Спосіб визначення об’єму довільної фігури обертання
Номер патенту: 17148
Опубліковано: 18.03.1997
Автори: Кожем'яко Володимир Прокопович, Білан Степан Миколайович, Кормановський Сергій Іванович
Формула / Реферат
Способ определения объема произвольной фигуры вращения, заключающийся в том, что проецируют изображение объекта на преобразователь свет - сигнал, перемещают изображение объекта по поверхности преобразователя свет - сигнал, отличающийся тем, что проецирование изображения объекта осуществляют так, что плоскость проекции параллельна оси вращения фигуры, перемещают спроецированное изображение объекта вниз до совмещения основания изображения с нижней строкой преобразователя свет-сигнал, определяют расстояние от левого нижнего угла преобразователя до оси вращения и сдвигают изображение объекта влево до совмещения оси вращения фигуры с крайним левым столбцом преобразователя, перемещают изображение объекта вниз по поверхности преобразователя свет - сигнал с шагом дискретизации, равным расстоянию между двумя соседними строками преобразователя, на каждом шаге определяют расстояние от левого нижнего угла преобразователя до конца контура изображения в нижней строке путем подсчета количества дискретов, вычисляют объем элементарного цилиндра изображения объекта по формуле где - шаг дискретизации, - расстояние от левого нижнего угла преобразователя до конца контура изображения, затем путем сложения вычисленных объемов элементарных цилиндров определяют полный объем фигуры вращения.
Текст
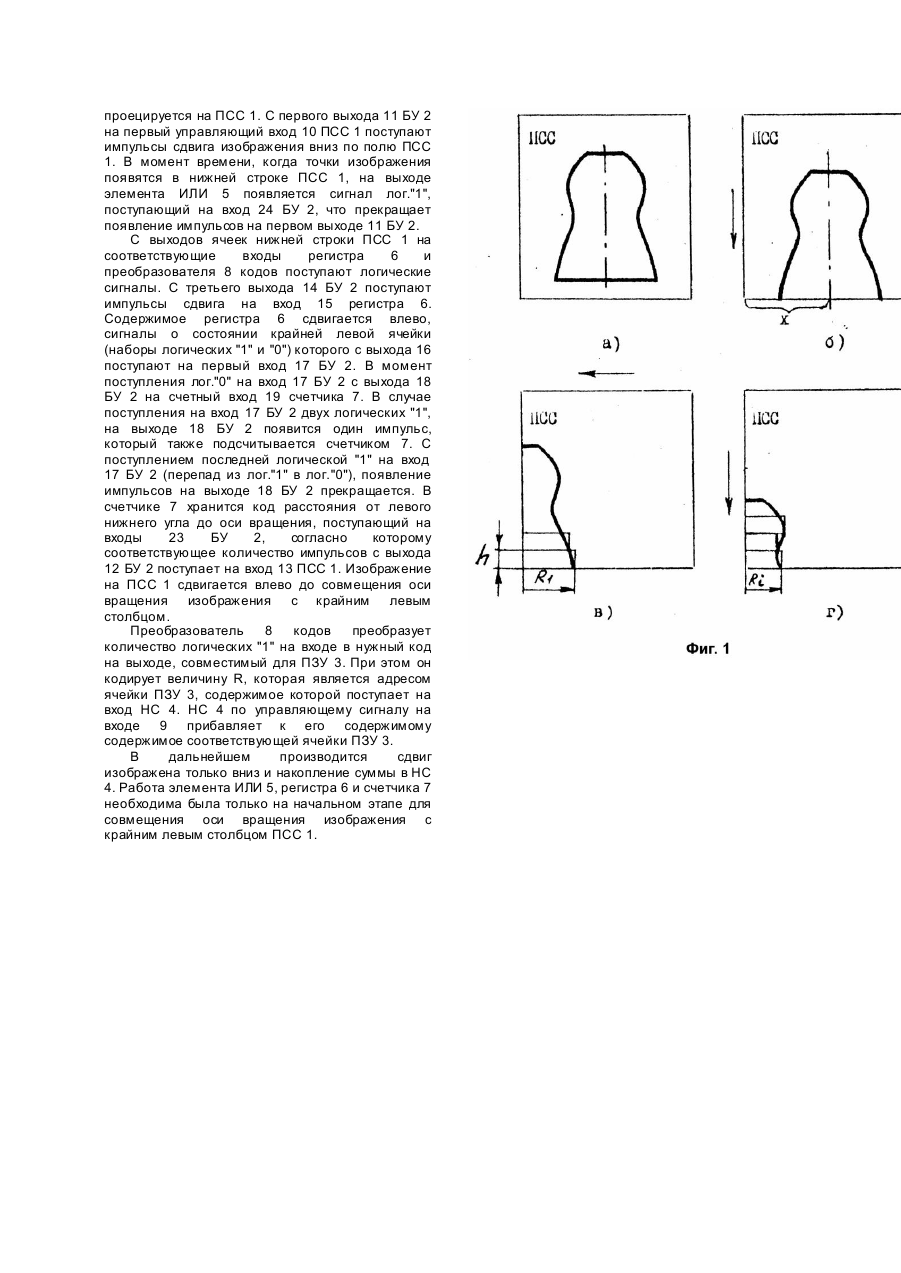
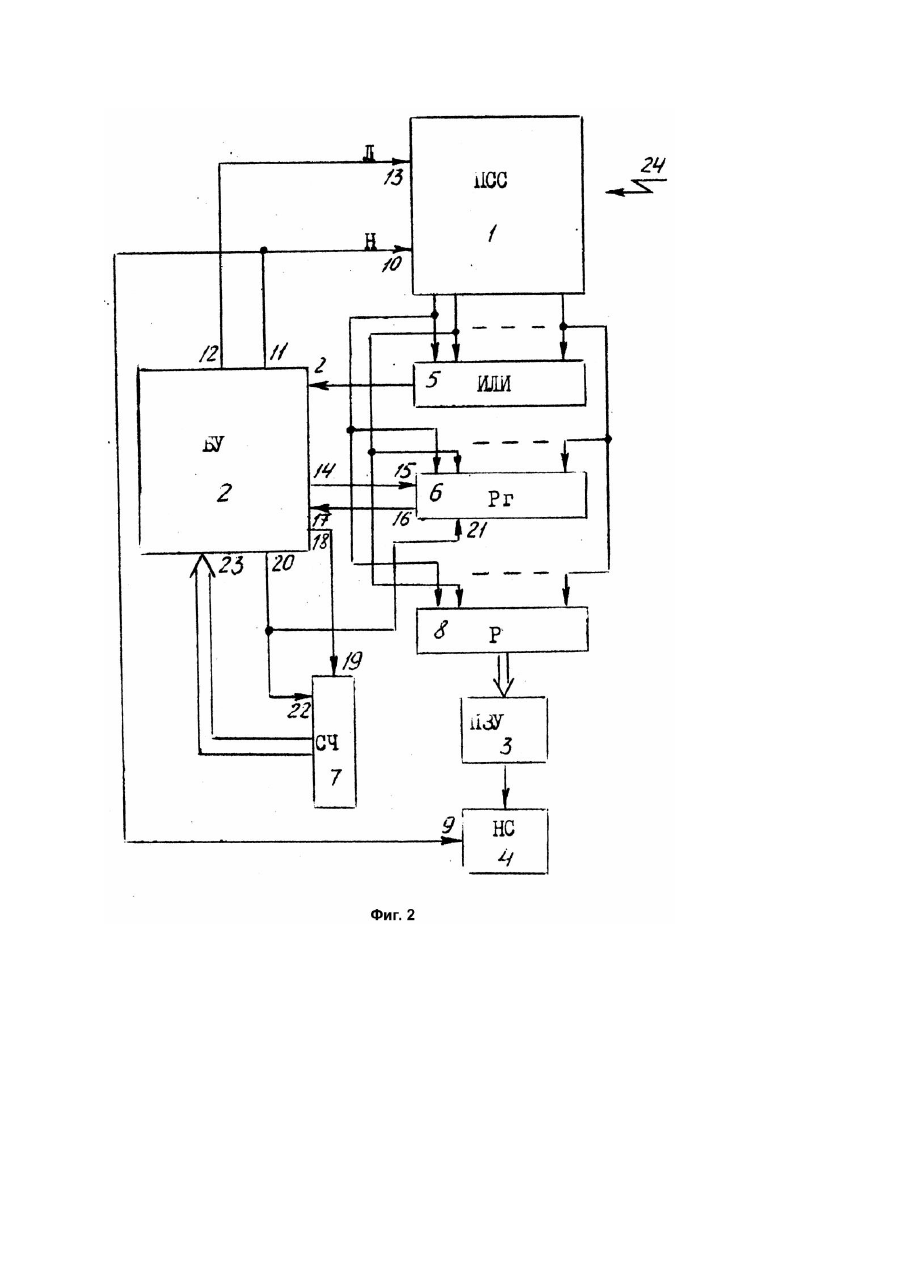
Изобретение относится к контрольноизмерительной технике и робототехнике и может быть использовано для вычисления объема фигур вращения по одной проекции. Известен способ определения площадей плоской фигуры (Электроника и моделирование. К.: Наук. думка, 1974. - Вып.3. - С.137), заключающийся в том, что проецируют изображение объекта на преобразователь свет сигнал, перемещают изображение объекта по поверхности преобразователя свет - сигнал, преобразуют полученное изображение в видеосигнал и определяют площадь произвольной замкнутой фи гуры. Недостатками данного способа являются низкая точность за счет потерь, обусловленных низким уровнем дискретизации поля экрана, узкая область применения за счет невозможности определения параметров объемных изображений. Наиболее близким по технической сущности к заявляемому является способ определения площадей замкнутых фигур (А.с. СССР №1826142 от 04.03.91), заключающийся в том, что проецируют изображение объекта на преобразователь свет - сигнал, перемещают изображение объекта по поверхности преобразователя свет - сигнал, преобразуют полученное изображение в видеосигнал и определяют площадь произвольной замкнутой фигуры, при проецировании изображения объекта центрируют изображение объекта путем совмещения центра изображения объекта с центром отсчета в блоке центрирования изображения, перемещают изображение объекта по поверхности преобразователь - свет с шагом дискретизации где - произвольное число, измеряют расстояние от центра изображения объекта до контура изображения путем подсчета импульсов, вычисляют площадь сектора изображения объекта по формуле Недостатком является узкая область применения за счет возможности определения параметров площади плоских фигур. В основу изобретения поставлена задача создания способа определения объема произвольной фигуры вращения, в котором, за счет возможности по одной проекции объемной фигуры вращения, на плоскости, параллельной ее оси вращения, вычисляют ее объем, что дает возможность расширить область его применения, поскольку кроме объема вычисляется также и площадь ее боковой поверхности. Поставленная задача решается тем, что согласно способу определения объема произвольной фигуры вращения, заключающемся в том, что проецируют изображение объекта на преобразователь свет - сигнал, перемещают изображение объекта по поверхности преобразователя свет - сигнал, проецирование изображения объекта осуществляют так, что плоскость проекции параллельна оси вращения фигуры, перемещают спроецированное изображение объекта вниз до совмещения основания изображения с нижней строкой преобразователя свет - сигнал, определяют расстояние от левого нижнего угла преобразователя до оси вращения и сдвигают изображение объекта влево до совмещения оси вращения фигуры с крайним левым столбцом преобразователя, перемещают изображение объекта вниз по поверхности преобразователя свет - сигнал с шагом дискретизации равным расстоянию между двумя соседними строками преобразователя, на каждом шаге определяют расстояние от левого нижнего угла преобразователя до конца контура изображения в нижней строке путем подсчета количества дискретов, вычисляют объем элементарного цилиндра изображения объекта по формуле путем сложения вычисленных объектов элементарных цилиндров определяют полный объем фигуры вращения. На фиг.1 представлено графическое изображение, поясняющее способ; на фиг.2 устройство, реализующее способ. Способ определения объема произвольной фигуры вращения заключается в следующем. В начальный момент времени изображение объекта проецируют на преобразователь свет сигнал (ПСС) так, чтобы ось вращения фигуры проецировалась во всей длине и была параллельна плоскости ПСС (фиг.1а). Сдвигают изображение вниз по полю ПСС до совмещения его основания с нижней строкой ПСС и определяют расстояние от левого нижнего угла до оси вращения (фиг.1б). Сдвигают влево изображение до совмещения оси вращения с крайним левым столбцом (фиг.1в). После этого осуществляют сдвиг вниз с определением расстояний от левого нижнего угла до контура (фиг.1г) и зная (фиг.1а) определяют элементарные объемы цилиндров по формуле Полный объем фигуры вращения определяют по формуле где - кол-во строк в ПСС. Устройство (фиг.2), реализующее способ определения объема произвольной фигуры вращения, содержит ПСС 1, блок управления (БУ) 2, ПЗУ (3), накапливающий сумматор 4 (НС), элемент ИЛИ 5, регистр 6 сдвига, счетчик 7 и преобразователь 8 кодов, причем выходы ПСС подключены к соответствующим входам элемента ИЛИ 5, регистра 6 сдвига и преобразователя 8 кодов, выходы которого подключены к адресным входам ПЗУ 3, выходы которого подключены к информационным входам НС 4, вход 9 управления которого подключен к первому входу 10 управления ПСС 1 и к первому выходу 11 БУ 2, второй выход 12 которого подключен ко второму входу 13 ПСС 1, третий выход 14 БУ 2 подключен к входу 15 сдвига регистра 6, вы ход 16 которого подключен к первому входу 17 БУ 2, четвертый выход 18 которого подключен к счетному входу 19 счетчика 7, пятый выход 20 - БУС2 подключен к входам обнуления 21, 22, соответственно регистра 6 и счетчика 7, выходы которого подключены к выходам 23 БУ 2, оптический вход 24 оптически связан с оптическим выходом ПСС 1, а выход элемента ИЛИ 5 подключен ко второму входу 24 БУ 2. Устройство работает следующим образом. Изображение объекта с оптического входа 24 проецируется на ПСС 1. С первого выхода 11 БУ 2 на первый управляющий вход 10 ПСС 1 поступают импульсы сдвига изображения вниз по полю ПСС 1. В момент времени, когда точки изображения появятся в нижней строке ПСС 1, на выходе элемента ИЛИ 5 появляется сигнал лог."1", поступающий на вход 24 БУ 2, что прекращает появление импульсов на первом выходе 11 БУ 2. С выходов ячеек нижней строки ПСС 1 на соответствующие входы регистра 6 и преобразователя 8 кодов поступают логические сигналы. С третьего выхода 14 БУ 2 поступают импульсы сдвига на вход 15 регистра 6. Содержимое регистра 6 сдвигается влево, сигналы о состоянии крайней левой ячейки (наборы логических "1" и "0") которого с выхода 16 поступают на первый вход 17 БУ 2. В момент поступления лог."0" на вход 17 БУ 2 с выхода 18 БУ 2 на счетный вход 19 счетчика 7. В случае поступления на вход 17 БУ 2 двух логических "1", на выходе 18 БУ 2 появится один импульс, который также подсчитывается счетчиком 7. С поступлением последней логической "1" на вход 17 БУ 2 (перепад из лог."1" в лог."0"), появление импульсов на выходе 18 БУ 2 прекращается. В счетчике 7 хранится код расстояния от левого нижнего угла до оси вращения, поступающий на входы 23 БУ 2, согласно которому соответствующее количество импульсов с выхода 12 БУ 2 поступает на вход 13 ПСС 1. Изображение на ПСС 1 сдвигается влево до совмещения оси вращения изображения с крайним левым столбцом. Преобразователь 8 кодов преобразует количество логических "1" на входе в нужный код на выходе, совместимый для ПЗУ 3. При этом он кодирует величину R, которая является адресом ячейки ПЗУ 3, содержимое которой поступает на вход НС 4. НС 4 по управляющему сигналу на входе 9 прибавляет к его содержимому содержимое соответствующей ячейки ПЗУ 3. В дальнейшем производится сдвиг изображена только вниз и накопление суммы в НС 4. Работа элемента ИЛИ 5, регистра 6 и счетчика 7 необходима была только на начальном этапе для совмещения оси вращения изображения с крайним левым столбцом ПСС 1.
ДивитисяДодаткова інформація
Назва патенту англійськоюDetermination method for volumes of rotation brushed shape object
Автори англійськоюKozhemyako Volodymyr Prokopovych, Kormanovskyi Serhii Ivanovych, Bilan Stepan Mykolaiovych
Назва патенту російськоюСпособ определения объема произвольной фигуры вращения
Автори російськоюКожемяко Владимир Прокофьевич, Кормановский Сергей Иванович, Билан Степан Николаевич
МПК / Мітки
МПК: H04N 7/18
Мітки: фігури, об'єму, спосіб, обертання, довільно, визначення
Код посилання
<a href="https://ua.patents.su/3-17148-sposib-viznachennya-obehmu-dovilno-figuri-obertannya.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення об’єму довільної фігури обертання</a>
Спосіб визначення окремих значень амплітудно-фазової частотної характеристики всережимного відцентрового регулятора частоти обертання колінчатого вала тракторного дизельного двигуна
Номер патенту: 33
Опубліковано: 30.04.1993
Автор: Музичук Федір Максимович
МПК: F02D 1/08
Мітки: тракторного, амплітудно-фазової, частотної, регулятора, визначення, відцентрового, значень, характеристики, обертання, двигуна, дизельного, спосіб, всережимного, вала, частоти, колінчатого, окремих
Формула / Реферат:
Формула изобретенияСпособ определения частных значений амплитудно-фазовой частотной характеристики всережимного центробежного регулятора частоты вращения коленчатого вала тракторного дизельного двигателя, характеризующийся тем, что задают частоту вращения валика регулятора, соединяют рычаг управления регулятора с имитатором гармонических колебаний и регистрируют колебания рычага управления и позирующего органа топливного насоса,...
Інтерференційний спосіб визначення геометричних розмірів об’єктів
Номер патенту: 8603
Опубліковано: 30.09.1996
Автор: Гафанович Георгій Якович
МПК: G01B 11/00, G01B 11/16
Мітки: інтерференційний, об'єктів, спосіб, розмірів, визначення, геометричних
Формула / Реферат:
1. Интерференционный способ определения геометрических размеров объектов, заключающийся в том, что объект помещают в рабочее плечо интерферометра, направляют в интерферометр монохроматический свет и по количеству полуволн света, укладывающихся в размеры объекта, определяют его размеры, отличающийся тем, что, с целью обеспечения определения размеров прозрачных, объектов, дополнительно направляют в интерферометр белый свет, объект перемещают...
Спосіб візуального визначення колірної характеристики об’єктів
Номер патенту: 13243
Опубліковано: 28.02.1997
Автор: Старощук Борис Олексійович
МПК: G01J 3/46
Мітки: спосіб, визначення, об'єктів, характеристики, візуального, колірної
Формула / Реферат:
Способ визуального определения цветовой характеристики объектов, заключающийся в том, что в поле зрения наблюдателя формируют изображения элементов исследуемого объекта и эталона черного цвета и сравнивают цвета элементов изображений, отличающийся тем, что изображение объекта формируют с помощью цилиндрической линзы, а изображение эталона черного цвета формируют по краям поля зрения наблюдателя.
Пристрій для стабілізації швидкості обертання ведучого вала стрічкопротяжного механізму магнітофона

Номер патенту: 11689
Опубліковано: 25.12.1996
Автор: Юрасов Віктор Семенович
МПК: G11B 15/43
Мітки: обертання, стрічкопротяжного, стабілізації, ведучого, пристрій, швидкості, магнітофона, вала, механізму
Формула / Реферат:
Устройство для стабилизации частоты вращения ведущего вала лентопротяжного механизма магнитофона, содержащее источник питания и последовательно соединенные частотный дискриминатор, усилитель-преобразователь, усилитель мощности и электродвигатель, ротор которого кинематически связан с ведущим валом и измерителем частоты вращения, отличающееся тем, что, с целью повышения точности стабилизации частоты вращения ведущего вала, в него введены...
Спосіб визначення коефіцієнта демпфірування і пристрій для його здійснення
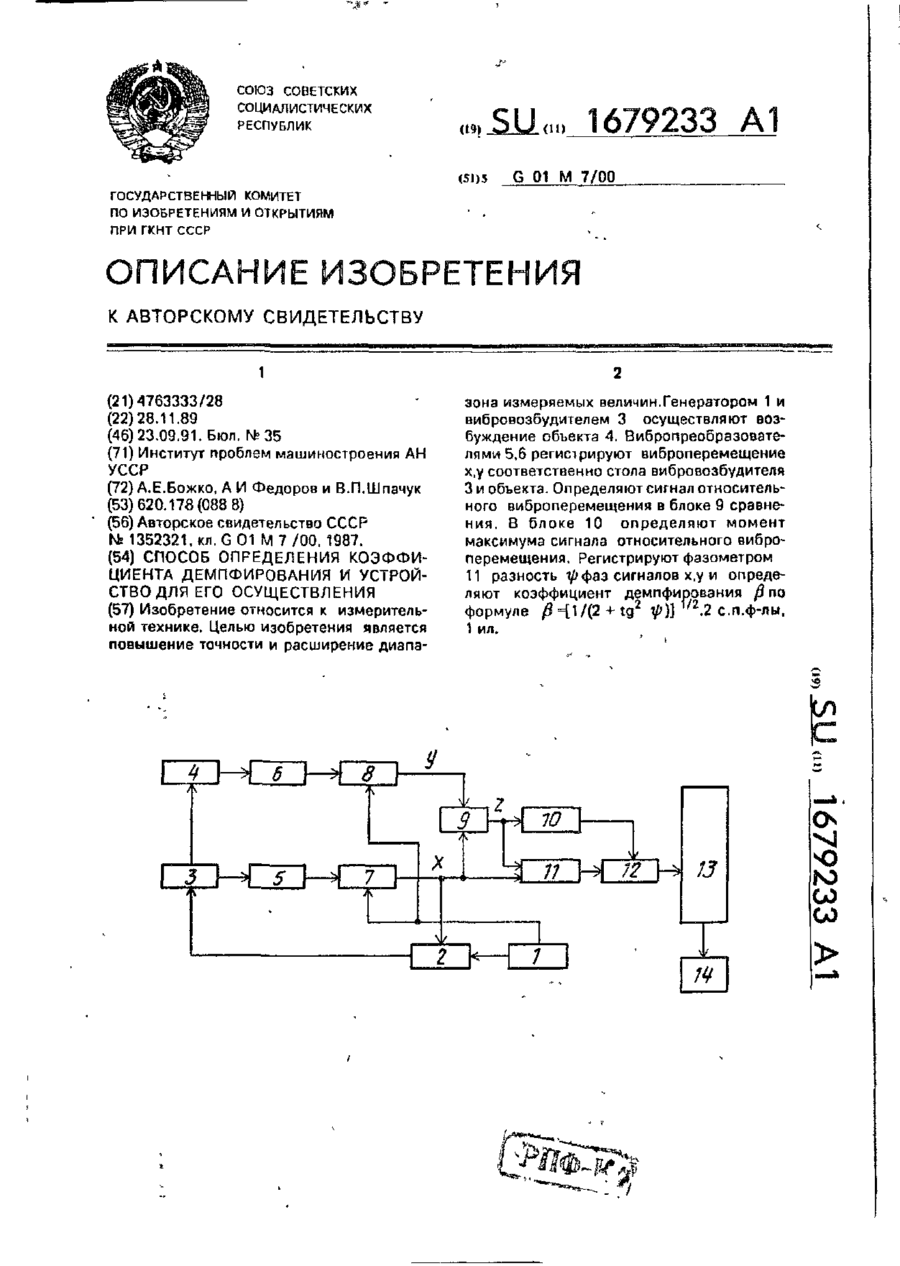
Номер патенту: 5877
Опубліковано: 29.12.1994
Автори: Шпачук Володимир Петрович, Божко Олександр Євгенович, Федоров Олександр Іванович
Мітки: коефіцієнта, пристрій, здійснення, демпфірування, спосіб, визначення
Формула / Реферат:
1. Способ определения коэффициента демпфирования объекта, заключающийся в том, что возбуждают вынужденные колебания механического объекта, закрепленного на столе вибровозбудителя в диапазоне частот прирезонансной области при постоянном уровне виброперемещений стола, регистрируют сигналы х, у, пропорциональные виброперемещениям соответственно стола вибро возбудителя и механического объекта, и определя ют коэффициент демпфирования,...