Автоматичний пристрій для відводу рідини
Номер патенту: 107225
Опубліковано: 10.12.2014
Автори: Ульченко Володимир Максимович, Шуліков Олександр Сергійович, Колеснік Юрій Васильович, Гончаров Олексій Григорович, Івакін Олександр Петрович







Формула / Реферат
1. Автоматичний пристрій для відводу рідини, що містить заглибний бункер у резервуарі з водою, жирову трубу, вхід якої з'єднаний з виходом з бункера, який відрізняється тим, що бункер закріплений до рухливої рами, що має можливість переміщення щодо нерухомої рами за допомогою закріпленого на ній електропривода з гвинтовим механізмом переміщення рухливої рами бункера, оснащений щонайменше одним датчиком, блоком автоматичного керування електроприводом із гвинтовим механізмом переміщення рухливої рами бункера з регулюванням глибини і часу перебування бункера під водою.
2. Автоматичний пристрій для відводу рідини за п. 1, який відрізняється тим, що блок автоматичного керування електроприводом із гвинтовим механізмом переміщення рухливої рами бункера містить блок порівняння даних, таймер, блок виконання алгоритму робочого ходу, де один із входів блока порівняння даних з'єднаний з виходом таймера, інший з входів блока порівняння даних з'єднаний з виходом щонайменше одного датчика, вихід блока порівняння даних з'єднаний з входом блока виконання алгоритму робочого ходу, вихід якого з'єднаний із входом електропривода з гвинтовим механізмом переміщення рухливої рами бункера.
Текст
Реферат: Автоматичний пристрій для відводу рідини належить до водоочисних споруджень У пристрої бункер закріплений до рухливої рами, що має можливість переміщення щодо нерухомої рами за допомогою закріпленого на ній електропривода з гвинтовим механізмом переміщення рухливої рами бункера. Пристрій оснащений щонайменше одним датчиком, блоком автоматичного керування електроприводом із гвинтовим механізмом переміщення рухливої рами бункера, з регулюванням глибини і часу перебування бункера під водою. Блок автоматичного керування електроприводом із гвинтовим механізмом переміщення рухливої рами бункера містить блок порівняння даних, таймер, блок виконання алгоритму робочого ходу, де один із входів блока порівняння даних з'єднаний з виходом таймера, інший з входів блока порівняння даних з'єднаний з виходом щонайменше одного датчика, вихід блока порівняння даних з'єднаний із входом блока виконання алгоритму робочого ходу, вихід якого з'єднаний з входом електропривода з гвинтовим механізмом переміщення рухливої рами бункера. Пристрій дозволяє автоматизувати процес збору і відводу спливаючих і речовин, що плавають, забезпечити можливість регулювання в широких межах кількість води, що відводиться, і кількість речовин, що плавають, які відводяться через бункер. UA 107225 C2 (12) UA 107225 C2 UA 107225 C2 5 10 15 20 25 30 35 40 45 50 55 60 Пристрій належить до водоочисних споруджень, зокрема біологічного очищення стічних вод, і може бути використаний для збору і відводу спливаючих речовин з водної поверхні в первинних відстійниках, наприклад, для відводу жиру; у SBR-реакторах (англ. SBR-Sequence Batch Reactor, реактор перемінної дії) для рівномірного відводу визначеної витрати оброблюваної води з постійним контролем переміщення бункера; в усереджувачах з перемінним рівнем води - для рівномірного відводу води з постійним контролем переміщення бункера; у згущувачах осаду - для відводу освітленої води з контролем мутності води на переливі бункера. Відомий автоматичний пристрій для відводу рідини (див. Авторське посвідчення СРСР 821410, С02F 1/52, 1981), що містить заглибний бункер у резервуарі з водою, жирову трубу, вхід якої з'єднаний з виходом з бункера. У відомому пристрої для видалення речовин, що плавають на водній поверхні радіального відстійника, речовини збираються за допомогою напівзаглибної дошки, що зганяє речовини, що спливли, у бункер, який примусово затоплюється при підході до нього напівзаглибної дошки. Бункер знову піднімається над водною поверхнею відстійника при відході напівзаглибної дошки від бункера. У затопленому стані бункера відбувається видалення шляхом зливу в нього речовин, що плавають, разом з водою в жирову трубу відстійника. Бункер автоматично механічно затоплюється щораз при підході до нього напівзаглибної дошки. При цьому в бункер разом з речовинами, що плавають, іде велика кількість води, навіть тоді, коли спливла незначна кількість речовин на водній поверхні відстійника, що збільшує навантаження на очисні спорудження. Технічна задача, розв'язувана за допомогою дійсного удосконалення, складається в підвищенні ефективності видалення речовин, що плавають, з водної поверхні або відводу освітленої води, зниження виносу води через бункер разом з вилученими речовинами, що плавають, можливість роботи в ручному або автоматичному режимах роботи пристрою по заданому техпроцесу. Зазначений технічний результат досягається тим, що автоматичний пристрій для відводу рідини, що містить заглибний бункер, трубу, вхід якої з'єднаний з виходом з бункера, який відрізняється тим, що бункер закріплений до рухливої рами, що має можливість переміщення щодо нерухомої рами за допомогою закріпленого на ній електропривода з гвинтовим механізмом переміщення рухливої рами бункера, оснащений щонайменше одним датчиком, блоком автоматичного керування електроприводом із гвинтовим механізмом переміщення рухливої рами бункера з регулюванням глибини і часу перебування бункера під водою. У автоматичному пристрої для відводу рідини блок автоматичного керування електроприводом із гвинтовим механізмом переміщення рухливої рами бункера містить блок порівняння даних, таймер, блок виконання алгоритму робочого ходу, де один із входів блока порівняння даних з'єднаний з виходом таймера, інший з входів блока порівняння даних з'єднаний з виходом щонайменше одного датчика, вихід блока порівняння даних з'єднаний із входом блока виконання алгоритму робочого ходу, вихід якого з'єднаний із входом електропривода з гвинтовим механізмом переміщення рухливої рами бункера. Технічний результат: удосконалення дозволяє цілком автоматизувати процес видалення речовин, що плавають, через бункер, забезпечити можливість контролю і регулювання глибини і часу перебування бункера під водою, відслідковувати положення бункера щодо рівня води, забезпечити можливість контролю і регулювання в широких межах кількості води, що відводиться, через бункер. Конкретний приклад виконання пристрою проілюстрований на фігурах і схемах. Фіг. 1. Автоматичний пристрій для відводу рідини. Блок-схема блока керування електроприводом переміщення бункера. Фіг. 2. Автоматичний пристрій для відводу рідини. Фрагмент пристрою. Фіг. 3. Автоматичний пристрій для відводу рідини. Фрагмент пристрою. Перелік позначень на малюнках і схемах. 1. Резервуар. 2. Бункер. 3. Жирова труба. 4. Рухлива рама. 5. Нерухома рама. 6. Електропривод із гвинтовим механізмом. 7. Датчик. 8. Блок автоматичного керування електроприводом б. 9. Рівень води. 1 UA 107225 C2 5 10 15 20 25 30 35 40 45 50 55 10. Ходовий гвинт. 11. Металевий рухливий елемент. Автоматичний пристрій для відводу рідини, далі по тексту пристрій, показано на прикладі його використання для збору і відводу спливаючих речовин з водної поверхні або відводу проясненої води з резервуара. Пристрій містить в резервуарі 1 з водою заглибний бункер 2, жирову трубу 3, вхід якої з'єднаний з виходом з бункера. Бункер 2 закріплений до рухливої рами 4, що має можливість переміщення щодо нерухомої рами 5 за допомогою закріпленого на ній електропривода 6 із гвинтовим механізмом переміщення рухливої рами 4 бункера 2, оснащений щонайменше одним датчиком 7, блоком 8 автоматичного керування електроприводом б із гвинтовим механізмом переміщення рухливої рами 4 бункера 2, з регулюванням глибини і часу перебування бункера 2 під рівнем 9 води, з можливістю відстеження положення бункера щодо рівня води і можливістю контролю мутності води, що відводиться. Блок 8 автоматичного керування електроприводом із гвинтовим механізмом переміщення рухливої рами 4 бункера 2 містить блок порівняння даних, таймер, блок виконання алгоритму робочого ходу, де один із входів блока порівняння даних з'єднаний з виходом таймера, інший з входів блока порівняння даних з'єднаний з виходом щонайменше одного датчика 7, вихід блока порівняння даних з'єднаний із входом блока виконання алгоритму робочого ходу, вихід якого з'єднаний із входом електропривода 6 із гвинтовим механізмом переміщення рухливої рами 4 бункера 2. Гвинтовий механізм електропривода 6 містить ходовий гвинт 10, закріплений його верхнім кінцем до вала електропривода 6, а іншим його нижнім кінцем до рухливої рами 4 із установленим на рухливій рамі 4 бункером 2. Хід гвинта складає 12 мм на один його оборот. Нерухома рама 5 оснащена площадкою техобслуговування електропривода 6 і керування техпроцесом занурення під рівень 9 води і вихід над рівнем 9 води бункера 2 в автоматичному або ручному режимах. Для переміщення бункера 2 використаний електропривод 6 із гвинтовим механізмом, наприклад, 250 Ут, 380 В. AUMA SA10.2/F10, положення відкрити/закрити, у комплекті з муфтою тип "A" DIN 3210. Як один з датчиків 7 використаний індукційний датчик, що видає тактовий імпульс щораз, коли повз нього проходить металевий елемент 11, наприклад, ферма мулошкряба в первинному відстійнику, або металевий елемент 11 поплавця в резервуарі 1 з водою для відстеження або підтримки рівня 9 води в резервуарі 1 (у випадку застосування пристрою в SBR-реакторах перемінної дії, в усереджувачах, згущувачах). Середня частина жирової труби 3 виконана з гофрованої труби, із пружного еластичного матеріалу, наприклад, гуми або з полімерного матеріалу типу удароміцного ПВХ і має можливість згинатися при переміщенні бункера 2 вище або нижче рівня 9 води в резервуарі 1. Верхній кінець жирової труби 3 з нержавіючої сталі жорстко і герметично закріплений до бункера 2, нижній кінець жирової труби проходить крізь стінку резервуара 1. У тракті жирової труби 3 може бути встановлений насос для примусової відкачки води з резервуара 1 через бункер 2. Як датчик 7 може бути вимірник мутності проясненої води, що відводиться, наприклад у випадку застосування пристрою в згущувачі. Пристрій працює в такий спосіб. Передбачено два режими роботи пристрою: ручний або автоматичний, котрі вибираються оператором за допомогою переключення їм 2-позиційної ручки-селектора, що знаходиться на щиті блока 8 керування електроприводом 6 із гвинтовим механізмом переміщення рухливої рами 4 бункера 2. При ручному режимі, занурення бункера 2 на задану глибину визначається тривалістю натискання кнопки "опуск" на щиті блока 8 керування електроприводом 6. Максимальна глибина задається першим кінцевим вимикачем електропривода 6. Тривалість занурення бункера 2 контролюється оператором візуально. У вихідному положенні верхня частина бункера 2 виступає над рівнем 9 води на 25 мм або більше, що можна відрегулювати на щиті блока 8 автоматичного керування електроприводом 6. Підняття верхньої частини бункера 2 над рівнем 9 води в резервуарі 1 при натисканні на кнопку "підйом", що знаходиться на вищезгаданому щиті блока 8 автоматичного керування електроприводом 6, зупинка електропривода 6, коли верхня частина бункера 2 вийшла над рівнем 9 води в резервуарі 1 здійснюється по спрацьовуванню другого кінцевого вимикача електропривода 6. 2 UA 107225 C2 5 10 15 20 25 30 35 40 45 50 55 В автоматичному режимі роботи пристрою металевий рухливий елемент 11 проходить повз нерухомий датчик 7, то з виходу датчика 7, виходить тактовий імпульс щораз, коли повз нього проходить металевий рухливий елемент 11. Тактовий імпульс з виходу нерухомого датчика 7 надходить на один із входів блока порівняння даних блока 8 автоматичного керування, у який повинний надійти також керуючий імпульс від таймера, якщо керуючий сигнал не надходить ні на один із входів блока порівняння даних, то верхня частина бункера 2 залишається виступати над рівнем 9 води в резервуарі 1, при цьому, згону плаваючих речовин у бункер 2 не відбувається, що збільшує їхню концентрацію на водній поверхні резервуара 1 і знижує витрату води на видалення з нього речовин, що плавають. За допомогою таймера в блоці автоматичного керування електроприводом виконується установка частоти спрацьовування відводу через бункер 2 речовин, що плавають. При надходженні сигналу з блока 8 автоматичного керування електроприводом на занурення бункера 2, то через бункер 2 відбувається інтенсивний відвід речовин, що плавають, промивання жирової труби 3 і бункера 2 у результаті занурення бункера 2 нижче рівня 9 води в резервуарі 1 на задану глибину його занурення. Максимальна глибина занурення або переміщення над рівнем 9 води бункера 2 обмежуються кінцевими вимикачами електропривода 6 переміщення бункера 2, що закріплені на нерухомій рамі 5, де встановлений електропривод 6 із гвинтовим механізмом і ходовим гвинтом 10. Тривалість занурення бункера 2 установлюється по таймеру блока 8 автоматичного керування і є регульованою величиною. Мінімальний обсяг води, що скидається за цикл занурення бункера 2 складає 1,3-1,5 кубометри. Якщо керуючий сигнал у блоці 8 автоматичного керування від таймера надходить на один із входів блока порівняння даних, то з виходу блока порівняння даних надходить керуючий імпульс на вхід блока виконання алгоритму робочого ходу, від якого надходять відповідні керуючі імпульси на вхід електропривода 6, що за допомогою гвинта 10 гвинтового механізму занурює бункер 2 під рівень 9 води в резервуарі 1 або на задану глибину його занурення, витримує бункер 2 у зануреному положенні, переміщає бункер 2 у вихідне положення над рівнем 9 водної поверхні резервуара 1. У затопленому положенні бункера 2 верхній шар води з-під рівня 9 води в резервуарі 1 самопливом зливається в бункер 2 разом з речовинами, що плавають, що приділяються з бункера 2 через жирову трубу 3 і надходять, наприклад, знову на вхід очисних споруджень або куди подалі. Блок 8 автоматичного керування електроприводом має такі основні функції: забезпечення можливості ручного й автоматичного режимів видалення речовин, що плавають, з водної поверхні; автоматичне видалення речовин, що плавають, протягом доби; діагностику устаткування по заданих алгоритмах; регулювання параметрів техпроцесу періодичності спрацьовування пристрою і тривалості перебування бункера в затопленому положенні; захист електроустаткування від перевантажень; індикацію поточних і заданих параметрів роботи пристрою; аварійну сигналізацію; оснащений кнопками ручного керування на щиті начіпної шафи з блоком керування електроприводом. Висота крайки бункера 2 над рівнем 9 води в резервуарі 1, у межі 20±10 мм. Наприклад, у конкретному прикладі 25 мм. Хід занурення бункера 2 до 180 мм. Наприклад, у конкретному прикладі 65 мм. Час циклу занурення бункера складає до 20 с Наприклад, у конкретному прикладі 10 с. Тривалість перебування бункера на максимальній глибині до 1000 с. Наприклад, у конкретному прикладі 24 с. Витрата води відводу речовин, що плавають, через бункер 2 складає до 200 л/с. Наприклад, у конкретному прикладі 48 л/с. Витрата води за одне занурення бункера 2 не більш 6 кубометрів. Настановна величина від 1,3 до 1,5 кубометрів. При глибокому зануренні бункера від рівня 9 води, коли бункер 2 цілком наповнений водою для забезпечення максимальної рівномірної витрати води через бункер 2 або при відсутності речовин, що плавають, то через бункер 2 проходить тільки вода, що має місце в SBRреакторах, усереджувачах, згущувачах. Використання пристрою дозволяє: 3 UA 107225 C2 5 10 - у первинних відстійниках цілком автоматизувати процес збору і відводу спливаючих і речовин, що плавають, забезпечити можливість регулювання в широких межах кількості води, що відводиться, і кількості речовин, що плавають, минаючих через бункер; - у SBR-реакторах забезпечити рівномірний відвід визначеної витрати оброблюваної води з постійним відстеженням положення бункера щодо рівня води; - в усереджувачах з перемінним рівнем забезпечити рівномірний відвід води з постійним відстеженням положення бункера щодо рівня води; - у згущувачах осаду забезпечити відвід проясненої води з постійним відстеженням положення бункера щодо рівня води з контролем мутності вод, наприклад, на переливі зануреного бункера. ФОРМУЛА ВИНАХОДУ 15 20 25 1. Автоматичний пристрій для відводу рідини, що містить заглибний бункер у резервуарі з водою, жирову трубу, вхід якої з'єднаний з виходом з бункера, який відрізняється тим, що бункер закріплений до рухливої рами, що має можливість переміщення щодо нерухомої рами за допомогою закріпленого на ній електропривода з гвинтовим механізмом переміщення рухливої рами бункера, оснащений щонайменше одним датчиком, блоком автоматичного керування електроприводом із гвинтовим механізмом переміщення рухливої рами бункера з регулюванням глибини і часу перебування бункера під водою. 2. Автоматичний пристрій для відводу рідини за п. 1, який відрізняється тим, що блок автоматичного керування електроприводом із гвинтовим механізмом переміщення рухливої рами бункера містить блок порівняння даних, таймер, блок виконання алгоритму робочого ходу, де один із входів блока порівняння даних з'єднаний з виходом таймера, інший з входів блока порівняння даних з'єднаний з виходом щонайменше одного датчика, вихід блока порівняння даних з'єднаний з входом блока виконання алгоритму робочого ходу, вихід якого з'єднаний із входом електропривода з гвинтовим механізмом переміщення рухливої рами бункера. 4 UA 107225 C2 Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Автори англійськоюUlchenko Volodymyr Maksymovych, Shulikov Oleksandr Serhiiovych, Ivakin Oleksandr Petrovych, Kolesnik Yurii Vasyliovych
Автори російськоюУльченко Владимир Максимович, Шуликов Александр Сергеевич, Ивакин Александр Петрович, Колесник Юрий Васильевич
МПК / Мітки
МПК: B01D 21/00
Мітки: відводу, рідини, пристрій, автоматичний
Код посилання
<a href="https://ua.patents.su/7-107225-avtomatichnijj-pristrijj-dlya-vidvodu-ridini.html" target="_blank" rel="follow" title="База патентів України">Автоматичний пристрій для відводу рідини</a>
Автоматичний і ручний пристрій для контролю витікання води або будь-якої іншої рідини
Номер патенту: 78504
Опубліковано: 10.04.2007
Автор: Соса Рафаель
МПК: F16K 21/00
Мітки: автоматичний, пристрій, рідини, води, іншої, витікання, будь-якої, ручний, контролю
Формула / Реферат:
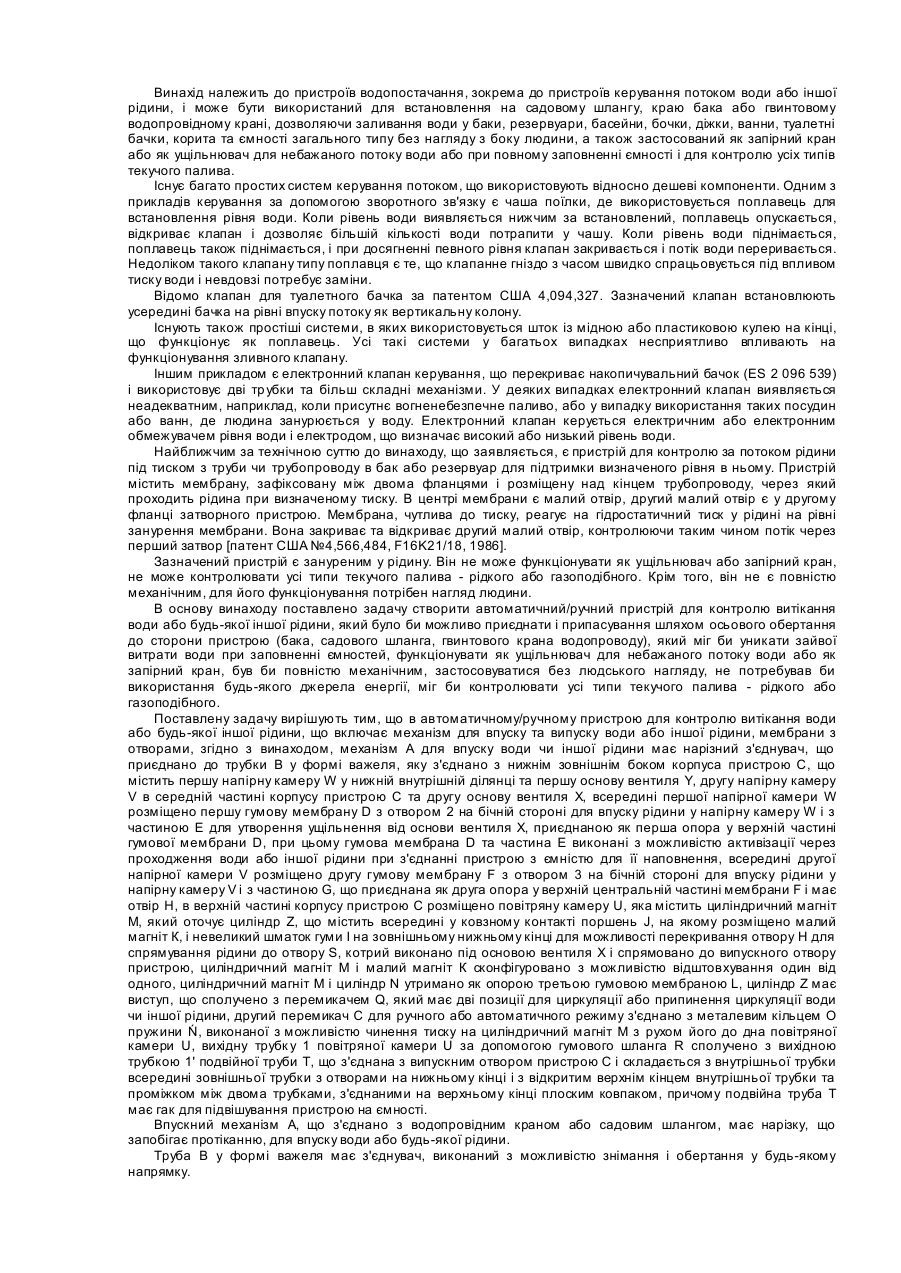
1. Автоматичний і ручний пристрій для контролю витікання води або будь-якої іншої рідини, що включає механізм для впуску та випуску води або іншої рідини, мембрани з отворами, який відрізняється тим, що механізм А для впуску води чи іншої рідини має нарізний з'єднувач, що приєднаний до трубки В у формі коліна, яку з'єднано з нижнім зовнішнім боком корпуса пристрою С, що містить першу напірну камеру W у нижній внутрішній ділянці та першу...
Автоматичний пристрій керування освітлювальними установками

Номер патенту: 58133
Опубліковано: 11.04.2011
Автор: Мельник Мирослав Михайлович
МПК: H05B 37/00
Мітки: установками, освітлювальними, пристрій, керування, автоматичний
Формула / Реферат:
Автоматичний пристрій керування освітлювальними установками, що складається з керованого давача часу (2), вихід якого з'єднаний із першим входом блока керування (3), вихід якого з'єднаний із входом виконавчого блока (4), який відрізняється тим, що до другого входу блока керування (3) під'єднано вихід давача освітленості (1).
Автоматичний ваговий дозатор рідини
Номер патенту: 37684
Опубліковано: 15.05.2001
Автори: Овчаренко Олександр Іванович, Овчаренко Тимофій Олександрович, Діденко Костянтин Іванович
МПК: G01G 17/00
Мітки: автоматичний, ваговий, дозатор, рідини
Формула / Реферат:
(21) 2000041905(54) (57)Дата прийняттярішення23.01.2001 р.1. Автоматичний ваговий дозатор рідини, який містить витратну ємність із зливним патрубком, в якому установлений запірний пристрій, проміжну ємність із зливним патрубком, що розташована нижче від витратної ємності, датчик ваги і пристрій керування із задатчиком ваги дози, який відрізняється тим, що в нього введені ваговимірювальна платформа, дисковий...
Автоматичний регулятор рівня рідини
Номер патенту: 68783
Опубліковано: 16.08.2004
Автори: Коміссаров Сергій Сергійович, Ахтямов Альберт Мінахметович
МПК: F16K 21/00, G01F 23/30
Мітки: автоматичний, рідини, регулятор, рівня
Формула / Реферат:
Автоматичний регулятор рівня рідини, що містить зв'язаний з резервуаром датчик рівня рідини у вигляді поплавкової камери з поплавком, прикріпленим до привідного важеля, клапан для регулювання подачі рідини в резервуар, механізм приводу клапана, який відрізняється тим, що датчик рівня рідини виконано у вигляді циліндра з підпружиненим до нього поршнем, при цьому порожнина циліндра з боку непідпружиненого торця поршня герметично з'єднана за...
Пристрій для збору й відводу біогазу та фільтрату на полігонах твердих побутових відходів
Номер патенту: 85338
Опубліковано: 12.01.2009
Автори: Ноженко Олексій Олексійович, Давиденко Володимир Андрійович, Коробов Арсеній Юрійович, Вишневський Дмитро Олександрович
Мітки: фільтрату, твердих, побутових, збору, відходів, відводу, біогазу, пристрій, полігонах
Формула / Реферат:
1. Пристрій збору й відводу біогазу та фільтрату на полігонах твердих побутових і промислових відходів, що складається з полімерного кільця із глухими стінками й днищем з полімерного листового матеріалу, на якому обладнаний колодязь основного вертикального дренажу, з можливістю нарощування полімерними кільцями з перфорованими гофрованими стінками, до основного вертикального дренажу закріплена система додаткового дренажу із заглушками на...
Попередній патент: Спосіб отримання інгібіторів корозії чорних металів
Наступний патент: Спосіб одержання 5-гідроксиметилфурфуролу з глюкози
Випадковий патент: Спосіб визначення швидкості загоєння ран