Сигналізатор
Номер патенту: 102883
Опубліковано: 25.11.2015
Автори: Бовдуй Вікторія Валеріївна, Дубовець Олексій Миколайович


Формула / Реферат
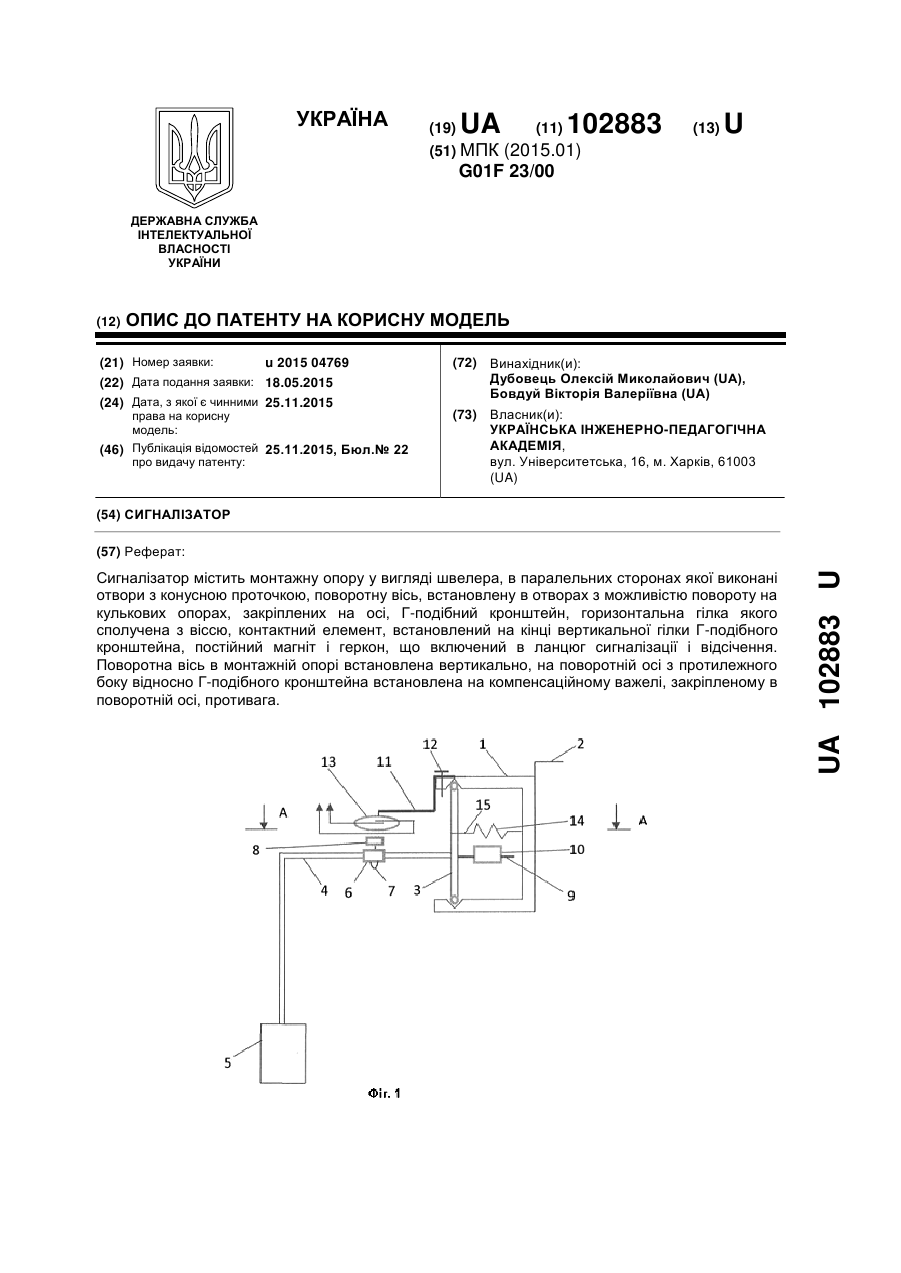
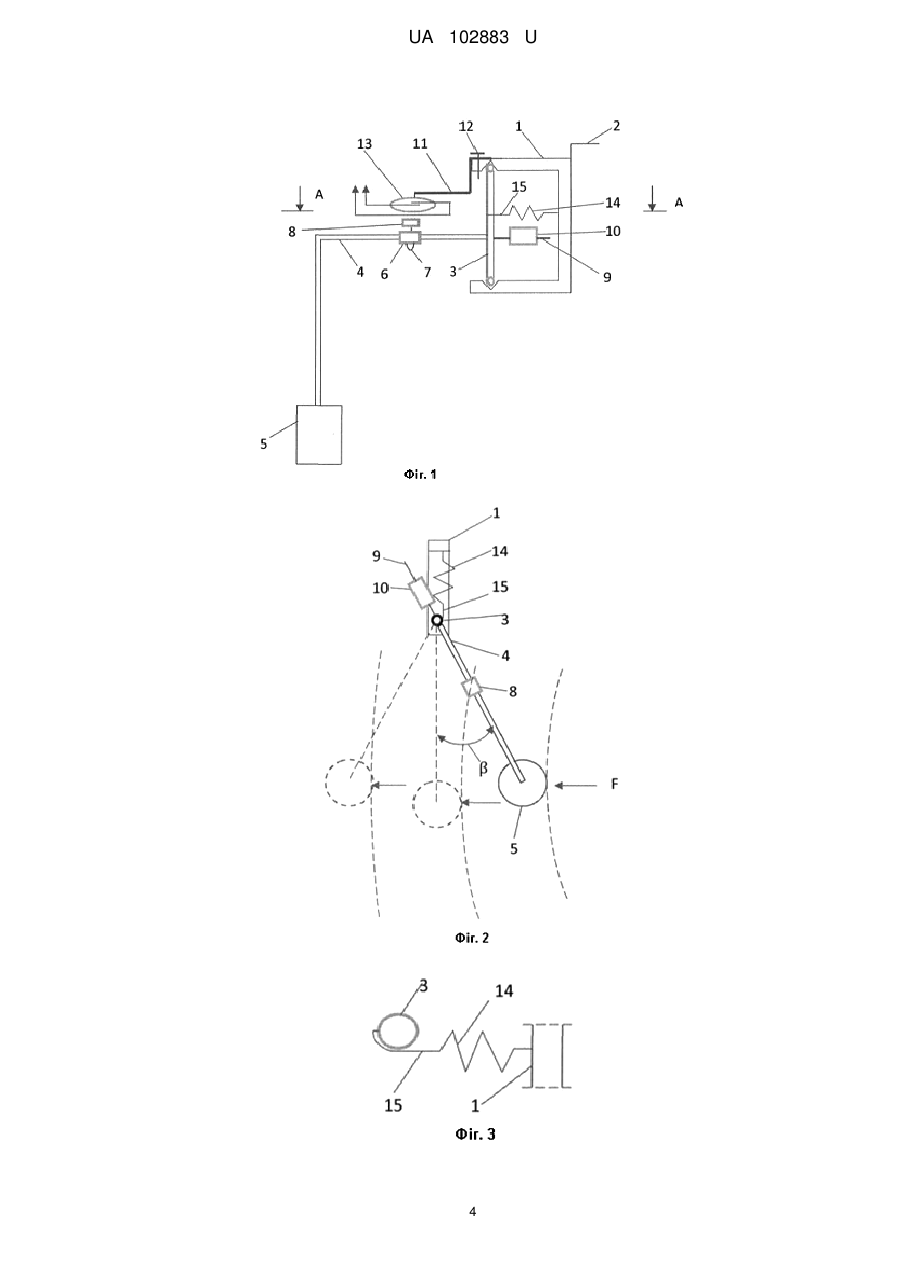
Сигналізатор, що містить монтажну опору у вигляді швелера, в паралельних сторонах якої виконані отвори з конусною проточкою, поворотну вісь, встановлену в отворах з можливістю повороту на кулькових опорах, закріплених на осі, Г-подібний кронштейн, горизонтальна гілка якого сполучена з віссю, контактний елемент, встановлений на кінці вертикальної гілки Г-подібного кронштейна, постійний магніт і геркон, що включений в ланцюг сигналізації і відсічення, який відрізняється тим, що поворотна вісь в монтажній опорі встановлена вертикально, на поворотній осі з протилежного боку відносно Г-подібного кронштейна встановлена на компенсаційному важелі, закріпленому в поворотній осі, противага, маса якої вибрана так, що урівноважує масу Г-подібного кронштейна з контактним елементом, поворотна вісь і монтажна опора сполучені пружинно-тросовим зв'язком, жорсткість пружини якої вибрана так, що горизонтальна гілка Г-подібного кронштейна в початковому положенні повернена відносно вертикальної площини, що проходить крізь центр поворотної осі і середину монтажної опори, на кут b=35° проти годинникової стрілки, при цьому один кінець пружини закріплений на вертикальній частині монтажної опори, другий - сполучений з тросом, закріпленим на поверхні поворотної осі, геркон закріплений на ![]() - подібному кронштейні, верхня частина якого встановлена на верхній з паралельних сторін монтажної опори за допомогою болтового з'єднання з можливістю горизонтального і кутового переміщення і закріплення, а постійний магніт встановлений за допомогою втулки на горизонтальній гілці Г-подібного кронштейна з можливістю його лінійного переміщення і закріплення.
- подібному кронштейні, верхня частина якого встановлена на верхній з паралельних сторін монтажної опори за допомогою болтового з'єднання з можливістю горизонтального і кутового переміщення і закріплення, а постійний магніт встановлений за допомогою втулки на горизонтальній гілці Г-подібного кронштейна з можливістю його лінійного переміщення і закріплення.
Текст
Реферат: UA 102883 U UA 102883 U 5 10 15 20 25 30 35 40 45 50 55 60 Пропонована корисна модель належить до вимірювальної техніки і може використовуватися для сигналізації рівня сипких матеріалів (піску, цукру, зерна та ін.), забезпечуючи високу чутливість до зміни рівня і мінімальну погрішність сигналізації. Відомий сигналізатор рівня сипких матеріалів, що містить порожнистий циліндричний корпус, закритий згори і знизу знімними кришками, нижня з яких має центральний отвір, всередині якого встановлена порожниста конусна втулка, чутливий елемент, виконаний у вигляді штока, встановленого усередині втулки за допомогою кульової опори, закріпленої на штоку на відстані 0,25-0,30 довжин штока від його верхнього кінця, на якому встановлений постійний магніт, а на нижньому кінці штока закріплений контактний елемент, виконаний у вигляді конуса [Патент на корисну модель України № 54294, G01F 23/30, Бюл. № 21 від 10.11.2011]. Перевагою відомого сигналізатора є простота конструкції і незалежність результатів сигналізації від напряму руху сипкого матеріалу. До його недоліків належать: різка зміна чутливості при відхиленні контактного елемента конуса від вертикалі, відсутність можливості регулювання порогу чутливості залежно від фізичних властивостей сипкого матеріалу і можливість викиду кульової опори з конусної втулки при різкій зміні навантаження на контактний елемент. Найбільш близьким за технічною суттю і результатами, що досягаються, пропонованому сигналізатору може служити сигналізатор рівня сипких матеріалів, що містить монтажну опору у вигляді швелера, в паралельних сторонах якої виконані отвори з конусною проточкою, поворотну вісь, встановлену в отворах на кульових опорах, Г-подібний кронштейн, горизонтальна гілка якого закріплена на осі, контактний елемент, встановлений на нижньому кінці вертикальної гілки Г-подібного кронштейна, постійний магніт, закріплений на кінці осі за допомогою пластини, і геркон, включений в ланцюг сигналізації і відсічення подання матеріалу в технологічний об'єкт, при цьому поворотна вісь встановлена в отворах з конусною проточною під кутом (37)° до вертикалі [Патент України на корисну модель № 774000, G01F 23/30. Бюл. № 3 від 11.02.2013]. Перевагами прототипу є: простота конструкції, висока чутливість до зміни рівня, переміщення контактного елемента при дії на нього матеріалу і у бік руху, і частково вгору, що при різких змінах тиску матеріалу на контактний елемент не призводить до його перевантаження. До недоліків прототипу слід віднести: 1) нахил поворотної осі в межах (37)° є причиною її незрівноваженості відносно вертикалі додаткового навантаження на кульові опори; 2) зменшення чутливості сигналізатора до зміни рівня в об'єкті при повороті Г-подібного важеля від початкового положення (в результаті зменшення плеча додатка дії сипкого матеріалу на контактний елемент), 3) при різких змінах тиску на контактний елемент можливе відхилення Г-подібного важеля на кут до 85°, що не унеможливлює ударне зіткнення важеля з обмежуючою опорою, що негативно впливає на кінематику сигналізатора; не виключений також варіант неповернення контактного елемента в початкове положення при кутах відхилення Г-подібного важеля від початкового положення в межах 8085°, оскільки при вказаних кутах зворотна сила, що створюється тільки кутом нахилу поворотної осі, прагне до нуля. Задачею корисної моделі є усунення недоліків прототипу при обов'язковому збереженні його переваг. Поставлена задача вирішується за рахунок того, що у відомого сигналізатора рівня сипкого матеріалу, що містить монтажну опору у вигляді швелера, в паралельних сторонах якої виконані отвори з конусною проточкою, поворотну вісь, встановлену в отворах на кульових опорах, Г-подібний кронштейн, горизонтальна гілка якого закріплена на осі, контактний елемент, встановлений на нижньому кінці вертикальної гілки Г-подібного кронштейна, постійний магніт, закріплений на кінці осі за допомогою пластини, і геркон, включений в ланцюг сигналізації і відсічення подання матеріалу в технологічний об'єкт, при цьому поворотна вісь встановлена в отворах з конусною проточкою під кутом (37)° до вертикалі, а початкове і граничне відхилення Г-подібного кронштейна обмежується жорсткими опорами, внаслідок чого має місце: незрівноваженість поворотної осі, недостатність зворотної сили при відхиленні Г-подібного кронштейна на кут до 85°, істотне навантаження на поворотну вісь при різкому зіткненні Гподібного кронштейна з обмежуючою опорою, відповідно до корисної моделі поворотна вісь в монтажній опорі встановлена вертикально, на поворотній осі з протилежного боку відносно Гподібного кронштейна встановлена на компенсаційному важелі, закріпленому в поворотній осі, противага, маса якої вибрана так, що урівноважує масу Г-подібного кронштейна з контактним 1 UA 102883 U 5 10 15 20 25 30 35 40 45 50 55 елементом, поворотна вісь і монтажна опора сполучені пружинно-тросовим зв'язком, жорсткість пружини якої вибрана так, що горизонтальна гілка Г-подібного кронштейна в початковому положенні повернена відносно вертикальної площини, що проходить крізь центр поворотної осі і середину монтажної опори, на кут =35° проти годинникової стрілки, при цьому один кінець пружини закріплений на вертикальній частині монтажної опори, другий - сполучений з тросом, закріпленим на поверхні поворотної осі, геркон закріплений на фігурному - подібному кронштейні, верхня частина якого встановлена на поверхні верхньої з паралельних сторін монтажної опори за допомогою болтового з'єднання з можливістю горизонтального і кутового переміщення і закріплення, а постійний магніт встановлений за допомогою втулки на горизонтальній гілці Г-подібного кронштейна з можливістю його лінійного переміщення і закріплення. Схема пропонованого сигналізатора приведена на Фіг. 1, на Фіг. 2 показаний вигляд конструкції сигналізації (зв'язок його елементів) по АА, на Фіг. 3 показаний (у збільшеному виді) пружинно-тросовий зв'язок поворотної осі сигналізатора з вертикальною стороною монтажної опори. Сигналізатор складається з монтажної у вигляді швелера опори 1, яка за допомогою кронштейна 2 жорстко кріпиться усередині технологічного об'єкту (на Фіг. 1 не показано), поворотної вертикальної осі 3 (яка може бути встановлена в підшипниках, кернових опорах або кульових опорах), на якій з боку протилежної від монтажної опори 1 закріплений Г-подібний важіль 4, на вертикальному кінці якого встановлений контактний елемент 5 у вигляді порожнистого циліндра, втулки 6, встановленої на горизонтальній ділянці Г-подібного кронштейна 4 з можливістю лінійного переміщення і закріплення за допомогою затискного пристрою 7, постійного магніту 8, закріпленого на втулці 7, компенсаційного важеля 9, закріпленого на поворотній осі 3 з протилежної відносно Г-подібного важеля 4 стороні, на якій встановлений з можливість переміщення і закріплення контр-вантаж 10, фігурного кронштейна 11, встановленого на верхній з паралельних сторін монтажної опори 1 за допомогою гвинта 12 з можливістю повороту в межах 45° і лінійного переміщення, геркона 13, закріпленого на фігурному кронштейні 11, пружини 14, закріпленої одним кінцем до вертикальної сторони монтажної опори 1, а іншим за допомогою металевого тросу 15 діаметром 1 мм до корпусу поворотної вертикальної осі 3. Робота сигналізатора здійснюється таким чином. Сигналізатор встановлюється в технологічному об'єкті так, щоб кінець контактного елемента 5 знаходився нижче верхнього граничного рівня сипкого матеріалу на висоту рухливого шару матеріалу, що переміщається по його конусу. При цьому натягнення пружини 14 підбирається так, щоб важіль 4 був повернений на кут =3035° відносно вертикальної площини, що проходить через центр поворотної осі і середину монтажної опори 1. При досягненні сипким матеріалом контактного елемента 5, матеріал впливає на нього і переміщає важіль 4 у бік руху матеріалу. Одночасно переміщається постійний магніт 8 у бік геркона 13, закріпленого на фігурному кронштейні 11. При проходженні постійного магніту 8 під герконом 13 відбувається замикання контактів геркона, які включені в ланцюг мікропроцесорного блока сигналізації і відсічення (на Фіг. 1 не показаний). Мікропроцесорний блок включає елементи сигналізації (світлові або звукові) і відключає живлення механізмів, що подають сипкий матеріал в технологічний об'єкт. Закріплення геркона 13 на фігурному - подібному кронштейні 11 забезпечує можливість переміщення геркона і уздовж верхньої з паралельних сторін монтажної опори 1, і його кутового переміщення. Завдяки цьому і переміщенню постійного магніту 8 по горизонтальній ділянці Гподібного важеля 4 забезпечується можливість зміни порогу чутливості сигналізатора в широких межах і мінімізується погрішність спрацьовування геркона 13 - мінімізується вплив зони його "нечутливості", яка знаходиться в межах ±1,0-1,5 мм. Використання пружинно-тросового зв'язку між поворотною віссю 3 і вертикальною стороною монтажної опори 1 забезпечує (при повороті Г-подібного важеля під дією сипкого матеріалу) поворот осі 1, намотування на її поверхню троса 15 і розтягування пружини 14, а також повернення важеля 4 при спорожненні місткості від сипкого матеріалу в початкове положення. Вибір початкового положення важеля 4 під кутом =35° відносно вертикальної площини, що проходить через центр поворотної осі 3 і середину монтажної опори 1, забезпечує при переміщенні важеля 4 (під дією тиску сипкого матеріалу - сили F) збільшення плеча додатка сили, що переміщає контактний елемент 5, що збільшує чутливість сигналізатора до зміни рівня сипкого матеріалу. Установка контр-вантажу на компенсаційному важелі, закріпленого з протилежного від Гподібного кронштейна боку, "центрує" вісь в опорах, стабілізує її режим навантаження. 2 UA 102883 U 5 10 15 20 Збільшення плеча додатка сили тиску сипкого матеріалу - F при повороті Г-подібного важеля від початкового положення на =35° забезпечує переміщення контактного елемента 5 і у напрямі дії сили, і зміщення контактного елемента в зону збільшення плеча додатка сили, що сприяє плавному збільшенню дії матеріалу на контактний елемент 5 і спрацьовування сигналізатора в межах . При збільшенні за межі 35° плече додатка сили F на контактний елемент зменшується і далі прагне до 0 - відбувається плавне "гальмування" контактного елемента. Таким чином, пропонований сигналізатор в порівнянні з прототипом має наступні переваги: 1. Забезпечується повернення контактного елемента в початкове положення при будь-яких відхиленнях Г-подібного важеля. 2. Забезпечується центрування поворотної осі. 3. Забезпечується в широких межах регулювання порогу чутливості і мінімізація залежності погрішності виміру-сигналізації від "гістерезису" геркона. 4. Забезпечується самогальмування контактного елемента після спрацьовування системи сигналізації і відсічення - після його виходу за межі =35° і подальшого руху за інерцією при різкій дії. 5. Максимально спрощується налаштування системи спрацьовування на оптимальний режим. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 35 Сигналізатор, що містить монтажну опору у вигляді швелера, в паралельних сторонах якої виконані отвори з конусною проточкою, поворотну вісь, встановлену в отворах з можливістю повороту на кулькових опорах, закріплених на осі, Г-подібний кронштейн, горизонтальна гілка якого сполучена з віссю, контактний елемент, встановлений на кінці вертикальної гілки Гподібного кронштейна, постійний магніт і геркон, що включений в ланцюг сигналізації і відсічення, який відрізняється тим, що поворотна вісь в монтажній опорі встановлена вертикально, на поворотній осі з протилежного боку відносно Г-подібного кронштейна встановлена на компенсаційному важелі, закріпленому в поворотній осі, противага, маса якої вибрана так, що урівноважує масу Г-подібного кронштейна з контактним елементом, поворотна вісь і монтажна опора сполучені пружинно-тросовим зв'язком, жорсткість пружини якої вибрана так, що горизонтальна гілка Г-подібного кронштейна в початковому положенні повернена відносно вертикальної площини, що проходить крізь центр поворотної осі і середину монтажної опори, на кут =35° проти годинникової стрілки, при цьому один кінець пружини закріплений на вертикальній частині монтажної опори, другий - сполучений з тросом, закріпленим на поверхні 40 поворотної осі, геркон закріплений на - подібному кронштейні, верхня частина якого встановлена на верхній з паралельних сторін монтажної опори за допомогою болтового з'єднання з можливістю горизонтального і кутового переміщення і закріплення, а постійний магніт встановлений за допомогою втулки на горизонтальній гілці Г-подібного кронштейна з можливістю його лінійного переміщення і закріплення. 25 30 3 UA 102883 U 4 UA 102883 U Комп’ютерна верстка О. Гергіль Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюSignaling device
Автори англійськоюDubovets Oleksii Mykolaiovych, Bovdui Viktoriia Valeriivna
Назва патенту російськоюСигнализатор
Автори російськоюДубовец Алексей Николаевич, Бовдуй Виктория Валериевна
МПК / Мітки
МПК: G01F 23/00
Мітки: сигналізатор
Код посилання
<a href="https://ua.patents.su/7-102883-signalizator.html" target="_blank" rel="follow" title="База патентів України">Сигналізатор</a>
Сигналізатор рівня сипучих матеріалів
Номер патенту: 77400
Опубліковано: 11.02.2013
Автори: Подустов Михайло Олексійович, Литвиненко Ігор Іванович, Дубовець Олексій Миколайович
МПК: G01F 23/30
Мітки: сигналізатор, рівня, матеріалів, сипучих
Формула / Реферат:
Сигналізатор рівня сипучого матеріалу, що містить вісь, чутливий елемент, постійний магніт і геркон, який відрізняється тим, що вісь сигналізатора, встановлена між паралельними сторонами монтажної опори, виконаної у вигляді відрізка швелера, велика сторона монтажної опори і вісь нахилені від вертикалі на кут a=(3-7)° у бік вершини конуса сипучого матеріалу, вісь встановлена в кульових опорах, її довжина вибрана так, щоб кінці осі виступали з...
Сигналізатор рівня

Номер патенту: 62817
Опубліковано: 12.09.2011
Автори: Панфілов Олександр Анатолійович, Дубовець Олексій Миколайович
МПК: G01F 23/00
Мітки: сигналізатор, рівня
Формула / Реферат:
Сигналізатор рівня, що містить чутливий елемент у вигляді прапорця, встановленого на осі обертання, нижній кінець якого загнутий під кутом, рівним куту природнього укосу сипучого матеріалу, противагу, постійний магніт та геркон, який відрізняється тим, що вісь обертання, на якій закріплений чутливий елемент - прапорець, встановлена в нижній частині П-подібного кронштейна, на поворотній осі із протилежної сторони щодо прапорця встановлений у...
Механічний сигналізатор рівня сипучих матеріалів
Номер патенту: 54294
Опубліковано: 10.11.2010
Автори: Григорова Олена Миколаївна, Павленко Катерина Юріївна, Дубовець Олексій Миколайович
МПК: G01F 23/30
Мітки: сипучих, механічний, рівня, сигналізатор, матеріалів
Формула / Реферат:
Механічний сигналізатор рівня сипучих матеріалів, що містить корпус, чутливий елемент, геркон, постійний магніт, який відрізняється тим, що корпус сигналізатора виконаний у вигляді порожнистого циліндра, закритого зверху й знизу знімними кришками, нижня кришка має центральний отвір, усередині якого закріплена втулка, виготовлена у вигляді порожнистого зрізаного конуса, чутливий елемент виконаний у вигляді штока, установленого усередині...
Сигналізатор рівня
Номер патенту: 94275
Опубліковано: 10.11.2014
Автори: Солдатова Марія Іванівна, Подустов Михайло Олексійович, Литвиненко Ігор Іванович, Дубовець Олексій Миколайович
МПК: G01F 23/00
Мітки: рівня, сигналізатор
Формула / Реферат:
Сигналізатор рівня, що містить захисний кожух, поворотну вісь, встановлений на осі прапорець, постійний магніт, закріплений на прапорці, геркон і блок сигналізації і осічки, який відрізняється тим, що в конструкцію сигналізатора введена друга поворотна вісь, встановлена паралельно першій, на якій стаціонарно встановлений важіль, на нижньому кінці якого закріплена противага, а на верхньому кінці - геркон, при цьому осі кінематично зв'язані...
Сигналізатор
Номер патенту: 98357
Опубліковано: 27.04.2015
Автор: Дубовець Олексій Миколайович
МПК: G01F 23/00
Мітки: сигналізатор
Формула / Реферат:
Сигналізатор, що містить чутливий елемент - прапорець, кінематичну систему, що забезпечує переміщення прапорця під дією сипкого матеріалу, постійний магніт і геркон, контакти якого управляють системою сигналізації і відсічення, який відрізняється тим, що горизонтальна вісь, на якій встановлений чутливий елемент, виконана нерухомою і закріплена усередині порожнистого розподільного конуса, встановленого під направляючою трубою за допомогою...
Попередній патент: Сировинна суміш
Наступний патент: Товщиномір
Випадковий патент: Установка для формування об'ємних деталей головних уборів вібровихровим способом