Розвідувальний безпілотний літальний апарат
Номер патенту: 102180
Опубліковано: 26.10.2015
Автори: Боровий Ярослав Анатолійович, Мороз Арсен Вікторович, Борова Валентина Євгенівна, Андрєєв Олександр Анатолійович

Формула / Реферат
1. Розвідувальний безпілотний літальний апарат, що включає планер, силову установку з електродвигуном і блоком живлення у вигляді електричного акумулятора, бортове обладнання, яке включає в себе функціонально пов'язані між собою блок апаратури спостереження, приймально-передавальний блок з антеною і пілотажно-навігаційну систему, який відрізняється тим, що у електродвигуна вал виконаний з двох частин, які з'єднані затискувачем з можливістю їх роз'єднання, при цьому частина вала, яка з'єднана із пропелером, додатково з'єднана за допомогою механізму передачі із вітроелектростанцію, крім того, пілотажно-навігаційна система укомплектована системою пошуку висхідних повітряних потоків і забезпечення находження в цих потоках та системою програмного керування польотом.
2. Розвідувальний безпілотний літальний за п. 1, який відрізняється тим, що затискувач виконаний у вигляді електромагнітної муфти.
Текст
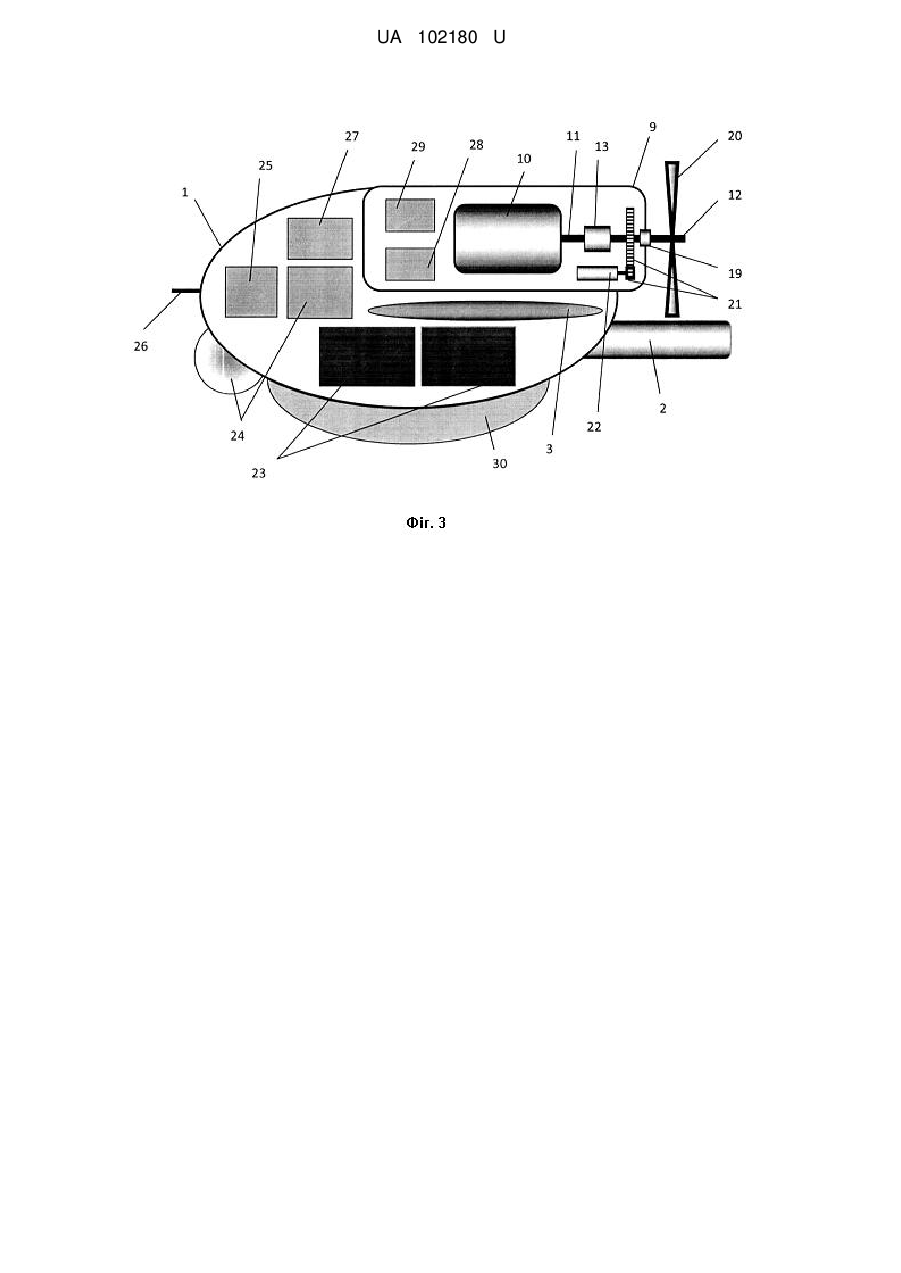
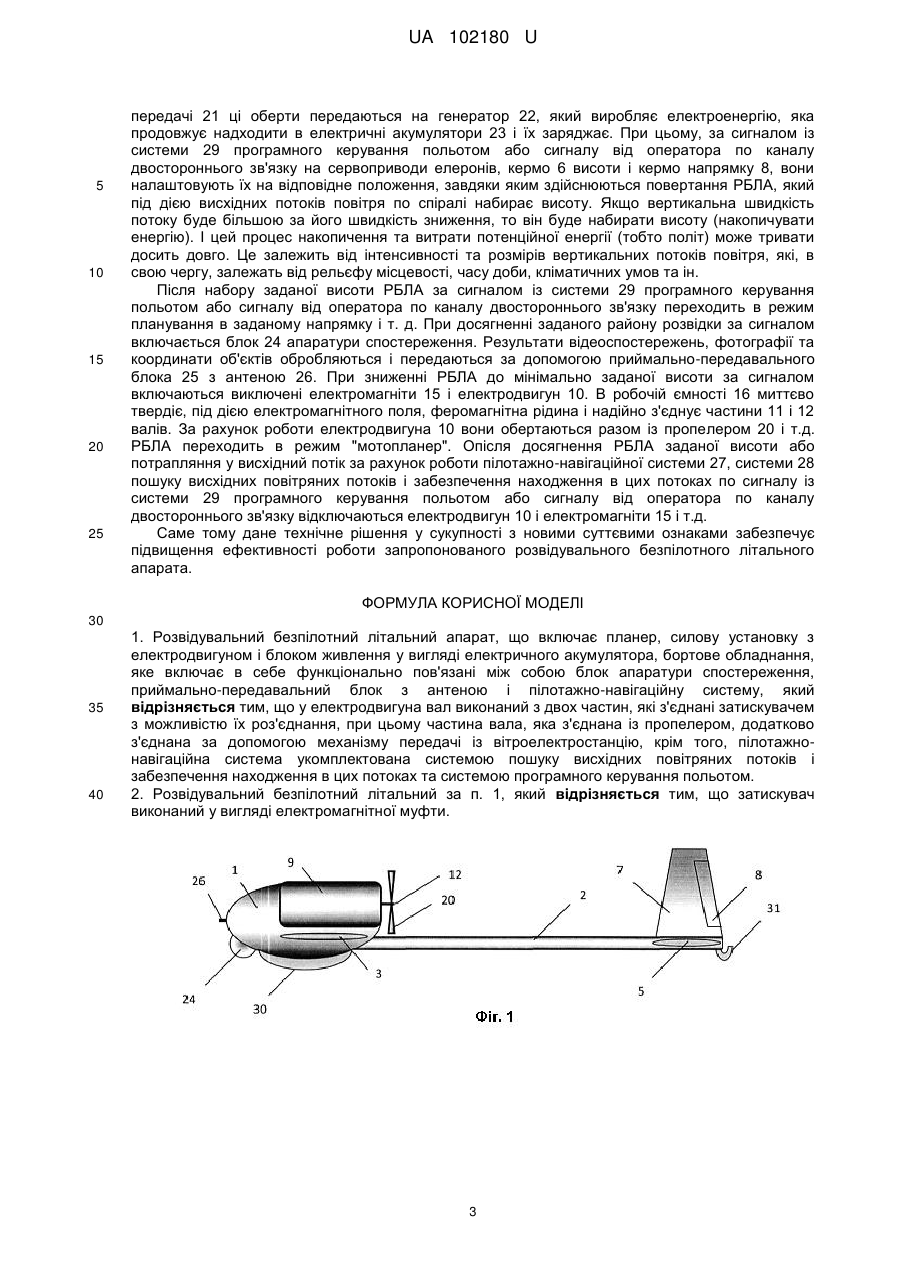
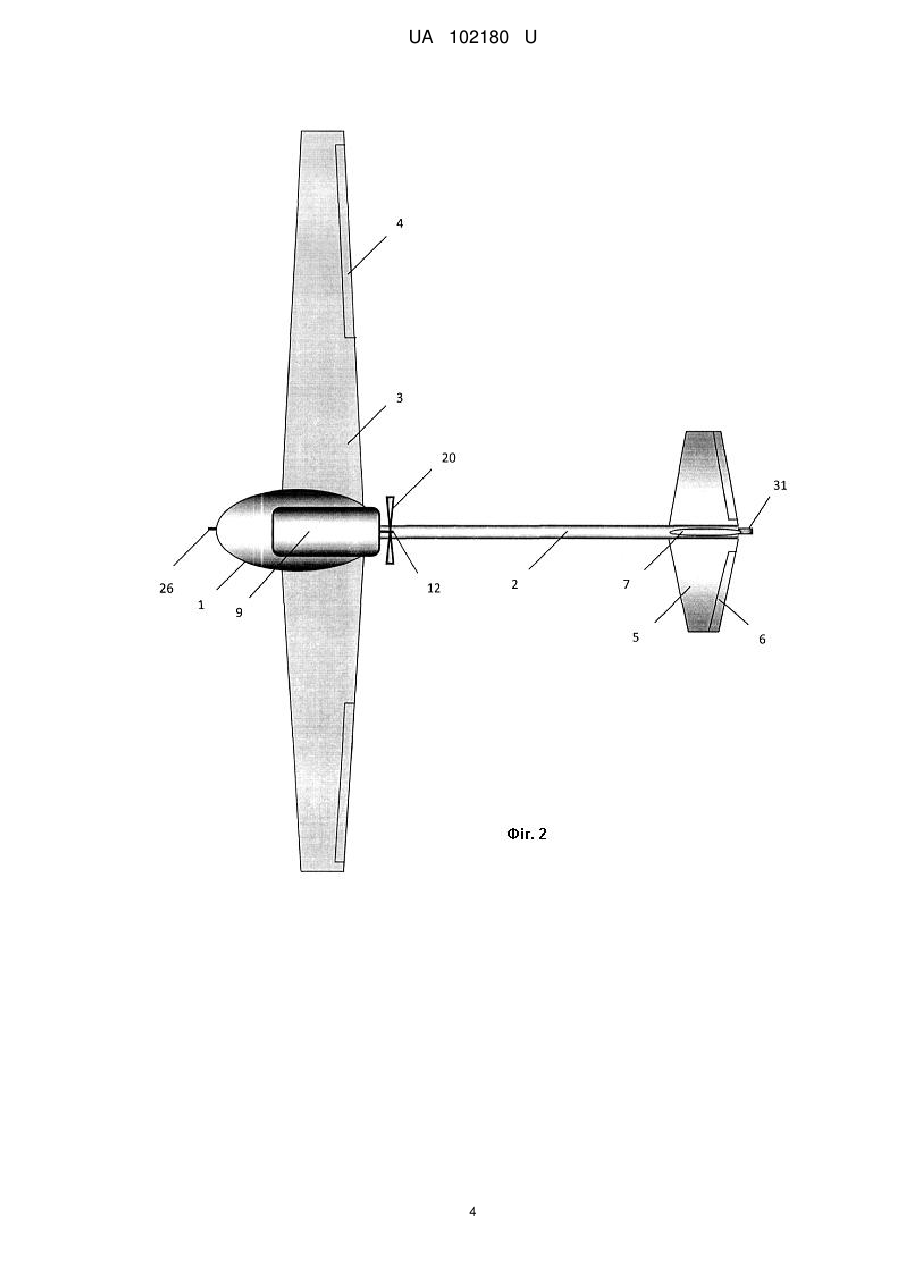
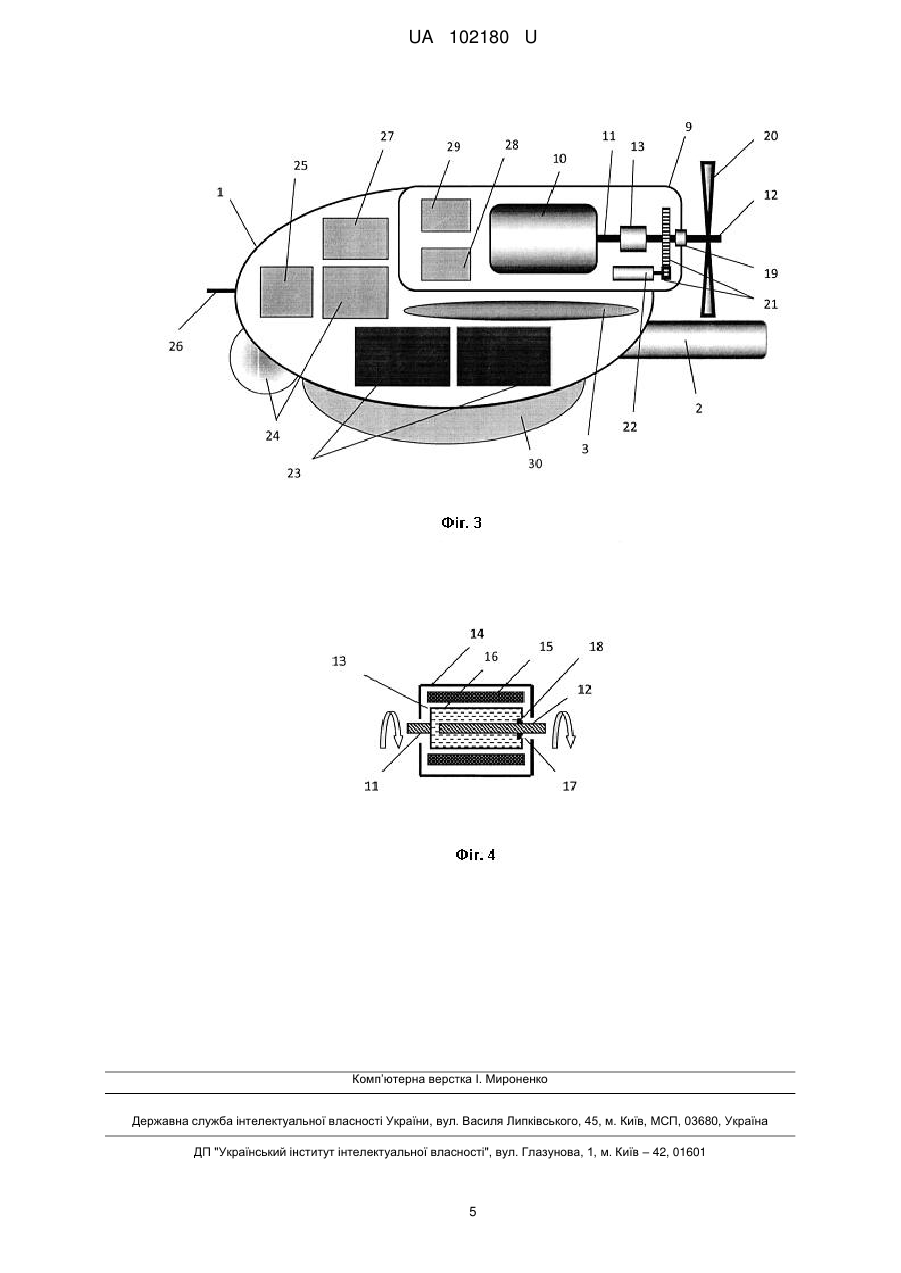
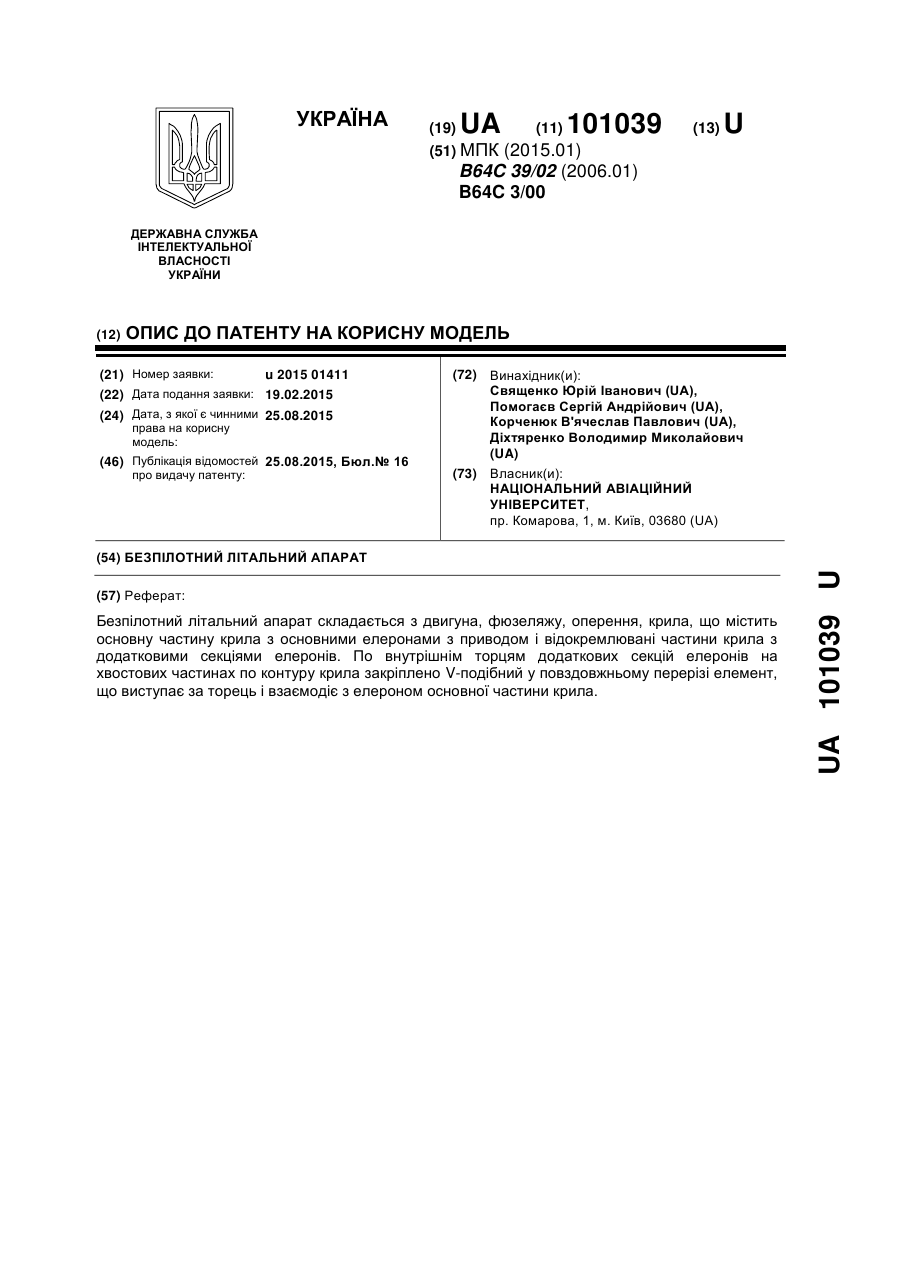
Реферат: Розвідувальний безпілотний літальний апарат включає планер, силову установку з електродвигуном і блоком живлення у вигляді електричного акумулятора, бортове обладнання, яке включає в себе функціонально пов'язані між собою блок апаратури спостереження, приймально-передавальний блок з антеною і пілотажно-навігаційну систему. У електродвигуна вал виконаний з двох частин, які з'єднані затискувачем з можливістю їх роз'єднання, при цьому частина вала, яка з'єднана із пропелером, додатково з'єднана за допомогою механізму передачі із вітроелектростанцію, крім того, пілотажно-навігаційна система укомплектована системою пошуку висхідних повітряних потоків і забезпечення находження в цих потоках та системою програмного керування польотом. UA 102180 U (12) UA 102180 U UA 102180 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до авіаційної техніки, а саме до безпілотних літальних апаратів, призначених для спостереження за великими за площею територіями на значній відстані від місця старту. Відомий безпілотний літальний апарат, що містить планер, силову установку з електродвигуном і блоком живлення у вигляді електричного акумулятора, бортове обладнання, яке включає в себе функціонально пов'язані між собою блок апаратури спостереження, приймальний блок, приймально-передавальну антену і пілотажно-навігаційну систему, планер містить фюзеляж, крило і оперення, електричний акумулятор складається щонайменше з одного паливного елемента, розміщеного в касеті, крило виконане з порожниною і оснащене елементами кріплення касети, крило містить центроплан, з'єднаний з фюзеляжем, і відокремлені частини крила, з'єднані з центропланом, центроплан виконаний з порожниною і оснащений елементами кріплення щонайменше однієї касети з паливними елементами, відокремлені частини крила з'єднані з центропланом за допомогою роз'ємного з'єднання, центроплан виконаний у вигляді кесонної конструкції, а елементи кріплення касети встановлені на поздовжньому силовому наборі центроплана, крило оснащене елеронами і закрилками, касети в центроплані встановлені в кілька ярусів по висоті і/або по хорді та/або за розмахом центроплана крила, блок апаратури спостереження містить щонайменше дві відеокамери, встановлені на стабілізованій платформі, щонайменше дві відеокамери встановлені з можливістю синхронного повороту в площині симетрії БПЛА і бічній площині БПЛА, при цьому кожна з відеокамер виконана з різним масштабом збільшення зображення (Патент Росії на корисну модель №100491, МПК В64С39/02, 20.12.2010). Недоліком цього літального апарата є неможливість забезпечити підзарядку електричного акумулятора без роботи двигуна і набору висоти за рахунок висхідних потоків повітря під час польоту, що обмежує час і глибину зони розвідки, не забезпечує надійність експлуатації в польоті, що знижує його ефективність. Найбільш близьким до пропонованого є розвідувальний безпілотний літальний апарат (РБЛА), що містить силову установку і бортове радіоелектронне обладнання з блоком живлення, апарат виконаний за аеродинамічною літаковою схемою моноплана, що включає фюзеляж, крило і хвостове оперення, при цьому крило має флайперон, фюзеляж з'єднаний з хвостовим оперенням балкою, закріпленою по поздовжній осі літального апарата на центроплані, хвостове оперення виконане V-подібним і складається з двох симетрично розташованих відносно площини симетрії літального апарата кілів, закріплених на балці, кожен з яких забезпечений поворотним кермом, керма встановлені з можливістю їх диференціального відхилення, силова установка розміщена в головній частині фюзеляжу і складається з електричного акумулятора, електродвигуна і кінематично пов'язаного з електродвигуном тягнучого повітряного гвинта, а бортове радіоелектронне обладнання включає в себе функціонально пов'язані між собою телевізійну апаратуру спостереження, приймальний блок, приймально-передавальну антену і пілотажно-навігаційну систему (Патент Росії на корисну модель №41295, МПК В64С 39/02, дата публікації 20.10.2004). Недоліком цього літального апарата є неможливість забезпечити підзарядку електричного акумулятора без роботи двигуна і набору висоти за рахунок висхідних потоків повітря під час польоту, що обмежує час і глибину зони розвідки, забезпечити надійність експлуатації його в польоті, здешевлення і безпеку процесу його переміщення, зменшення вібраційного навантаження на бортове обладнання, що знижує ефективність апарата. В основу корисної моделі поставлена задача розробити такий розвідувальний безпілотний літальний апарат, в якому виконання в електродвигуні вала з двох частин, які з'єднані затискувачем з можливістю їх роз'єднання, додаткове з'єднання частини вала, яка з'єднана із пропелером, за допомогою механізму передачі із вітроелектростанції, крім того, укомплектування пілотажно-навігаційної системи системою пошуку висхідних повітряних потоків і забезпечення находження в цих потоках та системою програмного керування польотом, виконання затискувача у вигляді електромагнітної муфти, дозволяє забезпечити підзарядку електричного акумулятора в польоті без роботи двигуна і набору висоти за рахунок висхідних потоків повітря під час польоту для збільшення часу і глибини зони розвідки, забезпечити надійність експлуатації його в польоті, здешевлення і безпеку процесу його переміщення, зменшення вібраційного навантаження на бортове обладнання, що підвищує ефективність апарата. Поставлена задача вирішується тим, що розвідувальний безпілотний літальний апарат, що містить планер, силову установку з електродвигуном і блоком живлення у вигляді електричного акумулятора, бортове обладнання, яке включає в себе функціонально пов'язані між собою блок апаратури спостереження, приймально-передавальний блок з антеною і пілотажно-навігаційну 1 UA 102180 U 5 10 15 20 25 30 35 40 45 50 55 60 систему, у електродвигуна вал виконаний з двох частин, які з'єднані затискувачем з можливістю їх роз'єднання, при цьому частина вала, яка з'єднана із пропелером, додатково з'єднана за допомогою механізму передачі з вітроелектростанцією, крім того, пілотажно-навігаційна система укомплектована системою пошуку висхідних повітряних потоків і забезпечення находження в цих потоках та системою програмного керування польотом, затискувач, що виконаний у вигляді електромагнітної муфти. Виконання у електродвигуні вала з двох частин, які з'єднані затискувачем з можливістю їх роз'єднання, і додаткове з'єднання частини вала з пропелером за допомогою механізму передачі із вітроелектростанцією, дозволяє забезпечити підзарядку електричного акумулятора в польоті без роботи двигуна, забезпечити цим і надійність експлуатації його в польоті (можливість продовження польоту за заданим маршрутом із непрацюючим двигуном), здешевити і підвищити безпеку (відсутність звуку працюючого двигуна) процесу його переміщення, зменшити вібраційне навантаження на бортове обладнання (підвищується якість відео-, фотоматеріалу). Укомплектування пілотажно-навігаційної системи системою пошуку висхідних повітряних потоків і забезпечення находження в цих потоках дозволяє виконувати набір висоти за рахунок висхідних потоків повітря під час польоту для збільшення часу і глибини зони розвідки, забезпечити надійність експлуатації його в польоті, здешевити і підвищити безпеку процесу його переміщення. Все це підвищує ефективність апарата. На фіг. 1 представлений розвідувальний безпілотний літальний апарат при вигляді збоку; на фіг. 2 - при вигляді в плані; на фіг. 3 представлена частина планера із схематичним зображенням силової установки і обладнання; на фіг. 3 - електромагнітна муфта, поздовжній розріз. РБЛА влаштований таким чином. Він містить розбірний із композиційного пластику планер, що включає носову гондолу 1, хвостову балку 2, трапецієвидні крила 3 великого подовження з елеронами 4, хвостове оперення у вигляді стабілізатора 5 з кермом 6 висоти і кіля 7 з кермом напрямку 8, силове відділення 9, де розміщений електродвигун 10, в якого вал виконаний з двох частин 11 і 12, які з'єднані затискувачем 13 з можливістю їх роз′єднання. Затискач виконаний, наприклад, у вигляді електромагнітної муфти, яка складається з кожуху 14, електромагнітів 15, робочої ємності 16, заповненої феромагнітною рідиною. Частина вала11 електродвигуна 10 жорстко з′єднана з робочою ємністю 16, в порожнину якої через отвір 17 і сальник 18 заведена частина вала12. Ця частина вала споряджена підшипником 19 і з'єднана із пропелером 20, а також додатково з'єднана за допомогою механізму передачі 21 із вітроелектростанцією, яка складається з генератора 22, пропелера 20 і блока живлення у вигляді електричних акумуляторів 23. РБЛА оснащено бортовим обладнанням, що включає в себе функціонально пов'язані між собою блок 24 апаратури спостереження, приймально-передавальний блок 25 з антеною 26 і пілотажнонавігаційну систему 27. Крім того, вона укомплектована системою 28 пошуку висхідних повітряних потоків і забезпечення находження в цих потоках та системою 29 програмного керування польотом. Всі механічні елементи пілотажної системи споряджені сервоприводами (на кресленнях не показані), які функціонально пов'язані з відповідними системами. Під гондолою 1 закріплена лижа 30, а торець хвостової балки 2 споряджений хвостовою допоміжною опорою - костилем 31. Розвідувальний безпілотний літальний апарат працює таким чином. Апарат запускається з руки, резинового амортизатора або з катапульти. Після запуску РБЛА здійснює дистанційно керований політ або політ за заданою програмою до об'єкту розвідки. Політ на початку проходить в режимі "мотопланер" за рахунок роботи електродвигуна 10, який живиться електроенергією від акумуляторів 23. При цьому в затискачі 13 включені електромагніти 15, в робочій ємності 16 затверділа, під дією електромагнітного поля, феромагнітна рідина надійно з'єднала частини 11 і 12 валів. За рахунок роботи електродвигуна 10 вони обертаються разом із пропелером 20. За рахунок механізму передачі 21 ці оберти передаються і на генератор 22, який виробляє електроенергію, яка надходить в електричні акумулятори 23 і їх заряджає. Опісля досягнення РБЛА заданої висоти або потрапляння у висхідний потік за рахунок роботи пілотажно-навігаційної системи 27, системи 28 пошуку висхідних повітряних потоків і забезпечення находження в цих потоках по сигналу із системи 29 програмного керування польотом або сигналу від оператора по каналу двостороннього зв'язку відключаються електродвигун 10 і електромагніти 15, електромагнітне поле зникає і в робочій ємності 16 феромагнітна рідина миттєво відпускає частину 12 вала. РБЛА переходить в режим "планер". Під дією потоку повітря пропелер 20 обертається з частиною вала 12 і через механізм 2 UA 102180 U 5 10 15 20 25 передачі 21 ці оберти передаються на генератор 22, який виробляє електроенергію, яка продовжує надходити в електричні акумулятори 23 і їх заряджає. При цьому, за сигналом із системи 29 програмного керування польотом або сигналу від оператора по каналу двостороннього зв'язку на сервоприводи елеронів, кермо 6 висоти і кермо напрямку 8, вони налаштовують їх на відповідне положення, завдяки яким здійснюються повертання РБЛА, який під дією висхідних потоків повітря по спіралі набирає висоту. Якщо вертикальна швидкість потоку буде більшою за його швидкість зниження, то він буде набирати висоту (накопичувати енергію). І цей процес накопичення та витрати потенційної енергії (тобто політ) може тривати досить довго. Це залежить від інтенсивності та розмірів вертикальних потоків повітря, які, в свою чергу, залежать від рельєфу місцевості, часу доби, кліматичних умов та ін. Після набору заданої висоти РБЛА за сигналом із системи 29 програмного керування польотом або сигналу від оператора по каналу двостороннього зв'язку переходить в режим планування в заданому напрямку і т. д. При досягненні заданого району розвідки за сигналом включається блок 24 апаратури спостереження. Результати відеоспостережень, фотографії та координати об'єктів обробляються і передаються за допомогою приймально-передавального блока 25 з антеною 26. При зниженні РБЛА до мінімально заданої висоти за сигналом включаються виключені електромагніти 15 і електродвигун 10. В робочій ємності 16 миттєво твердіє, під дією електромагнітного поля, феромагнітна рідина і надійно з'єднує частини 11 і 12 валів. За рахунок роботи електродвигуна 10 вони обертаються разом із пропелером 20 і т.д. РБЛА переходить в режим "мотопланер". Опісля досягнення РБЛА заданої висоти або потрапляння у висхідний потік за рахунок роботи пілотажно-навігаційної системи 27, системи 28 пошуку висхідних повітряних потоків і забезпечення находження в цих потоках по сигналу із системи 29 програмного керування польотом або сигналу від оператора по каналу двостороннього зв'язку відключаються електродвигун 10 і електромагніти 15 і т.д. Саме тому дане технічне рішення у сукупності з новими суттєвими ознаками забезпечує підвищення ефективності роботи запропонованого розвідувального безпілотного літального апарата. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 35 40 1. Розвідувальний безпілотний літальний апарат, що включає планер, силову установку з електродвигуном і блоком живлення у вигляді електричного акумулятора, бортове обладнання, яке включає в себе функціонально пов'язані між собою блок апаратури спостереження, приймально-передавальний блок з антеною і пілотажно-навігаційну систему, який відрізняється тим, що у електродвигуна вал виконаний з двох частин, які з'єднані затискувачем з можливістю їх роз'єднання, при цьому частина вала, яка з'єднана із пропелером, додатково з'єднана за допомогою механізму передачі із вітроелектростанцію, крім того, пілотажнонавігаційна система укомплектована системою пошуку висхідних повітряних потоків і забезпечення находження в цих потоках та системою програмного керування польотом. 2. Розвідувальний безпілотний літальний за п. 1, який відрізняється тим, що затискувач виконаний у вигляді електромагнітної муфти. 3 UA 102180 U 4 UA 102180 U Комп’ютерна верстка І. Мироненко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП "Український інститут інтелектуальної власності", вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюSurveillance drone
Автори англійськоюBorovyi Yaroslav Anatoliiovych, Andrieev Oleksandr Anatoliiovych, Borova Valentyna Yevhenivna, Moroz Arsen Viktorovych
Назва патенту російськоюРазведывательный беспилотный летательный аппарат
Автори російськоюБоровой Ярослав Анатольевич, Андреев Александр Анатольевич, Боровая Валентина Евгеньевна, Мороз Арсений Викторович
МПК / Мітки
МПК: B64C 39/02
Мітки: апарат, літальний, безпілотний, розвідувальний
Код посилання
<a href="https://ua.patents.su/7-102180-rozviduvalnijj-bezpilotnijj-litalnijj-aparat.html" target="_blank" rel="follow" title="База патентів України">Розвідувальний безпілотний літальний апарат</a>
Безпілотний літальний апарат “політ”

Номер патенту: 55995
Опубліковано: 27.12.2010
Автори: Подрєза Сергій Михайлович, Лещенко Юрій Терентійович
МПК: B64C 39/00
Мітки: політ, апарат, літальний, безпілотний
Формула / Реферат:
1. Безпілотний літальний апарат, що містить корпус (1) круглої замкнутої форми, вмонтований у корпус привод (2) з двома співвісними горизонтальними пропелерами (3), (4), з верхнім повітрозабірним кільцем (5) та електронним блоком керування, який відрізняється тим, що корпус (1) виконаний у формі кільцевого крила каркасної конструкції, усередині корпусу розміщені сервоприводи зовнішніх керуючих площин, а саме: вертикальних (7) та корпусу (8),...
Безпілотний літальний апарат (бпла)

Номер патенту: 63124
Опубліковано: 26.09.2011
Автори: Корченюк Вячеслав Павлович, Священко Юрій Іванович, Харченко Володимир Петрович
МПК: B64C 3/38
Мітки: апарат, безпілотний, бпла, літальний
Формула / Реферат:
1. Безпілотний літальний апарат (БПЛА), що містить крило із центропланною та від'ємною частинами, внутрішні та зовнішні секції елеронів із протифлатерним вантажем на носках їх нерв'юр, який відрізняється тим, що протифлатерний вантаж виконаний у вигляді вузла приводу-рознімання секцій елерона.2. Безпілотний літальний апарат за п. 1, який відрізняється тим, що вказаний вузол приводу-рознімання виконаний у вигляді двох елементів,...
Безпілотний літальний апарат

Номер патенту: 100737
Опубліковано: 10.08.2015
Автори: Масько Олександр Миколайович, Козей Ярослав Сергійович
МПК: B64C 39/00, B64C 39/02
Мітки: апарат, безпілотний, літальний
Формула / Реферат:
1. Безпілотний літальний апарат, що містить корпус для розміщення корисного навантаження та виконуючих механізмів, розкривні передні та задні крила, вертикальне оперення, двигун з пропелером розташований в носовій частині, аеродинамічні поверхні керування по крену та тангажу розміщені на передньому крилі, розкривні передні та задні крила розміщені на вузлах навіски з однією віссю обертання та мають фіксоване положення після розкриття з...
Безпілотний літальний апарат

Номер патенту: 98629
Опубліковано: 12.05.2015
Автори: Мироненко Валентин Григорович, Збруцький Олександр Васильович, Маранда Сергій Олександрович, Карнаушенко Роман Володимирович, Мельничук Максим Дмитрович
МПК: B64C 39/02
Мітки: безпілотний, літальний, апарат
Формула / Реферат:
Безпілотний літальний апарат, в якому крило виконане стрілоподібним та прямокутним у плані, носова гондола та хвостова балка виконані у вигляді єдиного фюзеляжу, силова установка встановлена безпосередньо у носовій частині фюзеляжу, хвостове оперення виконано V-подібним та стрілоподібним, а робочі органи розміщені безпосередньо у внутрішньому об'ємі крила вздовж його розмаху, який відрізняється тим, що крило виконане з кутом стрілоподібності...
Безпілотний літальний апарат
Номер патенту: 101039
Опубліковано: 25.08.2015
Автори: Діхтяренко Володимир Миколайович, Помогаєв Сергій Андрійович, Священко Юрій Іванович, Корченюк Вячеслав Павлович
МПК: B64C 3/00, B64C 39/02
Мітки: безпілотний, апарат, літальний
Формула / Реферат:
Безпілотний літальний апарат, що складається з двигуна, фюзеляжу, оперення, крила, що містить основну частину крила з основними елеронами з приводом і відокремлювані частини крила з додатковими секціями елеронів, який відрізняється тим, що по внутрішнім торцям додаткових секцій елеронів на хвостових частинах по контуру крила закріплено V-подібний у повздовжньому перерізі елемент, що виступає за торець і взаємодіє з елероном основної частини...
Попередній патент: Пристрій для зубо-альвеолярного подовження
Наступний патент: Установка для комбінованого навантаження оболонок при випробуванні на міцність і жорсткість
Випадковий патент: Установка для культивування нижчих фототрофів