Пристрій для визначення затримок транспортних засобів на нерегульованому перехресті
Формула / Реферат
Пристрій для визначення затримок транспортних засобів на нерегульованому перехресті, що містить скануючий блок, що включає лазерний випромінювач, вузол розгортки та перший дискретний сканістор, фотоприймачі кожної смуги руху, перетворювач сигналів фотоприймачів і обчислювальний пристрій, при цьому вихід лазерного випромінювача підключений до входу вузла розгортки, другий вхід якого сполучений з виходом першого дискретного сканістора, а вихід вузла розгортки підключений до першого входу обчислювального пристрою, другий вхід якого сполучений з виходом перетворювача сигналів фотоприймачів, виходи яких підключені до входів перетворювача сигналів, який відрізняється тим, що в нього введені фотоприймач реперного сигналу, перетворювач реперного сигналу, блок керування сканісторами та другий дискретний сканістор, причому вихід фотоприймача реперного сигналу сполучений з входом перетворювача реперного сигналу та першим входом блока керування сканісторами, другий вхід якого сполучений з виходом вузла розгортки, а виходи блока керування сканісторами сполучені з відповідними входами першого та другого дискретних сканісторів, при цьому вихід другого дискретного сканістора сполучений з третім входом вузла розгортки, а вихід перетворювача реперного сигналу з відповідним входом обчислювального пристрою.
Текст
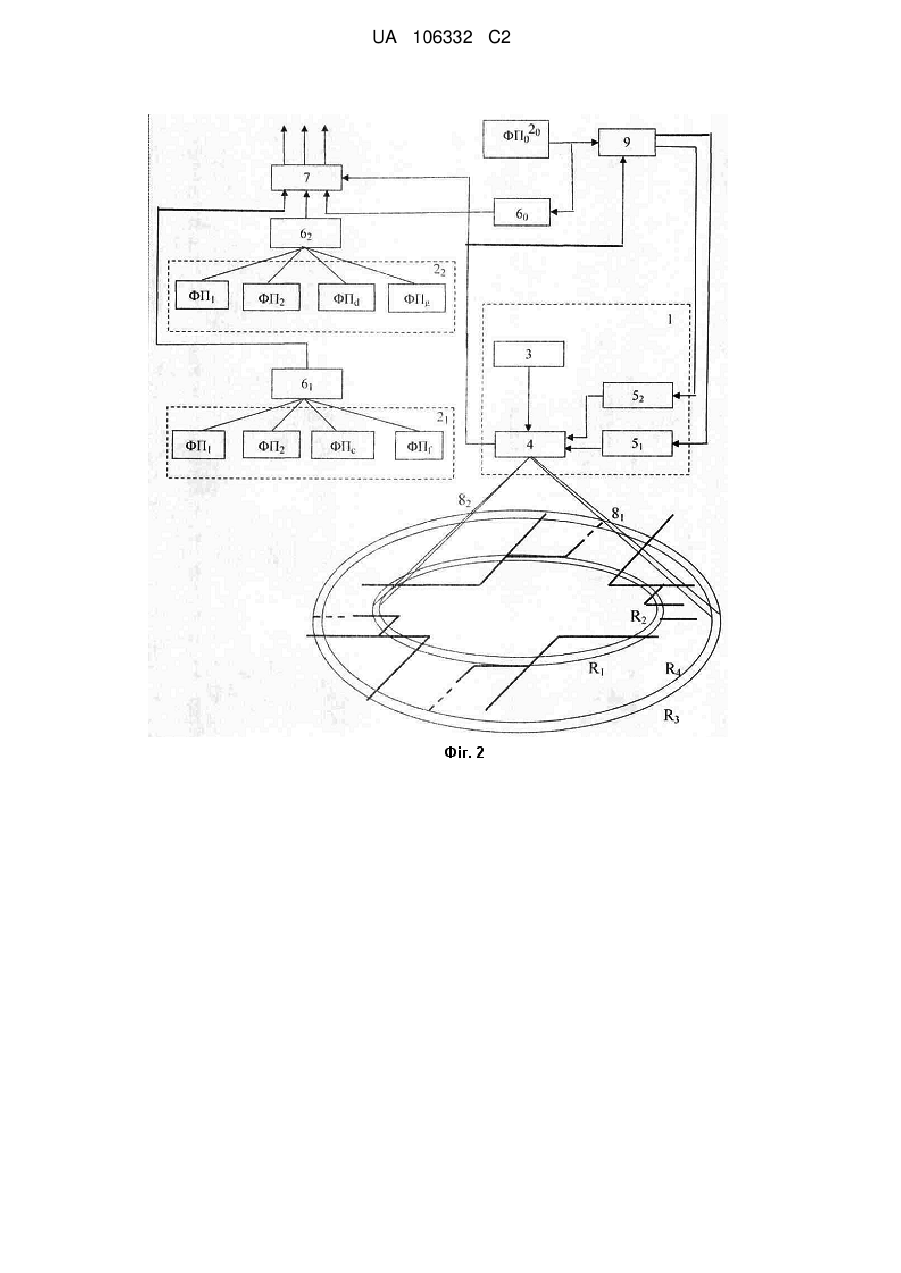
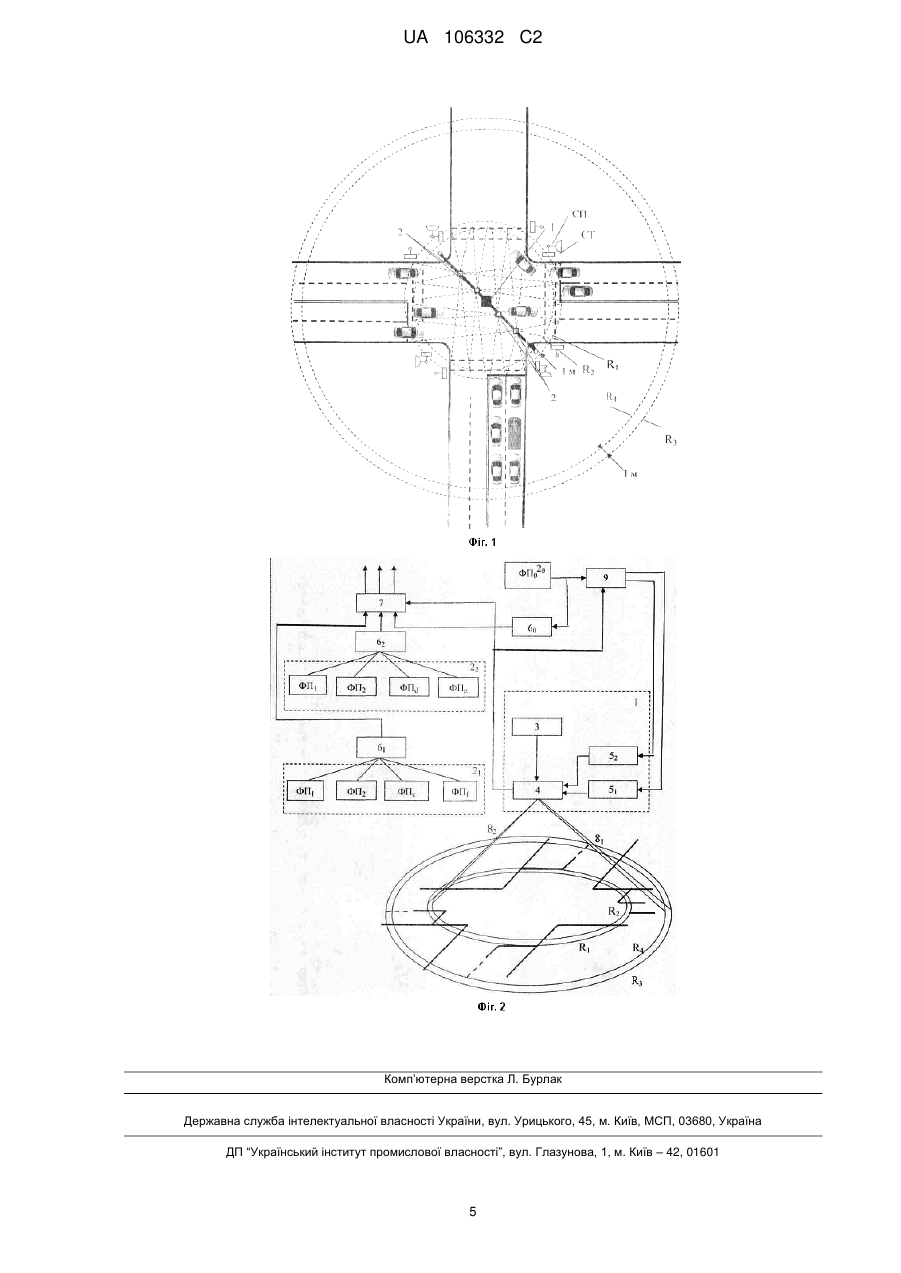
Реферат: Винахід належить до систем регулювання дорожнього руху (ДР) і може бути використаний при розробці агрегатної системи засобів управління ДР, АСУ-ДР, а також в системах інформаційного забезпечення завантаження перехресть ВДМ. Пристрій для визначення затримок транспортних засобів на нерегульованому перехресті, що містить скануючий блок, лазерний випромінювач, вузол розгортки, два дискретні сканістори, фотоприймачі кожної смуги руху та реперного сигналу, перетворювачі сигналів фотоприймачів та реперного сигналу, обчислювальний пристрій та блок керування сканісторами, при цьому вихід лазерного випромінювача підключений до входу вузла розгортки, інші входи якого сполучені з виходами першого та другого дискретних сканісторів, а вихід вузла розгортки підключений до одного із входів обчислювального пристрою, інші входи якого сполучені з виходом і перетворювачів сигналів фотоприймачів та реперного сигналу, а входи підключені до виходів відповідних фотоприймачів, причому вихід фотоприймача реперного сигналу одночасно сполучений з першим входом блока керування сканісторами, другий вхід якого сполучений з виходом вузла розгортки, а виходи блока керування сканісторами сполучені з відповідними входами першого та другого дискретних сканісторів. UA 106332 C2 (12) UA 106332 C2 UA 106332 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід належить до систем регулювання дорожнього руху (ДР) і може бути використаний при розробці агрегатної системи засобів управління ДР, АСУ-ДР, а також в системах інформаційного забезпечення завантаження перехресть ВДМ. Цей пристрій одночасно може бути використаний для визначення основних параметрів транспортних потоків (ТП) в зоні перехрестя: моменту проїзду транспортним засобом (ТЗ) контрольованої зони (КЗ) та перехрестя в цілому, швидкості, типу і напрямку руху ТЗ, їх інтенсивності руху по кожній смузі за будь-який проміжок часу, інтервалів рухів між ТЗ по кожній смузі нерегульованого перехрестя, а також транспортних затримок. Відомий спосіб визначення транспортних затримок на регульованому перехресті та спрощена схема пристрою, що його реалізує (опис до патенту на корисну модель за заявкою u 201307016 від 04.06.2013), який містить: скануючий блок 1, що має у своєму складі лазерний випромінювач 3 вузькоспрямованого інфрачервоного променя і вузол розгортки 4, які формують двопроменеве 81 та 82 конусне покрокове сканування зони перехрестя за допомогою оптичного відхиляючого пристрою 5 (дискретного сканістора), фотоприймачі 2 (ФП і) кожної смуги руху, перетворювач 6 сигналу кожного ФПі та обчислювальний пристрій 7, при цьому вихід лазерного випромінювача 3 підключений до входу вузла розгортки 4, другий вхід якого сполучений з виходом дискретного сканістора 5, а вихід вузла розгортки підключений до одного із входів обчислювального пристрою 7, інший вхід якого сполучений з виходом перетворювача 6 сигналів фотоприймачів ФПі 2, виходи яких підключені до входів перетворювача сигналів 6. Цей спосіб та приведений спрощений варіант пристрою є найбільш близькими до пристрою, що заявляється, і вибрані як найближчий аналог. Недоліком цього пристрою є вузькі функціональні можливості і низька точність, оскільки він не дозволяє у повному обсязі визначити затримки ТЗ на нерегульованому перехресті. Низька точність визначення транспортних затримок як на регульованому, так і нерегульованому перехрестях обумовлена тим, що існуючий пристрій не дає змоги врахувати затримки проїзду ТЗ зони самого перехрестя, які виникають у випадках або поворотів ТЗ направо і наліво, або і з будь-яких інших причин, а також тим, що затримки розраховуються без урахування типу та габаритів кожного ТЗ. В основу запропонованого пристрою поставлена задача розширення функціональних можливостей при одночасному підвищенні точності визначення транспортних затримок на нерегульованому перехресті. Поставлена задача вирішується тим, що у запропонований пристрій покладено конусне покрокове сканування одночасно двома вузькоспрямованими лазерними променями інфрачервоного діапазону тимчасово всіх підходів і виходів перехрестя, що дає можливість сформувати вхідні і вихідні межі КЗ та забезпечити визначення комплексу вищевказаних параметрів ТП по кожній смузі руху в залежності від результатів сканування. На Фіг. 1 представлена схема, яка розкриває основні відмінні особливості запропонованого пристрою. Відповідно до запропонованого пристрою, розгортка лазерного променя здійснюється скануючим блоком 1, який розташовується над перехрестям на спеціальному кронштейні в точці, що відповідає геометричному центру перехрестя. У скануючому блоці, залежно від висоти його розміщення, одну з оптичних осей розгортки підбирають так, щоб перший лазерний промінь описував конусну поверхню з колом на проїжджій частині перехрестя (R1) в області "стоп-ліній" всіх його підходів. До складу скануючого блока входить оптичний відхиляючий пристрій (дискретний сканістор), який забезпечує відхилення осі першого лазерного променя в необхідне друге положення, при якому радіус кола (R2) на поверхні проїзної частини зменшується на задану величину (наприклад, на 1м). Таким чином, блок сканування на кожному наступному періоді сканування змінює розгортку першого лазерного променя з одної оптичної осі на іншу та описує в зоні стоп-ліній на поверхні перехрестя два концентричні кола з різницею радіусів (R1-R2=1 м) та формує вихідну межу КЗ. Другий оптичний промінь лазерної розгортки формується у одній площині з першим, але зі зміщенням на 180° по колу розгортки (див. фіг. 2) і формує вхідну межу КЗ. Цей промінь, як і перший, за допомогою відповідного дискретного сканістора 52 на кожному наступному періоді сканування змінює одну оптичну вісь розгортки (з радіусом кола R3 на проїжджій частині перехрестя) на іншу (з радіусом кола R4) і формує два концентричних кола різницею радіусів R3-R4=1 м. Оптичні фотоприймачі 2і (ФПс) та 22 (ФПd) в процесі розгортки лазерних променів 8 1 та 82 по одному з кіл на вході і виході КЗ послідовно сприймають сигнали, відбиті від ТЗ, що рухаються по різних смугах руху як на підходах, так і на виходах перехрестя. 1 UA 106332 C2 5 10 Фіксацію ТЗ, що в'їжджають в КЗ, здійснюють по їх задніх бамперах при пересіченні одного з кіл (наприклад R3), при цьому завдяки періодичному скануванню зі зміною оптичної осі лазерного променя (з радіуса R3 на R4 і навпаки), визначається момент в'їзду, швидкість, довжина, тип, кількість і послідовність ТЗ, що реально в'їхали в КЗ по кожній смузі руху за період вимірювань. Фіксація ТЗ, що в'їжджають в КЗ по смугах руху другорядної дороги на входах до нерегульованого перехрестя, здійснюється з урахуванням часу проїзду КЗ без затримки відповідного типу ТЗ, що стало можливим завдяки періодичному скануванню зі зміною оптичної осі лазерного променя як вхідної, так і вихідної границі КЗ. При цьому почергова з високою швидкістю зміни радіусів сканування дозволяє точно визначити час перебування та переміщення ТЗ у КЗ. Момент виїзду ТЗ з КЗ фіксується по пересіченню заднім бампером ТЗ T кола з радіусом R2, а сумарна транспортна затримка j перебування ТЗ, що рухаються по кожній 7-й смузі руху другорядної дороги в КЗ на вході перехрестя накопичується з кожним періодом t сканування і за час виміру Tв визначається як k b f 1 l1 Tj t ncт nl t l 15 , (1) де k - число періодів сканування за час виміру, рівне k Tв / t ; Tв - період визначення транспортної затримки (час виміру); nст - довжина черги ТЗ в КЗ по j-й смузі руху, що в'їхали та повністю її покинули за час виміру Tв ; 20 25 nl - кількість ТЗ l -го типу, що в'їхали та повністю покинули КЗ за час виміру Tв ; t l - час проїзду без затримки КЗ кожним конкретним l -м типом ТЗ. T Потім визначають сумарну транспортну затримку Пj проїзду кожним типом ТЗ, що рухається по другорядній дорозі самого перехрестя з j -ої смуги руху (від кола сканування з R2 t на вході перехрестя до кола з R3 на його виході), як різницю між реальним часом проїзду р та часом проїзду без затримки tП зони перехрестя l -м типом ТЗ у заданому напрямку k Tj t nl ( tp tП )l 30 l1 (2) Ця сума визначається для тих ТЗ, що за час виміру в'їхали в КЗ та повністю покинули зону перехрестя. (t t ) 0 T Якщо різниця p П l , її враховують в загальній складовій j , в іншому випадку при ( tp tП )l 0 ця складова не враховується. Загальну транспортну затримку Tгі проїзду кожним типом ТЗ, що рухається по головній дорозі в зоні перехрестя по кожній і-й смузі руху (від кола сканування з R3 на вході перехрестя t до кола з R3 на його виході) визначають як різницю між реальним часом проїзду pг та часом проїзду без затримки tПг вказаної зони (зони перехрестя) l-м типом ТЗ у заданому напрямку b Tгі nl ( tpг tПг )l 35 40 l1 . (3) При цьому враховуються затримки тільки тих ТЗ, що за час виміру в'їхали та повністю виїхали з зони перехрестя. Реальний час проїзду зони перехрестя кожним ТЗ фіксується за моментами перетинання їх задніми бамперами вказаних меж зони перехрестя, причому визначається він з високою точністю з дискретністю періоду сканування одночасно по всіх смугах перехрестя. Загальна затримка ТЗ по j -ій смузі руху другорядної дороги за вибраний час Tв визначається як сума Tj Tj Tj . (4) 2 UA 106332 C2 5 10 t А середня затримка j ТЗ для j -ої смуги руху другорядної дороги за час виміру Tв визначається за формулою Е j t j nnpj ,(5) n де npj - кількість ТЗ, що за час виміру повністю проїхали зону перехрестя по j -й смузі руху другорядної дороги. Таким же чином визначається середня затримка t гі ТЗ, що за час виміру проїхали зону перехрестя по і -й смузі руху головної дороги Т tгі гі nnpі , (6) nnpі де - кількість ТЗ, що за час виміру повністю проїхали зону перехрестя по і -й смузі руху головної дороги. Потім за результатами виміру середніх затримок ТЗ по кожній смузі руху на усіх підходах до перехрестя визначають середню транспортну затримку t п для всього перехрестя: m c t nnpj tгіnnpi tп 15 20 25 30 35 40 45 j1 m j i1 c nnpj nnpi j1 i1 , (7) де m - число смут руху на підходах до перехрестя по другорядній дорозі; c - число смуг руху на підходах до перехрестя по головній дорозі. Такий підхід у визначенні транспортної затримки в зоні всього перехрестя (від входу в КЗ на підходах до перехрестя R3 до одного з кіл розгортки R3 на виході з перехрестя) дозволяє більш точно врахувати затримки окремих ТЗ в зоні всього перехрестя, що пов'язані з очікуванням проїзду наліво при наявності прямих зустрічних ТП, та при поворотах направо для пропуску пішохідних потоків, або взагалі при низький швидкості перетину перехрестя по головній дорозі окремими ТЗ. Крім того, наявність подвійного сканування на вході (R3, R4) перехрестя та на виході з КЗ (R1, R2) дає можливість точно визначити тип ТЗ в будь-який зоні перехрестя, а значить, і напрямок його руху, і таким чином при відомих значеннях часу проїзду без затримки різних типів ТЗ у різних напрямках руху точно врахувати їх затримки при перетині зони перехрестя. Все це дозволяє суттєво підвищити точність визначення транспортної затримки на нерегульованому перехресті. На Фіг. 2 представлена структурна схема пристрою для визначення транспортних затримок на нерегульованому перехресті. Скануючий блок 1 має у своєму складі лазерний випромінювач 3 вузько-спрямованого інфрачервоного променя і вузол розгортки 4, які формують двопроменеве конусне покрокове сканування зони перехрестя за допомогою оптичних відхиляючих пристроїв 5] та 5 2 (дискретних сканісторів), що змінюють положення кутів розгортки променів 8і та 82, яке здійснюється в реперній точці по черзі на кожному періоді сканування. Відбиті від ТЗ оптичний сигнал (при наявності ТЗ в зоні, що контролюється, даної i -ої або j ої смуги) вловлюються відповідними фотоприймачами 21 (ФПc) смуг руху на вході перехрестя та 22 (ФПd) смуг руху на виході перехрестя. Перетворювачі 61 та 62 сигналів кожного ФЦ, відповідної смуги руху, перетворюють сигнали в імпульсно-цифрові коди, які вводяться в обчислювальний пристрій 7. Обидва оптичні промені 81 та 82 формуються вузлом розгортки у одній площині зі зміщенням на півперіоду (180°), що дає змогу фіксувати кожний з них у реперній точці і чітко розпізнавати відбиті від ТЗ сигнали на вході і виході з КЗ та перехресті в цілому. Для цього фотоприймач 20 (ФП0) реперного сигналу у момент проходження променів 81 та 82 реперної точки видає сигнал на входи перетворювача 6 0 реперного сигналу та блок керування сканісторами 9. Сигнали з виходів блока керування сканісторами 9 подаються на входи відповідних сканісторів 51 та 52, які сигналами зі своїх виходів діють на вузол розгортки 4 та змінюють кути нахилу променів 81 та 82 при переході реперної точки. 3 UA 106332 C2 5 10 15 20 25 30 35 Зміна і чергування кутів нахилу розгортки (з R1 на R2 та з R3 на R4 або навпаки) необхідна для однозначного визначення положення ТЗ щодо кіл сканування, типу і напрямку руху ТЗ в КЗ і зоні перехрестя по кожній смузі руху. Сигнали з виходів вузла розгортки 4 та перетворювача 6 0 фотоприймача 20 реперного сигналу подаються на відповідні входи обчислювального пристрою 7 для чіткого визначення положення кожного променя по смугах руху відносно реперної точки. Внаслідок того, що в обчислювальний пристрій закладаються алгоритм, правила і константи, відповідні діапазони зміни інтервалів руху без затримки різних типів ТЗ в КЗ і зоні перехрестя при всіляких змінах напрямків їх руху по смугах перехрестя, з'являється можливість більш точного визначення транспортних затримок. Перевагою запропонованого пристрою також є те, що він дозволяє одночасно з затримками визначати ряд окремих параметрів руху ТП в зоні перехрестя: швидкості руху ТЗ, їх довжину, інтервали руху, інтенсивності ТП по кожній смузі за будь-яке фіксоване значення часу, причому здійснюється це одним загальним пристроєм, розташованим в зоні перехрестя, що контролюється. Таким чином, запропонований пристрій дає можливість одержання найбільш повного комплексу інформації для контролю в системах визначення завантаження перехресть ВДМ і подальшого оперативного управління рухом на перехрестях міста. ФОРМУЛА ВИНАХОДУ Пристрій для визначення затримок транспортних засобів на нерегульованому перехресті, що містить скануючий блок, що включає лазерний випромінювач, вузол розгортки та перший дискретний сканістор, фотоприймачі кожної смуги руху, перетворювач сигналів фотоприймачів і обчислювальний пристрій, при цьому вихід лазерного випромінювача підключений до входу вузла розгортки, другий вхід якого сполучений з виходом першого дискретного сканістора, а вихід вузла розгортки підключений до першого входу обчислювального пристрою, другий вхід якого сполучений з виходом перетворювача сигналів фотоприймачів, виходи яких підключені до входів перетворювача сигналів, який відрізняється тим, що в нього введені фотоприймач реперного сигналу, перетворювач реперного сигналу, блок керування сканісторами та другий дискретний сканістор, причому вихід фотоприймача реперного сигналу сполучений з входом перетворювача реперного сигналу та першим входом блока керування сканісторами, другий вхід якого сполучений з виходом вузла розгортки, а виходи блока керування сканісторами сполучені з відповідними входами першого та другого дискретних сканісторів, при цьому вихід другого дискретного сканістора сполучений з третім входом вузла розгортки, а вихід перетворювача реперного сигналу з відповідним входом обчислювального пристрою. 4 UA 106332 C2 Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Автори англійськоюDenysenko Oleh Ivanovych
Автори російськоюДенисенко Олег Васильевич
МПК / Мітки
МПК: G08G 1/09
Мітки: нерегульованому, транспортних, перехресті, затримок, визначення, пристрій, засобів
Код посилання
<a href="https://ua.patents.su/7-106332-pristrijj-dlya-viznachennya-zatrimok-transportnikh-zasobiv-na-neregulovanomu-perekhresti.html" target="_blank" rel="follow" title="База патентів України">Пристрій для визначення затримок транспортних засобів на нерегульованому перехресті</a>
Пристрій для визначення затримок транспортних засобів на нерегульованому перехресті
Номер патенту: 88659
Опубліковано: 25.03.2014
Автор: Денисенко Олег Васильович
МПК: G08G 1/09
Мітки: затримок, пристрій, перехресті, нерегульованому, визначення, засобів, транспортних
Формула / Реферат:
Пристрій для визначення затримок транспортних засобів на нерегульованому перехресті, що містить скануючий блок, лазерний випромінювач, вузол розгортки, дискретний сканістор, фотоприймачі кожної смуги руху, перетворювач сигналів фотоприймачів і обчислювальний пристрій, при цьому вихід лазерного випромінювача підключений до входу вузла розгортки, другий вхід якого сполучений з виходом дискретного сканістора, а вихід вузла розгортки підключений...
Спосіб визначення затримок транспортних засобів на нерегульованому перехресті
Номер патенту: 88590
Опубліковано: 25.03.2014
Автор: Денисенко Олег Васильович
МПК: G08G 1/09
Мітки: визначення, нерегульованому, перехресті, засобів, спосіб, транспортних, затримок
Формула / Реферат:
Спосіб визначення транспортних затримок на нерегульованому перехресті, оснований на фіксації транспортних засобів, що в'їжджають у контрольовану зону і виїжджають з неї по їх задніх бамперах, із затримкою, рівною середньому часу проїзду транспортними засобами контрольованої зони, визначенні поточної довжини черги транспортних засобів в контрольованій зоні, визначенні сумарної за період вимірювання транспортної затримки в контрольованій зоні...
Спосіб визначення затримок транспортних засобів на нерегульованому перехресті
Номер патенту: 105751
Опубліковано: 10.06.2014
Автор: Денисенко Олег Васильович
МПК: G08G 1/065, G08G 1/056
Мітки: нерегульованому, транспортних, спосіб, визначення, перехресті, засобів, затримок
Формула / Реферат:
Спосіб визначення транспортних затримок на нерегульованому перехресті, заснований на фіксації транспортних засобів, що в'їжджають у контрольовану зону і виїжджають з неї по їх задніх бамперах, із затримкою, рівною середньому часу проїзду транспортними засобами контрольованої зони, визначенні поточної довжини черги транспортних засобів в контрольованій зоні, визначенні сумарної транспортної затримки за період вимірювання в контрольованій зоні...
Пристрій для визначення транспортних затримок на регульованому перехресті
Номер патенту: 89793
Опубліковано: 25.04.2014
Автори: Левтеров Андрій Іванович, Денисенко Олег Васильович
МПК: G08G 1/09
Мітки: регульованому, затримок, пристрій, перехресті, транспортних, визначення
Формула / Реферат:
Пристрій для визначення транспортних затримок на регульованому перехресті, що містить блок сканування лазерного променя інфрачервоного діапазону, перший і другий фотоприймачі, перший, другий і третій одновібратори, перший і другий елементи АБО, перший, другий, третій і четвертий формувачі імпульсів, реверсивний лічильник імпульсів, суматор, перший лічильник імпульсів і блок обчислення, причому перший формувач імпульсів сполучений з входом...
Пристрій для визначення транспортних затримок на регульованому перехресті
Номер патенту: 77621
Опубліковано: 25.02.2013
Автори: Денисенко Олег Васильович, Левтеров Андрій Іванович, Ярута Антон Миколайович
МПК: G08G 1/09
Мітки: транспортних, пристрій, визначення, регульованому, перехресті, затримок
Формула / Реферат:
Пристрій для визначення транспортних затримок на регульованому перехресті, що містить одновібратор, елемент затримки, реверсивний лічильник імпульсів, суматор, лічильник імпульсів і блок обчислення (ділення), при цьому елемент затримки підключений до першого інформаційного входу реверсивного лічильника імпульсів, вихід якого сполучений з першим входом суматора, а вихід останнього сполучений з першим інформаційним входом блока обчислення, а...
Попередній патент: Повний спосіб виробництва свинцево-кислотних акумуляторних батарей (варіанти)
Наступний патент: Пальниковий пристрій для спалювання природного та генераторного газів
Випадковий патент: Спосіб формування неокисті при її руйнуванні