Перетворювач переміщення в код
Номер патенту: 18577
Опубліковано: 25.12.1997
Автори: Рижков Олександр Володимирович, Туманов Юрій Германович, Асалієв Ерзіман Мурадович, Мірошніков Андрій Олександрович, Лунін Володимир Михайлович
Формула / Реферат
Преобразователь перемещения в код, содержащий оптически связанные между собой излучатель, модулятор, коллиматор и анализатор, генератор, выход которого соединен с управляющим входом модулятора, двигатель, связанный с анализатором, формирователь начала отсчета, оптически связанный с анализатором, последовательно соединенные усилитель, демодулятор и фильтр, анализатор выполнен в виде прозрачного диска радиусом с тремя активными участками, первый из которых ограничен радиусами и и выполнен непрозрачным, второй активный участок выполнен в виде сектора радиусом стороны которого располагаются на угол относительно биссектрисы, причем на пересечении биссектрисы второго активного участка с первым активным участком на первом активном участке выполнено прозрачное окно, третий активный участок ограничен двумя спиралями Архимеда, развернутыми из центра диска по радиусу на угол причем точки пересечения этих спиралей с радиусом разнесены на угол относительно биссектрисы второго активного участка, отличающийся тем, что в него введены распределенный фотоприемник, блок согласования, блок обработки, блок управления двигателем, второй и третий активные участки диска анализатора выполнены с возможностью рассеивания света, распределенный фотоприемник оптически связан с анализатором, а его выходы соединены со входами блока согласования, выходы которого соединены со входами усилителя, выход, фильтра соединен с первым входом блока обработки, второй вход которого подключен к выходу формирователя начала отсчета, выход блока обработки соединен со входом блока управления двигателем, выход которого соединен с двигателем, первая и вторая группы выходов блока обработки являются первой и второй группой информационных выходов преобразователя, шина управления блока обработки является управляющими входами преобразователя и одновременно его вспомогательными выходами.
Текст
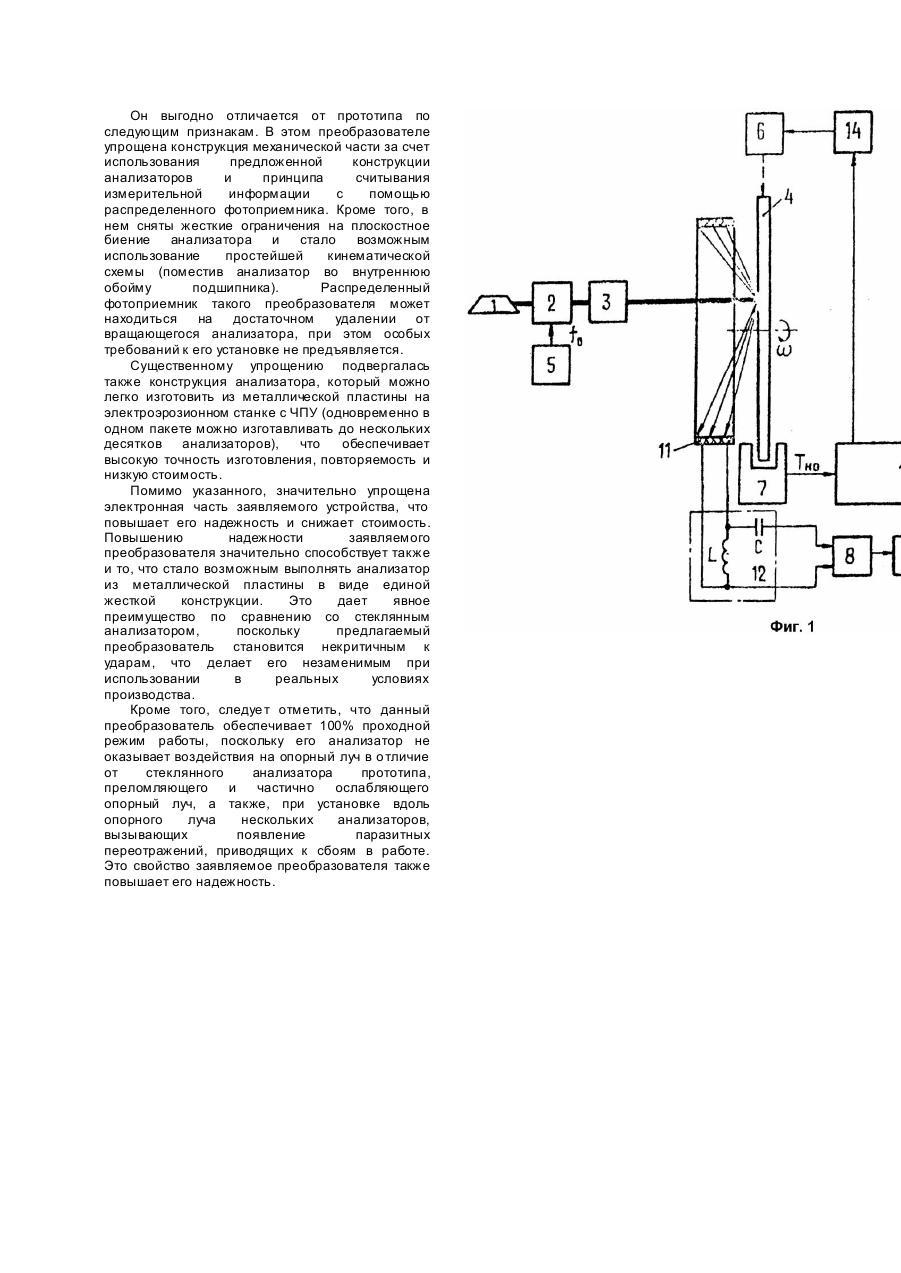
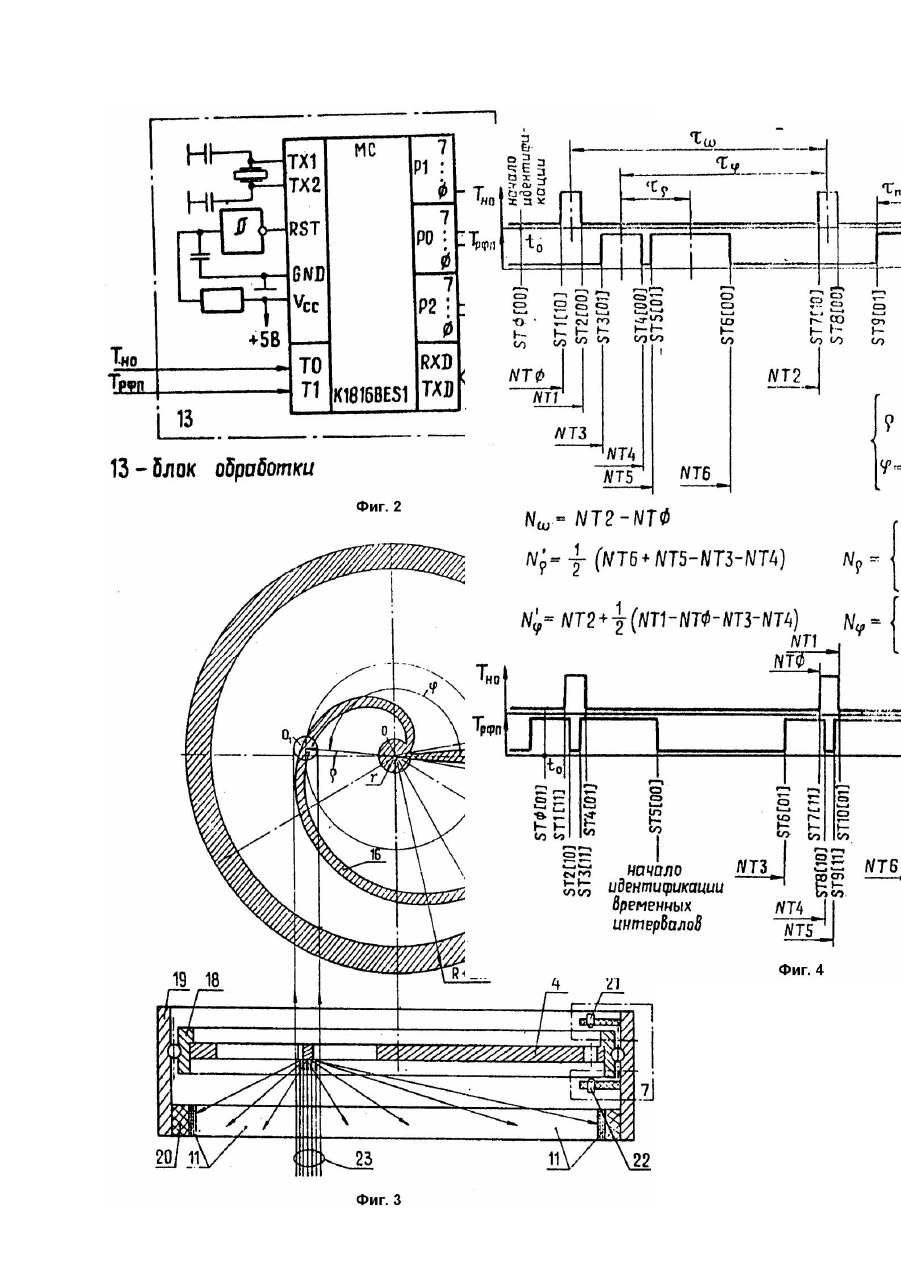
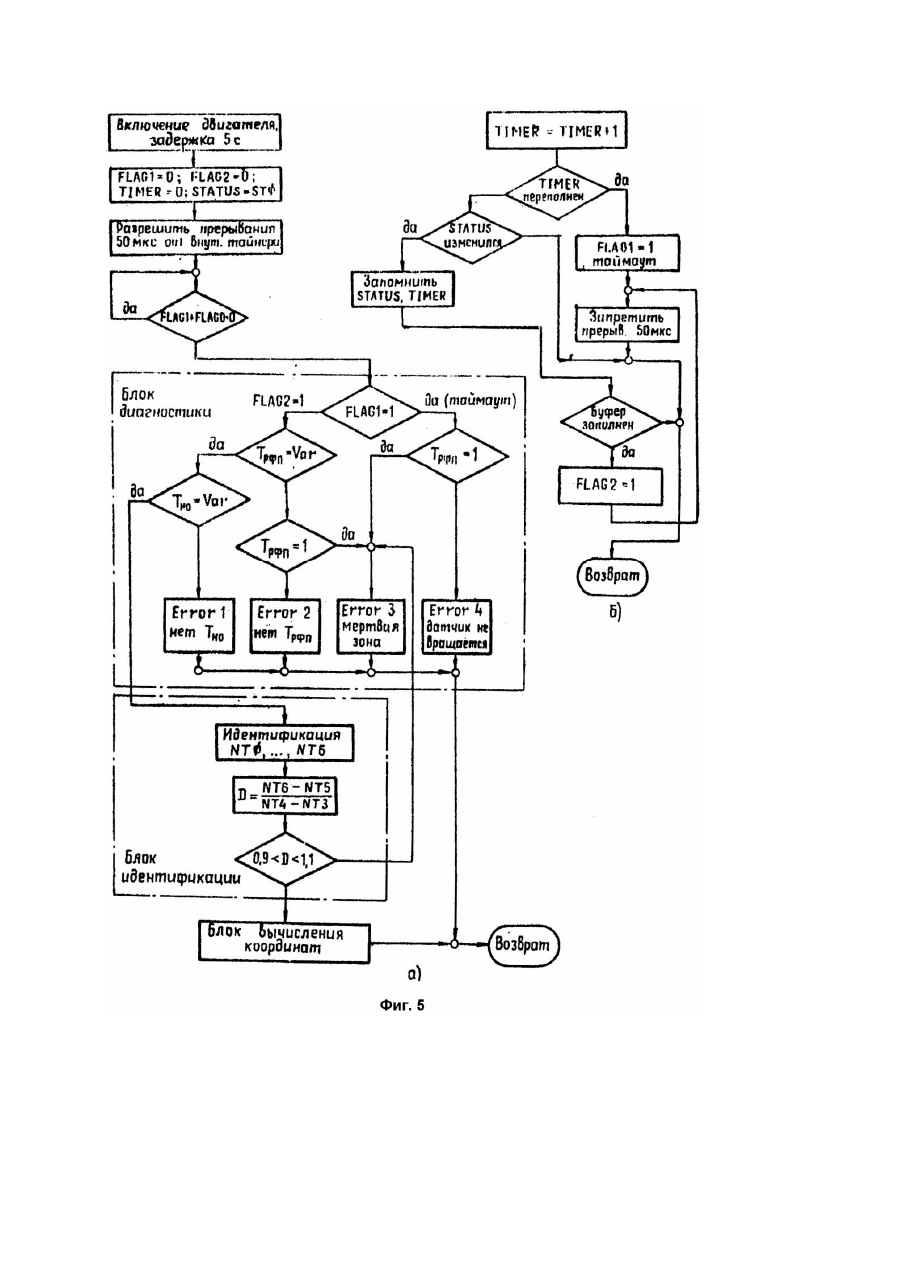
Изобретение относится к области информационно-измерительной техники и может быть использовано для контроля пространственного положения крупногабаритных изделий в процессе сборки, установки и монтажа, а также для проведения центровочных работ. Известно устройство преобразования перемещения в код [1], содержащее излучатель, оптически связанный через последовательно расположенные коллиматор, анализатор и линзу с фотоприемником, а также формирователь начала отсчета, оптически связанный с анализатором, блок обработки. Достоинством устройства является простота конструкции и алгоритма преобразования, а также возможность реализации большого диапазона измерения перемещений при бесконтактном методе измерения. К недостаткам следует отнести низкую точность измерений, обусловленную конечным диаметром опорного луча в плоскости анализатора, причем этот диаметр изменяется при изменении расстояния от излучателя до анализатора и численное значение его измерить невозможно. Погрешность измерения увеличивает также нескомпенсированная случайная погрешность от турбулентности оптического тракта между излучателем и анализатором. Существенным недостатком является также невозможность проведения проходного режима, т.е. обеспечения возможности измерения перемещений нескольких контролируемых точек объекта, расположенных вдоль опорного луча с помощью нескольких датчиков, так как датчик непрозрачен для опорного луча. Проходной режим работы необходим, например, при центровке линии валопровода и др. Введение дополнительных приспособлений для расщепления опорного луча - полупрозрачные пластинки, призмы и пр. - отрицательно влияют на точность измерения и приводят к усложнению технологической оснастки. Наиболее близким по технической сущности к заявляемому те хническому решению является преобразователь перемещения в код [2], содержащий оптически связанные между собой излучатель, модулятор, коллиматор и анализатор, генератор, выход которого соединен с управляющим входом модулятора, двигатель, обеспечивающий вращение анализатора, формирователь начала отсчета, оптически связанный с анализатором, а также последовательно соединенные усилитель, демодулятор и фильтр. К достоинствам известного устройства следует отнести возможность обеспечения проходного режима работы, а также высокую точность измерения, обусловленную: - алгоритмом определения координат по серединам импульсов, позволяющий полностью скомпенсировать погрешность измерения координаты и в значительной степени координаты опорного луча в плоскости анализатора из-за конечности и неопределенности эффективного радиуса опорного луча; - значительным подавлением случайной составляющей погрешности из-за турбулентности воздушного тракта между излучателем и анализатором. Существенным недостаткам известного устройства являются высокие требования к точности изготовления механической части для обеспечения минимального зазора (около 50мкм) между вращающимся анализатором и неподвижным считывающим кольцом. Ме ханическая схема, обеспечивающая данные требования, достаточно громоздка. Кроме того, при работе устройства в условиях сборочносварочного производства (запыленность, загазованность) в зазор между анализатором и считывающим кольцом неизбежно будет попадать пыль и грязь, что приведет к выходу датчика из строя. Другим недостатком, понижающим надежность известного устройства, является недостаточная защищенность прямолинейного и спиралевидного фотоприемников, напыленных на стеклянный диск. Устранение неизбежного загрязнения анализатора может привести к выходу из строя фотоприемников и необходимости замены анализатора, который сам по себе является дорогостоящим уникальным элементом. Кроме того, проходной режим работы, обеспечиваемый известным устройством, не является стопроцентным, поскольку опорный луч, проходя через стеклянный анализатор, преломляется (смещается параллельно самому себе), частично ослабляется, а также, при прохождении через несколько датчиков (установленных вдоль одной оси) неизбежно вызывает возникновение паразитных переотражений, что может привести к сбоям в работе, появлению дополнительных погрешностей измерения, что также снижает его надежность. Задачей, на решение которой направлено изобретение, является разработка устройства повышенной надежности и упрощенной конструкции при условии сохранения технических характеристик преобразователя. Поставленная задача решается тем, что в преобразователе перемещения в код, содержащем оптически связанные между собой излучатель, модулятор, коллиматор и анализатор, генератор, выход которого соединен с управляющим входом модулятора, двигатель, связанный с анализатором, формирователь начала отсчета, оптически связанный с анализатором, последовательно соединенные усилитель, демодулятор и фильтр, анализатор выполнен в виде прозрачного диска радиусом с тремя активными участками, первый из которых ограничен радиусами и и выполнен непрозрачным, второй активный участок выполнен в виде сектора радиусом стороны которого располагаются на угол относительно биссектрисы, причем на пересечении биссектрисы второго активного участка с первым активным участком, на первом активном участке выполнено прозрачное окно, третий активный участок ограничен двумя спиралями Архимеда, развернутыми из центра диска по радиусу на угол причем точки пересечения этих спиралей с радиусом разнесены на угол относительно биссектрисы второго активного участка, кроме того, в этот преобразователь дополнительно введены распределенный фотоприемник, блок согласования, блок обработки, блок управления двигателем, второй и третий активные участки диска анализатора выполнены с возможностью рассеивания света, распределенный фотоприемник оптически связан с анализатором, а его выходы соединены со входами блока согласования, выходы которого соединены со входами усилителя, выход фильтра соединен с первым входом блока обработки, второй вход которого подключен к выходу формирователя начала отсчета, выход блока обработки соединен со входом блока управления двигателем, выход которого соединен с двигателем, первая и вторая группы выходов блока обработки являются первой и второй группой информационных выходов преобразователя, шина управления блока обработки является управляющими входами преобразователя и одновременно его вспомогательными выходами. На фиг.1 изображена блок-схема заявляемого преобразователя перемещения в код; на фиг.2 вариант реализации блока обработки; на фиг.3 выполнение анализатора и связанных с ним блоков; на фиг.4 - временные диаграммы информационных сигналов, поступающих на вход блока обработки и принцип их идентификации; на фиг.5 - блок схема алгоритма функционирования блока обработки. Преобразователь перемещения в код содержит (фиг.1) оптически связанные между собой излучатель 1, модулятор 2, коллиматор 3 и анализатор 4, при этом к управляющему входу модулятора 2 подключен выход генератора 5. Двигатель 6 обеспечивает вращение анализатора 4. Формирователь начала отсчета 7 оптически связан с анализатором 4. Усилитель 8 последовательно соединен с демодулятором 9 и фильтром 10. Распределенный фотоприемник 11 оптически связан с анализатором 4, а его выходы соединены со входами блока согласования 12, выходы которого в сою очередь подключены ко входам усилителя 8. Вы ход блока обработки 13 (фиг.2) соединен со входом блока 14 управления двигателем, выполненного, например, в виде ключа, выход которого соединен с двигателем 6. На первый вход блока обработки 13 поступают сигналы с выхода фильтра 10, а на его второй вход - сигналы с выхода формирователя начала отсчета 7. Первая и вторая группы выходов блока обработки 13 являются первой и второй группой информационных выходов преобразователя. Шина управления блока обработки 13 является управляющими входами преобразователя и одновременно его вспомогательными выходами. Один из вариантов выполнения анализирующего блока представлен на фиг.3. При этом анализатор 4 закрепляется во внутренней обойме 18 подшипника, распределенный фотоприемник 11 закреплен на неподвижной внешней обойме 19 подшипника с помощью непроводящего кольца 20. Формирователь начала отсчета 7, состоящий из излучателя 21 и приемника 22, также закреплен на неподвижной обойме 19. Анализатор 4 приводится во вращение двигателем 6. При этом связь между анализатором 4 и двигателем 6 может быть кинематической, электромагнитной и т.д.; в зависимости от выполнения двигателя 5, принципиального значения для работы устройства это не имеет. Анализатор 4 выполнен в виде прозрачного диска радиусом с тремя активными участками, первый из которых ограничен радиусами и и выполнен непрозрачным. Второй активный участок выполнен в виде прямолинейного сектора 15 радиусом стороны которого располагаются на угол относительно биссектрисы. Третий активный участок выполнен в виде спиралевидного сектора 16, стороны которого образованы двумя спиралями Ар химеда, развернутыми из центра диска по радиусу на угол причем точки пересечения этих спиралей с радиусом разнесены на угол относительно биссектрисы сектора 15. В непрозрачной зоне первого активного участка анализатора 4, ограниченной радиусам и имеется прозрачное окно 17 для формирователя начала отсчета 7. Это окно 17 может быть расположено, например, на пересечении биссектрисы сектора 15 с первым активным участком. Согласно изобретению секторы 15 и 16 выполнены с возможностью рассеивания света. Предлагаемое устройство работает следующим образом. Излучатель 1, в качестве которого может быть использован гелий-неоновый лазер, с закрепленным на нем модулятором 2 и коллиматором 3 устанавливаются на неподвижной базовой оснастке и используются для задания опорного направления, Генератор 5 задает частоту модуляции луча излучателя 1. Анализатор 4 устанавливается в контролируемой точке и вращается в плоскости, перпендикулярной опорному лучу 23. Один раз за полный оборот анализатора 4 опорный луч пересекается прямолинейным 15 и спиралевидным 16 секторами. Анализатор 4 может быть изготовлен, например, из шлифованной металлической пластины на электроэрозионном станке с числовым программным управлением (ЧПУ), позволяющим обеспечить точность реза порядка 5мкм. При попадании опорного луча на поверхность анализатора 4 происходит его рассеяние в большом телесном угле. При этом рассеянный световой поток попадает на распределенный фотоприемник 11, установленный перед анализатором 4 (фиг.3). Распределенный фотоприемник 11 может состоять, например, из солнечных фотоэлементов ЭСК-14, наклеенных на непроводящее кольцо 20 и соединенных параллельно. Для обеспечения уверенного приема рассеянного анализатором 4 модулированного потока излучения с целью компенсации большой собственной емкости распределенного фотоприемника 11 используется блок согласования 12, состоящий из индуктивности и конденсатора развязки по постоянному току Индуктивность подключается параллельно фотоэлементам распределенного фотоприемника 11 и ее значение определяется из условия резонанса контура на частоте модуляции опорного луча. Таким образом, фотоэлементы распределенного фотоприемника 11 работают в режиме короткого замыкания, обеспечивающем максимальное быстродействие и соотношение сигнал - шум. С выхода блока согласования 12 радиоимпульс поступает на вход усилителя 8, а затем детектируется в демодуляторе 9 и через фильтр 10 нижних частот сигнал огибающей поступает на первый вход блока обработки 13. Как видно из фиг.4, сигнал состоит из двух составляющих и - импульсов, соответствующи х пересечению прямолинейным и спиралевидным секторами анализатора 4 опорного луча. В данном случае длительность импульса меньше длительности импульса поскольку угол раствора прямолинейного сектора 15 выбран меньше угла раствора спиралевидного сектора 16 Таким образом, эти импульсы легко идентифицировать по длительности. Один раз за полный оборот диска анализатора 4 прозрачное окно 17 (фиг.3) открывает путь свето вому потоку от излучателя 21 к приемнику 22, входящи х в формирователь отсчета 7. При этом на выходе последнего вырабатывается импульс (фиг.4), поступающий на второй вход блока обработки 13. Период следования импульсов равен периоду вращения анализатора 4 Полярная координата центра опорного луча относительно центра анализатора 4 пропорциональна длительности импульса между центрами импульсов и (фиг.4), а полярная координата - дли тельности импульса между центрами импульсов и При этом значения этих координат вычисляются по формулам Использование описанного выше алгоритма определения координат по серединам импульсов позволяет полностью компенсировать погрешность определения координаты и в значительной степени погрешность координаты от изменяющегося эффективного значения радиуса r пятна от опорного луча в плоскости анализатора 4. Под эффективным значением радиуса r понимается максимальное расстояние от центра пятна до точки, интенсивность излучения в которой равна порогу срабатывания распределенного фотоприемника 11 при наезде на пятно одного из секторов анализатора 4. В блоке обработки 13 производится идентификация измерительных сигналов и поступающих на его вход, определение длительности импульсов и а также проведение вычисления координат и по формулам (1). В качестве блока обработки 13 можно использовать, например, серийно выпускаемую однокристальную микроЭВМ К 1816ВЕ51, (см. фиг.2). Эта микросхема содержит постоянное запоминающее устройство (ППЗУ) с ультрафиолетовым стиранием объемом 4Кбайт, оперативное запоминающее устройство (ОЗУ) емкостью 128байт, два 16-разрядных таймерасчетчика, генератор со схемами синхронизации, один порт последовательного обмена и три 1байтовых параллельных порта ввода-вывода. Таким образом, функциональный состав этой микросхемы позволяет реализовать блок обработки 13 без привлечения дополнительных аппаратных средств (кроме цепи задания тактовой частоты и аппаратного сброса при включении питания). Один из вариантов подключения к блоку обработки 13 внешних устройств показан на фиг.2. Блок-схема одного из возможных алгоритмов обработки входной измерительной информации представлена на фиг.5. Принцип измерения и идентификации входных сигналов и состоит в следующем. По сигналу извне (например от микроЭВМ верхнего уровня, связанный с блоком обработки 13 по последовательному интерфейсу, или от ручного пульта) запускается основная программа (фиг.5а). При этом с помощью блока 14 запускается двигатель 6 и дается временная задержка на разгон анализатора 4. После этого производится начальная установка программных флагов (обнуление счетчика максимального интервала проведения измерения), (обнуление счетчика буфера состояний сигналов и (обнуление таймера реального времени), а также в буфер состояний заносится начальное значение сигналов и После этого разрешаются прерывания от внутреннего таймера с интервалом 50мкс. Алгоритм работы программы, обслуживающей прерывания от внутреннего таймера, представлен на фиг.5,б. После поступления очередного прерывания инкрементируется таймер реального времени, проверяется состояние входных сигналов и и, если это состояние отличается от предыдущего, в буфер состояний записывается его значение и соответствующее значение таймера реального времени (слово состояния). Как будет показано ниже, для полной идентификации измерительных сигналов максимальный размер буфера состояний должен быть равен 14 словам. После записи очередного слова состояния проверяется заполнение буфера. В случае, если буфер заполнен, устанавливается запрещаются прерывания и управление передается основной программе для идентификации неисправностей. Принцип идентификации входной информации представлен на фиг.4. На верхней диаграмме показаны значения слов состояний, занесенных в буфер состояний (всего 14 слов), при этом момент времени соответствует старту основной программы. Идентификация сигналов и начинается со слова состояния, соответствующего низким уровням сигналов и (на верхней диаграмме состояния имеет вид: Буфер При этом моменты времени, соответствующие первым трем изменениям состояния сигнала (после начала идентификации), определяются следующим образом: поступает, а пятно от опорного луча попадает в центр анализатора 4 или на его периферию а моменты времени, соответствующие первым "датчик не вращается" (одновременно отсутствуют сигналы и По завершению диагностики производится идентификация временных интервалов четырем изменениям состояния сигнала (после начала идентификации) принимаются равными: Затем по описанному выше алгоритму. производится проверка на "слипание" импульсов и (это может произойти, когда пятно от опорного луча находится на периферии диска анализатора 4 и сигналы от пересечения пятна прямолинейным 15 и спиралевидным 16 секторами анализатора 4 "слипаются" между собой). При этом длительности, идентифицированных по приведенному выше алгоритму импульсов и совпадут. Это состояние будет определено программой как ошибка типа "мертвая зона". В случае правильной идентификации временных интервалов в блоке вычисления координат определяются значения и по формулам (2) - (6), а затем вычисляются значения полярных координат центра опорного луча относительно центра анализатора по формулам: где - частота квантования (в данном случае используется На нижней диаграмме (фиг.4) показана ситуация, когда момент старта основной программы состояния одного из информационных сигналов соответствуе т высокому уровню. Начало идентификации в данном случае соответствует слову состояния а искомые временные интервалы определяются следующим образом: Как видно из фиг.4, для полной идентификации интервалов времени необходимо запомнить изменения сигналов и за два оборота анализатора 4. При этом достаточно размер буфера состояния ограничить 14 словами. Как видно из алгоритма основной программы, после установки одного из флагов состояния или управление передается блоку диагностики, в котором проверяется наличие измерений состояния сигналов иза время измерения и идентифицируются четыре типа ошибок: - нет сигнала - нет сигнала "мертвая зона" (сигнал Использование блока обработки 13 на базе однокристальной микроЭВМ К1816ВЕ51, позволяет с минимальными аппаратурными затратами и высокой степенью надежности реализовать функцию преобразования информационных параметров сигналов и в код, пропорциональный полярным координатам и центра опорного луча относительно центра анализатора 4. При этом выходной код и может выдаваться побайтно через параллельные порты, либо по последовательному каналу обмена. Для минимизации случайной погрешности вследствие турбулентности воздушного тракта между излучателем 1 и анализатором 4 может быть использована статистическая обработка результатов измерения (практика показывает, что достаточно эффективно простое усреднение результатов измерения, где в зависимости от условий трассы). При этом такая обработка может производиться в самом блоке обработки 13 по отдельной программе, записанной в ППЗУ микроЭВМ К1816ВЕ51, либо в микроЭВМ верхнего уровня. Таким образом, заявляемый преобразователь перемещения в код обладает: - высокой точностью определения полярных координат центра опорного луча относительно центра анализатора; - значительным подавлением случайной погрешности из-за турбулентности воздушного тракта между излучателем и анализатором; - бесконтактностью метода измерения и проходным режимом работы. Он выгодно отличается от прототипа по следующим признакам. В этом преобразователе упрощена конструкция механической части за счет использования предложенной конструкции анализаторов и принципа считывания измерительной информации с помощью распределенного фотоприемника. Кроме того, в нем сняты жесткие ограничения на плоскостное биение анализатора и стало возможным использование простейшей кинематической схемы (поместив анализатор во внутреннюю обойму подшипника). Распределенный фотоприемник такого преобразователя может находиться на достаточном удалении от вращающегося анализатора, при этом особых требований к его установке не предъявляется. Существенному упрощению подвергалась также конструкция анализатора, который можно легко изготовить из металлической пластины на электроэрозионном станке с ЧПУ (одновременно в одном пакете можно изготавливать до нескольких десятков анализаторов), что обеспечивает высокую точность изготовления, повторяемость и низкую стоимость. Помимо указанного, значительно упрощена электронная часть заявляемого устройства, что повышает его надежность и снижает стоимость. Повышению надежности заявляемого преобразователя значительно способствует также и то, что стало возможным выполнять анализатор из металлической пластины в виде единой жесткой конструкции. Это дает явное преимущество по сравнению со стеклянным анализатором, поскольку предлагаемый преобразователь становится некритичным к ударам, что делает его незаменимым при использовании в реальных условиях производства. Кроме того, следуе т отметить, что данный преобразователь обеспечивает 100% проходной режим работы, поскольку его анализатор не оказывает воздействия на опорный луч в о тличие от стеклянного анализатора прототипа, преломляющего и частично ослабляющего опорный луч, а также, при установке вдоль опорного луча нескольких анализаторов, вызывающих появление паразитных переотражений, приводящих к сбоям в работе. Это свойство заявляемое преобразователя также повышает его надежность.
ДивитисяДодаткова інформація
Назва патенту англійськоюCode-interleaving converter
Автори англійськоюLunin Volodymyr Mykhailovych, Ryzhkov Oleksandr Volodymyrovych, Asaliiev Erziman Muradovych, Miroshnikov Andrii Oleksandrovych, Tumanov Yurii Hermanovych
Назва патенту російськоюПреобразователь перемещения в код
Автори російськоюЛунин Владимир Михайлович, Рыжков Александр Владимирович, Асалиев Эрзиман Мурадович, Мирошников Андрей Александрович, Туманов Юрий Германович
МПК / Мітки
МПК: H03M 1/22, H03M 1/06, G01B 9/00, G01B 7/16
Мітки: код, перетворювач, переміщення
Код посилання
<a href="https://ua.patents.su/7-18577-peretvoryuvach-peremishhennya-v-kod.html" target="_blank" rel="follow" title="База патентів України">Перетворювач переміщення в код</a>
Двокоординатний лазерний перетворювач переміщення в код
Номер патенту: 6697
Опубліковано: 29.12.1994
Автори: Мірошніков Андрій Олександрович, Рижков Алєксандр Владіміровіч, Лунін Володимир Михайлович
МПК: H03M 1/22
Мітки: переміщення, двокоординатний, перетворювач, лазерний, код
Формула / Реферат:
Двухкоординатный лазерный преобразователь перемещения в код, содержащий излучатель, оптически связанный с четырехквадрантным фотодетектором, первый и второй интеграторы, выходы которых соединены с информационными входами, соответственно, первого и второго устройства выборки-хранения, выходы которых соединены с информационными входами, соответственно, первого и второго преобразователей напряжение-интервал времени, выходы которых соединены,...
Перетворювач швидкості переміщення в код
Номер патенту: 3223
Опубліковано: 26.12.1994
Автори: Брезе Євген Юрійович, Данілов Ніколай Алєксєєвіч
МПК: H03M 1/50
Мітки: переміщення, код, перетворювач, швидкості
Формула / Реферат:
Преобразователь скорости перемещения в код, содержащий последовательно соединенные генератор импульсов, блок питания, фазовращатель, кинематический вход которого является входом преобразователя, и формировать фазовых импульсов, синхронизатор, первый вход которого соединен с выходом генератора импульсов, и счетчик, отличающийся тем, что в него введены регистр, формирователь прерываний и вычислитель, причем выход генератора импульсов соединен...
Перетворювач переміщення у послідовність імпульсів
Номер патенту: 5042
Опубліковано: 28.12.1994
Автори: Перельмутер Віктор Моісейович, Забішна Наталія Артемівна, Суходольський Сергій Олександрович, Рубінштейн Григорій Маркович
Мітки: перетворювач, імпульсів, послідовність, переміщення
Формула / Реферат:
Преобразователь перемещения в последовательность импульсов, содержащий n-фазный датчик перемещения, два n-разрядных регистра, шину синхронизации, выходы n-фазного датчика перемещения подключены к входам данных первого регистра, выходы которого подключены к входам данных второго регистра, шина синхронизации подключена к синхровходам первого и второго регистров, отличающийся тем, что, с целью повышения разрешающей способности, в него...
Перетворювач переміщення в фазу синусоїдного сигналу
Номер патенту: 1821
Опубліковано: 20.12.1994
Автор: Ярославцев Михайло Іванович
МПК: G01B 21/00
Мітки: перетворювач, переміщення, фазу, синусоїдного, сигналу
Формула / Реферат:
Преобразователь перемощений в фазу синусоидального сигнала, содержащий синусно-косинусный датчик перемещений, дифференцирующий элемент сдвига фазы, вход которого соединен с первым выходом синусно-косинусного датчика перемещений, и суммирующий усилитель, первый вход которого соединен с выходом дифференцирующего элемента сдвига фазы, а второй вход — со вторым выходом синусно-косинусного датчика перемещений, отличающийся тем, что, с целью...
Пристрій для вимірювання швидкості переміщення
Номер патенту: 2063
Опубліковано: 20.12.1994
Автор: Ярославцев Михайло Іванович
МПК: G01P 3/42
Мітки: пристрій, переміщення, вимірювання, швидкості
Формула / Реферат:
1. Устройство для измерения скорости перемещения, содержащее генератор эталонной частоты, делитель частоты и последовательно соединительные блок питания, фазовращатель, компаратор, многоканальный распределитель импульсов, многоканальный формирователь опорных импульсов, многовходовую логическую схему и блок осреднения, выход генератора эталонной частоты соединен с дополнительным входом многоканального формирователя опорных импульсов,...
Попередній патент: Запобіжний клапан акумулятора
Наступний патент: Адсорбційний акумулятор теплоти
Випадковий патент: Спосіб оптимізації живлення рослин на ранніх етапах розвитку