Пристрій керування електродвигуном
Формула / Реферат
1. Пристрій керування електродвигуном, що містить перетворювач частоти із широтно-імпульсною модуляцією (ШІМ) із системою керування інвертором із широтно-імпульсною модуляцією, силовий LC-фільтр, підключений до вихідних клем перетворювача частоти, асинхронний електродвигун, підключений до вихідних клем силового LC-фільтра, систему керування електродвигуном, який відрізняється тим, що додатково містить попереджуючий компенсатор, який містить суматори і помножувачі та з'єднаний входами напруг з виходами напруг системи керування електродвигуном, а виходами напруг з входами системи керування інвертором із широтно-імпульсною модуляцією.
2. Пристрій керування електродвигуном за п. 1, який відрізняється тим, що попереджуючий компенсатор виконаний у вигляді двох гілок паралельно з'єднаних пар чотирьох помножувачів виходів напруг системи керування двигуном з виходами п'ятого помножувача і суматора, де виходи кожного з помножувачів однієї гілки і перехресного помножувача іншої гілки попарно з'єднані з входами суматорів, відповідно, виходи яких є виходами напруг попереджуючого компенсатора, при цьому вихід сигналу кутової швидкості вектора напруги системи керування електродвигуна з'єднаний з першим входом п'ятого помножувача, другий і третій входи якого з'єднані з блоками зберігання даних значень активного опору R і ємності С LC-фільтра та з першим та другим входами шостого помножувача, третій і четвертий входи якого з'єднані з блоками зберігання даних індуктивності L і ємності С LC-фільтра, а вихід п'ятого помножувача з'єднаний з входами кожного з помножувачів однієї гілки, причому вихід шостого помножувача з'єднаний з входом суматора, вихід якого з'єднаний з входом помножувачів другої гілки.
Текст
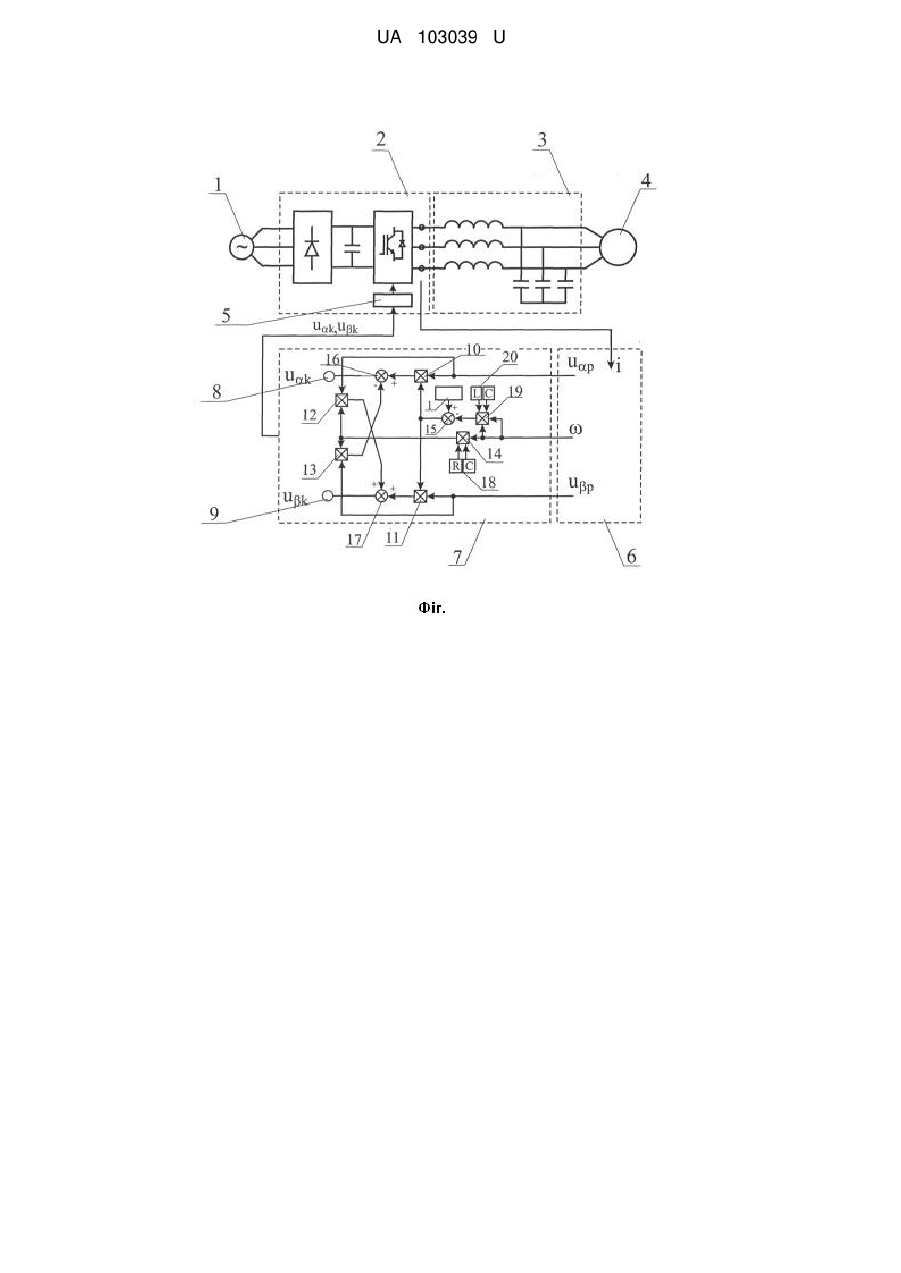
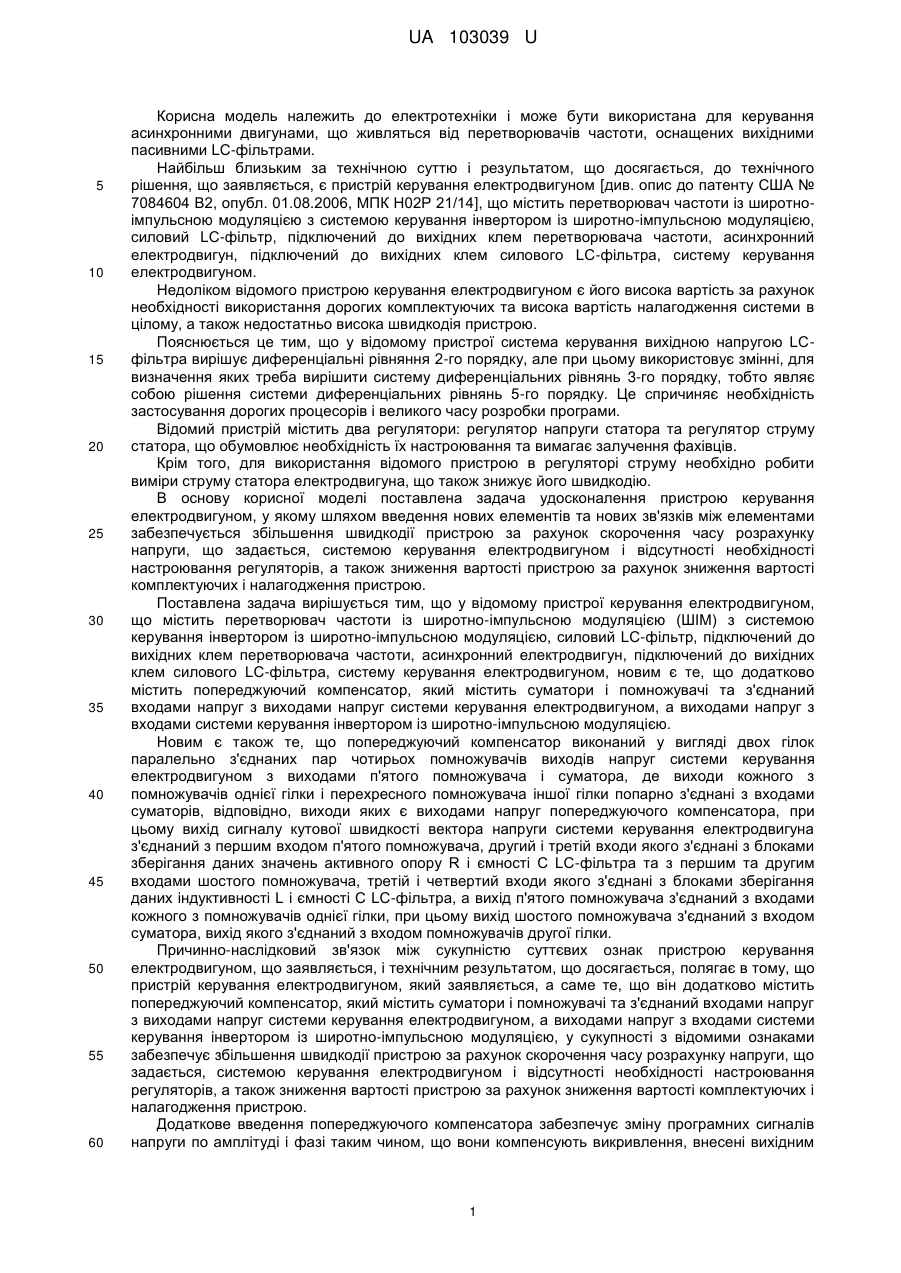
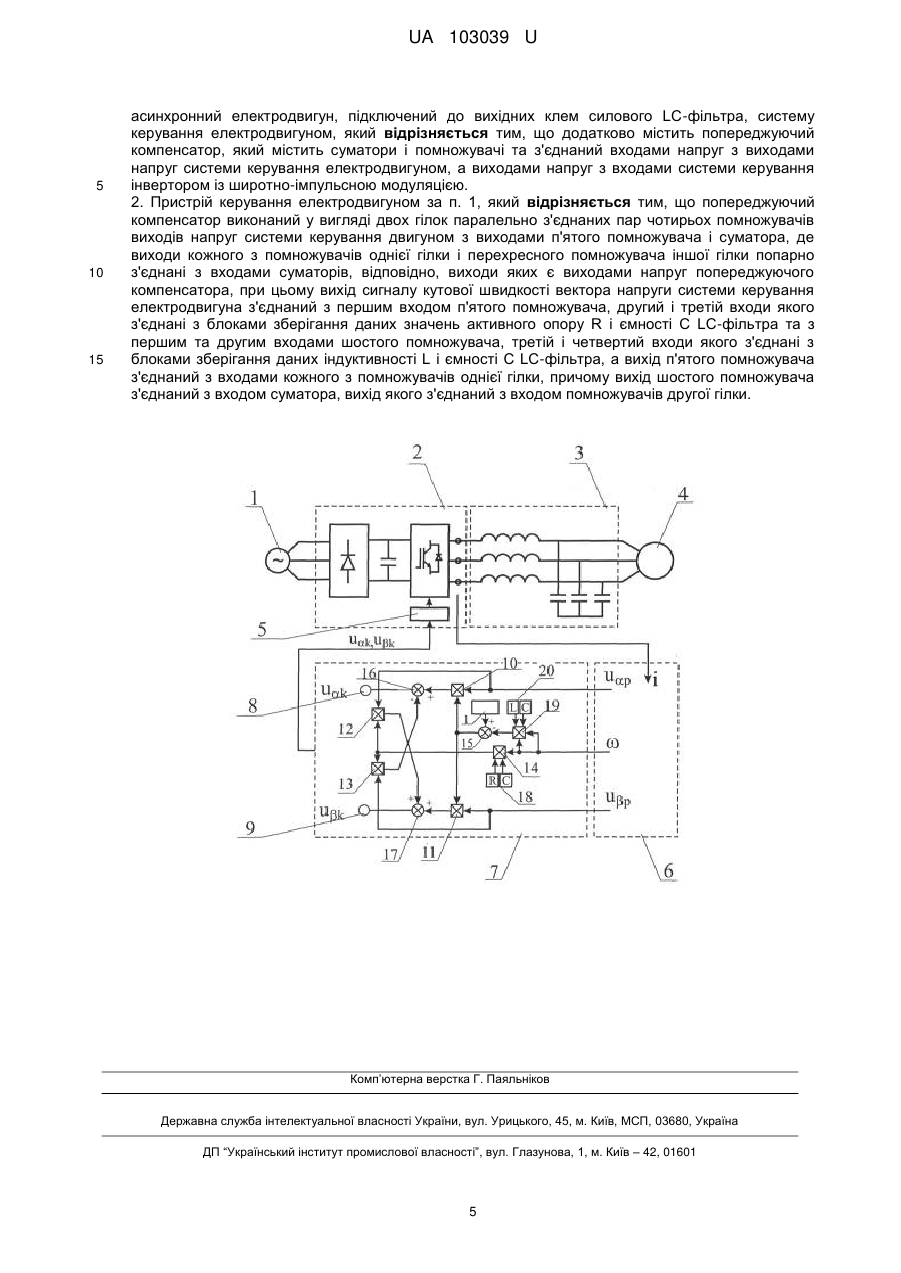
Реферат: Пристрій керування електродвигуном містить перетворювач частоти із широтно-імпульсною модуляцією (ШІМ) із системою керування інвертором із широтно-імпульсною модуляцією, силовий LC-фільтр, асинхронний електродвигун, систему керування електродвигуном. Додатково містить попереджуючий компенсатор, який містить суматори і помножувачі та з'єднаний входами напруг з виходами напруг системи керування електродвигуном, а виходами напруг з входами системи керування інвертором із широтно-імпульсною модуляцією. Попереджуючий компенсатор виконаний у вигляді двох гілок паралельно з'єднаних пар чотирьох помножувачів виходів напруг системи керування двигуном з виходами п'ятого помножувача і суматора. UA 103039 U (12) UA 103039 U UA 103039 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до електротехніки і може бути використана для керування асинхронними двигунами, що живляться від перетворювачів частоти, оснащених вихідними пасивними LC-фільтрами. Найбільш близьким за технічною суттю і результатом, що досягається, до технічного рішення, що заявляється, є пристрій керування електродвигуном [див. опис до патенту США № 7084604 В2, опубл. 01.08.2006, МПК Н02Р 21/14], що містить перетворювач частоти із широтноімпульсною модуляцією з системою керування інвертором із широтно-імпульсною модуляцією, силовий LC-фільтр, підключений до вихідних клем перетворювача частоти, асинхронний електродвигун, підключений до вихідних клем силового LC-фільтра, систему керування електродвигуном. Недоліком відомого пристрою керування електродвигуном є його висока вартість за рахунок необхідності використання дорогих комплектуючих та висока вартість налагодження системи в цілому, а також недостатньо висока швидкодія пристрою. Пояснюється це тим, що у відомому пристрої система керування вихідною напругою LCфільтра вирішує диференціальні рівняння 2-го порядку, але при цьому використовує змінні, для визначення яких треба вирішити систему диференціальних рівнянь 3-го порядку, тобто являє собою рішення системи диференціальних рівнянь 5-го порядку. Це спричиняє необхідність застосування дорогих процесорів і великого часу розробки програми. Відомий пристрій містить два регулятори: регулятор напруги статора та регулятор струму статора, що обумовлює необхідність їх настроювання та вимагає залучення фахівців. Крім того, для використання відомого пристрою в регуляторі струму необхідно робити виміри струму статора електродвигуна, що також знижує його швидкодію. В основу корисної моделі поставлена задача удосконалення пристрою керування електродвигуном, у якому шляхом введення нових елементів та нових зв'язків між елементами забезпечується збільшення швидкодії пристрою за рахунок скорочення часу розрахунку напруги, що задається, системою керування електродвигуном і відсутності необхідності настроювання регуляторів, а також зниження вартості пристрою за рахунок зниження вартості комплектуючих і налагодження пристрою. Поставлена задача вирішується тим, що у відомому пристрої керування електродвигуном, що містить перетворювач частоти із широтно-імпульсною модуляцією (ШІМ) з системою керування інвертором із широтно-імпульсною модуляцією, силовий LC-фільтр, підключений до вихідних клем перетворювача частоти, асинхронний електродвигун, підключений до вихідних клем силового LC-фільтра, систему керування електродвигуном, новим є те, що додатково містить попереджуючий компенсатор, який містить суматори і помножувачі та з'єднаний входами напруг з виходами напруг системи керування електродвигуном, а виходами напруг з входами системи керування інвертором із широтно-імпульсною модуляцією. Новим є також те, що попереджуючий компенсатор виконаний у вигляді двох гілок паралельно з'єднаних пар чотирьох помножувачів виходів напруг системи керування електродвигуном з виходами п'ятого помножувача і суматора, де виходи кожного з помножувачів однієї гілки і перехресного помножувача іншої гілки попарно з'єднані з входами суматорів, відповідно, виходи яких є виходами напруг попереджуючого компенсатора, при цьому вихід сигналу кутової швидкості вектора напруги системи керування електродвигуна з'єднаний з першим входом п'ятого помножувача, другий і третій входи якого з'єднані з блоками зберігання даних значень активного опору R і ємності С LC-фільтра та з першим та другим входами шостого помножувача, третій і четвертий входи якого з'єднані з блоками зберігання даних індуктивності L і ємності С LC-фільтра, а вихід п'ятого помножувача з'єднаний з входами кожного з помножувачів однієї гілки, при цьому вихід шостого помножувача з'єднаний з входом суматора, вихід якого з'єднаний з входом помножувачів другої гілки. Причинно-наслідковий зв'язок між сукупністю суттєвих ознак пристрою керування електродвигуном, що заявляється, і технічним результатом, що досягається, полягає в тому, що пристрій керування електродвигуном, який заявляється, а саме те, що він додатково містить попереджуючий компенсатор, який містить суматори і помножувачі та з'єднаний входами напруг з виходами напруг системи керування електродвигуном, а виходами напруг з входами системи керування інвертором із широтно-імпульсною модуляцією, у сукупності з відомими ознаками забезпечує збільшення швидкодії пристрою за рахунок скорочення часу розрахунку напруги, що задається, системою керування електродвигуном і відсутності необхідності настроювання регуляторів, а також зниження вартості пристрою за рахунок зниження вартості комплектуючих і налагодження пристрою. Додаткове введення попереджуючого компенсатора забезпечує зміну програмних сигналів напруги по амплітуді і фазі таким чином, що вони компенсують викривлення, внесені вихідним 1 UA 103039 U 5 10 15 20 25 30 35 40 45 50 55 пасивним LC-фільтром. При цьому коефіцієнт передачі системи попереджуючий компенсатор пасивний фільтр дорівнює 1. Це реалізується шляхом використання перехресних зв'язків між фазами багатофазних сигналів, що спрощується шляхом перетворення до двофазних сигналів. При роботі попереджуючого компенсатора у ньому виникають напруги, які описуються так: 2 uαk=uαp(1-LCω )-uβp(RCω), 2 uβk=uβp(1-LCω )-uαp(RCω), де: uαk, uβk - керуючі напруги, сформовані попереджуючим компенсатором в ортогональній системі координат (α, β); uαp, uβp - керуючі напруги з виходу системи керування електродвигуном в ортогональній системі координат (α, β), ω - кутова швидкість вектора напруги u, L, С, R - індуктивність, ємність, активний опір силового LC-фільтра, відповідно. Додаткове введення попереджуючого компенсатора і заявлене його виконання у вигляді двох гілок паралельно з'єднаних пар чотирьох помножувачів виходів напруг системи керування електродвигуном з виходами п'ятого помножувача і суматора, де виходи кожного з помножувачів однієї гілки і перехресного помножувача іншої гілки попарно з'єднані з входами суматорів, відповідно, виходи яких є виходами напруг попереджуючого компенсатора, причому вихід сигналу кутової швидкості вектора напруги системи керування електродвигуна з'єднаний з першим входом п'ятого помножувача, другий і третій входи якого з'єднані з блоками зберігання даних значень активного опору R і ємності С LC-фільтра та з першим та другим входами шостого помножувача, третій і четвертий входи якого з'єднані з блоками зберігання даних індуктивності L і ємності С LC-фільтра, а вихід п'ятого помножувача з'єднаний з входами кожного з помножувачів однієї гілки, причому вихід шостого помножувача з'єднаний з входом суматора, вихід якого з'єднаний з входом помножувачів другої гілки, забезпечує збільшення швидкодії пристрою за рахунок скорочення часу розрахунку напруги, що задається, системою керування електродвигуном і відсутності необхідності настроювання регуляторів, а також зниження вартості пристрою за рахунок зниження вартості комплектуючих і налагодження пристрою. Заявлена конструкція попереджуючого компенсатора є алгоритмічно простою. Технічний результат досягається за рахунок використання суматорів вихідних сигналів помножувачів прямих та перехресних зв'язків між ортогональними проекціями вектора напруги, що задається, статора електродвигуна, яку одержують з виходу системи керування електродвигуном, та використання гілок, що корегують, які враховують параметри LC-фільтра, а саме - індуктивність, ємність, активний опір, та сигнал кутової швидкості вектора напруги. Це пояснюється наведеним нижче прикладом реалізації пристрою, що заявляється. Пристрій керування електродвигуном подано на кресленні, де наведена функціональна схема пристрою, що заявляється. Пристрій керування електродвигуном містить джерело 1 трифазної напруги, з'єднане з перетворювачем 2 частоти з широтно-імпульсною модуляцією. До виходу перетворювача 2 частоти підключений вихідний пасивний силовий LC-фільтр 3, до виходу якого підключений асинхронний електродвигун 4. Перетворювач 2 частоти містить систему 5 керування інвертором з широтно-імпульсною модуляцією, що входить до складу перетворювача 2 частоти. На виході системи 6 керування електродвигуном 4 установлений попереджуючий компенсатор 7 для корекції керуючих напруг інвертора перетворювача 2 частоти. Попереджуючий компенсатор 7 містить суматори та помножувачі і з'єднаний входами напруг до виходів напруг системи 6 керування електродвигуном 4, а вихідними клемами 8, 9 напруг - до входів системи 5 керування інвертором з широтно-імпульсною модуляцією перетворювача частоти 2. Попереджуючий компенсатор 7 виконаний у вигляді двох гілок паралельно з'єднаних пар чотирьох помножувачів 10-13 виходів напруг системно керування електродвигуном 4 з виходами п'ятого помножувача 14 і суматора 15. Виходи кожного з помножувачів 10, 11 однієї гілки і перехресних помножувачів іншої гілки 13, 12 попарно з'єднані з входами суматорів 16, 17, відповідно, а виходи суматорів 16, 17 є вихідними клемами 8, 9 напруг попереджуючого компенсатора 7. При цьому третій вихід системи 6 керування електродвигуна 4 (сигнал кутової швидкості вектора напруги) з'єднаний з першим входом помножувача 14, другий і третій входи цього помножувача 14 з'єднані з блоком 18 зберігання даних активного опору R і ємності С LC-фільтра 3 LC-фільтра та з першим та другим входами шостого помножувача 19, третій і четвертий входи якого з'єднані з блоками 20 зберігання даних індуктивності L і ємності С LC-фільтра, 2 UA 103039 U 5 10 15 20 25 30 35 40 45 50 55 60 Третій вихід системи 6 керування електродвигуна 4 (сигнал кутової швидкості вектора напруги) з'єднаний з першим та другим входами помножувача 19, третій і четвертий входи цього помножувача 19 з'єднані з блоком 20 зберігання даних індуктивності L і ємності С LC-фільтра 3. Вихід помножувача 14 з'єднаний з входами кожного з помножувачів 12, 13, при цьому вихід помножувача 19 з'єднаний з входом суматора 15, а вихід його з'єднаний з входами помножувачів 10, 11. Попереджуючий компенсатор 7 може бути використаний у векторній або скалярній системі 6 керування електродвигуном 4. Між джерелом 1 трифазної напруги, перетворювачем частоти 2, вихідним пасивним силовим LC-фільтром 3, до виходу якого підключений асинхронний електродвигун 4, існують фізичні зв'язки, між системою 5 керування інвертором з широтно-імпульсною модуляцією, системою 6 керування електродвигуном, попереджуючим компенсатором 7 - програмні зв'язки, струм, що входить в систему 6 керування електродвигуном 4 і вихідна напруга системи 5 керування інвертором з широтно-імпульсною модуляцією - це фізичні зв'язки. Пристрій працює таким чином. Джерело 1 трифазної напруги живить перетворювач 2 частоти, що має вихідну напругу з широтно-імпульсною модуляцією, яку подають із виходу перетворювача 2 частоти на підключений вихідний пасивний силовий LC-фільтр 3, і далі на підключений до його виходу асинхронний електродвигун 4. Перетворювач 2 частоти має систему 6 керування електродвигуном 4 (векторну або скалярну). Попереджуючий компенсатор 7 установлений на виході системи 6 керування електродвигуном 4 для корекції керуючих напруг системи 5 керування інвертором з широтно-імпульсною модуляцією. На вхід попереджуючого компенсатора 7 подається вектор заданої напруги статора електродвигуна 4, представлений в ортогональній системі координат (α, β), який одержують з виходу системи 6 керування електродвигуном 4. Попереджуючий компенсатор 7 формує вектор напруги, що задається системою 5 керування інвертором з широтно-імпульсною модуляцією, представлений в ортогональній системі координат (α, β) таким чином, щоб компенсувати амплітудо-частотні характеристики (АЧХ) і фазочастотні характеристики (ФЧХ) вихідного пасивного силового LC-фільтра 3 та одержати напругу статора асинхронного електродвигуна 4 без перекручувань по амплітуді і фазі щодо заданої напруги статора електродвигуна 4, сформованої системою 6 керування електродвигуном 4. Компенсація амплітудо-частотних характеристик і фазочастотних характеристик вихідного пасивного силового LC-фільтра 3 відбувається за рахунок використання перехресних зв'язків між ортогональними проекціями вектора заданої напруги, які одержують з виходу системи 6 керування електродвигуном 4, сигналу кутової швидкості вектора напруги, який одержують з третього виходу системи 6 керування електродвигуна 4, та параметрів вихідного пасивного силового LC-фільтра 3, які знаходяться в блоці 18 зберігання даних активного опору R і ємності С LC-фільтра та блоці 20 зберігання даних індуктивності L і ємності С LC-фільтра 3. Ортогональну проекцію по осі α вектора заданої напруги статора електродвигуна 4, яку одержують з виходу системи 6 керування електродвигуном 4, пропускають через помножувач 10 з виходом гілки,що корегує, яка містить суматор 15, помножувач 19, блок 20 зберігання даних індуктивності L і ємності С LC-фільтра 3. Далі формується перехресний зв'язок, яким є вихід помножувача 13, а входами йому відповідають ортогональна проекція по осі β вектора заданої напруги статора електродвигуна 4, що одержують з виходу системи 6 керування електродвигуном 4, та вихід другої гілки, що корегує, яка містить помножувач 14 і блок 18 зберігання даних активного опору R і ємності С LC-фільтра 3. Вихідна напруга, що подається на вихідну клему 8 попереджуючого компенсатора 7 по осі а, формується суматором 16, входами якого є вихід помножувача 10 та помножувача 13 перехресного зв'язку з від'ємним знаком. Ортогональну проекцію по осі β вектора заданої напруги статора електродвигуна 4, яку одержують з виходу системи 6 керування електродвигуном 4, пропускають через помножувач 11 з виходом гілки, що корегує, яка містить суматор 15, помножувач 19, блок 20 зберігання даних індуктивності L і ємності С LC-фільтра 3. Далі формується перехресний зв'язок, яким є вихід помножувача 12, а входами йому відповідають ортогональна проекція по осі α вектора заданої напруги статора електродвигуна 4, яку одержують з виходу системи 6 керування електродвигуном 4, та вихід другої гілки, що корегує, яка містить помножувач 14 і блок 18 зберігання даних активного опору R і ємності С LC-фільтра 3. Вихідна напруга, що подається на вихідну клему 9 попереджуючого компенсатора 7 по осі β, формується суматором 17, входами якого є вихід помножувача 11 та помножувача 12 перехресного зв'язку з позитивним знаком. В гілках, що корегують, які містять суматор 15, помножувач 19, блок 20 зберігання даних індуктивності L і ємності С LC-фільтра 3 або помножувач 14, блок 18 зберігання даних активного 3 UA 103039 U 5 10 15 20 25 30 35 40 45 50 опору R і ємності С LC-фільтра 3, входами є третій вихід системно керування електродвигуна4 (сигнал кутової швидкості вектора напруги) та параметри індуктивності, ємності, активного опору LC-фільтру, які зберігаються в блоці 18 зберігання даних активного опору R і ємності С LC-фільтра 3 та блоці 20 зберігання даних індуктивності L і ємності С LC-фільтра 3. При роботі заявленого пристрою, у ньому виникають напруги, які описується рівняннями: 2 uαk=uαp(1-LCω )-uβp(RCω), 2 uβk=uβp(1-LCω )-uαp(RCω), де: uαk, uβk - керуючі напруги, сформовані попереджуючим компенсатором 7, в ортогональній системі координат (α, β); uαp, uβp - керуючі напруги з виходу системи 6 керування електродвигуном 4 в ортогональній системі координат (α, β), ω - кутова швидкість вектора напруги u, L, С, R - індуктивність, ємність, активний опір силового LC-фільтра 3, відповідно. Керуюча напруга uk, сформована попереджуючим компенсатором 7, по ортогональній осі , реалізується з різниці ортогональної проекції напруги на вісь up, помноженої на різницю одиниці і добутку індуктивності L, ємності С LC-фільтра 3 та кутової швидкості вектора напруги зведеної у квадрат, з ортогональною проекцією напруги на вісь up, помноженої на активний опір R, ємність С і кутову швидкість вектора напруги . Керуюча напруга uk, сформована попереджуючим компенсатором 7 по ортогональній осі , реалізується із суми ортогональної проекції напруги на вісь up, помноженої на різницю одиниці і добутку індуктивності L, ємності С LC-фільтра 3 й кутової швидкості вектора напруги , зведеної у квадрат, з ортогональною проекцією напруги на вісь up, помноженої на активний опір R, ємність С і кутову швидкість вектора напруги . Параметрами попереджуючого компенсатора 7 є: вхідні величини: вектор заданої напруги статора електродвигуна 4, представлений в ортогональній системі координат (, ), одержаний з виходу системи 6 керування електродвигуном 4, кутова швидкість вектора напруги, параметри вихідного пасивного силового LC-фільтра 3, а саме L – індуктивність, С - ємність і R - активний опір; вихідні величини: вектор напруги, що задається, перетворювача 2 частоти, представлений в ортогональній системі координат (, ). Попереджуючий компенсатор 7 може бути використаний у векторній або скалярній системі керування електродвигуном. Система 6 керування електродвигуном 4 може бути виготовлена за різними схемами. Вона може бути або векторною або скалярною. Приклад векторного виконання такої системи наведений у "Vas P., Sensorless vector and direct torque control, стор. 729, Oxford, New York, Tokyo: Oxford University Press, 1998". Приклад скалярного виконання такої системи наведений у "Булгаков А.А, Частотное управление асинхронными двигателями, стор. 216, Μ., Энергоиздат, 1982". Таким чином, завдяки використанню суматорів вихідних сигналів помножувачів прямих (виходи помножувачів 10, 11) та перехресних зв'язків (виходи помножувачів 12, 13) між ортогональними проекціями вектора заданої напруги статора електродвигуна, яку одержують з виходу системи 6 керування електродвигуном 4, та використанню гілок, що коригують, які враховують параметри LC-фільтра 3 (індуктивність, ємність, активний опір) та сигнал кутової швидкості вектора напруги, в заявленому пристрої керування електродвигуном забезпечується більша швидкодія за рахунок скорочення часу розрахунку напруги, що задається, системою 6 керування електродвигуном 4 і відсутності необхідності настроювання регуляторів, а також зниження вартості пристрою за рахунок зниження вартості комплектуючих і налагодження пристрою, ніж у пристрої, обраному як прототип. Як показує розрахунок і підтверджує експеримент, заявлений пристрій керування електродвигуном дозволяє підвищити швидкодію пристрою приблизно на 10 %, що дає можливість його ефективно застосовувати. Корисна модель, що заявляється, може бути виготовлена на існуючому обладнанні з використанням відомих матеріалів і засобів, що підтверджує промислову придатність об'єкта. 55 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 60 1. Пристрій керування електродвигуном, що містить перетворювач частоти із широтноімпульсною модуляцією (ШІМ) із системою керування інвертором із широтно-імпульсною модуляцією, силовий LC-фільтр, підключений до вихідних клем перетворювача частоти, 4 UA 103039 U 5 10 15 асинхронний електродвигун, підключений до вихідних клем силового LC-фільтра, систему керування електродвигуном, який відрізняється тим, що додатково містить попереджуючий компенсатор, який містить суматори і помножувачі та з'єднаний входами напруг з виходами напруг системи керування електродвигуном, а виходами напруг з входами системи керування інвертором із широтно-імпульсною модуляцією. 2. Пристрій керування електродвигуном за п. 1, який відрізняється тим, що попереджуючий компенсатор виконаний у вигляді двох гілок паралельно з'єднаних пар чотирьох помножувачів виходів напруг системи керування двигуном з виходами п'ятого помножувача і суматора, де виходи кожного з помножувачів однієї гілки і перехресного помножувача іншої гілки попарно з'єднані з входами суматорів, відповідно, виходи яких є виходами напруг попереджуючого компенсатора, при цьому вихід сигналу кутової швидкості вектора напруги системи керування електродвигуна з'єднаний з першим входом п'ятого помножувача, другий і третій входи якого з'єднані з блоками зберігання даних значень активного опору R і ємності С LC-фільтра та з першим та другим входами шостого помножувача, третій і четвертий входи якого з'єднані з блоками зберігання даних індуктивності L і ємності С LC-фільтра, а вихід п'ятого помножувача з'єднаний з входами кожного з помножувачів однієї гілки, причому вихід шостого помножувача з'єднаний з входом суматора, вихід якого з'єднаний з входом помножувачів другої гілки. Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюElectric motor control device
Автори англійськоюSolomakha Oleksandr Viktorovych
Назва патенту російськоюУстройство управления электродвигателем
Автори російськоюСоломаха Александр Викторович
МПК / Мітки
МПК: H02P 21/14
Мітки: керування, пристрій, електродвигуном
Код посилання
<a href="https://ua.patents.su/7-103039-pristrijj-keruvannya-elektrodvigunom.html" target="_blank" rel="follow" title="База патентів України">Пристрій керування електродвигуном</a>
Пристрій керування низьковольтним електродвигуном постійного струму середньої потужності
Номер патенту: 84349
Опубліковано: 10.10.2008
Автор: Семігін Яків Львович
МПК: H02K 15/00
Мітки: пристрій, середньої, струму, низьковольтним, керування, постійного, електродвигуном, потужності
Формула / Реферат:
Пристрій керування низьковольтним електродвигуном постійного струму середньої потужності, що містить перетворювач частоти в напругу та електродвигун, який відрізняється тим, що додатково містить блок живлення, блок керування, блок автоматичного гальмування та імпульсний датчик частоти обертання електродвигуна, при цьому вихід блока живлення сполучений з першим входом блока керування, перший вихід якого сполучений з входом блока автоматичного...
Пристрій для керування низьковольтним електродвигуном постійного струму середньої потужності

Номер патенту: 25731
Опубліковано: 27.08.2007
Автор: Семігін Яків Львович
МПК: H02K 15/00
Мітки: постійного, електродвигуном, потужності, середньої, струму, низьковольтним, пристрій, керування
Формула / Реферат:
Пристрій для керування низьковольтним електродвигуном постійного струму середньої потужності, що містить перетворювач частоти в напругу та електродвигун, який відрізняється тим, що він додатково містить блок живлення, блок керування, блок автоматичного гальмування та імпульсний датчик частоти обертання електродвигуна, при цьому вихід блока живлення сполучений з першим входом блока керування, перший вихід якого сполучений з входом блока...
Пристрій для керування електродвигуном
Номер патенту: 1590
Опубліковано: 15.01.2003
Автори: Пасмурских Олександр Олексійович, Дубовськой Євген Володимирович, Долженко Віктор Володимирович
МПК: H02P 21/00, H02P 6/00, H02P 29/00, H02P 1/00, H02P 3/00, H02P 13/00
Мітки: пристрій, керування, електродвигуном
Формула / Реферат:
1. Пристрій для керування електродвигуном, що містить принаймні одне коло живлення з блоком комутації, блок керування і датчик контролю, блок комутації встановлений з можливістю підключення його входу до джерела живлення, а виходу - до електродвигуна, блок керування зв'язаний із блоком комутації і встановлений з можливістю підключення його входу до джерела живлення, а вихід датчика контролю з'єднаний з відповідним входом блока керування,...
Пристрій керування трифазним асинхронним електродвигуном
Номер патенту: 75173
Опубліковано: 15.03.2006
Автор: Зінченко Євген Олександрович
МПК: H02P 1/26
Мітки: трифазним, асинхронним, керування, пристрій, електродвигуном
Формула / Реферат:
Пристрій керування трифазним асинхронним електродвигуном, фази статорної обмотки якого з'єднані в зірку, і кожна з них підключена до фаз живильної мережі через комутатор, виконаний за схемою безпосереднього перетворювача частоти, який відрізняється тим, що між комутатором і фазами статорної обмотки електродвигуна додатково введені електричні мости, кожний з яких складається із чотирьох послідовно з’єднаних у замкнений контур ключів, загальні...
Спосіб керування трифазним електродвигуном
Номер патенту: 52069
Опубліковано: 16.12.2002
Автори: Кац Олександр Борисович, Зінченко Олександр Іванович
МПК: H02P 21/00
Мітки: керування, електродвигуном, спосіб, трифазним
Формула / Реферат:
Спосіб керування трифазним електродвигуном шляхом одночасного переключення в прямій послідовності стосовно фаз мережі усіх фаз його статорної обмотки зі зміною їхньої полярності на протилежну, який відрізняється тим, що зазначені комутації виконують з частотою у функції заданого закону зміни частоти обертання ротора.
Попередній патент: Спосіб зниження надмірної ваги
Наступний патент: Спосіб виявлення деяких лікарських засобів, які містять в своїй структурі третинну аміногрупу
Випадковий патент: Спосіб вилучення і акумуляції фтору із природних фторовмісних вод