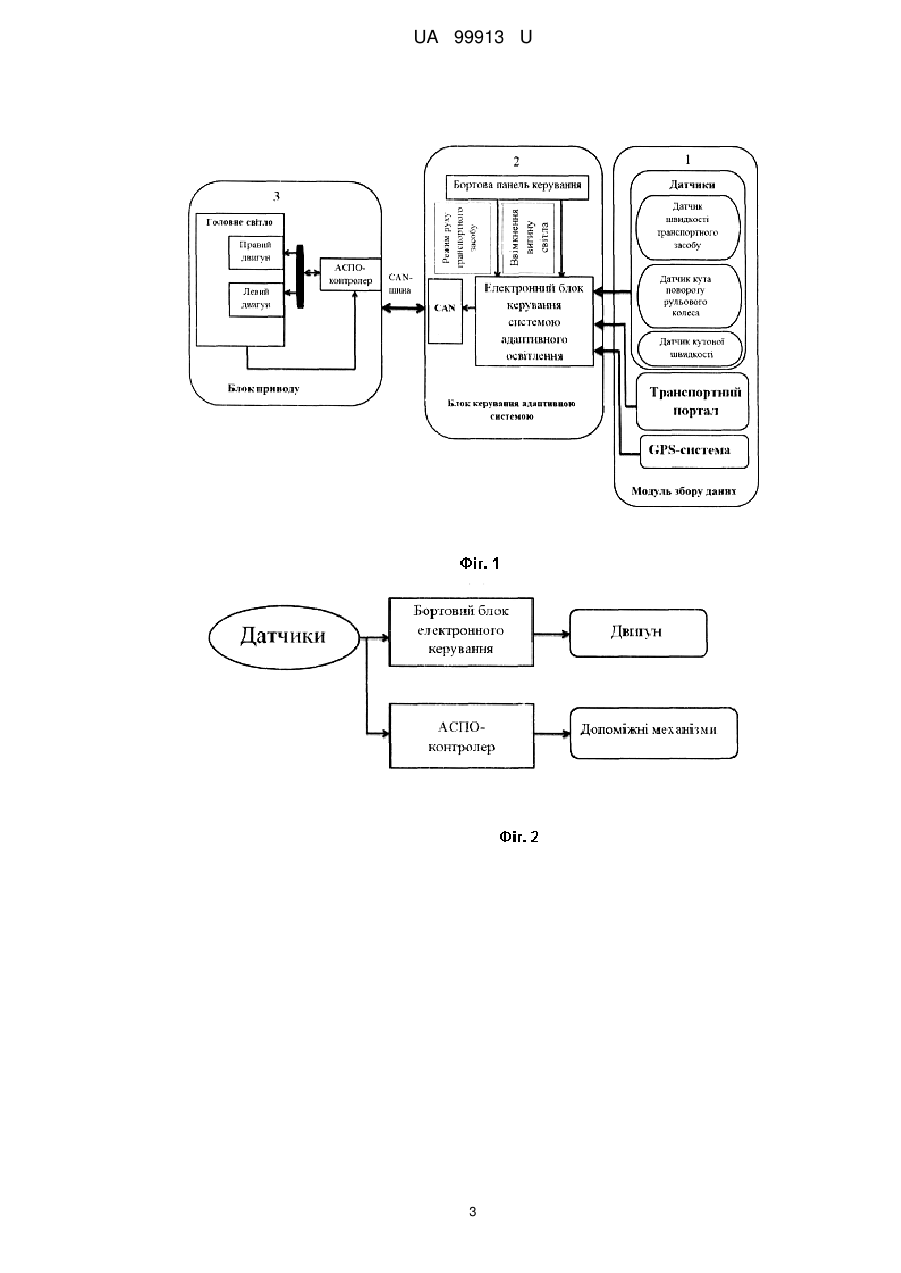
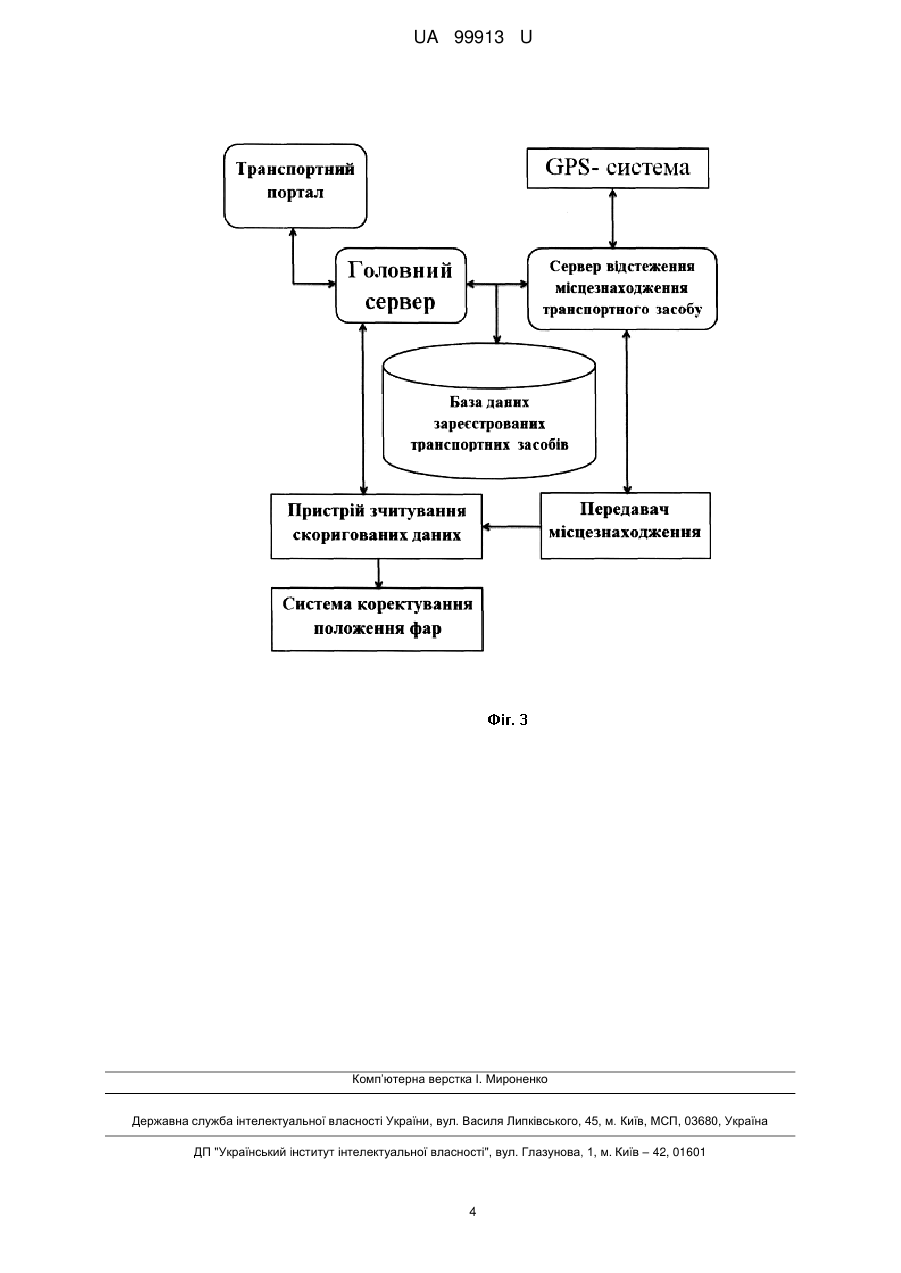
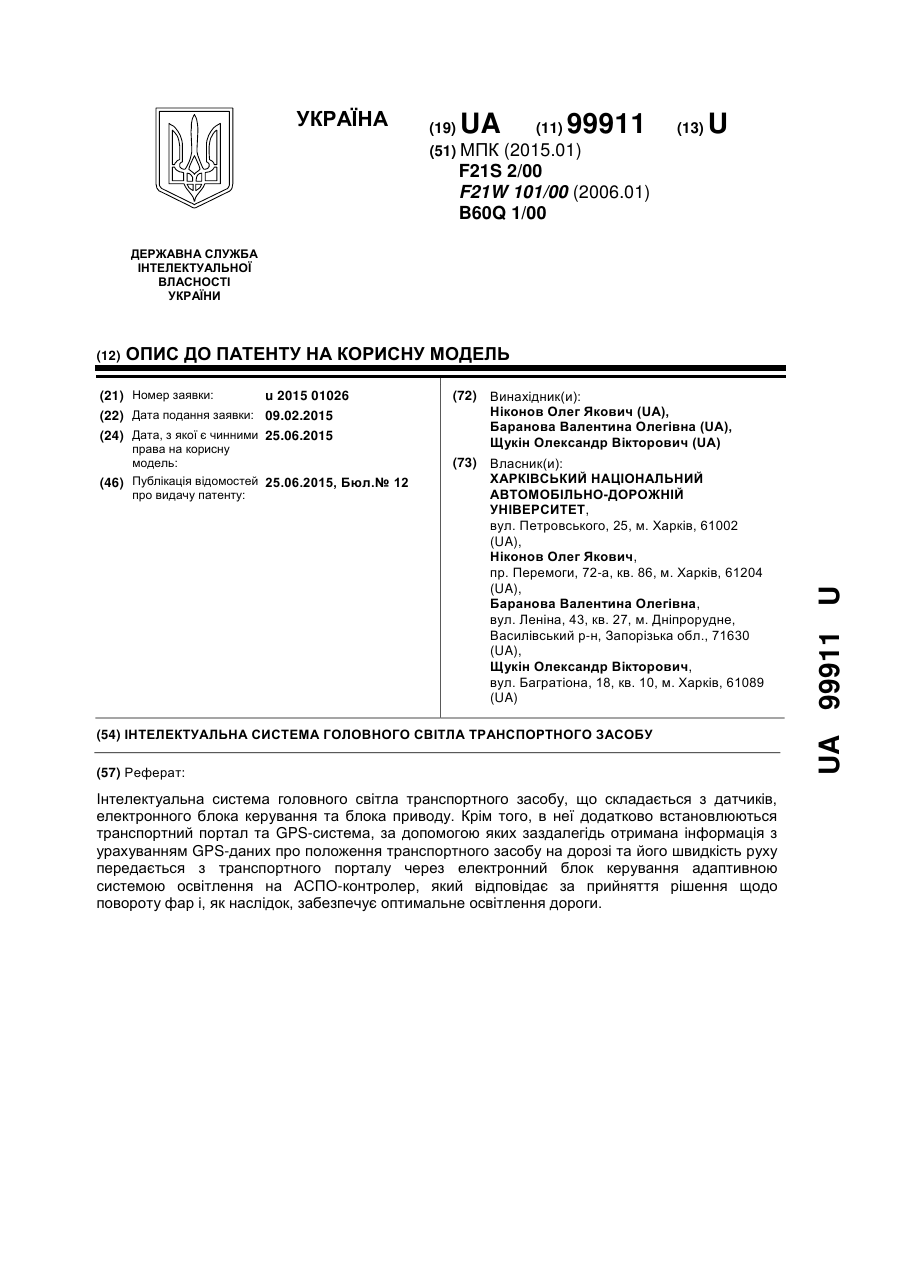
Реферат: Спосіб керування інтелектуальною системою головного світла транспортного засобу полягає у тому, що за допомогою датчиків збирають інформацію про стан руху транспортного засобу та транспортного середовища. Після цього оброблена за допомогою АСПО-контролера інформація надходить в електронні блоки освітлення. В процесі керування враховують заздалегідь отриману інформацію від додатково встановленого транспортного порталу та інформацію, отриману з GPS-системи про положення транспортного засобу на дорозі та його швидкість руху. Отримані дані передаються з транспортного порталу через електронний блок управління адаптивної системи освітлення на АСПО-контролер, який відповідає за прийняття рішення щодо повороту фар і, як наслідок, забезпечує оптимальне освітлення дороги. UA 99913 U (12) UA 99913 U UA 99913 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до машинобудування, зокрема до способів керування інтелектуальною системою головного світла транспортного засобу (ТЗ), і може бути використана при обґрунтуванні будь-яких заходів з підвищення ефективності освітлення ТЗ дороги. Найбільш близьким до запропонованого способу є спосіб керування системою автоматичної адаптації світлотіньової границі променя фар ближнього світла [Латова В.Б. Перспективы развития систем головного освещения транспортных средств / В.Б.Латова, А.А.Эйдинов, С.И.Вылегжанин // Журнал автомобильных инженеров. - 2011. - №6(71). С. 10-13], що являє собою спосіб керування світлотіньовою межею за допомогою системи датчиків, які виявляють положення інших ТЗ, а також включених в електричну схему процесора і блока електронного керування (ECU) для автоматичної адаптації світлотіньової межі променя фар ближнього світла, що забезпечує зниження (запобігання) засліплення шляхом керованого освітлення поверхні дороги попереду ТЗ. При цьому перехід від променя фар дальнього світла до променя ближнього світла відбувається відносно швидко, що сприяє уникненню дискомфорту водія. Завдяки запропонованому способу датчики ТЗ збирають інформацію, після чого оброблена інформація надходить в електронні блоки освітлення. До недоліків розглянутого способу керування системою автоматичної адаптації світлотіньової границі проміння фар ближнього світла належить відсутність отримання водієм інформації про постійні зміни транспортного середовища, тобто відсутність можливості повністю оцінити інформацію про стан дороги та забезпечити оптимальне освітлення дороги. В основу корисної моделі поставлено задачу вдосконалення способу керування інтелектуальною системою головного світла ТЗ, у якому застосування транспортного порталу та GPS-системи поліпшує процес використання інтелектуальної системи головного світла ТЗ за рахунок заздалегідь отриманої інформації про стан дороги. Поставлена задача вирішується переважно завдяки тому, що збір інформації про стан дороги здійснюють не тільки за допомогою датчиків, а й за допомогою транспортного порталу і додатково встановленої GPS-системи, які допомагають здійснити завчасну передачу інформації на бортовий комп'ютер про зустрічні ТЗ, повороти, перехрестя та інші елементи дороги. На фіг. 1 представлено структурну схему інтелектуальної системи головного світла ТЗ, яка складається з трьох частин: модуля збору даних з транспортним порталом та GPS-системою 1, блока керування адаптивною системою 2 і блока приводу 3. Модуль збору даних за допомогою датчиків і карти збору даних, що входить до складу GPS-системи, приймає сигнали з коробки передач, педалі акселератора, педалі зчеплення, педалі гальм і рульового колеса. АСПОконтролер управляє усіма обчислювальними і керуючими задачами. Блок приводу руху осі головного світла забезпечує визначення напрямку і положення ТЗ. Пропонований спосіб керування інтелектуальною системою головного світла ТЗ здійснюється таким чином. Модуль збору пов'язаний з CAN-шиною, через яку всі дані можуть використовуватися спільно з АСПО-контролером, який є ключовою ланкою всієї системи. Він збирає всі сигнали з датчиків, перерахованих вище, необхідних для прийняття рішення бортовим комп'ютером, при цьому АСПО-контролер отримує інформацію про стан ТЗ в необхідний момент. Потім параметри керування передаються до блока приводу. Далі АСПОконтролер повторює пройдений цикл. Центральний блок системи має п'ять входів і два виходи. На п'ять входів надходить інформація з трьох датчиків, транспортного порталу і GPS-системи. З виходів надходить інформація у вигляді команд до двигунів фар. Ввімкнення вигину світла і вибір режиму руху ТЗ є загальними умовами, які надаються водієм. Ці сигнали обробляються у блоці керування приладів і далі подаються до електронного блока керування АСПО. Блок приводу включає в себе ланцюг живлення приводу і двигуни постійного струму. Використовуються два двигуни постійного струму. Привід фари отримує параметри керування від АСПО-контролера з точки зору позиціонування. За допомогою замкнутого контролю положення фар ТЗ система має високу точність керування. При цьому водій керує перемикачем світла в салоні ТЗ при русі, а електронний блок керування - адаптивною системою освітлення, який обробляє отримані дані від датчиків, транспортного порталу і GPS-системи, передає ці дані на АСПО-контролер, завдяки якому відбувається рух фар. Блок-схема, наведена на фіг. 2, відображає послідовність роботи елементів, які входять до складу інформаційно-комунікаційної системи ТЗ. Так сигнали, отримані з датчиків, надходять в електронний блок керування системою адаптивного освітлення. На цьому рівні сигнали декодуються і обробляються для відображення на бортовому блоці електронного керування або для використання іншими електронними блоками. 1 UA 99913 U 5 10 15 20 На фіг. 3 представлено процес корегування головного світла ТЗ. При русі ТЗ сервер відстеження запрошує дані про місце знаходження ТЗ, який зареєстрований в базі даних. Додатково з головного сервера зчитуються координати поворотів або перехресть через транспортний портал та передаються у вигляді параметрів на пристрій зчитування скоригованих даних. Сервер відстеження місцезнаходження робить запит у реальному часі до передатчика місцезнаходження. У відповідь приходить сигнал, який дозволяє визначити необхідно коригування положення фар або ні. Якщо необхідно коригувати положення, з передатчика місцезнаходження надходить інформація на пристрій зчитування скорегованих даних. Далі пристрій запрошує у головного сервера точні параметри, які необхідно скорегувати, після відповіді головного сервера запускається процес корегування положення фар. Запропонований спосіб дозволяє підвищити ефективність інтелектуальної системи головного світла ТЗ за рахунок того, що бортовий комп'ютер завчасно отримує інформацію про повороти, перехрестя тощо. Таким чином на основі механізму адаптації та самонавчання в автоматичному режимі враховуються постійні зміни середи руху ТЗ, оцінюються початкові характеристики і узагальнюється отримана інформацію, а головне, забезпечується оптимальне освітлення дороги. Розроблений спосіб керування інтелектуальною системою головного світла ТЗ може бути використано для автомобілів, ТЗ спеціального призначення, будівельних та дорожніх машин тощо. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 Спосіб керування інтелектуальною системою головного світла транспортного засобу, який полягає у тому, що за допомогою датчиків збирають інформацію про стан руху транспортного засобу та транспортного середовища, після чого оброблена за допомогою АСПО-контролера інформація надходить в електронні блоки освітлення, який відрізняється тим, що в процесі керування враховують заздалегідь отриману інформацію від додатково встановленого транспортного порталу та інформацію, отриману з GPS-системи про положення транспортного засобу на дорозі та його швидкість руху, причому отримані дані передаються з транспортного порталу через електронний блок управління адаптивної системи освітлення на АСПОконтролер, який відповідає за прийняття рішення щодо повороту фар і, як наслідок, забезпечує оптимальне освітлення дороги. 2 UA 99913 U 3 UA 99913 U Комп’ютерна верстка І. Мироненко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП "Український інститут інтелектуальної власності", вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: F21S 2/00, F21W 101/00, B60Q 1/00
Мітки: світла, керування, транспортного, спосіб, інтелектуальною, засобу, системою, головного
Код посилання
<a href="https://ua.patents.su/6-99913-sposib-keruvannya-intelektualnoyu-sistemoyu-golovnogo-svitla-transportnogo-zasobu.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування інтелектуальною системою головного світла транспортного засобу</a>
Інтелектуальна система головного світла транспортного засобу
Номер патенту: 99911
Опубліковано: 25.06.2015
Автори: Щукін Олександр Вікторович, Ніконов Олег Якович, Баранова Валентина Олегівна
МПК: F21S 2/00, F21W 101/00, B60Q 1/00
Мітки: головного, засобу, світла, система, інтелектуальна, транспортного
Формула / Реферат:
Інтелектуальна система головного світла транспортного засобу, що складається з датчиків, електронного блока керування та блока приводу, яка відрізняється тим, що в неї додатково встановлюються транспортний портал та GPS-система, за допомогою яких заздалегідь отримана інформація з урахуванням GPS-даних про положення транспортного засобу на дорозі та його швидкість руху передається з транспортного порталу через електронний блок керування...
Пристрій для контролю регулювання світла фар транспортного засобу
Номер патенту: 7800
Опубліковано: 15.07.2005
Автор: Ананьєв Борис Юрійович
МПК: G01M 11/06
Мітки: світла, фар, регулювання, пристрій, засобу, транспортного, контролю
Формула / Реферат:
1. Пристрій для контролю регулювання світла фар транспортного засобу, що містить вертикально встановлений плоский контрольний екран і горизонтальний майданчик для розташування транспортного засобу, що контролюється, на певній відстані від контрольного екрана, який відрізняється тим, що він містить пристрій для визначення положення на контрольному екрані проекції центра фари, що контролюється, у вигляді направленого джерела світла, напрям...
Спосіб керування центральним замком дверей транспортного засобу
Номер патенту: 51474
Опубліковано: 12.07.2010
Автори: Бабарикін Олексій Валентинович, Голубєв Олександр Анатолійович, Алексєєв Олег Вадимович, Ткаленко Андрій Олександрович
МПК: B60R 99/00, B60R 25/00
Мітки: засобу, спосіб, замком, центральним, транспортного, дверей, керування
Формула / Реферат:
Спосіб керування центральним замком дверей транспортного засобу, в якому використовують пристрій керування центральним замком дверей і радіочастотний канал, який відрізняється тим, що як пристрій керування центральним замком дверей використовують мітку-транспондер, при наближенні власника транспортного засобу з міткою-транспондером до антени на відстань стійкого зв'язку по радіочастотному каналу розпочинають процес ідентифікації...
Додатковий пристрій для автоматичного переключення дальнього світла фар транспортного засобу
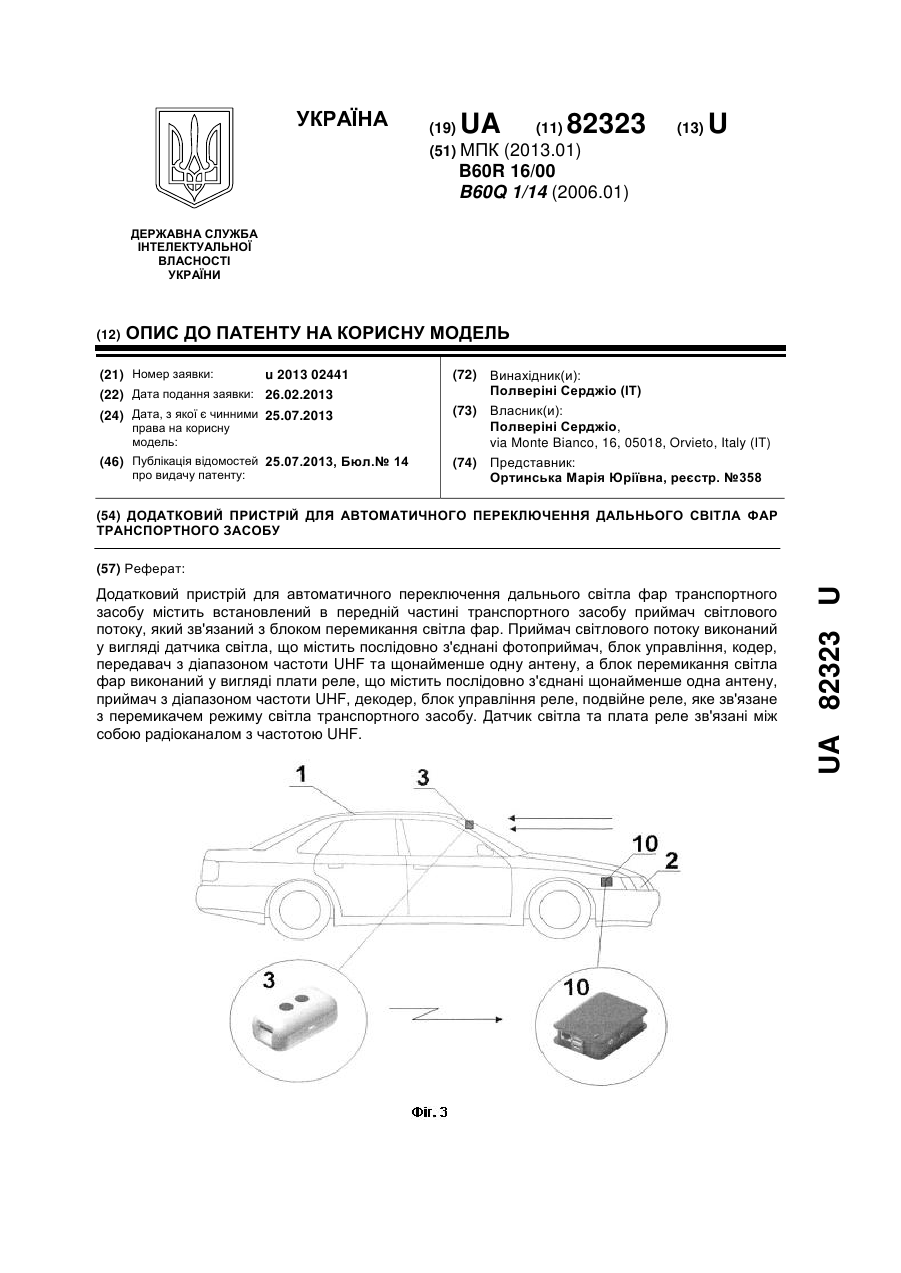
Номер патенту: 82323
Опубліковано: 25.07.2013
Автор: Полверіні Серджіо
МПК: B60R 16/00, B60Q 1/14
Мітки: транспортного, дальнього, додатковий, засобу, світла, переключення, фар, пристрій, автоматичного
Формула / Реферат:
1. Додатковий пристрій для автоматичного переключення дальнього світла фар транспортного засобу, що містить встановлений в передній частині транспортного засобу приймач світлового потоку, який зв'язаний з блоком перемикання світла фар, який відрізняється тим, що приймач світлового потоку виконаний у вигляді датчика світла, що містить послідовно з'єднані фотоприймач, блок управління, кодер, передавач з діапазоном частоти UHF та щонайменше...
Пристрій для автоматичного перемикання світла фар транспортного засобу
Номер патенту: 65853
Опубліковано: 12.12.2011
Автор: Полверіні Серджіо
МПК: B60Q 1/14, G02C 7/14, B60R 16/00
Мітки: автоматичного, фар, пристрій, світла, транспортного, засобу, перемикання
Формула / Реферат:
1. Пристрій для автоматичного перемикання світла фар транспортного засобу, що містить встановлений на передній частині транспортного засобу приймач світлового потоку, включені в електричне коло живлення ламп ближнього та дальнього світла послідовно з'єднані перемикач режиму світла і реле, який відрізняється тим, що додатково містить відбивач світлового потоку, виконаний в формі сферичного сегмента, увігнута відбивальна поверхня якого...
Попередній патент: Спосіб визначення тривалості елементів світлофорної сигналізації
Наступний патент: Пристрій контролю процесу різання
Випадковий патент: Спосіб діагностування електродвигуна