Спосіб обчислення об’єму і площі бічної поверхні довільної опуклої фігури
Номер патенту: 18148
Опубліковано: 01.07.1997
Автори: Кормановський Сергій Іванович, Білан Степан Миколайович, Кожем'яко Володимир Прокопович
Формула / Реферат
Способ вычисления объема и площади боковой поверхности произвольной выпуклой фигуры, заключающийся в том, что проецируют изображение объекта на преобразователь свет-сигнал, преобразуют полученное изображение в видеосигнал, а при проецировании изображения объекта центрируют изображение объекта путем совмещения центра изображения объекта с центром отсчета в блоке центрирования изображения, измеряют расстояние от центра изображения объекта до контура изображения, поворачивают изображение объекта на заданный угол, отличающийся тем, что преобразуют интенсивности оптических сигналов каждой точки исходного изображения в оптические сигналы, длительность которых пропорциональна интенсивности оптических сигналов исходного изображения, а также от крайних нижних точек фигуры до соответствующего бинарного среза изображения, и преобразованную совокупность оптических сигналов записывают в виде последовательностей бинарных срезов изображения, при периодическом изменении полярности тактовых управляющих сигналов, сдвигают бинарные срезы изображения, измеряют расстояние от центра до контура изображения двух соседних бинарных срезов изображения, проверяют на равенство нулю расстояния от оси вращения до контура изображения, и если хоть одно расстояние равно нулю, то сдвигают бинарные срезы до получения обоих расстояний не равных нулю, вычисляют объем сектора фигуры, ограниченный углом, на который была повернута фигура, а также ограниченный бинарными срезами по формуле
где Ri и Ri+1 - радиусы двух соседних секторов;
h - расстояние между основаниями двух соседних секторов;
N - количество элементарных углов поворота, на которые делят угол, равный 360°, а площади боковых поверхностей вычисляют по формуле
,
накапливают полученные значения объемов и площадей и сдвигают бинарные срезы до того как последнее расстояние от центра до контура не станет равно нулю, поворачивают изображение на элементарный угол и вычисляют объем и площадь боковой поверхности очередного сектора, повороты изображения осуществляют до полного угла, соответствующего углу равному 360°, по сумме объемов и площадей боковых поверхностей всех секторов определяют объем и площадь боковой поверхности всей фигуры.
Текст
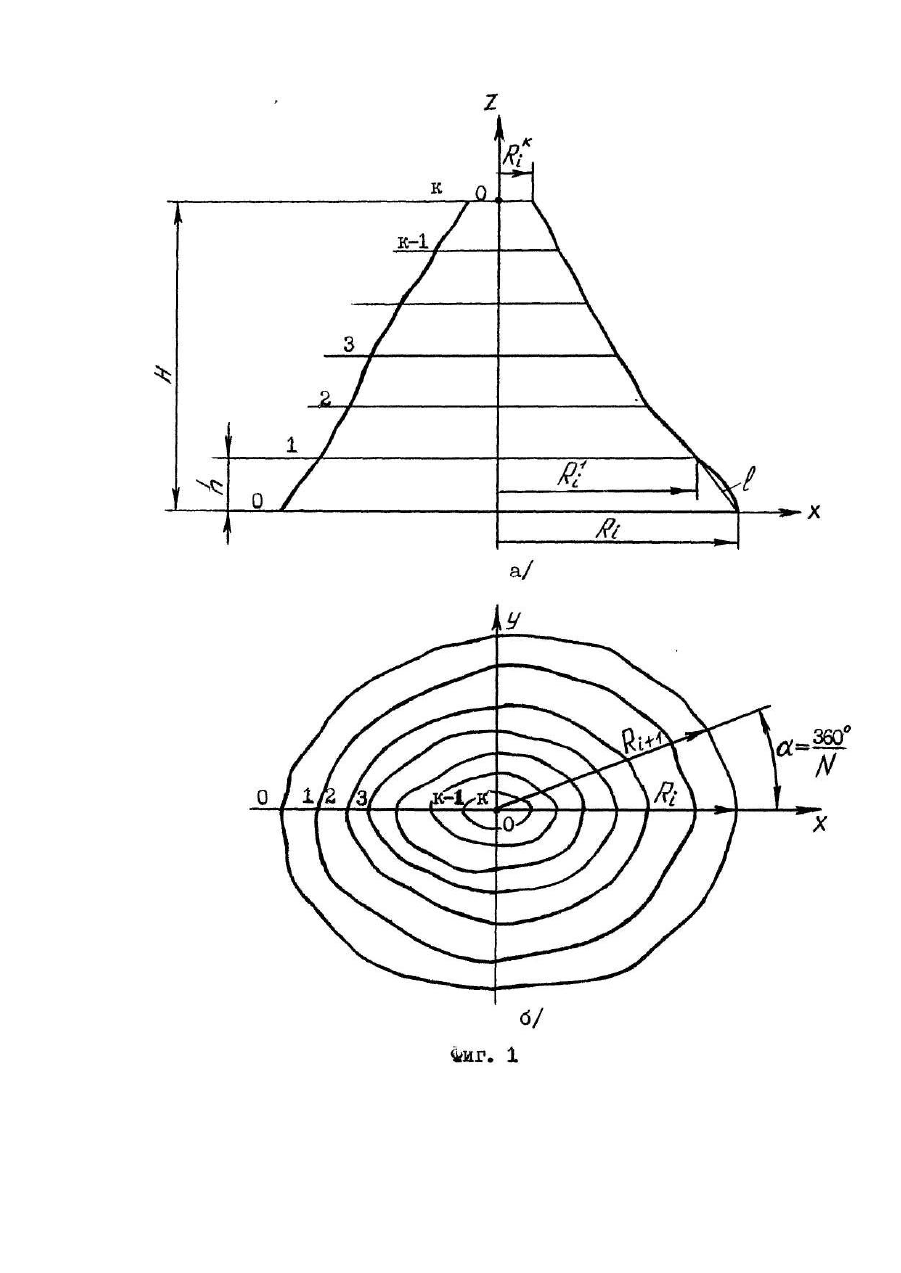
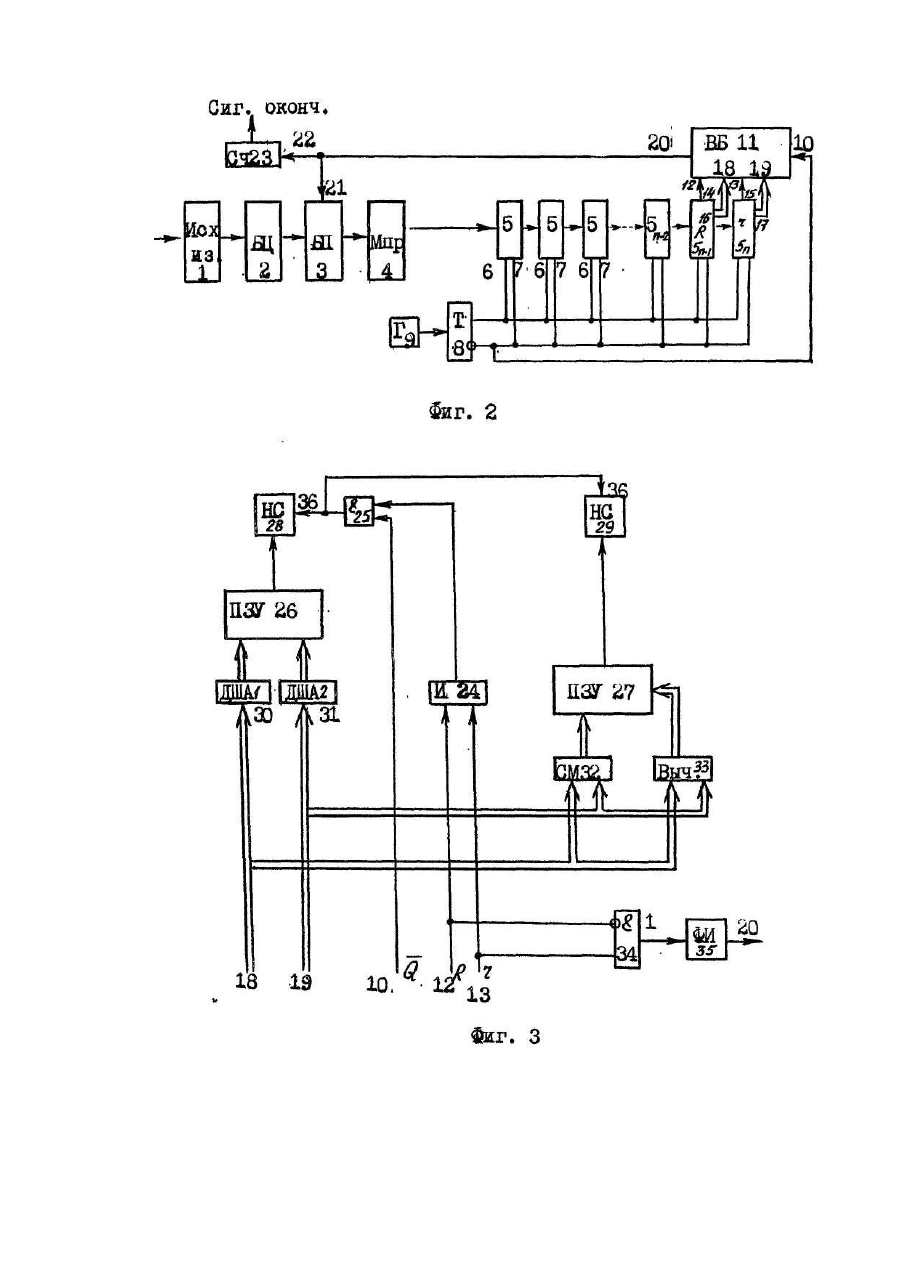
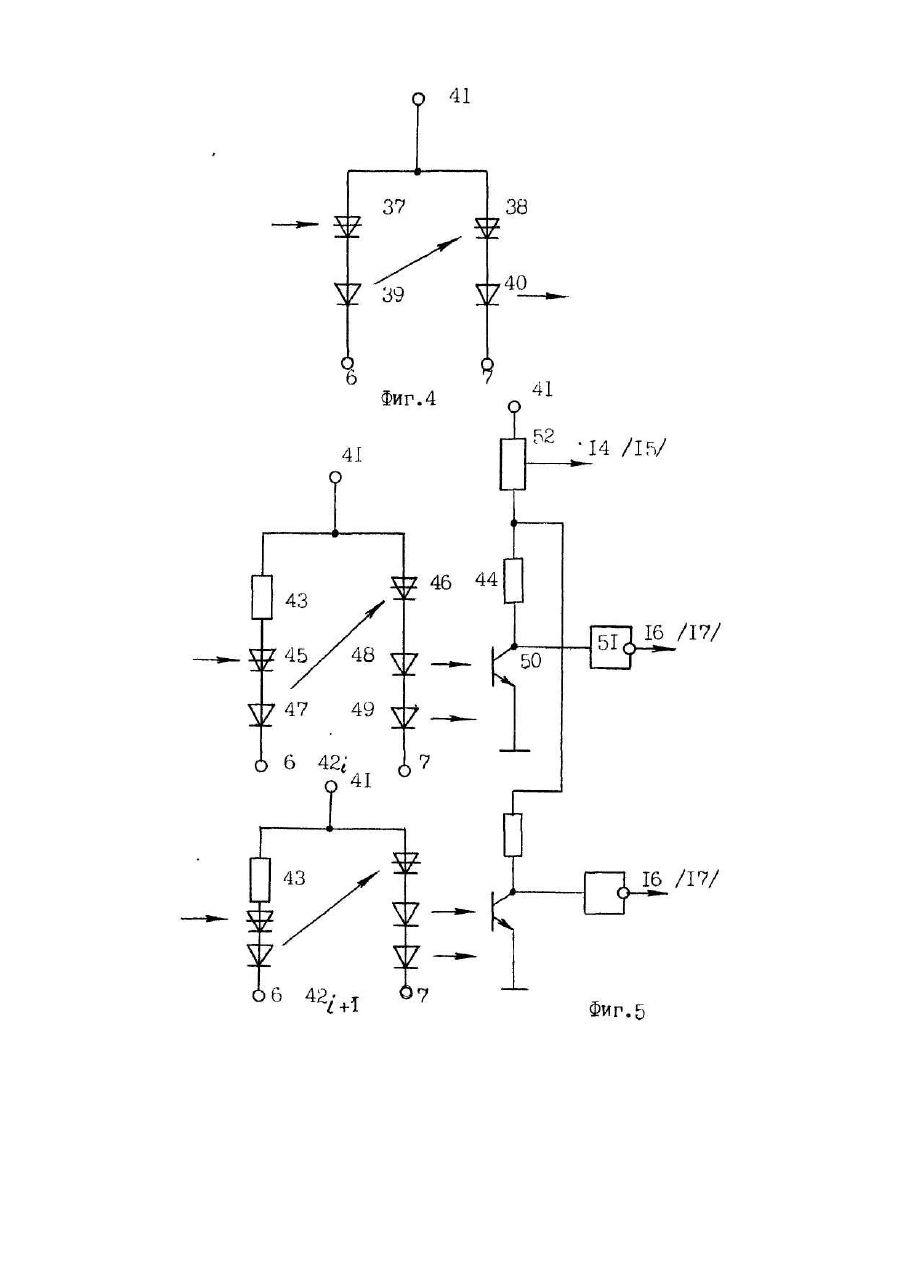
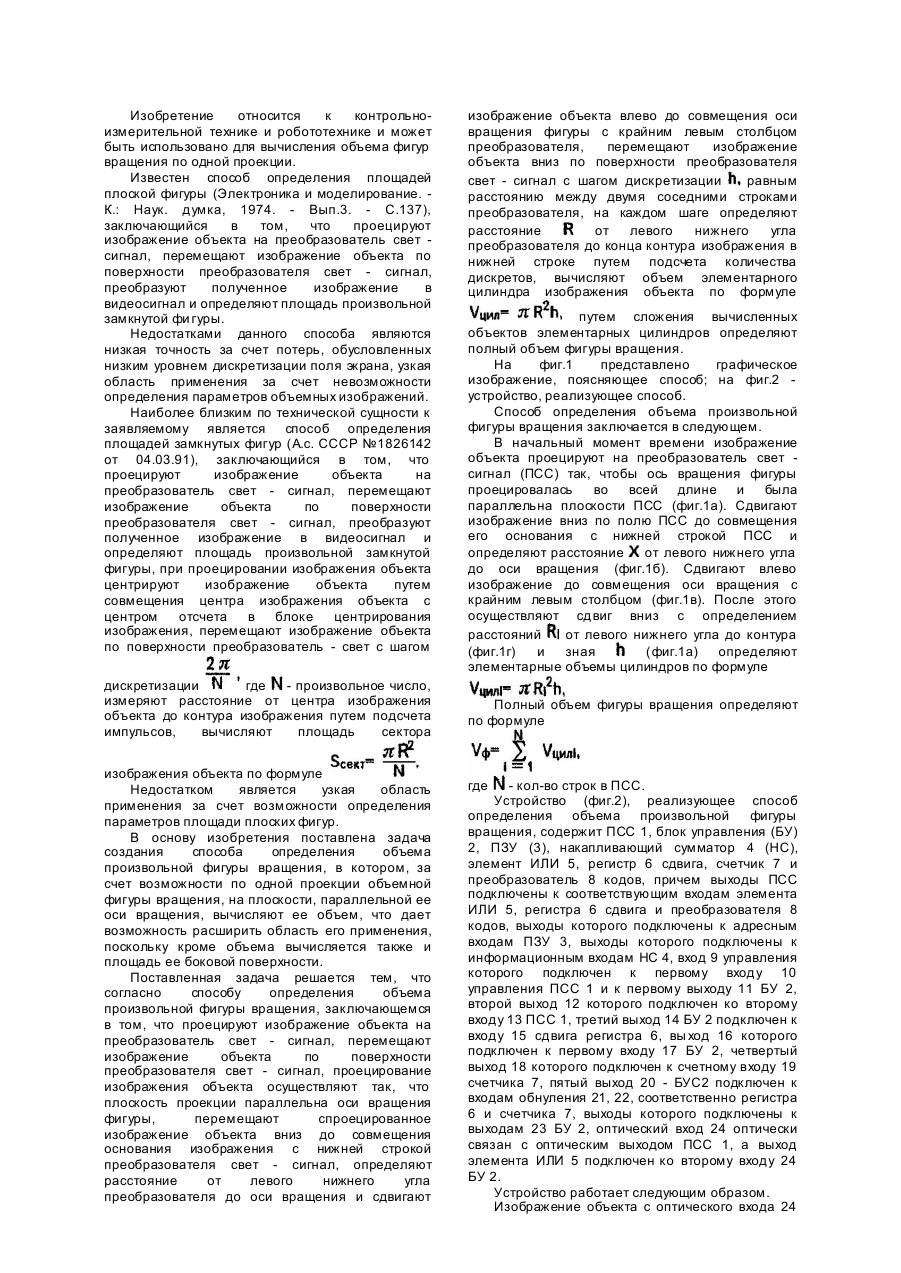
Изобретение относится к контрольно-измерительной технике и робототехнике и может быть использовано для вычисления объема и площади боковой поверхности фигуры. Известен способ определения площади плоской фигуры ("Электроника и моделирование". Киев, "Наукова думка", 1974, вып.3, с.137), заключающийся в том, что проецируют изображение объекта на преобразователь свет-сигнал, перемещают изображение объекта по поверхности преобразователя свет-сигнал, преобразуют полученное изображение в видеосигнал и определяют площадь произвольной замкнутой фигуры. Наиболее близким по технической сущности к заявляемому является способ определения площадей произвольных замкнутых фигур (авт.св. №1826142 от 04.03.91), заключающийся в том, что проецируют изображение объекта на преобразователь свет-сигнал, перемещают изображение объекта по поверхности преобразователя свет-сигнал, преобразуют полученное изображение в видеосигнал и определяют площадь произвольной замкнутой фигуры, при проецировании изображения объекта центрируют изображение объекта путем совмещения центра изображения объекта с центром отсчета в блоке центрирования и изображения, перемещают изображение объекта по поверхности преобразователь-свет с шагом дискретизации 2 p/Ν, где N -произвольное число, измеряют расстояние от центра изображения объекта до контура изображения путем подсчета импульсов, вычисляют площадь сектора изображения объекта по формуле В основу изобретения поставлена задача создания способа вычисления объема и площади боковой поверхности произвольной выпуклой фигуры, в котором за счет представления объемной фигуры в виде полутонового изображения, разбиения его на сектора и усеченные конусы обеспечивается вычисление его объема и площади боковой поверхности объемной фигуры и за счет этого расширяется его область применения, а также устраняется такой существенный недостаток, как использование проекционной обработки. Поставленная задача решается тем, что согласно способу вычисления объема и площади боковой поверхности произвольной выпуклой фигуры, заключающегося в том, что проецируют изображение объекта на преобразователь свет-сигнал, преобразуют полученное изображение в видеосигнал, а при проецировании изображения объекта центрируют изображение объекта путем совмещения центра изображения объекта с центром отсчета в блоке центрирования изображения, измеряют расстояние от центра изображения объекта до контура изображения, поворачивают изображение объекта на заданный угол, отличающийся тем, что преобразуют интенсивности оптических сигналов каждой точки исходного изображения в оптические сигналы, длительность которых пропорциональна интенсивности оптических сигналов исходного изображения, а также от крайних нижних точек фигуры до соответствующего бинарного среза изображения, и преобразованную совокупность оптических сигналов записывают в виде последовательностей бинарных срезов изображения, при периодическом изменении полярности тактовых управляющих сигналов, сдвигают бинарные срезы изображения, измеряют расстояние от центра до контура изображения двух соседних бинарных срезов изображения, проверяют на равенство нулю расстояния от оси вращения до контура изображения, и если хоть одно расстояние равно нулю, то сдвигают бинарные срезы до получения обеих расстояний не равных нулю, вычисляют объем сектора фигуры, ограниченный углом, на котором была повернута фигура, а также ограниченный бинарными срезами по формуле где Ri, Ri+1 - радиусы двух соседних секторов; h - расстояние между основаниями двух соседних секторов; N - количество элементарных углов поворота, на которые делят угол, равный 360°, а площади боковых поверхностей вычисляют по формуле накапливают полученные значения объемов и площадей и сдвигают бинарные срезы до того как последнее расстояние от центра до контура не станет равно нулю, поворачивают изображение на элементарный угол и вычисляют объем и площадь боковой поверхности очередного сектора, повороты изображения осуществляют до полного угла, соответгли ующего углу равному 360°, по сумме объемов и площадей боковых поверхностей всех секторов определяют объем и площадь боковой поверхности всей фигуры. На фиг.1 представлен чертеж выпуклой фигуры в двух проекциях, поясняющий способ; на фиг,2 структурная схема устройства, реализующего способ; на фиг.3 - вариант реализации вычислительного блока; на фиг.4 - принципиальная схема ячейки блока регистрации радиуса; на фиг.5 - функциональнаясхема двух соседних ячеек двух последних блоков регистрации радиусов. Устройство (фиг.2), реализующее способ вычисления объема и площади боковой поверхности произвольной выпуклой фигуры содержит блок 1 формирования исходного изображения, оптически связанный с оптическими входами устройства блока 2 центрирования (ВЦ), оптический выход которого связан с оптическим входом блока 3 поворота, оптический выход которого связан с оптическим входом блока 4 преобразователей, оптический выход которого связан с оптическим. входом первого блока 5 i регистрации радиусов, причем оптический выход каждого предыдущего блока 5i регистрации радиусов оптически связан с оптическим входом соответствующего ему последующего блока 5i+1 регистрации радиусов, первые и вторые электрические входы 6,7 всех блоков 5 регистрации радиусов подключены, соответственно, к прямому и инверсному выходам счетного триггера 8, счетный вход которого подключен к выходу генератора 9, а инверсный выход- к первому входу 10 вычислительного блока 11 (ВБ), второй и третий входы 12, 13 которого подключены, соответственно, к первым электрическим выходам 14,15 предпоследнего и последнего блоков 5n-1, 5n регистрации радиусов, вторые выходы 16, 17 которых подключены, соответственно, к четвертому и пятому входам 18, 19 вычислительного блока 11, выход 20 которого подключен к электрическому входу 21 БПЗ и к входу 22 вычитания вычитающего сче тчика 23. Вычислительный блок (фиг.3) содержит два элемента И24, 25, два-постоянных запоминающих устройства 26, 27 (ПЗУ), два накапливающих сумматора 28, 29 (не), два дешифратора 30,31 адреса (Д Ш А), сумматор 32 (СМ), вычитатель 33, элемент И 34 с инверсией по первому входу и формирователь 35 импульсов, выход которого подключен к выходу 20 В Б, а вход - к выходу элемента И34, инверсный и прямой входы которого подключены, соответственно, ко второму и третьему входам 12, 13 ВБ и к первому и второму входам первого элемента I/I24, вы ход которого подключен к первому входу второго элемента И25, второй вход которого подключен к первому входу 10 ВБ, а выход -к входам 36 управления НС 28, 29, информационные входы которых подключены к выходам соответствующих ПЗУ 26, 27, первый и второй входы первого ПЗУ 26 подключены, соответственно, к выходам первого и второго ДША 30, 31, входы которых подключены, соответственно, к четвертым и пятым входам 18, 19 ВБ, а также первым и вторым входам, соответственносм 32 и вычитателя 33, выходы которых подключены, соответственно, к первому и второму входам второго ПЗУ 27. Ячейка блока регистрации радиусов (фиг.4) содержит два фототиристора 37, 38 и два светодиода-39, 40, катоды которых подключены, соответственно, к первому и второму входам 6, 7, а аноды, соответственно, к катодам первого и второго фототиристоров 37,38, аноды которых подключены к шине 41 положительного полюса источника питания, причем первый светодиод 39 оптически связан со вторым фототиристором 38, оптический вход ячейки есть оптический вход первого фото тиристора 37, а оптический выход ячейки есть оптический выход второго светодиода. Каждая ячейка 42 последнего и предпоследнего блоков регистрации радиусов (фиг.5) содержит два резистора 43, 44, два фототиристора 45,46, три светодиода 47-49, фототранзистор 50 и инвертор 51, выход которого подключен к выходу 16 ячейки 42, а вход - к коллектору фо тотранзистора, эмиттер которого подключен к общей шине, катоды первого и третьего светодиодов 47, 49 подключены, соответственно, к первому и второму выходам 6, 7 блока, анод третьего светодиода 49 подключен к катоду второго светодиода 48, анод которого подключен к катоду второго фототиристора 46, анод первого светодиода 47 подключен к катоду первого фототиристора 45, анод которого, через первый резистор 43, подключен к шине 41 питания и к аноду второго фототиристора 46, оптический вход ячейки 42 оптически связан с первым фототиристором 45, а второй фототиристор 46 оптически связан с первым светодиодом 47, третий светодиод 49 оптически связан с оптическим выходом ячейки 42, второй светодиод 48 оптически связан с фототранзистором 50, коллекторы всех фототранзисторов 50 блока, через второй резистор 44, подключены к первому входу преобразователя ток-код 52 (ПТК), второй вход которого подключен к шине 41 питания. Суть способа вычисления объема и площади боковой поверхности заключается в следующем. В начальный момент времени проецируют изображение объекта на (фиг. 16, вид сверху) преобразователь свет-сигнал. Причем каждая точка изображения объекта светится с яркостью, соответствующей удаленности данной точки, лежащей на поверхности объекта, от основания фигуры. Если первая точка удалена от основания на расстояние 2h (фиг. 1а), а вторая - на расстояние h, то их интенсивности выражены следующим образом: I1 = 2І2, где I1 -интенсивность свечения первой точки экрана преобразователя, І2 - интенсивность свечения второй точки. Изображение выпуклой фигуры центрируют так, чтобы ось вращения проходила через ее вершину 0. После чего, поворачивают фигур у относительно вершины 0 на угол a= 360°/Ν. Определяют расстояние от вершины до нулевого уровня (основания фигуры), т.е. до точек с интенсивностями Ιο, имеющими наименьшую интенсивность свечения и радиусы Ri и Ri+1, задающие угол a (фиг. 16). Поверхность фигуры разбивают на К поверхностей уровня, а каждый уровень разбит на К дискретных секторов, при этом определяют радиусы Ro, Ri.....R k оснований секторов. Каждый такой дискретный сектор выпуклой фигуры рассматривается как сектор усеченного конуса. Объем дискретного сектора вычисляют по формуле Суммарный объем секторов выпуклой фигуры, ограниченных углом a определяют Площадь боковой кривой поверхности дискретного усеченного конуса вычисляют по формуле Суммарную площадь боковой поверхности сектора выпуклой фигуры, ограниченного углом a, определяют по формуле После этого поворачивают изображение на угол a и повторяют алгоритм вычисления объема и площади боковой поверхности очередного сектора выпуклой фигуры. Повороты осуществляют до тех пор, пока сумма дискретных углов а составит 30°. Объемы и площади боковых поверхностей секторов суммируют и определяют полные объем и площадь выпуклой фигуры. Устройство, реализующее способ функционирует следующим образом (фиг.2). Изображение объекта формируется блоком 1 формирования исходного изображения и представляется видом сверху (фиг. 1б), причем каждая ячейка блока 1, представляющая собой точку изображения, которая светится с интенсивностью, соответствующей удалению ее от основания фигуры. Чем дальше удалена точка на поверхности от основания, тем больше интенсивность свечения соответствующей ячейки блока 1. Полутоновое изображение от блока 1 поступает на БЦ2, в котором оно центрируется, т.е. центр вершины изображения совмещается с центром выходной апертуры БЦ2. Изображение с выхода БЦ2 поступает на БПЗ, в котором оно поворачивается, относительно центра, на заданный угол a =360°/N, а в счетчик 23 записывается код числа N. Из БПЗ повернутое изображение поступает на блок 4 преобразователей, который выполнен в виде линейки преобразователей. Первый разряд линейки совмещен с центром блока 3 преобразователей, а последний с крайней ячейкой БПЗ. Каждый преобразователъ блока 4 преобразует интенсивность оптического сигнала на входе в длительность оптического сигнала, причем длительность прямо пропорциональна интенсивности оптического сигнала на входе. Оптические сигналы с соответствующими длительностями поступают на оптические входы первого блока 5ι регистрации радиусов, который выполнен в виде линейки оптоэлектронных ячеек с оптическим входом и выходом, каждая из которых совпадает с соответствующим преобразователем блока 4. Электрические входы 6, 7 каждой ячейки (фиг.4) объединяются в общие два входа 6, 7 блока 5. Генератор 9 генерирует прямоугольные импульсы, поступающие на счетный вход счетного триггера 8. С приходом очередного импульса триггер С меняет свое состояние на противоположное. Каждая ячейка блока 5 представляет собой двухплечевую структур у, каждое плечо которой (фиг.4) содержит фототиристор 37 (38) и светодиод 39 (40). В момент, когда на прямом выходе триггера 8 присутствует н улевой потенциал, поступающий на входы 6 блоков 5, а на оптических входах первого блока 5 (фиг.2) присутствуют соответствующие длительности оптических сигналов, происходит возбуждение первого плеча ячеек, на оптических входа х которых присутствуют оптические сигналы. С приходом очередного импульса, триггер 8 меняет свое состояние на противоположное, т.е. на инверсном выходе появляется нулевой потенциал, поступающий на вторые входы 7 блоков 5, а на первых присутствует единичный потенциал от прямого выхода триггера 8. Соответственно возбуждается второе и обнуляется первое плечи ячеек (фиг.4). На оптических выходах первого блока 5i регистрации радиусов присутствует оптический сигнал, поступающий на оптические входы второго блока 52. Причем, в возбужденном состоянии будут те ячейки первого блока 5і на входах которых присутствуют сигналы с длительностью Τi ³2t., где t - период следования импульсов генератора. С приходом третьего и четвертого импульсов возбуждаются те ячейки второго блока 52, которым соответствуют длительности Τi ³4t. Если же длительность Ті меньше, то на следующем пятом такте запись в соответствующие ячейки первого блока 5ι прекращается, т.е. они не возбуждаются. Таким образом, если длительность на входе блока 5ι равна Тк то будут возбуждены соответствующие ячейки в к блоках 5i...5κ, т.е. в к-ом блоке будет записан бинарный срез изображения соответствующий точкам, находящимся на расстоянии к*h (фиг. 1а) от основания. По окончании оптических длительностей на выходе блока 4, триггер 8 продолжает переключаться и записанные бинарные срезы в блоках 8 последовательно сдвигаются в сторону старши х. Если на выходах 14, 15 двух последних блоков 5n-1,5n присутствуют нуле вые потенциалы, поступающие на второй и третий входы 12, 13 ВБ 11, то это значит, что в двух последних блоках 5n-1 , 5n не присутствуют бинарные срезы, а ВБ 11 вычислений не производит. Наличие единичного потенциала на выходе 14 или 15 означает присутствие возбужденных ячеек в блоках 5n-1 или 5n. В случае присутствия на вы ходе 15 последнего блока 5n нулевого потенциала, а на выходе 14 предпоследнего блока 5n-1 - единичный потенциал, ВБ 11 не производит вычисления. Если же появляются единичные потенциалы на выходах 14, 15, то ВБ 11 начинает производить вычисления соответствующих объемов и площадей. При этом, в последнем блоке 5n присутствует радиус R k верхнего основания фигуры, код которого с выхода 17 поступает на пятый вход 19 ВБ 11, на четвертый вход 18 которого, в этот момент, с выхода 16 предпоследнего блока 5п-1 поступает код радиуса Rk-1 к-1-го среза изображения. По формулам (1) и (3) ВБ 11 вычисляет соответствующие величины объема и площади боковой поверхности, зная радиус, и накапливает соответствующие результаты. Такие вычисления производятся до тех пор, пока на выходе 14 предпоследнего блока 5η-ι не появится нулевой потенциал, а на выходе 15 все еще присутствует единичный потенциал. В этот момент на выходе 20 В Б 11 появляться импульс, поступающий на входы 21 БПЗ и 22 счетчика 23. Содержимое счетчика 23 уменьшается на единицу, БПЗ поворачивает изображение на угол а, а ВБ 11 вычислений не производит. После очередного поворота изображения на угол а БПЗ, блок 4 преобразователей формирует соответствующие длительности, и производится разбиение фрагмента изображения по бинарным срезам в блоках 5. После этого, вычисляют соответствующие объемы и площади боковых поверхностей по алгоритму, описанному ранее. Поворот изображения продолжается до тех пор, пока содержимое счетчика 23 не станет равно 0. В этом случае дальнейшая работа устройства прекращается. ВБ 11 (фиг.3) функционирует следующим образом. Коды Ri и Ri+1 поступают, соответственно, на входы первого и второго дешифраторов 30,31, на выходах которых формируется адрес ячейки первого ПЗУ 26, в которой находится результат вычисления объема по формуле (1) по определению значения радиусов, т.о. коды радиусов указывают на ячейку первого ПЗУ 26, в которой находится результат по формуле (1) при подставке в нее данных значений Ri и Ri+1, С выхода ПЗУ 26 код результата поступает на информационный вход первого НС 28, который накапливает результат тогда, когда на его входе 36 управления присутствует единичный потенциал, поступающий с вы хода второго элемента И25. Если на втором и третьем входах 12, 13 присутствуют единичные потенциалы, то на выходе первого элемента И24 появляется единичный потенциал, поступающий на второй вход второго элемента И25, на выходе которого появляется единичный потенциал тогда, когда на его первый вход поступает единичный потенциал с первого входа 10 блока. Сумматор 32 и вычитатель 33, соответственно, складывают и вычитают значения радиусов и формируют адрес ячейки второго ПЗУ 27, в которой содержится значение результата вычисленного по формуле (3) для значения площади боковой поверхности. Код результата поступает с вы хода второго ПЗУ 27 на информационный вход второго НС 29, который накапливает соответствующее значение в момент поступления на его вход 36 управления единичного потенциала с выхода второго элемента И25. В случае, когда на втором входе 12 присутствует н улевой потенциал, а на третьем входе 13 - единичный потенциал, на выходе элемента И34 появляется единичный потенциал, поступающий на вход ФИ 35, который, в этот момент, формирует единичный импульс, поступающий на вы ход 20. Ячейка блока 5 регистрации радиусов (фиг.4)функционирует следующим образом. Если на первом входе 6 присутствует н улевой потенциал, а на первом фототиристоре 37 - оптический сигнал, то ток протекает через первый фототиристор 37, переходящий в проводящее состояние, первый светодиод 39, который излучает свет на второй фототиристор 38, к первому входу 6. При поступлении нулевого потенциала на второй вход 7 и единичного потенциала на первый вход 6, вторые фототиристор 38 и светодиод 40 включаются, а первые фототиристор 37 и светодиод 39 запираются. Это происходит за счет оптической связи между первым светодиодом и вторым фототиристором 38. Блоки 5n-1 и 5n (фиг.5) регистрации радиусов санкционируют следующим образом. Структура, содержащая фототиристоры 45, 46 и светодиоды 47-49, функционирует аналогично структуре, представленной на фиг.4. В случае протекания тока через второй фототиристор 46, второй и третий светодиоды 48, 49 в ячейке, свет от второго светодиода 48 поступает на оптический вход фототранзистора 50, который переходит в проводящее состояние. Ток протекает от шины 41 питания, через ПТК 52, резистор 44, переход коллектор-эмиттер фототранзистора 50 к общей шине. Если через ПТК 52 протекает ток, который больше, либо равен току потребления фототранзистором 50 ячейки, ограниченный резистором 44, то на его выходе появляется единичный сигнал, поступающий на выход 14(15). Резистор 43 предназначен для ограничения тока в первом плече ячейки. Инвертор 51 инвертирует сигнал с коллектора фототранзистора 50 и подает его на выход 16 (17) ячейки. Способ позволяет вычислять объем произвольной выпуклой фигуры, а также площадь боковой поверхности.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of calculation of volume and lateral surface plane of random convex figure
Автори англійськоюKozhemyako Volodymyr Prokopovych, Kormanovskyi Serhii Ivanovych, Bilan Stepan Mykolaiovych
Назва патенту російськоюСпособ вычисления объема и плоскости боковой поверхности произвольной выпуклой фигуры
Автори російськоюКожемяко Владимир Прокофьевич, Кормановский Сергей Иванович, Билан Степан Николаевич
МПК / Мітки
МПК: H04N 7/18
Мітки: поверхні, об'єму, площі, бічної, опуклої, довільно, обчислення, спосіб, фігури
Код посилання
<a href="https://ua.patents.su/7-18148-sposib-obchislennya-obehmu-i-ploshhi-bichno-poverkhni-dovilno-opuklo-figuri.html" target="_blank" rel="follow" title="База патентів України">Спосіб обчислення об’єму і площі бічної поверхні довільної опуклої фігури</a>
Спосіб визначення об’єму довільної фігури обертання
Номер патенту: 17148
Опубліковано: 18.03.1997
Автори: Кожем'яко Володимир Прокопович, Білан Степан Миколайович, Кормановський Сергій Іванович
МПК: H04N 7/18
Мітки: довільно, спосіб, визначення, об'єму, обертання, фігури
Формула / Реферат:
Способ определения объема произвольной фигуры вращения, заключающийся в том, что проецируют изображение объекта на преобразователь свет - сигнал, перемещают изображение объекта по поверхности преобразователя свет - сигнал, отличающийся тем, что проецирование изображения объекта осуществляют так, что плоскость проекции параллельна оси вращения фигуры, перемещают спроецированное изображение объекта вниз до совмещения основания изображения с...
Пристрій для вимірювання площі контактуючої поверхні зубів
Номер патенту: 10693
Опубліковано: 25.12.1996
Автор: Зубкова Людмила Петрівна
МПК: A61B 5/053
Мітки: вимірювання, зубів, контактуючої, поверхні, пристрій, площі
Формула / Реферат:
Устройство для измерения площади контактирующей поверхности зубов, содержащее датчик площади контактирующей поверхности зубов, который подключен к измерителю представляющему собой мультивибратор с подстроенным элементом, в одном из плеч которого включена емкость датчика, а выход мультивибратора через интегральную цепь и детектор подключен к стрелочному индикатору.
Багатоканальний сигнатурний аналізатор

Номер патенту: 6922
Опубліковано: 31.03.1995
Автори: Журавель Олександр Павлович, Дяченко Олег Миколайович
МПК: G06F 11/00
Мітки: сигнатурний, аналізатор, багатоканальний
Текст:
...о е д и н е н с п р я м ы м выходом последнего разряда первого счетчика, инверсный выход последнего разряда которого соединен со вторым входом элемента ИЛИ и с тактовым входом первого триггера, инверсный выход которого соединен с первым выходом третьего элемента И, второй вход которого соединен с выходом элемента ИЛИ, выход третьего элемента И соединен с тактовым входом второго триггера, вторым входом первого элемента И и входом элемента...
Cпосіб дистанційного виявлення вібрацій поверхні об’єкту
Номер патенту: 1482
Опубліковано: 25.07.1994
Автор: Сафронов Григорій Степанович
Мітки: дистанційного, поверхні, cпосіб, вібрацій, виявлення, об'єкту
Формула / Реферат:
Способ дистанционного обнаружения вибраций поверхности объекта, заключающийся в том, что поток когерентного излучения делят на опорный и измерительный световые потоки, направляют измерительный поток на контролируемый объект, осуществляют взаимодействие отраженного объекта измерительного светового потока и опорного светового потока, по результатам которого судят о наличии вибрации, отличающийся тем, что опорный световой поток делят на два...
Система телемеханіки
Номер патенту: 7702
Опубліковано: 26.12.1995
Автори: Сидяк Володимир Олександрович, Лагунович Євген Федорович, Верховський Яків Маркович, Прошин Володимир Володимирович
МПК: G08C 19/28
Мітки: система, телемеханіки
Формула / Реферат:
Система телемеханики, содержащая на пункте управления генератор импульсов, первый и второй распределители импульсов, первый и второй формирователи импульсов, первый выход первого распределителя подключен к входу второго распределителя и к первому входу первого формирователя импульсов, первый и второй выходы последнего соединены соответственно с первой и второй шинами линии связи, последний выход второго распределителя подключен к...
Попередній патент: Різальний інструмент для обробки волокнистих матеріалів
Наступний патент: Лопата
Випадковий патент: Ремонтно-механічна майстерня та ремонтний центр