Спосіб отримання електромагнітних коливань при зміні положення тіла, що має внутрішню електромагнітну енергію
Номер патенту: 30737
Опубліковано: 11.03.2008
Автори: Лапицький Сергій Володимирович, Сендецький Микола Миколайович, Машталір Вадим Віталійович, Гусак Юрій Аркадійович, Василенко Олександр Васильович, Комаров Володимир Олександрович
Формула / Реферат
1. Спосіб отримання електромагнітних коливань при зміні положення тіла, що має внутрішню електромагнітну енергію, при якому попередньо підготовляють стволоподібну трубу та підготовляють тіло для пересування його по каналу труби, встановлюють на стволоподібну трубу осесиметрично поздовжній осі зазначеної труби два соленоїди, кожний з яких має свою зовнішню систему накопичення електромагнітної енергії та блоки керування, керування якими відбувається системою керування, вставляють всередину труби тіло для пересування по каналу труби, проводять заряджання зовнішніх систем накопичення електромагнітної енергії, подають керуючий сигнал з системи керування на перший блок керування, подають за допомогою першого блока керування електричний струм зазначеної величини з першої системи накопичення електромагнітної енергії на перший соленоїд, створюють першим соленоїдом електромагнітне поле на час протікання електричного струму і забезпечують рух тіла до середини труби за час подачі електричного струму з подальшим перетворенням кінетичної енергії руху тіла по каналу труби в енергію електромагнітних коливань та наступне переміщення тіла по каналу труби за її середину за допомогою кінетичної енергії руху, після проходу тіла середини труби відключають за допомогою системи керування перший блок керування першого соленоїда, що призупиняє подачу електричного струму на перший соленоїд, і здійснюють за допомогою системи керування перемикання системи на другий блок керування та подають керуючий сигнал з системи керування на зазначений другий блок керування, вводять в дію за допомогою керуючого сигналу другий блок керування, подають за допомогою другого блока керування електричний струм зазначеної величини з другої системи накопичення електромагнітної енергії на другий соленоїд, створюють другим соленоїдом електромагнітне поле і забезпечують рух тіла у зворотному напрямку до середини труби за час подачі струму з подальшим перетворенням кінетичної енергії руху тіла по каналу труби в енергію електромагнітних коливань і наступне переміщення тіла у зазначеному зворотному напрямку по каналу труби за її середину за допомогою кінетичної енергії руху, а електромагнітні коливання створюються періодичною подачею електричного струму П-подібного імпульсу на перший та другий соленоїди з величиною зазначеного імпульсу, що триває до моменту перетинання тілом середини труби, і у який системою керування здійснюється перемикання блоків керування, який відрізняється тим, що попередньо розміщують всередині тіла джерело внутрішньої енергії, перед початком руху тіла по каналу труби здійснюють накопичення джерелом внутрішньої енергії, що розміщене в тілі, внутрішньої електромагнітної енергії, доводять накопичення енергії до рівня максимальної взаємодії магнітних полів соленоїдів і тіла, забезпечують прискорення тіла та збільшення характеристик випромінювання шляхом додавання та взаємодії магнітного поля електричного струму, що протікає в джерелі внутрішньої електромагнітної енергії зазначеного тіла з магнітним полем, яке створюється на обмотках соленоїдів та випромінюється через них в процесі руху тіла по каналу труби у той чи інший бік відносно середини труби, а електромагнітні коливання створюються періодично в моменти руху прискореного тіла з джерелом внутрішньої електромагнітної енергії по каналу труби завдяки створенню електромагнітного поля електричним струмом, що протікає в джерелі внутрішньої електромагнітної енергії, та випромінюванню через обмотки соленоїдів.
2. Спосіб за п. 1, який відрізняється тим, що соленоїди встановлюються симетрично відносно середини труби і так, що їх котушки мають зустрічну намотку.
3. Спосіб за п. 1, який відрізняється тим, що соленоїди розміщуються по всій довжині труби і мають однакові характеристики.
4. Спосіб за п. 1, який відрізняється тим, що джерело внутрішньої енергії розміщують в тілі переважно в його центральній частині.
5. Спосіб за п. 1, який відрізняється тим, що тіло виготовляють у вигляді резонатора-накопичувача електромагнітної енергії.
6. Спосіб за п. 1, який відрізняється тим, що струм, який протікає в першому соленоїді, є, відповідно, протилежним за напрямком відносно струму, який протікає у другому соленоїді.
Текст
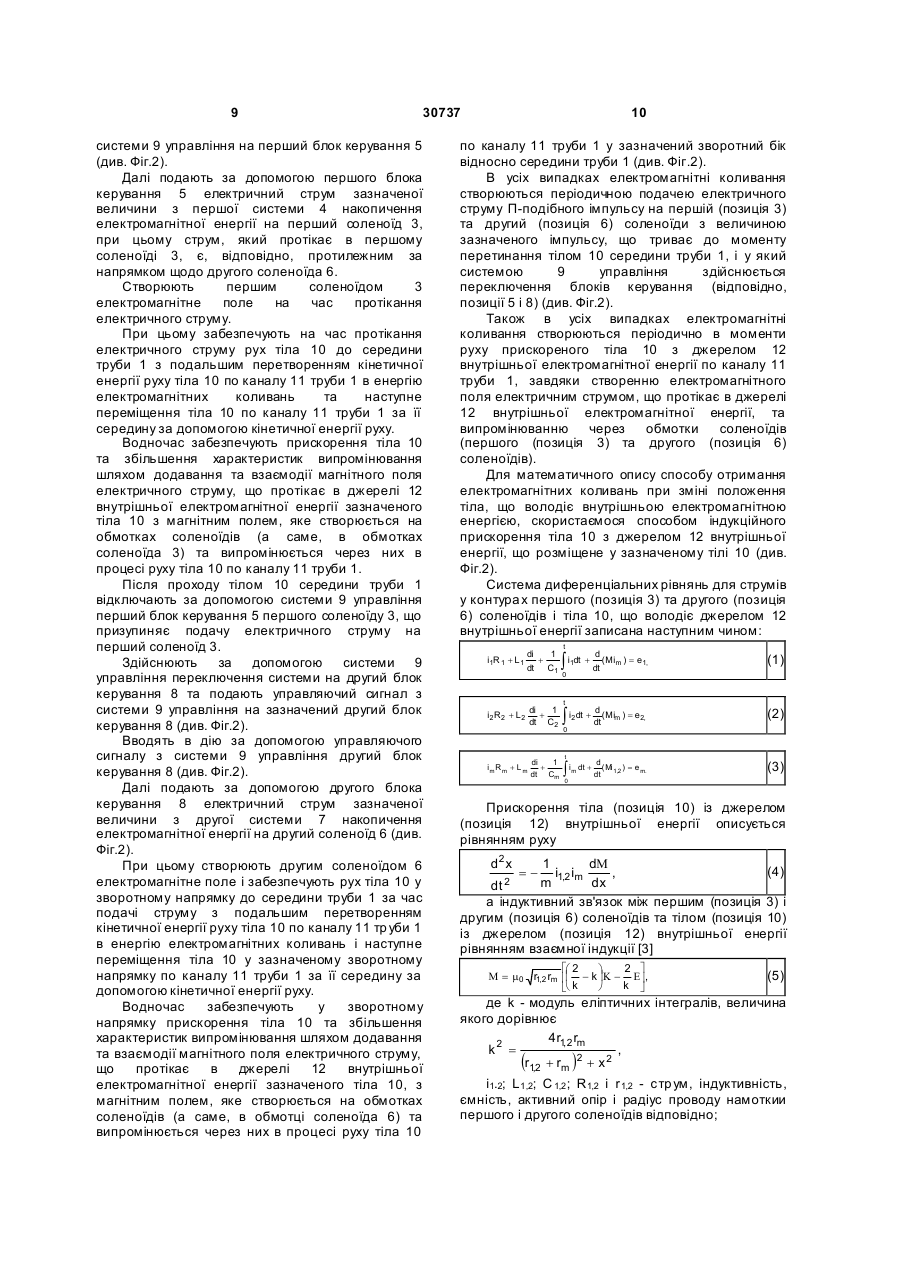
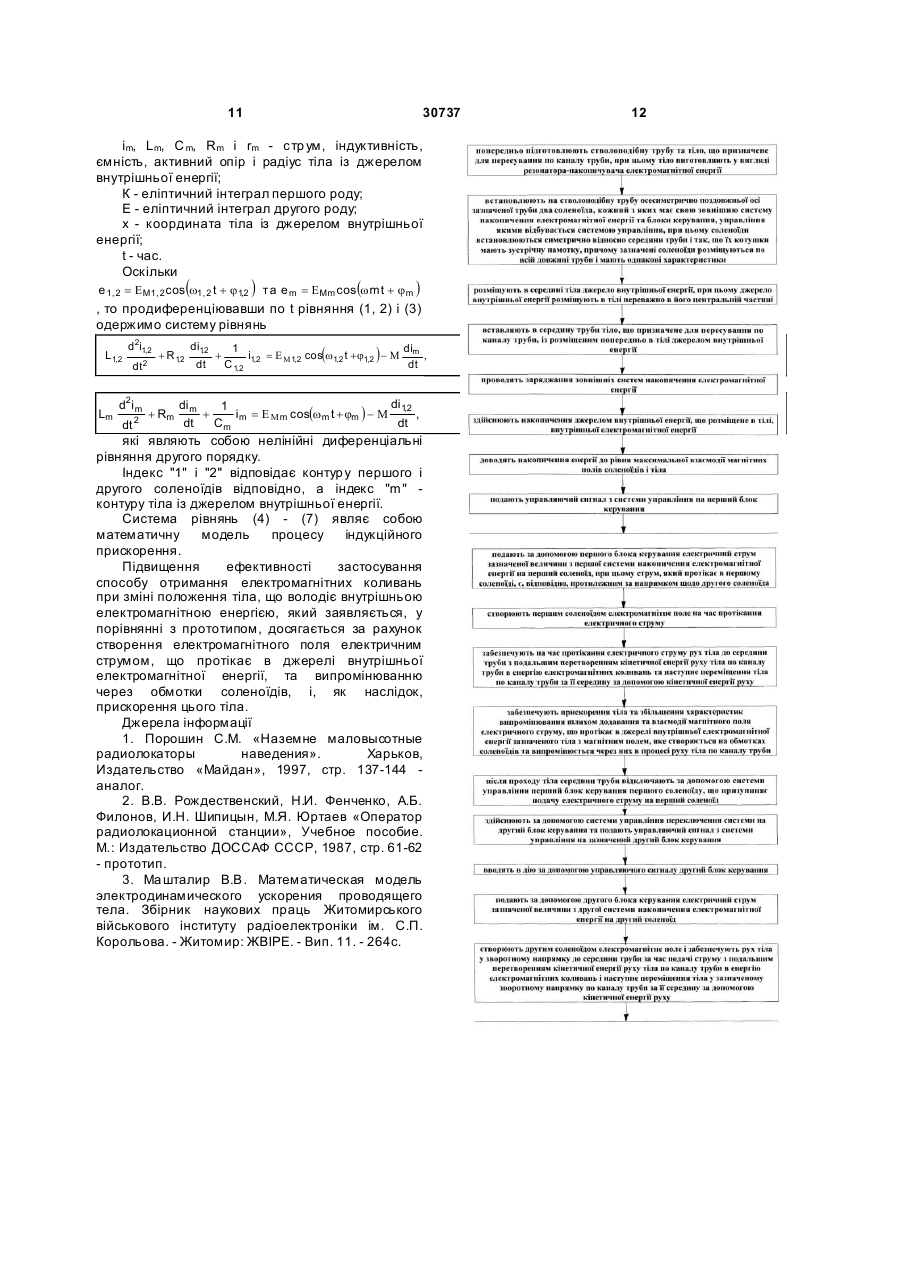
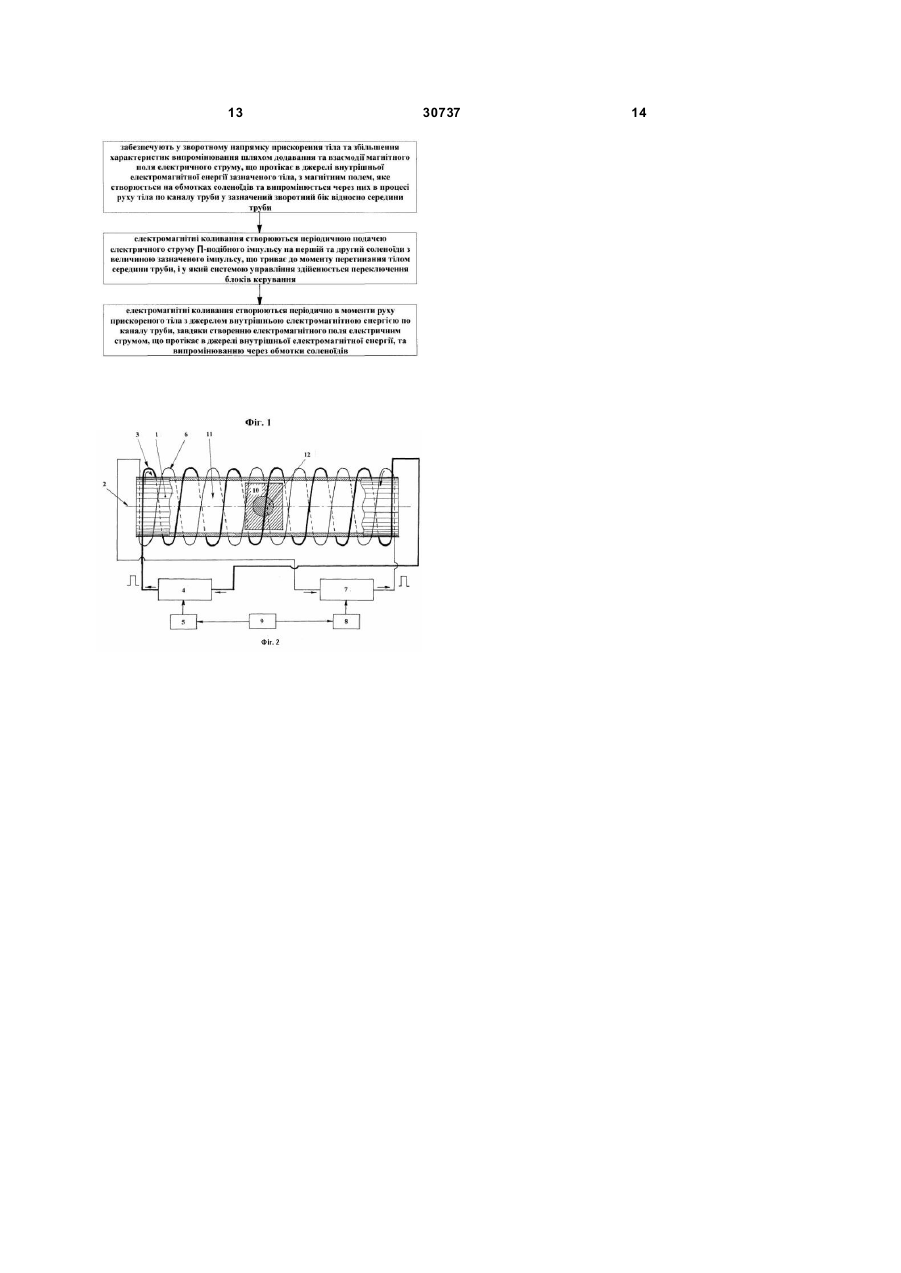
1. Спосіб отримання електромагнітних коливань при зміні положення тіла, що має внутрішню електромагнітну енергію, при якому попередньо підготовляють стволоподібну трубу та підготовляють тіло для пересування його по каналу труби, встановлюють на стволоподібну трубу осесиметрично поздовжній осі зазначеної труби два соленоїди, кожний з яких має свою зовнішню систему накопичення електромагнітної енергії та блоки керування, керування якими відбувається системою керування, вставляють всередину труби тіло для пересування по каналу труби, проводять заряджання зовнішніх систем накопичення електромагнітної енергії, подають керуючий сигнал з системи керування на перший блок керування, подають за допомогою першого блока керування електричний струм зазначеної величини з першої системи накопичення електромагнітної енергії на перший соленоїд, створюють першим соленоїдом електромагнітне поле на час протікання електричного струму і забезпечують рух тіла до середини труби за час подачі електричного струму з подальшим перетворенням кінетичної енергії руху тіла по каналу труби в енергію електромагнітних коливань та наступне переміщення тіла по каналу труби за її середину за допомогою кінетичної енергії руху, після проходу тіла середини труби відключають за допомогою системи керування перший блок керування першого соленоїда, що призупиняє подачу електричного струму на перший соленоїд, і здійснюють за допомогою системи керування 2 (19) 1 3 30737 4 електромагнітної енергії, та випромінюванню через обмотки соленоїдів. 2. Спосіб за п. 1, який відрізняється тим, що соленоїди встановлюються симетрично відносно середини труби і так, що їх котушки мають зустрічну намотку. 3. Спосіб за п. 1, який відрізняється тим, що соленоїди розміщуються по всій довжині труби і мають однакові характеристики. 4. Спосіб за п. 1, який відрізняється тим, що джерело внутрішньої енергії розміщують в тілі переважно в його центральній частині. 5. Спосіб за п. 1, який відрізняється тим, що тіло виготовляють у вигляді резонатора-накопичувача електромагнітної енергії. 6. Спосіб за п. 1, який відрізняється тим, що струм, який протікає в першому соленоїді, є, відповідно, протилежним за напрямком відносно струму, який протікає у др угому соленоїді. Корисна модель відноситься до галузі радіотехніки, зокрема, до техніки НВЧ, а саме, до способів отримання електромагнітних коливань при зміні положення тіла, що володіє внутрішньою електромагнітною енергією. Відомий спосіб отримання електромагнітних коливань при зміні положення тіла, при якому попередньо підготовлюють направляючу трубчасто го типу та підготовляють тіло для пересування його по каналу направляючої, встановлюють на направляючу два соленоїда, кожний з яких має свою зовнішню систему накопичення електромагнітної енергії та блоки керування, вставляють в середину направляючої тіло для пересування по каналу зазначеної направляючої, проводять заряджання зовнішніх систем накопичення електромагнітної енергії, подають управляючий сигнал на перший блок керування, подають за допомогою першого блока керування електричний струм зазначеної величини з першої системи накопичення електромагнітної енергії на перший соленоїд, створюють першим соленоїдом електромагнітне поле на час протікання електричного струму і забезпечують рух тіла до середини труби за час подачі електричного струму та наступне переміщення тіла по каналу направляючої за її середину за допомогою кінетичної енергії руху, після проходу тіла середини направляючої відключають перший блок керування першого соленоїду, що призупиняє подачу електричного струму на перший соленоїд, і здійснюють переключення системи на другий блок керування та подають управляючий сигнал на зазначений другий блок керування, подають за допомогою другого блока керування електричний струм зазначеної величини з другої системи накопичення електромагнітної енергії на другий соленоїд, створюють другим соленоїдом електромагнітне поле і забезпечують рух тіла у зворотному напрямку до середини направляючої за час подачі струму і наступне переміщення тіла у зазначеному зворотному напрямку по каналу направляючої за її середину за допомогою кінетичної енергії руху, а електромагнітні коливання створюються періодичною подачею електричного струму Пподібного або іншого за формою імпульсу на першій та другий соленоїди з величиною зазначеного імпульсу, що триває до моменту перетинання тілом середини направляючої, і у який здійснюється переключення блоків керування [1]. Недоліком відомого способу отримання електромагнітних коливань при зміні положення тіла, є відсутність джерела внутрішньої електромагнітної енергії в тілі, яке здійснює коливання, не дозволяє підвищити характеристики випромінювання електромагнітного поля, яке створюється в процесі руху тіла, на обмотках соленоїдів та випромінюється через них. Найбільш близьким технічним рішенням, обраним за прототип, є спосіб отримання електромагнітних коливань при зміні положення тіла, що володіє внутрішньою електромагнітною енергією, при якому попередньо підготовлюють стволоподібну трубу та підготовляють тіло для пересування його по каналу труби, встановлюють на стволоподібну трубу осесиметрично поздовжньої осі зазначеної труби два соленоїда, кожний з яких має свою зовнішню систему накопичення електромагнітної енергії та блоки керування, управління якими відбувається системою управління, вставляють в середину труби тіло для пересування по каналу труби, проводять заряджання зовнішніх систем накопичення електромагнітної енергії, подають управляючий сигнал з системи управління на перший блок керування, подають за допомогою першого блока керування електричний струм зазначеної величини з першої системи накопичення електромагнітної енергії на перший соленоїд, створюють першим соленоїдом електромагнітне поле на час протікання електричного струму і забезпечують рух тіла до середини труби за час подачі електричного струму з подальшим перетворенням кінетичної енергії руху тіла по каналу труби в енергію електромагнітних коливань та наступне переміщення тіла по каналу тр уби за її середину за допомогою кінетичної енергії руху, після проходу тіла середини труби відключають за допомогою системи управління перший блок керування першого соленоїду, що призупиняє подачу електричного струму на перший соленоїд, і здійснюють за допомогою системи управління переключення системи на другий блок керування та подають управляючий сигнал з системи управління на зазначений другий блок керування, вводять в дію за допомогою управляючого сигналу другий блок керування, подають за допомогою 5 30737 другого блока керування електричний струм зазначеної величини з другої системи накопичення електромагнітної енергії на другий соленоїд, створюють другим соленоїдом електромагнітне поле і забезпечують рух тіла у зворотному напрямку до середини труби за час подачі струму з подальшим перетворенням кінетичної енергії руху тіла по каналу труби в енергію електромагнітних коливань і наступне переміщення тіла у зазначеному зворотному напрямку по каналу труби за її середину за допомогою кінетичної енергії руху, а електромагнітні коливання створюються періодичною подачею електричного струму Пподібного імпульсу на першій та другий соленоїди з величиною зазначеного імпульсу, що триває до моменту перетинання тілом середини труби, і у який системою управління здійснюється переключення блоків керування [2]. Недоліком відомого способу отримання електромагнітних коливань при зміні положення тіла, що володіє внутрішньою електромагнітною енергією, обраного за прототип, є те, що неможливо збільшити характеристики випромінювання. В основу корисної моделі поставлено задачу шляхом прискорення тіла з накопиченою в ньому внутрішньою електромагнітною енергію, забезпечити збільшення характеристик випромінювання шляхом додавання та взаємодії магнітного поля електричного струму, що протікає в джерелі внутрішньої електромагнітної енергії зазначеного тіла з магнітним полем, яке створюється в процесі руху на обмотках соленоїдів та випромінюється через них. Суть корисної моделі у способі отримання електромагнітних коливань при зміні положення, що володіє вн утрішньою електромагнітною енергією, при якому попередньо підготовлюють стволоподібну трубу та підготовляють тіло для пересування його по каналу труби, встановлюють на стволоподібну трубу осесиметрично поздовжньої осі зазначеної труби два соленоїда, кожний з яких має свою зовнішню систему накопичення електромагнітної енергії та блоки керування, управління якими відбувається системою управління, вставляють в середину труби тіло для пересування по каналу труби, проводять заряджання зовнішніх систем накопичення електромагнітної енергії, подають управляючий сигнал з системи управління на перший блок керування, подають за допомогою першого блока керування електричний струм зазначеної величини з першої системи накопичення електромагнітної енергії на перший соленоїд, створюють першим соленоїдом електромагнітне поле на час протікання електричного струму і забезпечують рух тіла до середини труби за час подачі електричного струму з подальшим перетворенням кінетичної енергії руху тіла по каналу труби в енергію електромагнітних коливань та наступне переміщення тіла по каналу тр уби за її середину за допомогою кінетичної енергії руху, після проходу тіла середини труби відключають за 6 допомогою системи управління перший блок керування першого соленоїду, що призупиняє подачу електричного струму на перший соленоїд, і здійснюють за допомогою системи управління переключення системи на другий блок керування та подають управляючий сигнал з системи управління на зазначений другий блок керування, вводять в дію за допомогою управляючого сигналу другий блок керування, подають за допомогою другого блока керування електричний струм зазначеної величини з другої системи накопичення електромагнітної енергії на другий соленоїд, створюють другим соленоїдом електромагнітне поле і забезпечують рух тіла у зворотному напрямку до середини труби за час подачі струму з подальшим перетворенням кінетичної енергії руху тіла по каналу труби в енергію електромагнітних коливань наступне і наступне переміщення тіла у зазначеному зворотному напрямку по каналу труби за її середину за допомогою кінетичної енергії руху, а електромагнітні коливання створюються періодичною подачею електричного струму Пподібного імпульсу на першій та другий соленоїди з величиною зазначеного імпульсу, що триває до моменту перетинання тілом середини труби, і у який системою управління здійснюється переключення блоків керування, полягає в тому, що попередньо розміщують в середині тіла джерело внутрішньої енергії, перед початком руху тіла по каналу тр уби здійснюють накопичення джерелом внутрішньої енергії, що розміщене в тілі, вн утрішньої електромагнітної енергії, доводять накопичення енергії до рівня максимальної взаємодії магнітних полів соленоїдів і тіла, забезпечують прискорення тіла та збільшення характеристик випромінювання шляхом додавання та взаємодії магнітного поля електричного струму, що протікає в джерелі внутрішньої електромагнітної енергії зазначеного тіла з магнітним полем, яке створюється на обмотках соленоїдів та випромінюється через них в процесі руху тіла по каналу труби у той чи інший бік відносно середини труби, а електромагнітні коливання створюються періодично в моменти руху прискореного тіла з джерелом внутрішньою електромагнітною енергією по каналу труби, завдяки створенню електромагнітного поля електричним струмом, що протікає в джерелі внутрішньої електромагнітної енергії, та випромінюванню через обмотки соленоїдів. Суть корисної моделі полягає і в тому, що соленоїди встановлюються симетрично відносно середини труби і так, що їх котушки мають зустрічну намотку, соленоїди розміщуються по всій довжині труби і мають однакові характеристики. Суть корисної моделі полягає також і в тому, що джерело внутрішньої енергії розміщують в тілі переважно в його центральній частині, тіло виготовляють у вигляді резонатора-накопичувача електромагнітної енергії, а струм, який протікає в першому соленоїді, є, відповідно, протилежним за напрямком щодо струм у, який протікає у другому соленоїді. 7 30737 Порівняльний аналіз технічного рішення з прототипом, дозволяє зробити висновок, що спосіб отримання електромагнітних коливань при зміні положення, що володіє внутрішньою електромагнітною енергією, який заявляється, відрізняється тим, що попередньо розміщують в середині тіла джерело внутрішньої енергії, перед початком руху тіла по каналу тр уби здійснюють накопичення джерелом внутрішньої енергії, що розміщене в тілі, внутрішньої електромагнітної енергії, доводять накопичення енергії до рівня максимальної взаємодії магнітних полів соленоїдів і тіла, забезпечують прискорення тіла та збільшення характеристик випромінювання шляхом додавання та взаємодії магнітного поля електричного струму, що протікає в джерелі внутрішньої електромагнітної енергії зазначеного тіла з магнітним полем, яке створюється на обмотках соленоїдів та випромінюється через них в процесі руху тіла по каналу труби у той чи інший бік відносно середини труби, а електромагнітні коливання створюються періодично в моменти руху прискореного тіла з джерелом внутрішньою електромагнітною енергією по каналу труби, завдяки створенню електромагнітного поля електричним струмом, що протікає в джерелі внутрішньої електромагнітної енергії, та випромінюванню через обмотки соленоїдів, при цьому соленоїди встановлюються симетрично відносно середини труби і так, що їх котушки мають зустрічну намотку, соленоїди розміщуються по всій довжині труби і мають однакові характеристики, причому джерело внутрішньої енергії розміщують в тілі переважно в його центральній частині, тіло виготовляють у вигляді резонатора-накопичувача електромагнітної енергії, а струм, який протікає в першому соленоїді, є, відповідно, протилежним за напрямком щодо струму, який протікає у другому соленоїді. Суть корисної моделі пояснюється за допомогою ілюстрації, де на Фіг.1 представлена блок-схема виконання способу отримання електромагнітних коливань при зміні положення тіла, що володіє внутрішньою електромагнітною енергією, який заявляється, де на Фіг.2 показана конструктивна схема пристрою, за допомогою якого здійснюється спосіб отримання електромагнітних коливань при зміні положення тіла, що володіє внутрішньою електромагнітною енергією, який заявляється. Для здійснення способу отримання електромагнітних коливань при зміні положення тіла, що володіє внутрішньою електромагнітною енергією, підготовлюють обладнання (як варіант конструктивного виконання): підготовлюють стволоподібну трубу 1 і встановлюють на зазначену стволоподібну трубу 1 осесиметрично поздовжньої осі 2 зазначеної труби 1 перший соленоїд 3, який має свою зовнішню систему накопичення електромагнітної енергії 4 та блок керування 5; встановлюють на стволоподібну трубу 1 осесиметрично поздовжньої осі 2 зазначеної труби 1 др угий соленоїд 6, який має свою зовнішню систему накопичення електромагнітної енергії 7 та блок керування 8; 8 управління блоками керування відбувається системою управління 9, яку з'єднують, відповідно, з першим блоком керування 5 та з другим блоком керування 8. Для здійснення зазначеного способу в середину стволоподібної труби 1 вставляють тіло 10, що призначене для пересування по каналу 11 стволоподібної труби 1, а в середині тіла 10 конструктивно розміщують джерело внутрішньої енергії 12 (див. Фіг.2). Реалізація способу отримання електромагнітних коливань при зміні положення тіла, що володіє внутрішньою електромагнітною енергією, здійснюється за допомогою вищезазначеного пристрою (див. Фіг.2) таким чином (див. блок-схему на Фіг.1). Попередньо підготовлюють стволоподібну трубу 1 та тіло 10, що призначене для пересування по каналу 11 труби 1, при цьому тіло 10 виготовляють у вигляді резонаторанакопичувача електромагнітної енергії. Далі здійснюють технологічні операції, згідно з якими встановлюють на стволоподібну тр убу 1 осесиметрично поздовжньої осі зазначеної труби 1 два соленоїда (позиції 3 і 6), кожний з яких має свою зовнішню систему (відповідно, позиції 4 і 7) накопичення електромагнітної енергії та блоки керування (відповідно, позиції 5 і 8), управління якими відбувається системою управління 9 (див. Фіг.2), при цьому соленоїди (позиції 3 і 6) встановлюються симетрично відносно середини труби 1 і так, що їх котушки мають зустрічну намотку, причому зазначені соленоїди (позиції 3 і 6) розміщуються по всій довжині труби 1 (див. Фіг.2) і мають однакові характеристики. Після цього (або водночас) розміщують в середині тіла 10 джерело 12 внутрішньої енергії, при цьому джерело 12 внутрішньої енергії розміщують в тілі 10 переважно в його центральній частині (при цьому можливі варіанти розміщення джерела 12 внутрішньої енергії у любій іншій точці тіла 10). По закінченню технологічних операцій щодо розміщення в середині тіла 10 джерела 12 внутрішньої енергії, вставляють в середину труби 1 тіло 10, що призначене для пересування по каналу 11 тр уби 1, із розміщеним попередньо в тілі 10 джерелом 12 внутрішньої енергії (див. Фіг.2). Продовжують технологічний цикл виконання операцій, що становлять суть способу отримання електромагнітних коливань при зміні положення тіла, що володіє внутрішньою електромагнітною енергією, тим, що проводять заряджання зовнішніх систем (відповідно, позиції 4 і 7) накопичення електромагнітної енергії. Також здійснюють накопичення джерелом 12 внутрішньої енергії, що розміщене в тілі 10, внутрішньої електромагнітної енергії. Далі доводять накопичення енергії до рівня максимальної взаємодії магнітних полів соленоїдів (позиції 3 і 6) і тіла 10. Продовжують технологічний цикл виконання операцій, що становлять суть способу отримання електромагнітних коливань при зміні положення тіла, що володіє внутрішньою електромагнітною енергією, тим, що подають управляючий сигнал з 9 30737 системи 9 управління на перший блок керування 5 (див. Фіг.2). Далі подають за допомогою першого блока керування 5 електричний струм зазначеної величини з першої системи 4 накопичення електромагнітної енергії на перший соленоїд 3, при цьому струм, який протікає в першому соленоїді 3, є, відповідно, протилежним за напрямком щодо другого соленоїда 6. Створюють першим соленоїдом 3 електромагнітне поле на час протікання електричного струму. При цьому забезпечують на час протікання електричного струму рух тіла 10 до середини труби 1 з подальшим перетворенням кінетичної енергії руху тіла 10 по каналу 11 труби 1 в енергію електромагнітних коливань та наступне переміщення тіла 10 по каналу 11 труби 1 за її середину за допомогою кінетичної енергії руху. Водночас забезпечують прискорення тіла 10 та збільшення характеристик випромінювання шляхом додавання та взаємодії магнітного поля електричного струму, що протікає в джерелі 12 внутрішньої електромагнітної енергії зазначеного тіла 10 з магнітним полем, яке створюється на обмотках соленоїдів (а саме, в обмотках соленоїда 3) та випромінюється через них в процесі руху тіла 10 по каналу 11 труби 1. Після проходу тілом 10 середини труби 1 відключають за допомогою системи 9 управління перший блок керування 5 першого соленоїду 3, що призупиняє подачу електричного струму на перший соленоїд 3. Здійснюють за допомогою системи 9 управління переключення системи на другий блок керування 8 та подають управляючий сигнал з системи 9 управління на зазначений другий блок керування 8 (див. Фіг.2). Вводять в дію за допомогою управляючого сигналу з системи 9 управління другий блок керування 8 (див. Фіг.2). Далі подають за допомогою другого блока керування 8 електричний струм зазначеної величини з другої системи 7 накопичення електромагнітної енергії на другий соленоїд 6 (див. Фіг.2). При цьому створюють другим соленоїдом 6 електромагнітне поле і забезпечують рух тіла 10 у зворотному напрямку до середини труби 1 за час подачі струму з подальшим перетворенням кінетичної енергії руху тіла 10 по каналу 11 тр уби 1 в енергію електромагнітних коливань і наступне переміщення тіла 10 у зазначеному зворотному напрямку по каналу 11 труби 1 за її середину за допомогою кінетичної енергії руху. Водночас забезпечують у зворотному напрямку прискорення тіла 10 та збільшення характеристик випромінювання шляхом додавання та взаємодії магнітного поля електричного струму, що протікає в джерелі 12 внутрішньої електромагнітної енергії зазначеного тіла 10, з магнітним полем, яке створюється на обмотках соленоїдів (а саме, в обмотці соленоїда 6) та випромінюється через них в процесі руху тіла 10 10 по каналу 11 труби 1 у зазначений зворотний бік відносно середини труби 1 (див. Фіг.2). В усіх випадках електромагнітні коливання створюються періодичною подачею електричного струму П-подібного імпульсу на першій (позиція 3) та другий (позиція 6) соленоїди з величиною зазначеного імпульсу, що триває до моменту перетинання тілом 10 середини труби 1, і у який системою 9 управління здійснюється переключення блоків керування (відповідно, позиції 5 і 8) (див. Фіг.2). Також в усіх випадках електромагнітні коливання створюються періодично в моменти руху прискореного тіла 10 з джерелом 12 внутрішньої електромагнітної енергії по каналу 11 труби 1, завдяки створенню електромагнітного поля електричним струмом, що протікає в джерелі 12 внутрішньої електромагнітної енергії, та випромінюванню через обмотки соленоїдів (першого (позиція 3) та другого (позиція 6) соленоїдів). Для математичного опису способу отримання електромагнітних коливань при зміні положення тіла, що володіє внутрішньою електромагнітною енергією, скористаємося способом індукційного прискорення тіла 10 з джерелом 12 внутрішньої енергії, що розміщене у зазначеному тілі 10 (див. Фіг.2). Система диференціальних рівнянь для струмів у контура х першого (позиція 3) та другого (позиція 6) соленоїдів і тіла 10, що володіє джерелом 12 внутрішньої енергії записана наступним чином: i1R 1 + L 1 t di 1 + dt C1 ò i dt + dt (Mi di 1 + dt C2 ò i dt + dt (Mi di òi i2 R2 + L 2 i mR m + L m dt + 1 Cm d 1 m) = e 1, (1) m) = e 2, (2) ( Mi 1,2 ) = e m. (3) 0 t d 2 0 t 0 m dt + d dt Прискорення тіла (позиція 10) із джерелом (позиція 12) внутрішньої енергії описується рівнянням руху d2 x 1 dM (4) i i , m 1,2 m dx dt а індуктивний зв'язок між першим (позиція 3) і другим (позиція 6) соленоїдів та тілом (позиція 10) із джерелом (позиція 12) внутрішньої енергії рівнянням взаємної індукції [3] 2 = éæ 2 2 ù ö M = m 0 r1,2 rm êç - k ÷K - Eú, k û èk ø ë (5) де k - модуль еліптичних інтегралів, величина якого дорівнює 4r1, 2 rm k2 = , (r1,2 + rm )2 + x 2 і1.2; L1,2; С 1,2 ; R1,2 і r 1,2 - стр ум, індуктивність, ємність, активний опір і радіус проводу намоткии першого і другого соленоїдів відповідно; 11 30737 12 im, Lm, C m, Rm і rm - стр ум, індуктивність, ємність, активний опір і радіус тіла із джерелом внутрішньої енергії; К - еліптичний інтеграл першого роду; Е - еліптичний інтеграл другого роду; х - координата тіла із джерелом внутрішньої енергії; t - час. Оскільки e 1,2 = EM1,2cos (w1,2 t + j1,2 ) та e m = EMm cos (wm t + jm ) , то продиференціювавши по t рівняння (1, 2) і (3) одержимо систему рівнянь L 1,2 Lm d 2i1,2 dt d2 i m dt 2 2 + R 12 , + Rm di12 , dt + 1 di i = E M1,2 cos(w1,2 t + j1,2 ) - M m , C 1,2 1,2 dt di 1,2 di m 1 + i m = E M m cos(w m t + jm ) - M , dt Cm dt які являють собою нелінійні диференціальні рівняння другого порядку. Індекс "1" і "2" відповідає контур у першого і другого соленоїдів відповідно, а індекс "m" контуру тіла із джерелом внутрішньої енергії. Система рівнянь (4) - (7) являє собою математичну модель процесу індукційного прискорення. Підвищення ефективності застосування способу отримання електромагнітних коливань при зміні положення тіла, що володіє внутрішньою електромагнітною енергією, який заявляється, у порівнянні з прототипом, досягається за рахунок створення електромагнітного поля електричним струмом, що протікає в джерелі внутрішньої електромагнітної енергії, та випромінюванню через обмотки соленоїдів, і, як наслідок, прискорення цього тіла. Джерела інформації 1. Порошин С.М. «Наземне маловысотные радиолокаторы наведения». Харьков, Издательство «Майдан», 1997, стр. 137-144 аналог. 2. В.В. Рождественский, Н.И. Фенченко, А.Б. Филонов, И.Н. Шипицын, М.Я. Юртаев «Оператор радиолокационной станции», Учебное пособие. М.: Издательство ДОССАФ СССР, 1987, стр. 61-62 - прототип. 3. Ма шталир В.В. Математическая модель электродинамического ускорения проводящего тела. Збірник наукових праць Житомирського військового інституту радіоелектроніки ім. С.П. Корольова. - Житомир: ЖВІРЕ. - Вип. 11. - 264с. (6) (7) 13 30737 14
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of creation of electromagnetic vibrations at change of position of body, which has internal electromagnetic energy
Автори англійськоюVasylenko Oleksandr Vasyliovych, Mashtalir Vadym Vitaliiovych, Husak Yurii Arkadiiovych, Lapytskyi Serhii Volodymyrovych, Komarov Volodymyr Oleksandrovych, Sendetskyi Mykola Mykolaovych
Назва патенту російськоюСпособ получения электромагнитных колебаний при изменении положения тела, которое имеет внутреннюю электромагнитную энергию
Автори російськоюВасиленко Александр Васильевич, Машталир Вадим Витальевич, Гусак Юрий Аркадьевич, Лапицкий Сергей Владимирович, Комаров Владимир Александрович, Сендецкий Николай Николаевич
МПК / Мітки
МПК: H02J 17/00, B06B 1/00
Мітки: має, отримання, коливань, внутрішню, енергію, зміни, електромагнітних, спосіб, положення, тіла, електромагнітну
Код посилання
<a href="https://ua.patents.su/7-30737-sposib-otrimannya-elektromagnitnikh-kolivan-pri-zmini-polozhennya-tila-shho-maeh-vnutrishnyu-elektromagnitnu-energiyu.html" target="_blank" rel="follow" title="База патентів України">Спосіб отримання електромагнітних коливань при зміні положення тіла, що має внутрішню електромагнітну енергію</a>
Спосіб перетворення енергії гравітаційного поля в механічну енергію обертання та теплову енергію робочого тіла
Номер патенту: 24369
Опубліковано: 25.06.2007
Автори: Савченко Борис Степанович, Заїка Юрій Володимирович
МПК: F03G 7/06
Мітки: енергію, поля, тіла, спосіб, обертання, енергії, перетворення, гравітаційного, механічну, теплову, робочого
Формула / Реферат:
1. Спосіб перетворення енергії гравітаційного поля в механічну енергію обертання та теплову енергію робочого тіла, що включає використання енергії обертання в розрідженому середовищі ротора з радіальним отвором, виконавчими соплами та робочого тіла в умовах дії відцентрової сили, спрямування робочого тіла окремими потоками від осі обертання, який відрізняється тим, що в ємність з входом та виходом, заповнену робочим тілом, встановлюють ротор...
Спосіб термічної стабілізації газоподібного робочого тіла в процесі зміни його параметрів при контурній деформації (зміні об’єму)
Номер патенту: 47484
Опубліковано: 15.07.2002
Автор: Дологлонян Андрій Вартазарович
МПК: F01P 9/00, F02G 1/00, F04B 31/00, F01B 31/00, F02G 5/00
Мітки: контурній, робочого, об'єму, деформації, тіла, термічної, стабілізації, газоподібного, спосіб, зміни, параметрів, процесі
Формула / Реферат:
Спосіб термічної стабілізації газоподібного робочого тіла у процесі зміни його параметрів при контурній деформації (зміні об'єму) шляхом відводу (підведення) теплоти у процесі зміни об'єму, який відрізняється тим, що робоче тіло в процесі контурної деформації вилучають з робочого об'єму, пропускають через контур термічної стабілізації (систему охолодження або підігріву) і повертають знову до робочого об'єму.
Спосіб безпосереднього перетворення енергії електромагнітних хвиль оптичного діапазону в енергію електричного струму
Номер патенту: 33080
Опубліковано: 15.02.2001
Автор: Стецович Віктор Іванович
МПК: H02N 6/00
Мітки: електромагнітних, діапазону, енергії, енергію, перетворення, безпосереднього, струму, електричного, спосіб, оптичного, хвиль
Текст:
...поляризованості молекули (чи, іншими словами, фазові співвідношення між інтерферуючими ЕМХ). Звідси випливають наступні механізми реалізації запропонованого способу. 1. Однорідність середовища означає сталу кількість молекул, атомів, вільних електронів в однакових малих об"ємах, в яких під дією ЕМХ індукуються однаков і електричні моменти, зміна яких у часі веде до випромінювання когерентних вторинних хвиль однакової амплітуди. Якщо в...
Спосіб визначення зміни внесків структурного та температурного розупорядкування в урбахівську енергію твердого кристалічного тіла при фазовому переході другого роду
Номер патенту: 25921
Опубліковано: 27.08.2007
Автор: Студеняк Ігор Петрович
МПК: G01K 17/08
Мітки: зміни, урбахівську, фазовому, твердого, температурного, структурного, внесків, переході, роду, тіла, спосіб, другого, енергію, кристалічного, визначення, розупорядкування
Формула / Реферат:
Спосіб визначення зміни внесків структурного та температурного розупорядкування в урбахівську енергію твердого кристалічного тіла при фазовому переході другого роду, що включає визначення внесків температурного та структурного розупорядкування шляхом температурних досліджень краю оптичного поглинання твердих тіл, який відрізняється тим, що додатково визначають урбахівську енергію
Спосіб і пристрій для визначення положення видовженого об’єкта відносно поверхні тіла-перепони за допомогою електромагнітного випромінювання
Номер патенту: 69402
Опубліковано: 15.09.2004
Автори: Бруун Ніколай, Обое Єнсен Томас, Лундгрен Ян, Теллєр Стеен
МПК: G01S 17/06, B23K 26/02, G01B 15/00, B23K 26/04, G01B 11/00
Мітки: спосіб, тіла-перепони, визначення, пристрій, положення, об'єкта, допомогою, відносної, випромінювання, видовженого, електромагнітного, поверхні
Формула / Реферат:
1. Спосіб визначення положення видовженого, порівняно вузького об'єкта відносно поверхні переважно дископодібного тіла-перепони, розміщеного перед згаданим об'єктом і орієнтованого під кутом до нього, за допомогою електромагнітного випромінювання, зокрема іонізувального випромінювання, для керування переміщенням з'єднаного з ним устаткування для обробки, зокрема для лазерного зварювання, який відрізняється тим, що зі сторони тіла-перепони,...
Попередній патент: Грохот для збезводнювання шламів
Наступний патент: Спосіб приготування палива для двигуна внутрішнього згорання
Випадковий патент: Спосіб виготовлення багатошарової ізоляції обмоток електричних машин