Інтелектуальна система геоінформаційної системи підтримки керування територіальними об’єктами
Номер патенту: 109367
Опубліковано: 10.08.2015
Автори: Крельштейн Петро Давидович, Бурачек Всеволод Германович, Кривоберець Сергій Володимирович, Донець Володимир Володимирович, Зацерковний Віталій Іванович
Формула / Реферат
Інтелектуальна система геоінформаційної системи (ГІС) підтримки керування територіальними об'єктами, що містить: ситуаційний центр системи керування (16), об'єкт керування (2), блок порівняння (4), блок еталонів (5), блок обробки інформації (7), блок математичних моделей (8), блок резервних програм (11), блок корекції програм обліку відхилень характеристик об'єкта від заданих параметрів (13), блок контролю стану і динаміки територіальних об'єктів (3), яка відрізняється тим, що додатково містить блок геоінформаційної підтримки прийняття рішень (1), який суміщений з ситуаційним центром системи керування (16) і який сформований як канал зворотного зв'язку, а також в цьому блоці сформовані три канали відеоінформації на топографічній картині зображення поточної ситуації для прийняття рішення про сигнал керування: канал рекомендованого сигналу керування, канал типових ретроспективних аналогів ситуації і канал поточної ситуації та прогнозування, що включає в себе електронні блоки: блок оцінки поточної ситуації та прогнозування, що містить асоціативну нейронну машину (12), блок оцінки якості та фільтрації даних (6), блок оцінки якості ГІС (9), блок оцінки ритму керування (10), при цьому перший вихід блока геоінформаційної підтримки прийняття рішень (1) електрично зв'язаний з другим входом блока математичних моделей (8), другий вихід блока геоінформаційної підтримки прийняття рішень (1) електрично зв'язаний з першим входом блока формування типових ретроспективних аналогів ситуації (15), третій вихід блока геоінформаційної підтримки прийняття рішень (1) електрично зв'язаний з другим входом блока оцінки ритму керування (10), а перший вхід блока геоінформаційної підтримки прийняття рішень (1) електрично зв'язаний з першим виходом блока обробки інформації (7), другий вхід блока геоінформаційної підтримки прийняття рішень (1) електрично зв'язаний з виходом блока вибору рекомендованого сигналу керування, третій вхід блока геоінформаційної підтримки прийняття рішень (1) електрично зв'язаний з виходом блока формування типових ретроспективних аналогів ситуації (15), четвертий вхід блока геоінформаційної підтримки прийняття рішень (1) електрично зв'язаний з третім виходом блока оцінки поточної ситуації та прогнозування (12), вихід об'єкта керування по радіоканалу зв'язаний з входом блока контрою стану і динаміки об'єкта (3), а вхід об'єкта керування по радіоканалу зв'язаний з виходом ситуаційного центра системи керування (16), вихід блока контрою стану і динаміки об'єкта електрично зв'язаний з другим входом блока порівняння (4), перший вихід блока порівняння (4) електрично зв'язаний з першим входом блока еталонів (5), другий вихід блока порівняння (4) електрично зв'язаний з входом блока оцінки якості та фільтрації даних (6), а перший вхід блока порівняння (4) електрично зв'язаний з першим виходом блока еталонів (5), другий вихід блока еталонів (5) електрично зв'язаний з першим входом блока математичних моделей (8), а другий вхід блока еталонів (5) електрично зв'язаний з першим виходом блока математичних моделей (8), перший вихід блока оцінки якості та фільтрації даних (6) електрично зв'язаний з другим входом блока оцінки якості ГІС (9), другий вихід блока оцінки якості та фільтрації даних (6) електрично зв'язаний з другим входом блока обробки інформації (7), другий вихід блока обробки інформації (7) електрично зв'язаний з першим входом блока оцінки якості ГІС (9), третій вихід блока обробки інформації (7) електрично зв'язаний з першим входом блок оцінки ритму керування (10), четвертий вихід блока обробки інформації (7) електрично зв'язаний з другим входом блока оцінки поточної ситуації та прогнозування (12), а перший вхід блока обробки інформації (7) електрично зв'язаний з другим виходом блока математичних моделей (8), третій вхід блока обробки інформації (7) електрично зв'язаний з виходом блока оцінки якості ГІС (9), третій вихід блока математичних моделей (8) електрично зв'язаний з першим входом блока резервних програм (11), перший вихід блок оцінки ритму керування (10) електрично зв'язаний з третім входом блока оцінки поточної ситуації та прогнозування (12), другий вихід блока оцінки ритму керування (10) електрично зв'язаний з другим входом блока корекції програм обліку відхилень характеристик об'єкта від заданих параметрів (13), вихід блока резервних програм (11) електрично зв'язаний з першим входом блока корекції програм обліку відхилень характеристик об'єкта від заданих параметрів (13), а другий вхід блока резервних програм (11) електрично зв'язаний з другим виходом блока корекції програм обліку відхилень характеристик об'єкта від заданих параметрів (13), перший вихід блока оцінки поточної ситуації та прогнозування (12) електрично зв'язаний з другим входом блока формування типових ретроспективних аналогів ситуації (15), другий вихід блока оцінки поточної ситуації та прогнозування (12) електрично зв'язаний з третім входом блока корекції програм обліку відхилень характеристик об'єкта від заданих параметрів (13), перший вихід блока корекції програм обліку відхилень характеристик об'єкта від заданих параметрів (13) електрично зв'язаний з входом блока вибору рекомендованого сигналу керування (14).
Текст
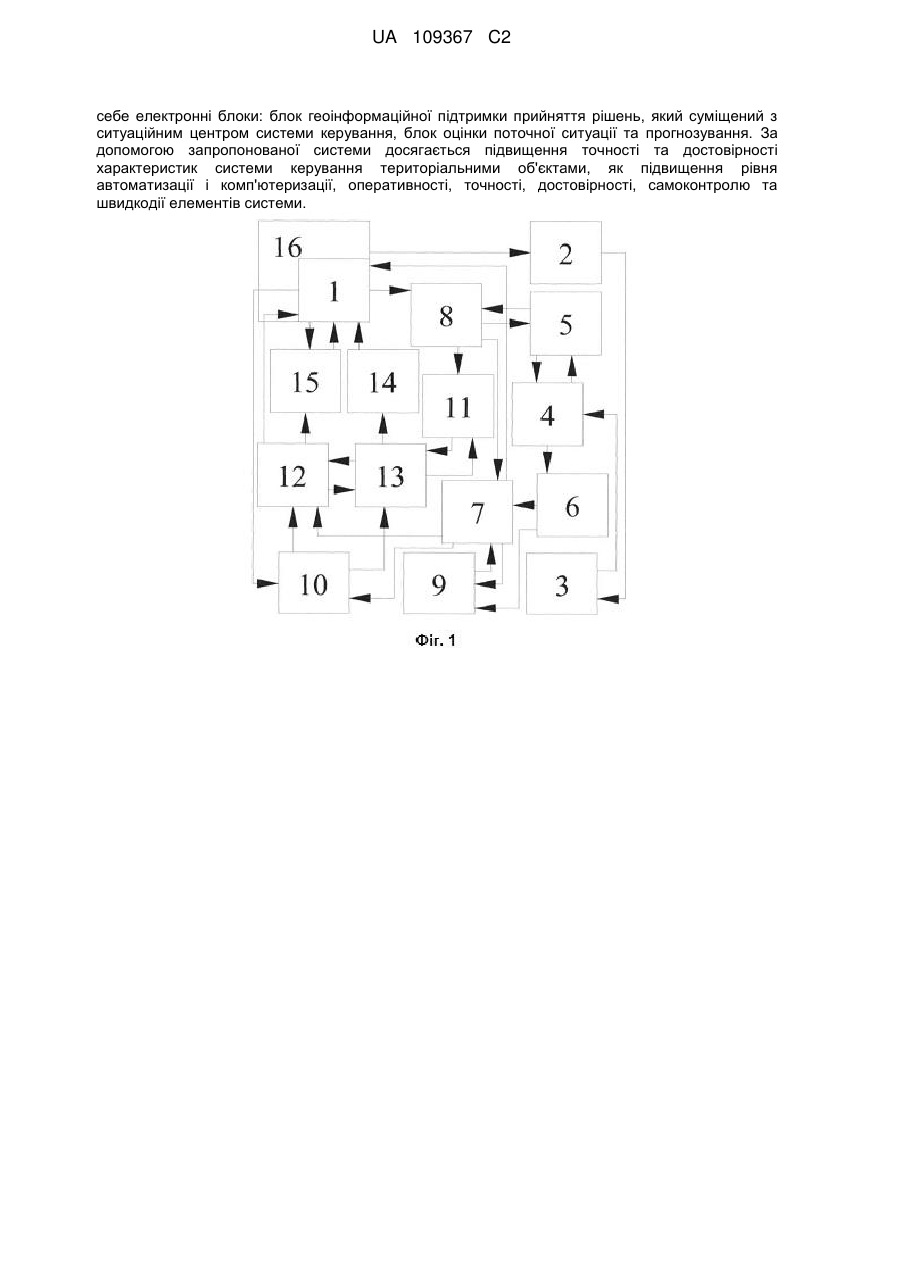
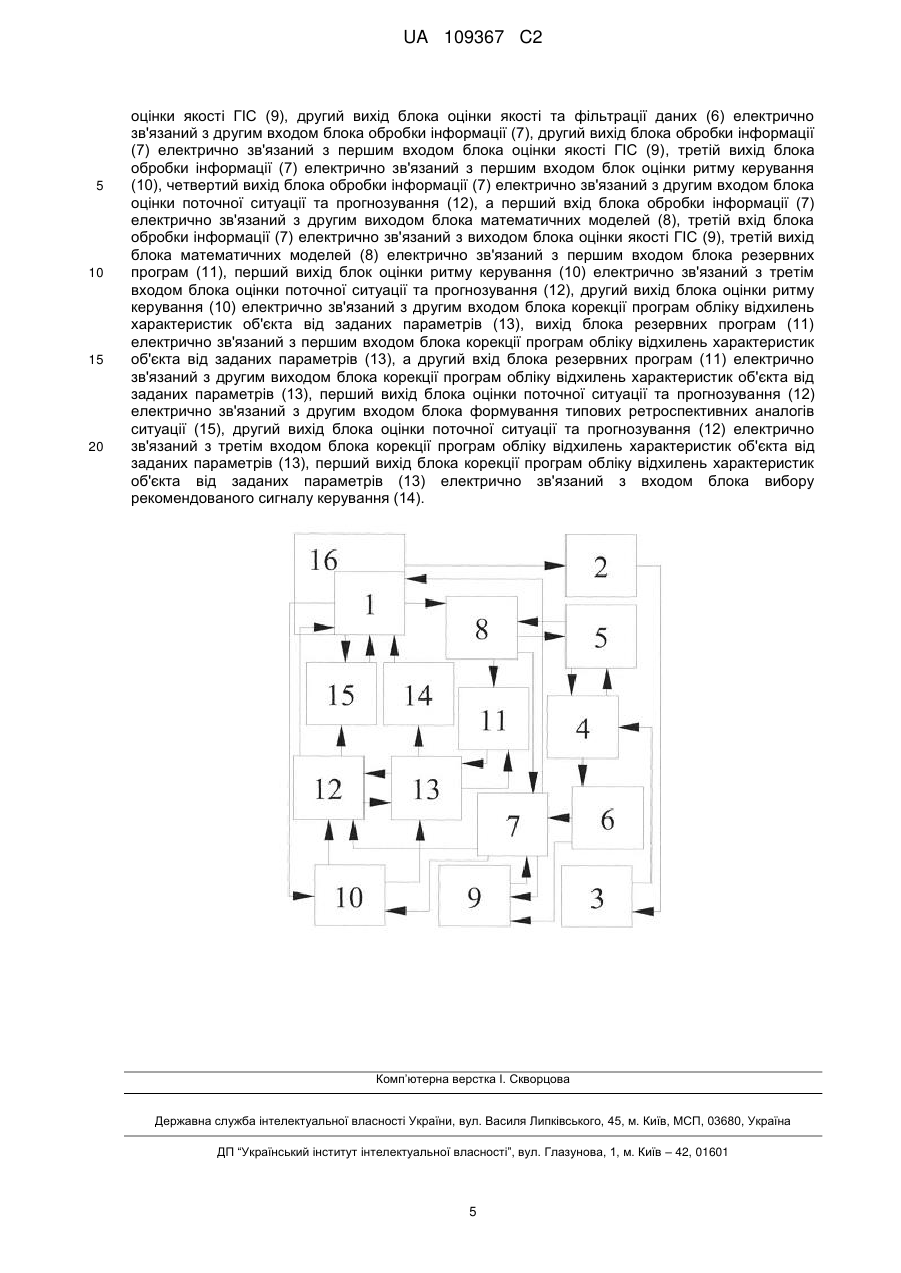
Реферат: Інтелектуальна система геоінформаційної системи підтримки керування територіальними об'єктами належить до області геоінформаційних систем (ГІС), містить ситуаційний центр системи керування, об'єкт керування, блок порівняння, блок еталонів, блок обробки інформації, блок математичних моделей, блок резервних програм, блок корекції програм обліку відхилень характеристик об'єкта від заданих параметрів, блок контролю стану і динаміки територіальних об'єктів, який сформований як канал зворотного зв'язку, а також в ньому сформовано три канали відеоінформації на топографічній картині зображення поточної ситуації для прийняття рішення про сигнал керування: канал рекомендованого сигналу керування, канал типових ретроспективних аналогів ситуації і канал поточної ситуації та прогнозування, що включає в UA 109367 C2 (12) UA 109367 C2 себе електронні блоки: блок геоінформаційної підтримки прийняття рішень, який суміщений з ситуаційним центром системи керування, блок оцінки поточної ситуації та прогнозування. За допомогою запропонованої системи досягається підвищення точності та достовірності характеристик системи керування територіальними об'єктами, як підвищення рівня автоматизації і комп'ютеризації, оперативності, точності, достовірності, самоконтролю та швидкодії елементів системи. UA 109367 C2 5 10 15 20 25 30 35 40 45 50 55 60 Інтелектуальна система геоінформаційної підтримки керування територіальними об'єктами (ІСГПУТО) належить до області геоінформаційних систем (ГІС), зокрема ГІС просторової інтерпретації поведінки об'єктів на місцевості з використанням розвиненої картографічної бази. Відомі інтелектуальні системи (ІС), наприклад, такого типу як описана в [1]: система для формування знань засобами штучного інтелекту в умовах невизначеності та неповноти вхідної інформації, що містить чарунку штучного інтелекту (рецептора-блока зчитування з аналоговоцифровим перетворювачем, пристрою керування вибором генетичних знань), і блока постійної пам'яті, що містить блоки бази знань і бази даних, з блоком системи керування блоком бази даних, порівнювача - третього суматора, зв'язаного із блоком набору зразкових генетичних знань, ефектора - блока керування, цифро-аналогово перетворювача (декодера), виконавчого блока, блока систем підтримки прийняття рішень, блока набору зразкових знань, яка відрізняється тим, що до неї введено блоки ранжування та вагових коефіцієнтів, перший з них розміщений між блоком зчитування і першим аналого-цифровим перетворювачем, другий блок ранжування та вагових коефіцієнтів розміщено між блоками набору зразкових знань і другим суматором, третій блок ранжування та вагових коефіцієнтів розташовано між блоками зразків рішень і третім суматором, четвертий блок ранжування та вагових коефіцієнтів розташовано між блоками зразків рішень і третім суматором, четвертий блок ранжування та вагових коефіцієнтів розміщений між виконавчим блоком і другим аналогово-цифровим перетворювачем. До недоліків ІС даного типу варто віднести відсутність зворотного зв'язку та функції підтримки керування робочим процесом. В [2] розглянуто проблема тренажерного навчання. Поставлене завдання вирішується за рахунок створення інтелектуальної системи тренажерного навчання геодезичним вимірам, яка містить імітатор візуальної візирної картини, обчислювальні засоби, що містять блок введення даних, блоки перетворення інформації і програм, блоки аналізу інформації, блок навчальних коментарів та інформаційний дисплей, яка відрізняється тим, що містить блок вибору виду та класу вимірів, блок випадкового вибору варіанта програми вимірів, блок еталонних візирних картин, блок еталонних результатів вимірів, блок випадкового вибору помилкових візирних картин, блок помилкових візирних картин. Недоліком такої ІС також є відсутність підтримки керування процесом. В [3] представлена відома морська транспортна система на основі інтелектуальних геоінформаційних систем, що містить асоціативну інтелектуальну машину (AIM). Особливість AIM в складі ГІС в тому, що між її входами і виходами встановлені однозначні відповідності. Як нейронна мережа машини виступає рекурентна мережа із зворотними зв'язками. У мережі здійснюються керовані зміщення сукупностей одиничних образів залежно від їх станів і забезпечується пріоритетність коротких зв'язків між нейронами. До недоліків даної системи можемо віднести відсутність можливості відеоінформаційного діалогу між менеджером системи керування і рекомендованими рішеннями ГІС і нейронної машини, що виключає функцію оперативного керування і точність результатів. Відома інтелектуальна геоінформаційна система, для застосування в завданнях діагностування територіально-виробничих систем (ТВС) [4], яка відрізняється архітектурою програмного комплексу, реалізацією інтеграції в ГІС технології розрахунків нейронних мереж для діагностики і кластеризації ТВС і апаратом побудови нейронної мережі. У рамках даної розробки обґрунтовано необхідність використання інтелектуальних ГІС для вирішення завдань моделювання та прогнозування станів територіально-виробничих систем України (зокрема, діагностики та класифікації даних систем за рівнем безпеки та сталого розвитку), так як в традиційних технологіях ГІС основним типом аналізу даних є статистичний аналіз. В [5] відзначено, що як правило, в сучасній практиці для вирішення подібних завдань використовується ряд статистичних методів, проте у зв'язку з тим, що частина інформації про діяльність ТВС часто представлена не в повному обсязі, і не завжди є достовірною, то звичайні методи не дозволяють вирішувати дані завдання, або дають неадекватні результати. Відповідно до [4] з розвитком комп'ютерної техніки останнім часом для вирішення класу подібних завдань стали широко використовуватися такі методичні підходи: метод дискримінантного аналізу; методологію штучних нейронних мереж. До недоліків даної ІС можемо віднести відсутність функції підготовки рішень підтримки керування, а також недостатньо висока точність. Як аналог, прийнятий за прототип, можна прийняти відому морську транспортну систему [3], що має подібні ознаки із запропонованою: побудована на основі інтелектуальних геоінформаційних систем з використанням асоціативної інтелектуальної машини. 1 UA 109367 C2 5 10 15 20 25 30 35 40 45 50 55 Задачею винаходу є підвищення характеристик системи керування територіальними об'єктами, таких як точність, достовірність та самоконтроль якості керування, а також ефективність каналу зворотного зв'язку в системі керування. Поставлена задача вирішується за рахунок створення інтелектуальної системи геоінформаційної підтримки керування територіальними об'єктами, що містить ситуаційний центр системи керування (СЦСУ), об'єкт керування, блок порівняння, блок еталонів, блок обробки Інформації, блок математичних моделей, блок резервних програм, блок корекції програм обліку відхилень характеристик об'єкта від заданих параметрів, ГІС, підсистему контролю стану і динаміки територіальних об'єктів, яка відрізняється тим, що ГІС сполучено з підсистемою контролю, яка сформована як канал зворотного зв'язку, а також в ній сформовано три канали відеоінформації для прийняття рішення про сигнал керування: канал рекомендованого сигналу керування, канал типових ретроспективних аналогів ситуації і канал поточної ситуації та прогнозування, що включає в себе електронні блоки: блок геоінформаційної підтримки прийняття рішень (БГППР), який суміщений з СЦСУ, блок оцінки поточної ситуації та прогнозування (БОПСП), що містить асоціативну нейронну машину (АНМ), блок оцінки якості та фільтрації даних (БОЯФ), блок оцінки якості ГІС (БОЯГ), блок оцінки ритму керування (БОРУ), при цьому перший вихід блока БГППР електрично зв'язаний з другим входом блока математичних моделей (БММ), другий вихід БГППР електрично зв'язаний з першим входом блока формування типових ретроспективних аналогів ситуації, третій вихід БГППР електрично зв'язаний з другим входом БОРУ, а перший вхід БГППР електрично зв'язаний з першим виходом блока обробки інформації (БОІ), другий вхід БГППР електрично зв'язаний з виходом блока вибору рекомендованого сигналу (рішення) керування, третій вхід БГППР електрично зв'язаний з виходом блока формування типових ретроспективних аналогів ситуації (БФТРА), четвертий вхід БГППР електрично зв'язаний з третім виходом БОПСП, вихід об'єкта керування по радіоканалу зв'язаний з входом блока контрою стану і динаміки об'єкта (БКСД), а вхід об'єкта керування по радіоканалу зв'язаний з виходом СЦСУ, вихід блока контрою стану і динаміки об'єкта електрично зв'язаний з другим входом блока порівняння (БП), перший вихід БП електрично зв'язаний з першим входом блока еталонів (БЕ), другий вихід БП електрично зв'язаний з входом БОЯФ, а перший вхід БП електрично зв'язаний з першим виходом БЕ, другий вихід БЕ електрично зв'язаний з першим входом блока математичних моделей (БММ), а другий вхід БЕ електрично зв'язаний з першим виходом БММ, перший вихід БОЯФ електрично зв'язаний з другим входом БОЯГ, другий вихід БОЯФ електрично зв'язаний з другим входом блока обробки інформації (БОІ), другий вихід БОІ електрично зв'язаний з першим входом БОЯГ, третій вихід БОІ електрично зв'язаний з першим входом БОРУ, четвертий вихід БОІ електрично зв'язаний з другим входом БОПСП, а перший вхід БОІ електрично зв'язаний з другим виходом БММ, третій вхід БОІ електрично зв'язаний з виходом БОЯГ, третій вихід БММ електрично зв'язаний з першим входом блока резервних програм (БРП), перший вихід БОРУ електрично зв'язаний з третім входом БОПСП, другий вихід БОРУ електрично зв'язаний з другим входом блока корекції програм обліку відхилень характеристик об'єкта від заданих параметрів (БКП), вихід БРП електрично зв'язаний з першим входом БКП, а другий вхід БРП електрично зв'язаний з другим виходом БКП, перший вихід БОПСП електрично зв'язаний з другим входом БФТРА, другий вихід БОПСП електрично зв'язаний з третім входом БКП, перший вихід БКП електрично зв'язаний з входом блока вибору рекомендованого сигналу (рішення) керування (БВРС). Технічним результатом є підвищення характеристик системи керування територіальними об'єктами, як підвищення рівня автоматизації і комп'ютеризації, оперативності, точності, достовірності, самоконтролю та швидкодії елементів системи. На кресленні представлена блок-схема запропонованої інтелектуальної системи геоінформаційної підтримки керування територіальними об'єктами: 1 - блок геоінформаційної підтримки прийняття рішень; 2 - об'єкт керування; 3 - блок контрою стану і динаміки об'єкта; 4 - блок порівняння; 5 - блок еталонів; 6 - блок оцінки якості та фільтрації даних; 7 - блок обробки інформації; 8 - блок математичних моделей; 9 - блок оцінки якості ГІС; 10 - блок оцінки ритму керування; 11 - блок резервних програм; 2 UA 109367 C2 5 10 15 20 25 30 35 40 45 50 55 60 12 - блок оцінки поточної ситуації та прогнозування, що містить асоціативну нейронну машину (АНМ); 13 - блок корекції програм обліку відхилень характеристик об'єкта від заданих параметрів; 14 - блок вибору рекомендованого сигналу (рішення) керування; 15 - блок формування типових ретроспективних аналогів ситуації; 16 - ситуаційний центр системи керування (СЦСУ). Робота інтелектуальної системи геоінформаційної підтримки керування територіальними об'єктами виконується в наступному порядку: Блок 1 є складовою частиною блока 16 - ситуаційного центру системи керування (СЦСУ), при цьому здійснюється збір і представлення (відображення) візуалізованого на топографічній картині зображення поточної ситуації в триканальній інформаційній інтерпретації: у вигляді рекомендованого синтезованого сигналу керування (рішення) і його можливого впливу; у вигляді типових ретроспективних аналогів ситуації і результатів її розвитку; у вигляді аналізу поточної ситуації та прогнозу нейронної машини. Блок 16 відправляє на об'єкт 2, сигнали керування. Блок 3 здійснює спостереження за об'єктом 2 за сигналами, що отримуються від об'єкта (від датчиків на об'єкті і/або дистанційних приладів, що знаходяться поза об'єктом). У блоці 3 формуються дані про об'єкт, попередньо ранжуються (джерело інформації, дата, ступінь надійності тощо) і спрямовуються до блока 4, який одночасно від блока 5 за запитом отримує значення відповідних еталонів і порівнює інформацію від блока 3 з еталонною шкалою блока 5. Інформація з блока 4 надходить до блока 6, де виконується оцінка якості даних за достовірністю, актуальністю, точністю та їх фільтрація (відбір). Відібрані дані з блока 6 надходять до блока 7. До блока 7 також надходять дані про складові моделі керування в ГІС для заданого кола рішень з блока 8. У блоці 7 виконується обробка вибраних даних, при цьому за матеріалами обробки, що передаються з блока 7 до блока 9, в останньому виконується ймовірнісна оцінка якості ГІС за критеріями розрізнення, точності та достовірності інформації, результат оцінки для кожного завдання, що вирішується в блоці 7, передається із блока 9 до блока 7 і враховується при подальшій підготовці рекомендованого рішення з керування. Блок 10 приймає інформацію з блока 7 щодо результату виконання об'єктом 2 команди поточного управляючого сигналу, а також із блока 1 - передається інформація про вміст і час відправлення сигналу, за цими даними в блоці 10 виробляється оцінка ритму та ефективності виконання команди. Результат оцінки передається з блока 10 до блока 12. У блоці 12 за інформацією з блока 7 та блока 10 виконується оцінка поточної ситуації та прогноз її розвитку, для чого блок 12 містить асоціативну нейронну машину. З блока 12 інформація про поточну ситуацію передається до блока 13 з завданням щодо необхідного коригування програми керування. Блок 13 надсилає запит до блока 11 про додаткові резервні програми для корегування основних програм за наявності позаштатних ситуацій. Ці програми з блока 11 передаються до блока 13. Блок 13 передає до блока 12 інформацію про можливе корегування програми керування. Блок 12 передає в блок 1 відеоінформацію, з оцінкою поточної ситуації і її перспективного розвитку, про імовірнісний розвиток ситуації. Блок 15 формує в стислому вигляді відеоінформацію про ретроспективні аналоги поточної ситуації і її розвиток та коментарі у вигляді типових випадків ретроспективи та передає її до блока 1. Блок 13 передає до блока 14 інформацію з рекомендацією конкретних заходів та основних варіантів вирішення завдання керування з оцінкою кожного варіанта за такими основними параметрами керування: як ймовірністю, точністю, економічною ефективністю тощо. Блок 14 формує рекомендований сигнал керування (рішення), який надходить до блока 1 у стислому вигляді як відеоматеріали, при цьому в блоці 1 здійснюється вибір остаточного варіанта керування з рейтинговою оцінкою альтернативного варіанта (варіантів) вирішення завдання керування. Цей вибір здійснюється керівником, експертною групою або експертом (менеджером) залежно від поточного завдання і стану системи керування: ухвалюються рішення щодо вмісту сигналу керування та часу його відправлення. Таким чином, представлена інтелектуальна система геоінформаційної підтримки керування територіальними об'єктами дозволяє істотно підвищити інтелектуальний рівень керування територіальними об'єктами точність та достовірність оцінки ситуації і оперативність керування. Джерела інформації: 3 UA 109367 C2 5 10 15 20 1. Патент України на винахід № 88899, МПК (2009) G06G 7/00 G06N 5/00 G06F 17/00. Система для формування знань засобами штучного інтелекту в умовах невизначеності та неповноти вхідної інформації / Парняков Є. С, Блохіна М. В.; заявник і патентовласник Чернігівський державний інститут економіки і керування. - № а200610741; заявл. 11.10.2006; опубл. 10.12.2009, бюл. № 23. 2. Патент України на винахід № 95319, МПК (2011.01) G09B 19/00. Інтелектуальна система тренажерного навчання геодезичним вимірам / Бурачек В. Г., Зацерковний В. І., Параніч В. П., Коледа О. Д., Хомушко Д. В.; заявник і патентовласник Коледж інформаційних технологій та землевпорядкування НАУ. - № а200905349; заявл. 28.05.2009; опубл. 25.07.2011, бюл. № 14. 3. Осипов В. Ю. Моделирования морских транспортных систем на основе интеллектуальных геоинформационных систем / В. Ю. Осипов // Международная научно-практическая конференция "Имитационное и комплексное моделирование морской техники и морских транспортных систем" - "ИКМ МТМТС 2011". Труды конференции. - Санкт-Петербург: ОАО "Центр технологии судостроения и судоремонта", 2011. - С. 88-92. 4. Верченов А. Д. Разработка интеллектуальной геоинформационной системы в задачах диагностирования территориально производственных систем / А. Д. Верченов, Н. В. Караева, А. А. Верлань // Ученые записки Таврич. нац. ун-та. Сер. "География". - Симферополь: Таврич. нац. ун-т им. В.И. Вернадского, 2011. - Том 24 (63). - №. 3. - С. 33-43. 5. Моделирование состояния и прогнозирование развития региональных экономических и энергетических систем / [Э. Г. Альбрехт, Л. Л. Богатырев, А. В. Бочегов и др.]; под ред. А. И. Татаркина, А. А. Макарова. - РАН, УрО, Ин-т экономики, Ин-т теплофизики, Ин-т энергетических исследований. - И.: ЗАО Изд-во "Экономика", 2004. - 462 с. ФОРМУЛА ВИНАХОДУ 25 30 35 40 45 50 55 60 Інтелектуальна система геоінформаційної системи (ГІС) підтримки керування територіальними об'єктами, що містить: ситуаційний центр системи керування (16), об'єкт керування (2), блок порівняння (4), блок еталонів (5), блок обробки інформації (7), блок математичних моделей (8), блок резервних програм (11), блок корекції програм обліку відхилень характеристик об'єкта від заданих параметрів (13), блок контролю стану і динаміки територіальних об'єктів (3), яка відрізняється тим, що додатково містить блок геоінформаційної підтримки прийняття рішень (1), який суміщений з ситуаційним центром системи керування (16) і який сформований як канал зворотного зв'язку, а також в цьому блоці сформовані три канали відеоінформації на топографічній картині зображення поточної ситуації для прийняття рішення про сигнал керування: канал рекомендованого сигналу керування, канал типових ретроспективних аналогів ситуації і канал поточної ситуації та прогнозування, що включає в себе електронні блоки: блок оцінки поточної ситуації та прогнозування, що містить асоціативну нейронну машину (12), блок оцінки якості та фільтрації даних (6), блок оцінки якості ГІС (9), блок оцінки ритму керування (10), при цьому перший вихід блока геоінформаційної підтримки прийняття рішень (1) електрично зв'язаний з другим входом блока математичних моделей (8), другий вихід блока геоінформаційної підтримки прийняття рішень (1) електрично зв'язаний з першим входом блока формування типових ретроспективних аналогів ситуації (15), третій вихід блока геоінформаційної підтримки прийняття рішень (1) електрично зв'язаний з другим входом блока оцінки ритму керування (10), а перший вхід блока геоінформаційної підтримки прийняття рішень (1) електрично зв'язаний з першим виходом блока обробки інформації (7), другий вхід блока геоінформаційної підтримки прийняття рішень (1) електрично зв'язаний з виходом блока вибору рекомендованого сигналу керування, третій вхід блока геоінформаційної підтримки прийняття рішень (1) електрично зв'язаний з виходом блока формування типових ретроспективних аналогів ситуації (15), четвертий вхід блока геоінформаційної підтримки прийняття рішень (1) електрично зв'язаний з третім виходом блока оцінки поточної ситуації та прогнозування (12), вихід об'єкта керування по радіоканалу зв'язаний з входом блока контрою стану і динаміки об'єкта (3), а вхід об'єкта керування по радіоканалу зв'язаний з виходом ситуаційного центра системи керування (16), вихід блока контрою стану і динаміки об'єкта електрично зв'язаний з другим входом блока порівняння (4), перший вихід блока порівняння (4) електрично зв'язаний з першим входом блока еталонів (5), другий вихід блока порівняння (4) електрично зв'язаний з входом блока оцінки якості та фільтрації даних (6), а перший вхід блока порівняння (4) електрично зв'язаний з першим виходом блока еталонів (5), другий вихід блока еталонів (5) електрично зв'язаний з першим входом блока математичних моделей (8), а другий вхід блока еталонів (5) електрично зв'язаний з першим виходом блока математичних моделей (8), перший вихід блока оцінки якості та фільтрації даних (6) електрично зв'язаний з другим входом блока 4 UA 109367 C2 5 10 15 20 оцінки якості ГІС (9), другий вихід блока оцінки якості та фільтрації даних (6) електрично зв'язаний з другим входом блока обробки інформації (7), другий вихід блока обробки інформації (7) електрично зв'язаний з першим входом блока оцінки якості ГІС (9), третій вихід блока обробки інформації (7) електрично зв'язаний з першим входом блок оцінки ритму керування (10), четвертий вихід блока обробки інформації (7) електрично зв'язаний з другим входом блока оцінки поточної ситуації та прогнозування (12), а перший вхід блока обробки інформації (7) електрично зв'язаний з другим виходом блока математичних моделей (8), третій вхід блока обробки інформації (7) електрично зв'язаний з виходом блока оцінки якості ГІС (9), третій вихід блока математичних моделей (8) електрично зв'язаний з першим входом блока резервних програм (11), перший вихід блок оцінки ритму керування (10) електрично зв'язаний з третім входом блока оцінки поточної ситуації та прогнозування (12), другий вихід блока оцінки ритму керування (10) електрично зв'язаний з другим входом блока корекції програм обліку відхилень характеристик об'єкта від заданих параметрів (13), вихід блока резервних програм (11) електрично зв'язаний з першим входом блока корекції програм обліку відхилень характеристик об'єкта від заданих параметрів (13), а другий вхід блока резервних програм (11) електрично зв'язаний з другим виходом блока корекції програм обліку відхилень характеристик об'єкта від заданих параметрів (13), перший вихід блока оцінки поточної ситуації та прогнозування (12) електрично зв'язаний з другим входом блока формування типових ретроспективних аналогів ситуації (15), другий вихід блока оцінки поточної ситуації та прогнозування (12) електрично зв'язаний з третім входом блока корекції програм обліку відхилень характеристик об'єкта від заданих параметрів (13), перший вихід блока корекції програм обліку відхилень характеристик об'єкта від заданих параметрів (13) електрично зв'язаний з входом блока вибору рекомендованого сигналу керування (14). Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Автори англійськоюBurachek Vsevolod Hermanovych, Donets Volodymyr Volodymyrovych, Zatserkovnyi Vitalii Ivanovych, Krelshtein Petro Davydovych
Автори російськоюБурачек Всеволод Германович, Донец Владимир Владимирович, Зацерковный Виталий Иванович, Крельштейн Петр Давидович
МПК / Мітки
МПК: G05B 19/418, G06G 7/48, G06Q 10/04
Мітки: об'єктами, підтримки, системі, система, інтелектуальна, геоінформаційної, керування, територіальними
Код посилання
<a href="https://ua.patents.su/7-109367-intelektualna-sistema-geoinformacijjno-sistemi-pidtrimki-keruvannya-teritorialnimi-obehktami.html" target="_blank" rel="follow" title="База патентів України">Інтелектуальна система геоінформаційної системи підтримки керування територіальними об’єктами</a>
Система керування функціональними режимами радіолокаційної станції
Номер патенту: 30978
Опубліковано: 25.03.2008
Автори: Челпанов Артем Володимирович, Вовк Олександр Іванович, Карлов Володимир Дмитрович, Шматков Сергій Ігорович
МПК: G01S 13/52
Мітки: режимами, станції, функціональними, керування, система, радіолокаційної
Формула / Реферат:
Система керування функціональними режимами радіолокаційної станції (РЛС), що містить вузол обробки інформації, вузол керування ресурсами РЛС та вузол керування режимом супроводу у складі послідовно включених блока класифікації, блока розподілу заявок на супровід цілей і блока оцінки потрібної енергії, яка відрізняється тим, що додатково введені: послідовно з'єднані блок оцінки інтенсивності потоку цілей і блок групування цілей, послідовно...
Інтелектуальна система тренажерного навчання геодезичних вимірів
Номер патенту: 95319
Опубліковано: 25.07.2011
Автори: Параніч Віктор Петрович, Хомушко Дмитро Валерійович, Коледа Олеся Дмитрівна, Зацерковний Віталій Іванович, Бурачек Всеволод Германович
МПК: G09B 19/00
Мітки: вимірів, тренажерного, інтелектуальна, навчання, система, геодезичних
Формула / Реферат:
Інтелектуальна система тренажерного навчання геодезичних вимірів, що містить імітатор візуальної візирної картини, блок введення даних, з'єднаний з першим входом блока аналізу та порівняння даних, один вихід якого безпосередньо, а дугий через блок навчальних коментарів з'єднані з інформаційним дисплеєм, та програмний блок, яка відрізняється тим, що в неї додатково введені блок вибору виду та класу вимірів (БВВКВ), блок випадкового вибору...
Система керування
Номер патенту: 66917
Опубліковано: 15.06.2004
Автори: Чигирин Олег Трохимович, Маранов Олександр Вікторович, Чигирин Юрій Трохимович
МПК: G06F 11/16, G06F 11/00
Формула / Реферат:
Система керування, що складається з багаторозрядного цифрового лічильного каналу, дешифратора, схеми керування, яка включає формувач і два елементи затримки, і генератора, вихід якого з'єднано з першими входами першого багаторозрядного цифрового лічильного каналу, схеми керування і дешифратора, вихід якого з'єднано з виходом системи керування, вхід схеми керування через перший елемент затримки, перший формувач і другий елемент затримки...
Інтелектуальна система тренажерного навчання геодезичним вимірам
Номер патенту: 46414
Опубліковано: 25.12.2009
Автори: Коледа Олеся Дмитрівна, Бурачек Всеволод Германович, Хомушко Дмитро Валерійович, Параніч Віктор Петрович, Зацерковний Віталій Іванович
МПК: G09B 19/00, G01C 15/00
Мітки: тренажерного, геодезичним, вимірам, навчання, система, інтелектуальна
Формула / Реферат:
Інтелектуальна система тренажерного навчання геодезичним вимірам, яка містить імітатор візуальної візирної картини (ІВВК), обчислювальні засоби, що містять у собі блок введення даних (БВД), блоки перетворення інформації і програм, блоки аналізу інформації, блок навчальних коментарів (БНК) та інформаційний дисплей, яка відрізняється тим, що містить блок вибору виду та класу вимірів (БВВКВ), блок випадкового вибору варіанта програми вимірів...
Система керування ракети в каналі тангажа
Номер патенту: 98664
Опубліковано: 12.05.2015
Автори: Дорощук Катерина Ігорівна, Симонов Володимир Федорович
МПК: B64C 13/16
Мітки: каналі, тангажа, система, ракети, керування
Формула / Реферат:
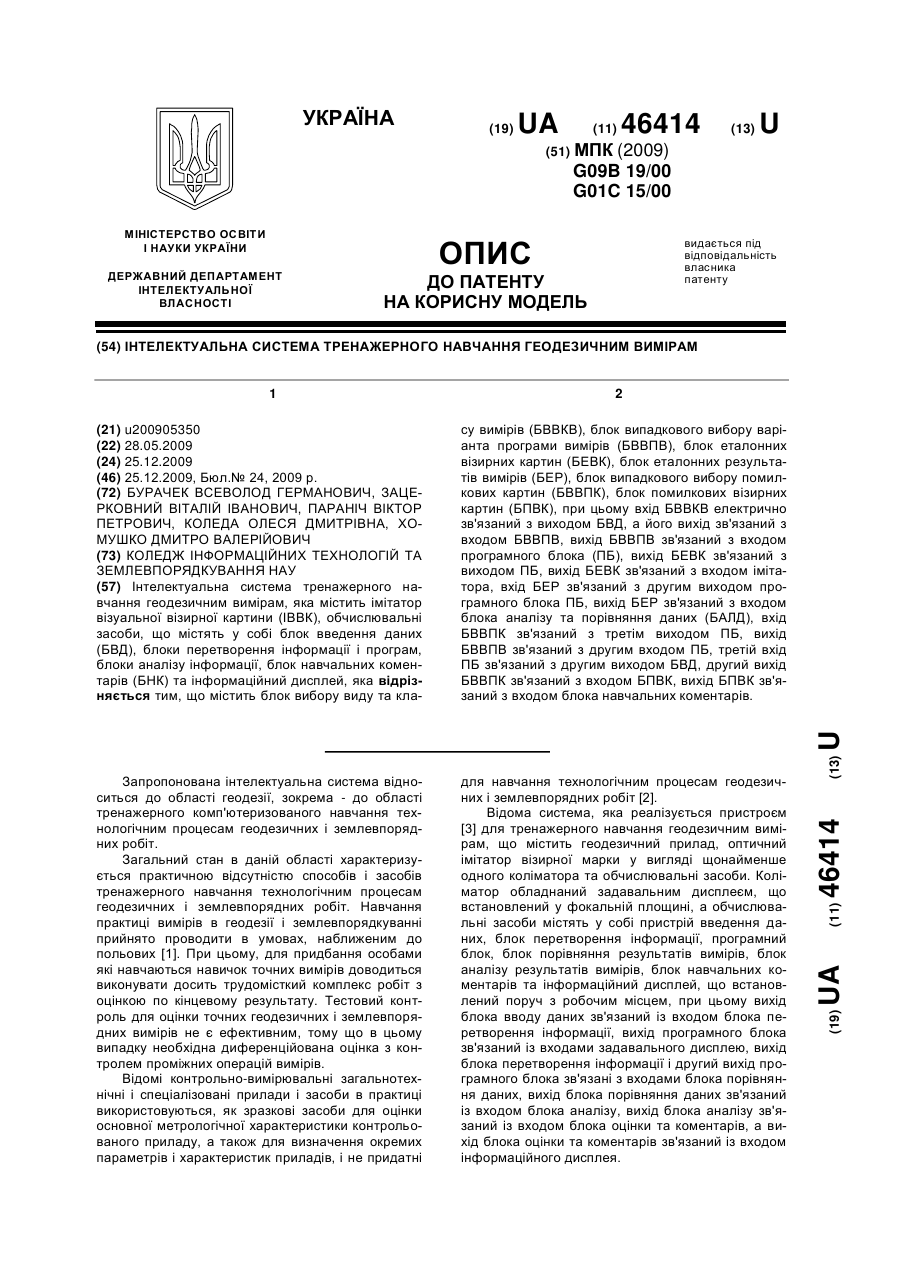
Система керування ракети в каналі тангажа, яка містить блок датчиків кута тангажа, вихід якого з'єднаний з входом блока узгоджувальних пристроїв датчиків, вихід блока узгоджувальних пристроїв датчиків з'єднаний з входом блока бортової цифрової обчислювальної машини, вихід блока бортової цифрової обчислювальної машини з'єднаний з входом блока узгоджувальних пристроїв сервоприводів, вихід блока узгоджувальних пристроїв сервоприводів з'єднаний...
Попередній патент: Поплавковий гіроскоп
Наступний патент: Компактний електродуговий вібратор рідкого металу
Випадковий патент: Рлс виявлення літака