Спосіб “механоплан” переміщення тягово-транспортного засобу
Номер патенту: 115641
Опубліковано: 25.04.2017
Автори: Борисенко Тарас Миколайович, Петров Леонід Миколайович
Формула / Реферат
Спосіб переміщення тягово-транспортного засобу за допомогою гусеничного обводу, який полягає в наданні гусеничному обводу обертального руху, який відрізняється тим, що ведуча зірочка вільно обертається відносно гусеничного обводу з можливістю локального поєднання гусеничного обводу та навантажувально-натяжного рушія в зоні плями контакту шляхом гальмування розвантажувально-навантажувальної зірочки та створення сили поштовху з паралельним поєднанням дії реакції опорної поверхні та реакції ланцюга.
Текст
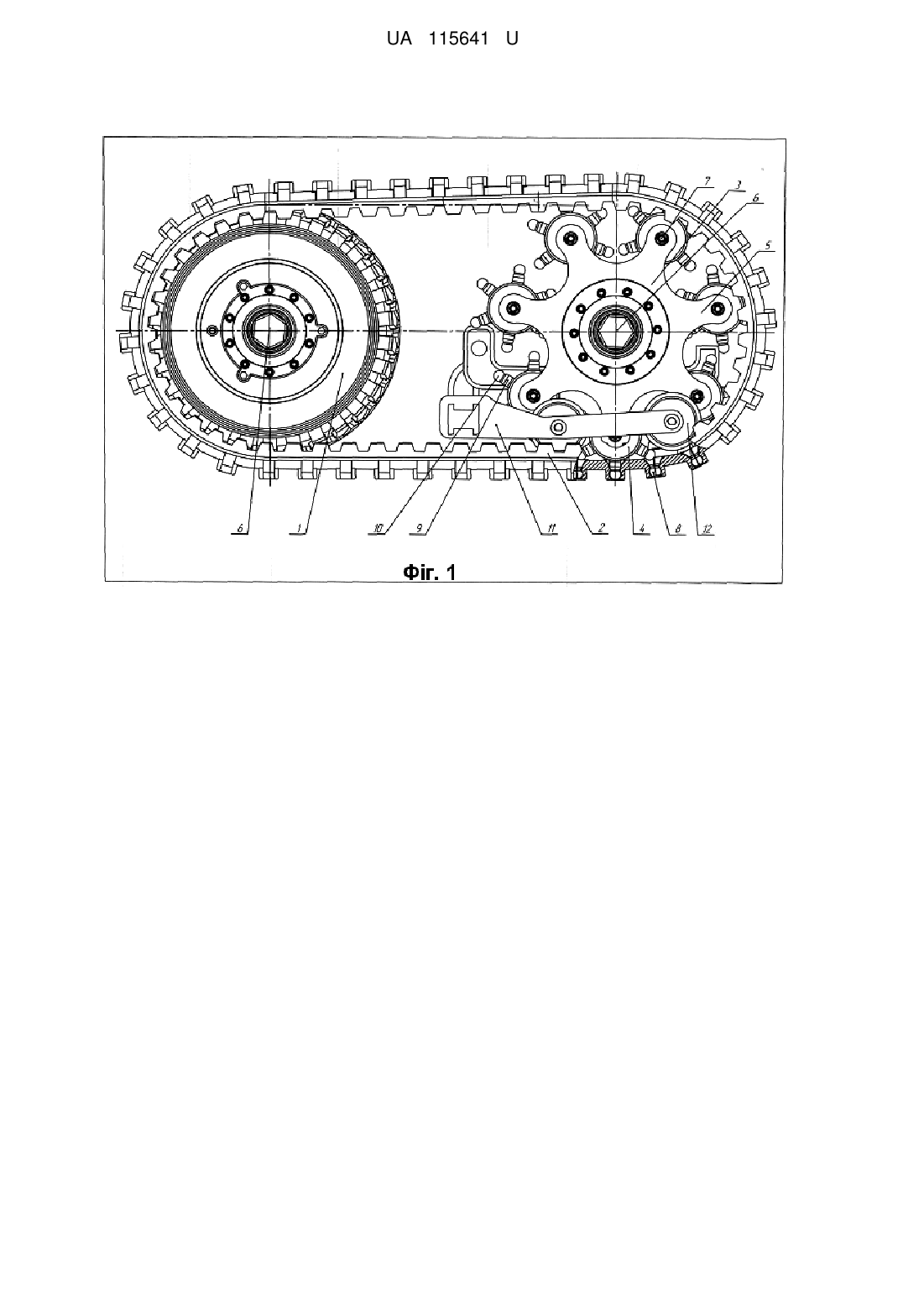
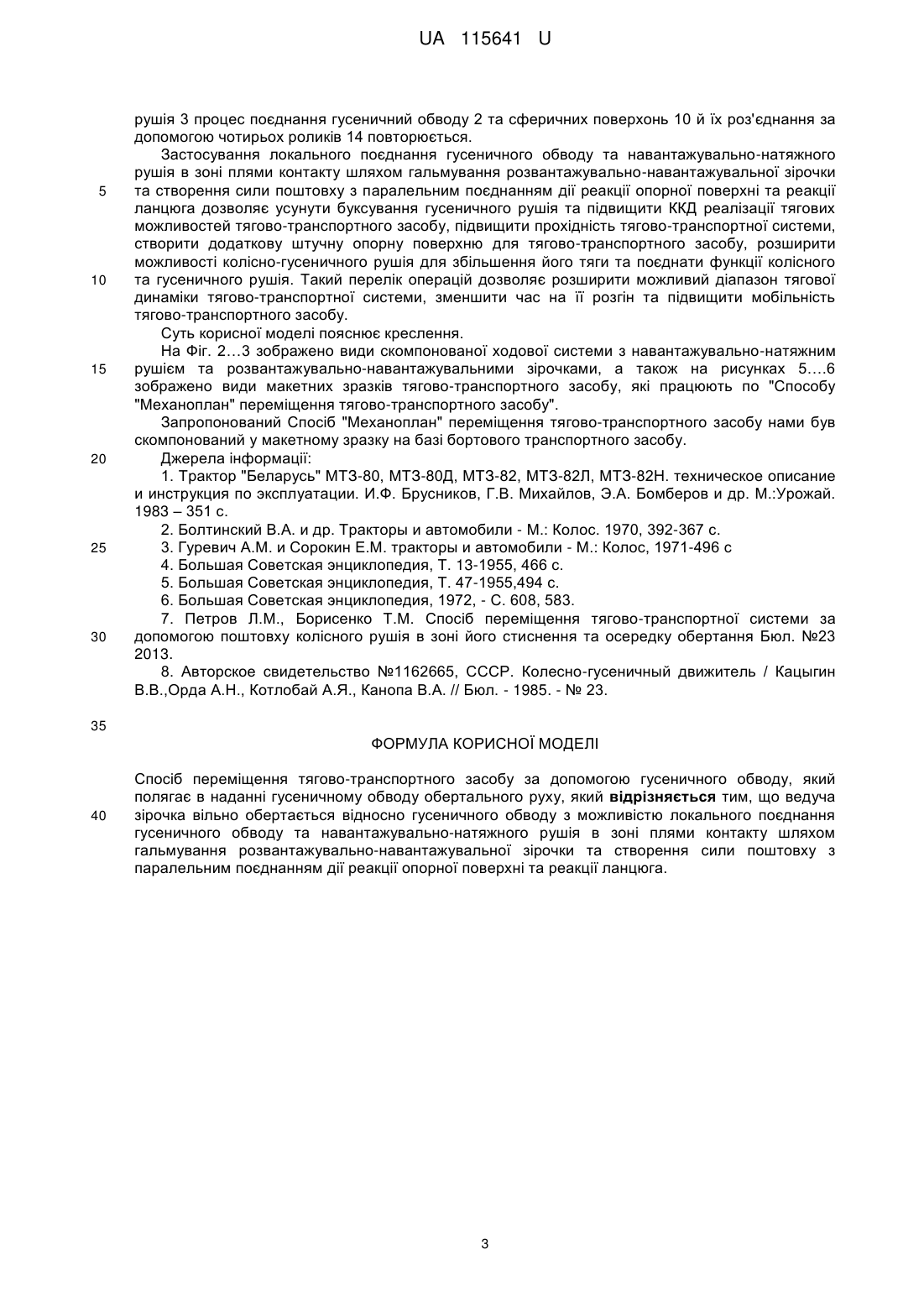
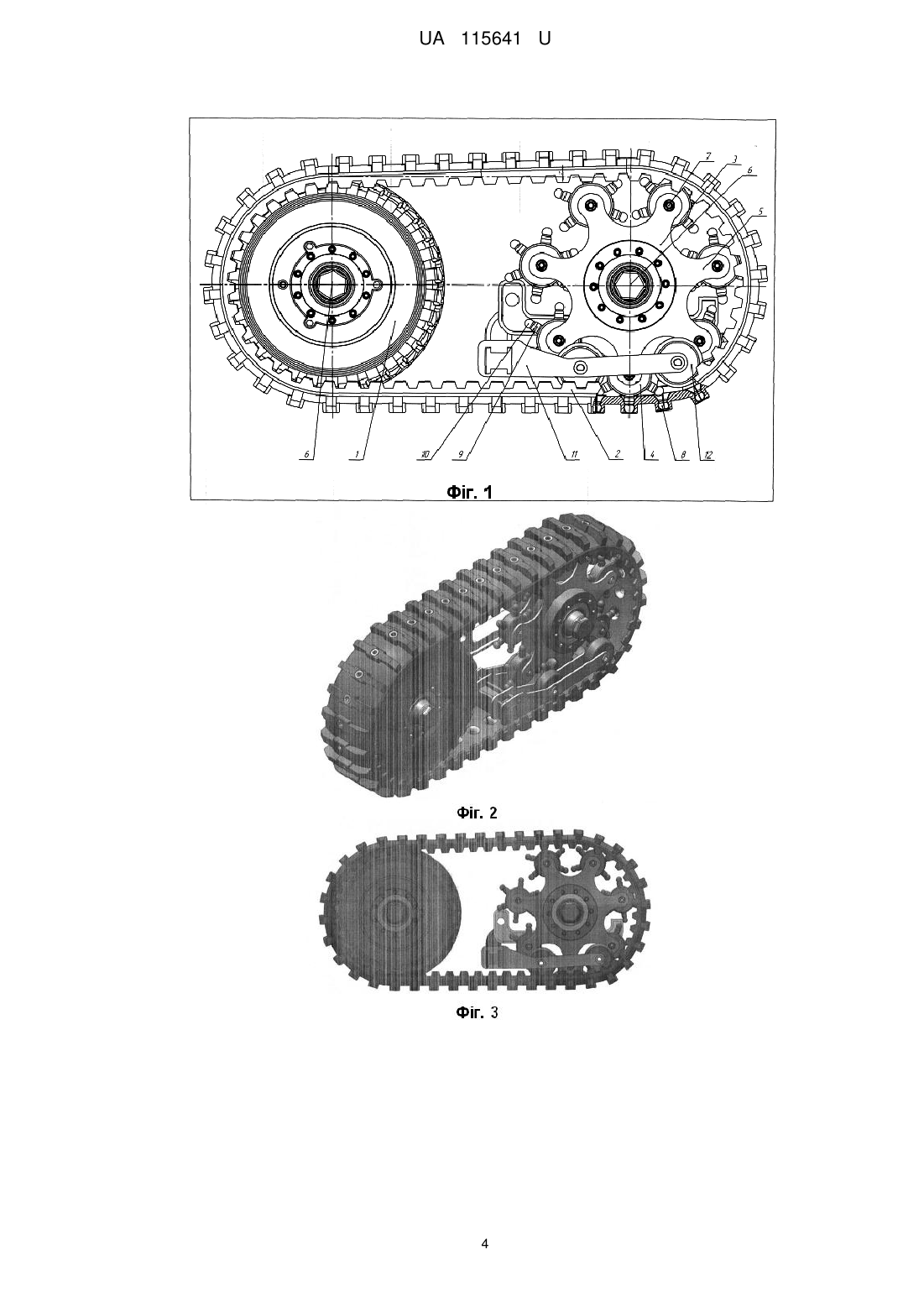
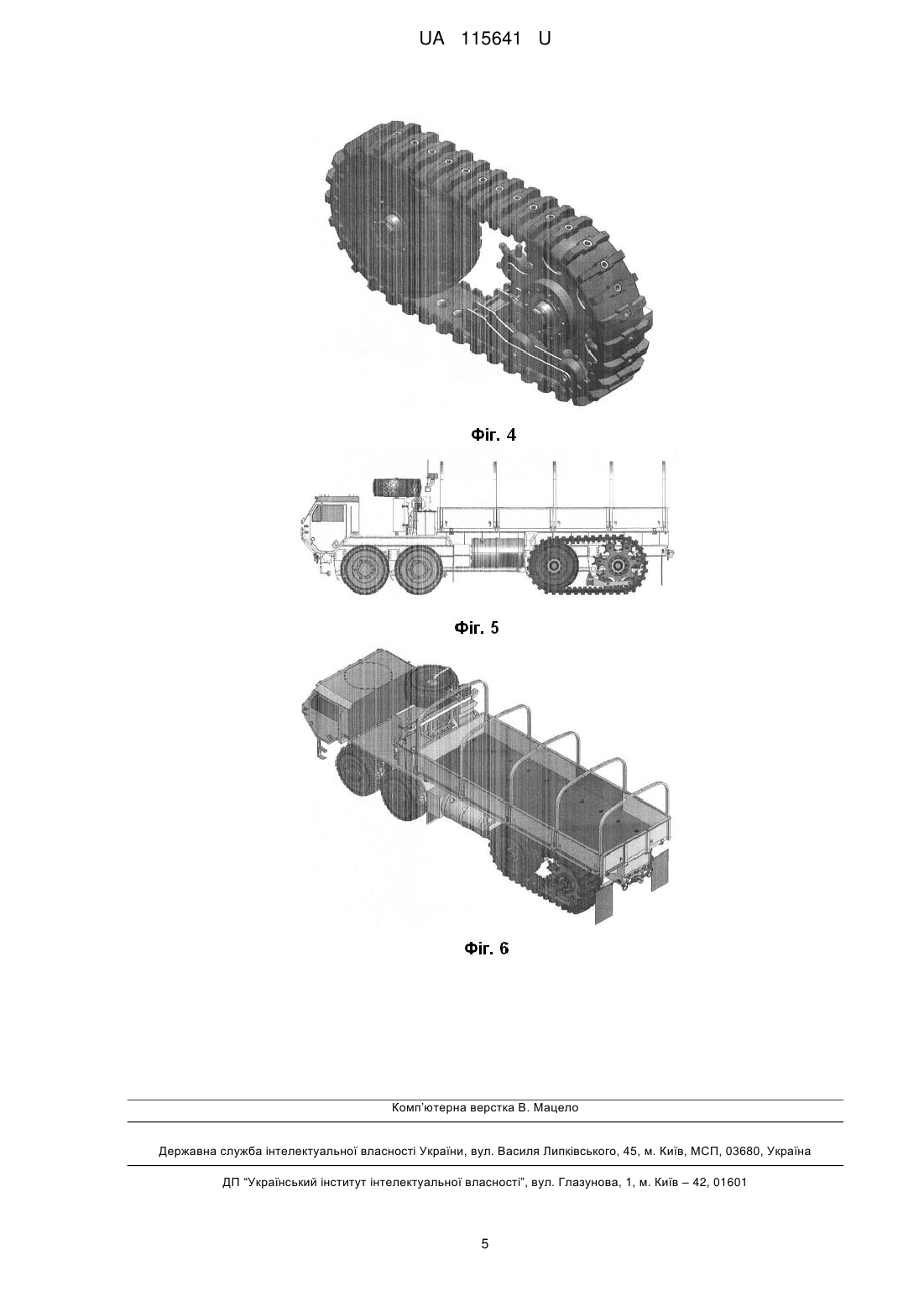
Реферат: Спосіб переміщення тягово-транспортного засобу за допомогою гусеничного обводу полягає в наданні гусеничному обводу обертального руху. Ведуча зірочка вільно обертається відносно гусеничного обводу з можливістю локального поєднання гусеничного обводу та навантажувально-натяжного рушія в зоні плями контакту шляхом гальмування розвантажувально-навантажувальної зірочки та створення сили поштовху з паралельним поєднанням дії реакції опорної поверхні та реакції ланцюга. UA 115641 U (54) СПОСІБ "МЕХАНОПЛАН" ПЕРЕМІЩЕННЯ ТЯГОВО-ТРАНСПОРТНОГО ЗАСОБУ UA 115641 U UA 115641 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі спеціального машинобудування, зокрема до способів переміщення тягово-транспортних засобів. Відомий спосіб підвищення тягових можливостей, який виконується трактором з механічним довантаженням [1], де є кронштейн, в якому виконано ряд отворів, що призначені для кріплення переднього кінця центральної тяги начіпного механізму. Під час руху тракторного агрегату із заглибленими робочими органами, тяговий опір знаряддя викликає в нижніх тягах розтягуючи, а в верхніх стискаюче зусилля. Частина якого (вертикальна складова) викликає довантаження задніх коліс. Переставляючи точку приєднання центральної тяги начіпного механізму змінюють довантаження задніх коліс. Чим нижче розташована на кронштейні точка приєднання, тим більше зусилля довантаження і навпаки. Недоліком такого способу довантаження ведучих коліс є те, що його ефективно можна використовувати тільки з машинами, в яких тягове зусилля перевищує їх власну вагу. Відомий спосіб підвищування тягових можливостей енергетичного засобу, при якому рівномірно розподіляється крутний момент між колісними рушіями [2]. Такий спосіб переміщення дозволяє підвищити прохідність енергетичного засобу у важких умовах експлуатації. Недоліком такого способу підвищення тягових можливостей енергетичного засобу є те, що в ньому застосовують певну кількість колісних рушіїв тільки одного призначення, а це зменшує ККД енергетичного модуля, і як наслідок, зменшує ефективність застосування високопрохідної автомобільної техніки. Конструкція для виконання цього способу відомою автомобільною технікою не дозволяє розташувати на неї додаткове обладнання для підвищення прохідності через його пошкодження під час зміни напрямку руху. Відомий спосіб навантаження ходової системи транспортного засобу (ТЗ), для виконання якого на ньому вздовж параметру конструкції розміщені крокові рушії [3]. Такий спосіб навантаження ходової системи транспортного засобу дозволяє покращити ефективність процесу виконання роботи в умовах відсутності будь-якого шляху. Недоліком цього способу підвищення навантаження ходової системи транспортного засобу є те, що технологічний процес підвищення тягових можливостей транспортного засобу за допомогою крокового рушія знижує показники прохідності на слабо зв'язаних ґрунтах, а це пов'язано з циклічністю у черзі операцій по переносу ТЗ з однієї точки у другу, що призводить до непрацездатних витрат часу, а також знижує швидкість переміщення. Найбільш близьким аналогом, вибраним за прототип, є спосіб з механізмом навантаження ходової системи ТЗ, в якому шляхом перестановки верхньої тяги начіпного пристрою відносно вертикальної стійки знаряддя з крайнього верхнього положення вниз миттєвий центр обертання начіпного знаряддя переміщують у точку, яка розташована ближче до осі ведучих коліс, і тоді сприймається опорним колесом знаряддя [4, 5]. Зменшення кута нахилу верхньої тяги супроводжується навантаженням опорних коліс знаряддя на ґрунт та збільшенням його на передні колеса. Використання такого пристрою дозволяє підвищити тягові можливості ТЗ при малих витратах енергії при виконанні роботи. Недоліком такого способу є підвищення опору руху, збільшення витрати потужності двигуна на переміщення ТЗ, а також погіршення якості технологічного процесу. Відомий спосіб підвищення динамічності тягово-транспортного засобу і мобільний енергетичний засіб для його виконання в якому вздовж периметра конструкції розміщені крокові рушії [6]. В основу корисної моделі поставлена задача мобільний енергетичний засіб дозволяє підвищити динамічність виконання технологічного процесу в умовах відсутності будь-якого шляху. Поставлена задача вирішується тим, що технологічний процес підвищення динамічності за допомогою крокового рушія пов'язаний з циклічністю у черзі операцій по переносу ваги енергетичного засобу одної опорної точки у другу, а це приводить до непрацездатних витрат часу, що знижує швидкість переміщення. Перенесення великої ваги, яка прикладається до опорних точок приводів, знижує показники прохідності на слабо зв'язаних ґрунтах. Відомий спосіб переміщення тягово-транспортної системи за допомогою поштовху колісного рушія в зоні його стиснення та осередку обертання може бути виконаний за конкретним прикладом. Запропонований спосіб включає тягово-транспортну систему, до колісного рушія за допомогою гребінки, важеля та динамічної ваги і підтримуючого ролика, які за допомогою важеля та ланки шарнірно закріплені на осі на якій закріплений колісний рушій. До ланки жорстко приєднаний важіль з загнутим кінцем. До зігнутого кінця горизонтальним шарніром під'єднано важіль поштовху. Важіль поштовху за допомогою вертикального шарніра опирається 1 UA 115641 U 5 10 15 20 25 30 35 40 45 50 55 на опорну поверхню керуючим колесом. На вертикальній осі співвісна закріплено стабілізатор стійкості. Загнутий кінець важеля кінематично за допомогою пружини розтягу зв'язано з важелем поштовху. Такий спосіб переміщення тягово-транспортної системи за допомогою поштовху колісного рушія в зоні його стиснення та осередку обертання здійснюють таким чином. При здійсненні процесу переміщення тягово-транспортної системи колісний рушій починає обертати в напрямку руху проти годинникової стрілки і за допомогою гребінки динамічна вага відхиляється в тому ж напрямку важіль вигинається, накопичуючи при цьому потенціальну енергію. Одночасно з цим жорстко приєднаний важіль з загнутим кінцем відхиляється вверх, пружина стискається, а керуюче колесо наближується до колісного рушія за допомого важелю поштовху, який провертається у горизонтальному шарнір. При виконанні таких операційних дій ланка та підтримуючий ролик стабілізують заданий рух важеля відносно динамічної ваги, а вертикальний шарнір із стабілізатором стійкості забезпечують копіювання руху відносно поздовжньої осі тягово-транспортної системи. У процесі руху тягово-транспортної системи динамічна вага, яка відхилена на величину висоти гребінки під дією вивільнення енергії стиснутої пружини розтягу отримує силу поштовху. Сила поштовху передається за допомогою загнутого кінця жорстко приєднаного важіль та ланки. Одночасно підтримуючий ролик перекочується по диску забезпечує ланку зайняти вертикальне положення. В подальшому процес повторюється. Такий спосіб переміщення тягово-транспортної системи за допомогою поштовху колісного рушія в зоні його стиснення та осередку обертання дозволяє знизити тяговий опір пересуванню тягово-транспортної системи при виконанні технологічного процесу її пересуванню. Недоліком такого способу є те, що спосіб переміщення тягово-транспортної системи за допомогою поштовху колісного рушія в зоні його стиснення та осередку обертання, крутний момент відносно плями контакту поділяють на активний та реактивний, який спрямовують в тому ж напрямку, що і напрямок активного, при цьому реактивний момент застосовують відносно осередку плями контакту, а силу поштовху прикладають до осі колісного рушія та його деформованої частини. Такий перелік операцій приводить до динамічного навантаження трансмісії, а також сприяє можливій зміні заданого напрямку руху. Відомий колісно-гусеничний рушій [8] в якому, з метою зниження витрати енергії при повороті, він оснащений установленими між рамою і роликами гідроциліндрами, ролики закріплені на рамі з можливістю їх повороту в горизонтальній площині, а кожний трак гусеничного ланцюга виконаний із двох з'єднаних між собою вертикальним шарніром і взаємно підпружинених частин, а також рушій відрізняється тим, що ролики з'єднані з рамою шарнірно з можливістю відносного пружного переміщення у вертикальній площині. Недоліком такого способу є те, що при цьому способі рушійною силою є реакція опорної поверхні, яка не завжди відповідає умовам навантаження гусеничного рушія, а тому виникає буксування. Спосіб "Механоплан" переміщення тягово-транспортного засобу, фіг. 1, включає: колісний рушій 1, гусеничний обвід 2, навантажувально-натяжний рушій 3, при цьому навантажувальнонатяжний рушій 3 виконується з семи розвантажувально-навантажувальних зірочок 4, які спицями 5 жорстко приєднані до маточини 6, розвантажувально-навантажувальні зірочки 4 вільно обертаються біля обертальних маточин 7, гусеничний обвід 2 на зовнішній периферії включає в себе технологічні отвори 8, на зовнішній поверхні розвантажувальнонавантажувальних зірочок 4 розташовані шість пальців 9, які закінчуються сферичною поверхнею 10. До мосту тягово-транспортного засобу (на кресленні не зображено) приєднано важіль 11 на якому за допомогою осей 12 та 13 встановлено чотири ролики 14. Робочий процес запропонованим способом "Механоплан" переміщення тяговотранспортного засобу, фіг. 1, здійснюється таким чином: при переміщенні тягово-транспортного засобу крутний момент від двигуна підводиться до колісного рушія 1 та маточина 6 навантажувально-натяжного рушія 3. При обертанні на маточині 6 разом із нею обертаються спиці 5, а також на обертальній маточина 7 обертаються розвантажувально-навантажувальні зірочки 4. При обертанні розвантажувально-навантажувальних зірочок 4 в зоні контакту гусеничного обводу та навантажувально-натяжного рушія з опорною поверхнею пальці 9 з сферичною поверхнею 10 входять в технологічні отвори 8 гусеничного обводу 2, розтискають ці отвори, обертальний рух розвантажувально-навантажувальних зірочок 4 при куті 30 градусів на обертальний рух маточині 5 припиняється. Таким чином пальці 9 та сферична поверхня 10 і технологічний отвір 8 складають єдине ціле. При подальшому обертанні навантажувальнонатяжного рушія 3 чотири ролики 14, обертаючись на осях 12 та 13, знімають з сферичних поверхонь 10 гусеничний обвід 2. При подальшому обертанні навантажувально-натяжного 2 UA 115641 U 5 10 15 20 25 30 рушія 3 процес поєднання гусеничний обводу 2 та сферичних поверхонь 10 й їх роз'єднання за допомогою чотирьох роликів 14 повторюється. Застосування локального поєднання гусеничного обводу та навантажувально-натяжного рушія в зоні плями контакту шляхом гальмування розвантажувально-навантажувальної зірочки та створення сили поштовху з паралельним поєднанням дії реакції опорної поверхні та реакції ланцюга дозволяє усунути буксування гусеничного рушія та підвищити ККД реалізації тягових можливостей тягово-транспортного засобу, підвищити прохідність тягово-транспортної системи, створити додаткову штучну опорну поверхню для тягово-транспортного засобу, розширити можливості колісно-гусеничного рушія для збільшення його тяги та поєднати функції колісного та гусеничного рушія. Такий перелік операцій дозволяє розширити можливий діапазон тягової динаміки тягово-транспортної системи, зменшити час на її розгін та підвищити мобільність тягово-транспортного засобу. Суть корисної моделі пояснює креслення. На Фіг. 2…3 зображено види скомпонованої ходової системи з навантажувально-натяжним рушієм та розвантажувально-навантажувальними зірочками, а також на рисунках 5….6 зображено види макетних зразків тягово-транспортного засобу, які працюють по "Способу "Механоплан" переміщення тягово-транспортного засобу". Запропонований Спосіб "Механоплан" переміщення тягово-транспортного засобу нами був скомпонований у макетному зразку на базі бортового транспортного засобу. Джерела інформації: 1. Трактор "Беларусь" МТЗ-80, МТЗ-80Д, МТЗ-82, МТЗ-82Л, МТЗ-82Н. техническое описание и инструкция по эксплуатации. И.Ф. Брусников, Г.В. Михайлов, Э.А. Бомберов и др. М.:Урожай. 1983 – 351 с. 2. Болтинский В.А. и др. Тракторы и автомобили - М.: Колос. 1970, 392-367 с. 3. Гуревич A.M. и Сорокин Е.М. тракторы и автомобили - М.: Колос, 1971-496 с 4. Большая Советская энциклопедия, Т. 13-1955, 466 с. 5. Большая Советская энциклопедия, Т. 47-1955,494 с. 6. Большая Советская энциклопедия, 1972, - С. 608, 583. 7. Петров Л.М., Борисенко Т.М. Спосіб переміщення тягово-транспортної системи за допомогою поштовху колісного рушія в зоні його стиснення та осередку обертання Бюл. №23 2013. 8. Авторское свидетельство №1162665, СССР. Колесно-гусеничный движитель / Кацыгин В.В.,Орда А.Н., Котлобай А.Я., Канопа В.А. // Бюл. - 1985. - № 23. 35 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 Спосіб переміщення тягово-транспортного засобу за допомогою гусеничного обводу, який полягає в наданні гусеничному обводу обертального руху, який відрізняється тим, що ведуча зірочка вільно обертається відносно гусеничного обводу з можливістю локального поєднання гусеничного обводу та навантажувально-натяжного рушія в зоні плями контакту шляхом гальмування розвантажувально-навантажувальної зірочки та створення сили поштовху з паралельним поєднанням дії реакції опорної поверхні та реакції ланцюга. 3 UA 115641 U 4 UA 115641 U Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B62D 55/08, B62D 61/00
Мітки: спосіб, засобу, механоплан, переміщення, тягово-транспортного
Код посилання
<a href="https://ua.patents.su/7-115641-sposib-mekhanoplan-peremishhennya-tyagovo-transportnogo-zasobu.html" target="_blank" rel="follow" title="База патентів України">Спосіб “механоплан” переміщення тягово-транспортного засобу</a>
Спосіб переміщення тягово-транспортної системи за допомогою поштовху колісного рушія в зоні його стиснення та осередку обертання
Номер патенту: 85848
Опубліковано: 10.12.2013
Автори: Борисенко Тарас Миколайович, Петров Леонід Миколайович
МПК: B62D 1/00
Мітки: допомогою, системі, колісного, стиснення, рушія, обертання, переміщення, осередку, спосіб, тягово-транспортної, зони, поштовху
Формула / Реферат:
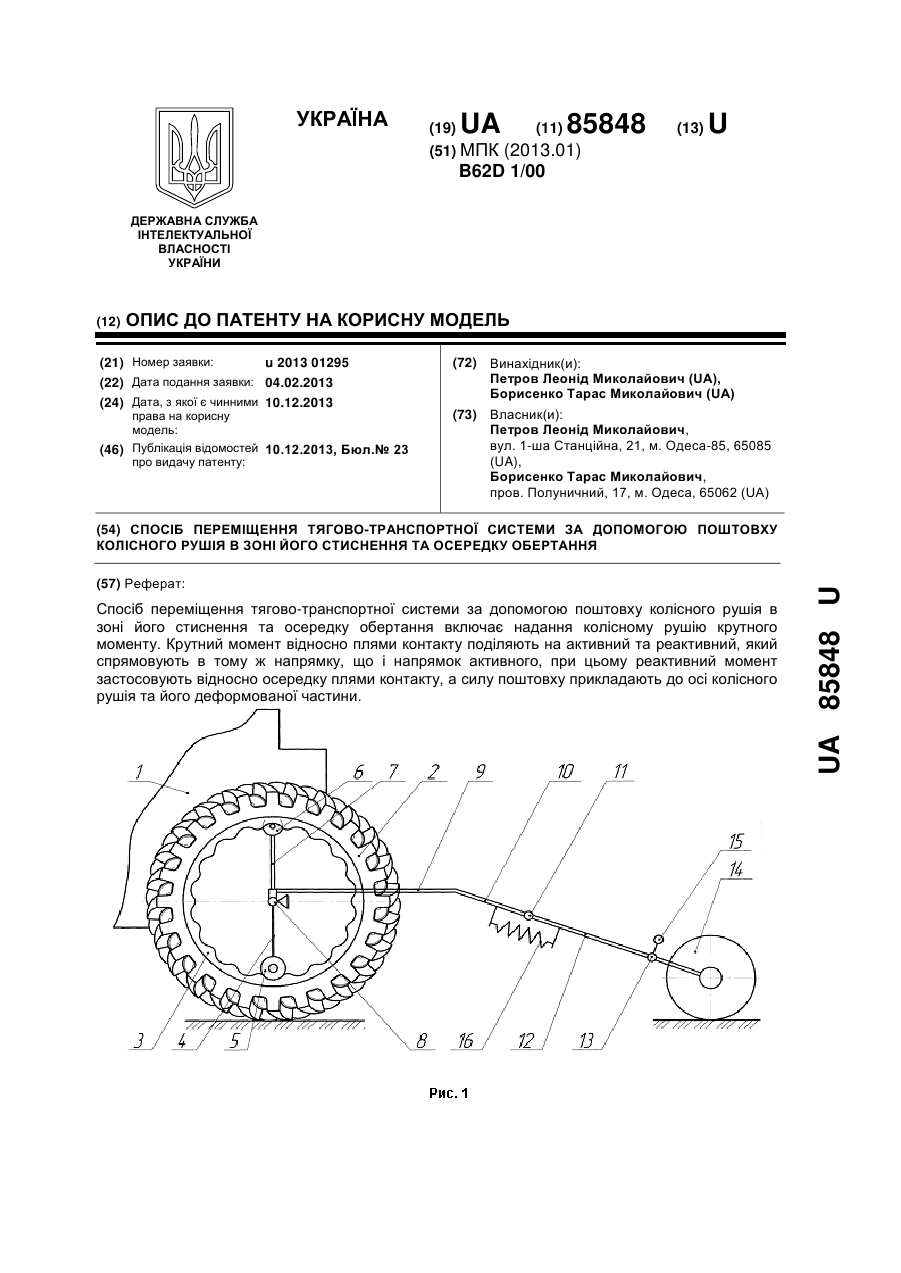
Спосіб переміщення тягово-транспортної системи за допомогою поштовху колісного рушія в зоні його стиснення та осередку обертання, який полягає в наданні колісному рушію крутного моменту, який відрізняється тим, що крутний момент відносно плями контакту поділяють на активний та реактивний, який спрямовують в тому ж напрямку, що і напрямок активного, при цьому реактивний момент застосовують відносно осередку плями контакту, а силу поштовху...
Спосіб переміщення тягово-транспортної системи
Номер патенту: 104401
Опубліковано: 25.01.2016
Автори: Борисенко Тарас Миколайович, Петров Леонід Миколайович
МПК: B62D 61/00, B62D 59/00
Мітки: спосіб, переміщення, тягово-транспортної, системі
Формула / Реферат:
Спосіб переміщення тягово-транспортної системи, що включає створення сили поштовху, яку прикладають до осі колісного рушія та його деформованої частини, який відрізняється тим, що силу поштовху, до якої докладають силу пневмоудару, та спрямовують їх сумісну дію на переміщення краплини важкого металу, кінетичну енергію якої прикладають до наступної фази обертання гнучко-пружного елемента.
Спосіб переміщення транспортного засобу білецького ю.о.

Номер патенту: 32724
Опубліковано: 26.05.2008
Автор: Білецький Юрій Олександрович
МПК: B63H 11/00
Мітки: спосіб, переміщення, білецького, ю.о, транспортного, засобу
Формула / Реферат:
1. Спосіб переміщення транспортного засобу за рахунок реактивної сили потоку текучого середовища, спрямованого в підводну зону в сторону, протилежну напряму руху, який відрізняється тим, що як текуче середовище використовують повітря, яке у вигляді повітряних бульок, підіймаючись потоком уверх по похилій поверхні транспортного засобу, утворює із водою реактивний потік.2. Спосіб за п. 1, який відрізняється тим, що потік повітря подають...
Пристрій для натяжіння гусеничного обводу транспортного засобу
Номер патенту: 47483
Опубліковано: 10.02.2010
Автори: Воронцов Сергій Миколайович, Єпіфанов Віталій Валерійович
МПК: B62D 55/00
Мітки: засобу, обводу, транспортного, пристрій, гусеничного, натяжіння
Формула / Реферат:
Пристрій для натяжіння гусеничного обводу транспортного засобу, що містить встановлені в корпусі останнього кривошипи, які несуть напрямні колеса, а також черв'ячний механізм з черв'ячним колесом та черв'яком, який відрізняється тим, що між кривошипами встановлено диференціал, водило якого закріплено до черв'ячного колеса, а центральні шестерні жорстко з'єднано з кривошипами.
Бі-інерційний спосіб переміщення енергетичного засобу л.м.петрова
Номер патенту: 13465
Опубліковано: 17.04.2006
Автори: Константінов Михайло Іванович, Овчинник Володимир Анатолійович, Ногінський Костянтин Олександрович, Петров Леонід Миколайович, Бєлохвост Олександр Вільович
МПК: B62D 61/00
Мітки: енергетичного, спосіб, засобу, бі-інерційний, переміщення, л.м.петрова
Формула / Реферат:
Спосіб переміщення енергетичного засобу, що включає переміщення шляхом підведення до колісного рушія крутного моменту і переміщення колісного рушія сумісно з елементами утворення конструкції енергетичного засобу, який відрізняється тим, що елементи конструкції енергетичного засобу ділять на окремі частини, одну з яких з'єднують з колісним рушієм, а другій відносно колісного рушія надають можливість переміщення у напрямку руху енергетичного...
Попередній патент: Спосіб вирощування допованих кристалів дигідрофосфату калію
Наступний патент: Засіб для лікування пролежнів і та іі стадій з мацерацією, мокнуттям та формуванням поверхневої виразки
Випадковий патент: Сплав для комплексного розкислювання сталі та закупорювання зливків киплячої сталі