Спосіб демпферування імпульсних динамічних навантажень, переважно у виробах з циклічним режимом роботи та пристрій для його реалізації
Номер патенту: 34011
Опубліковано: 15.02.2001
Текст
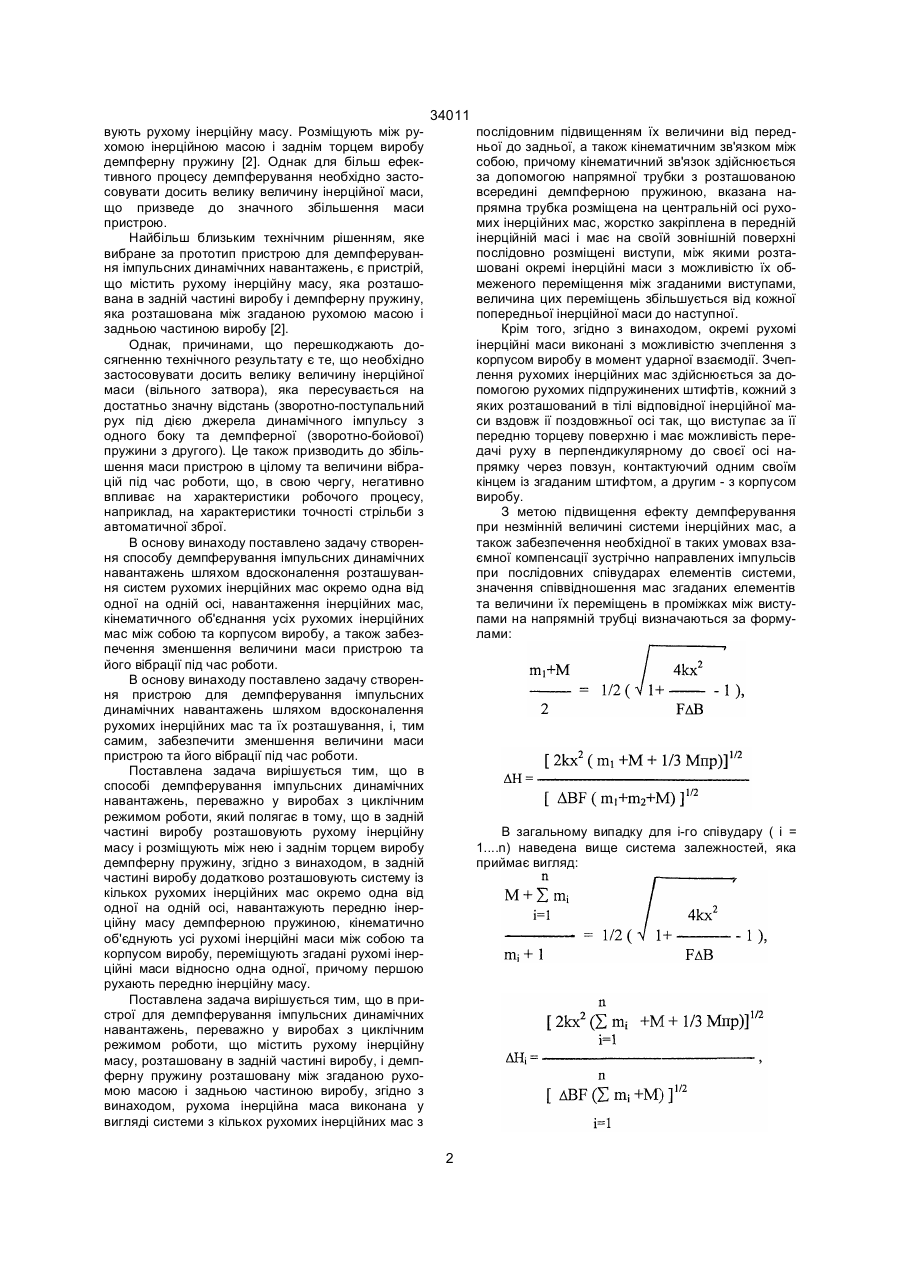
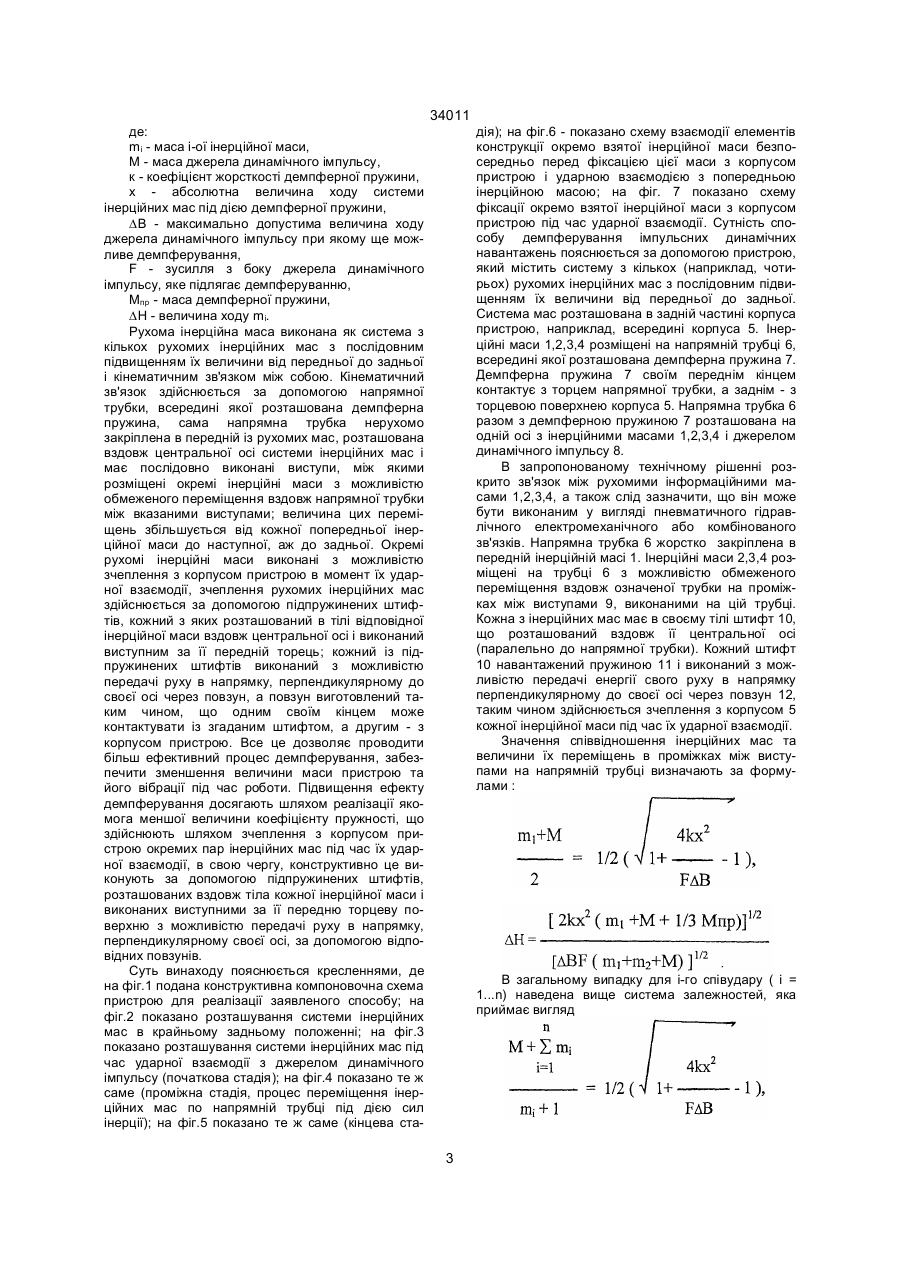
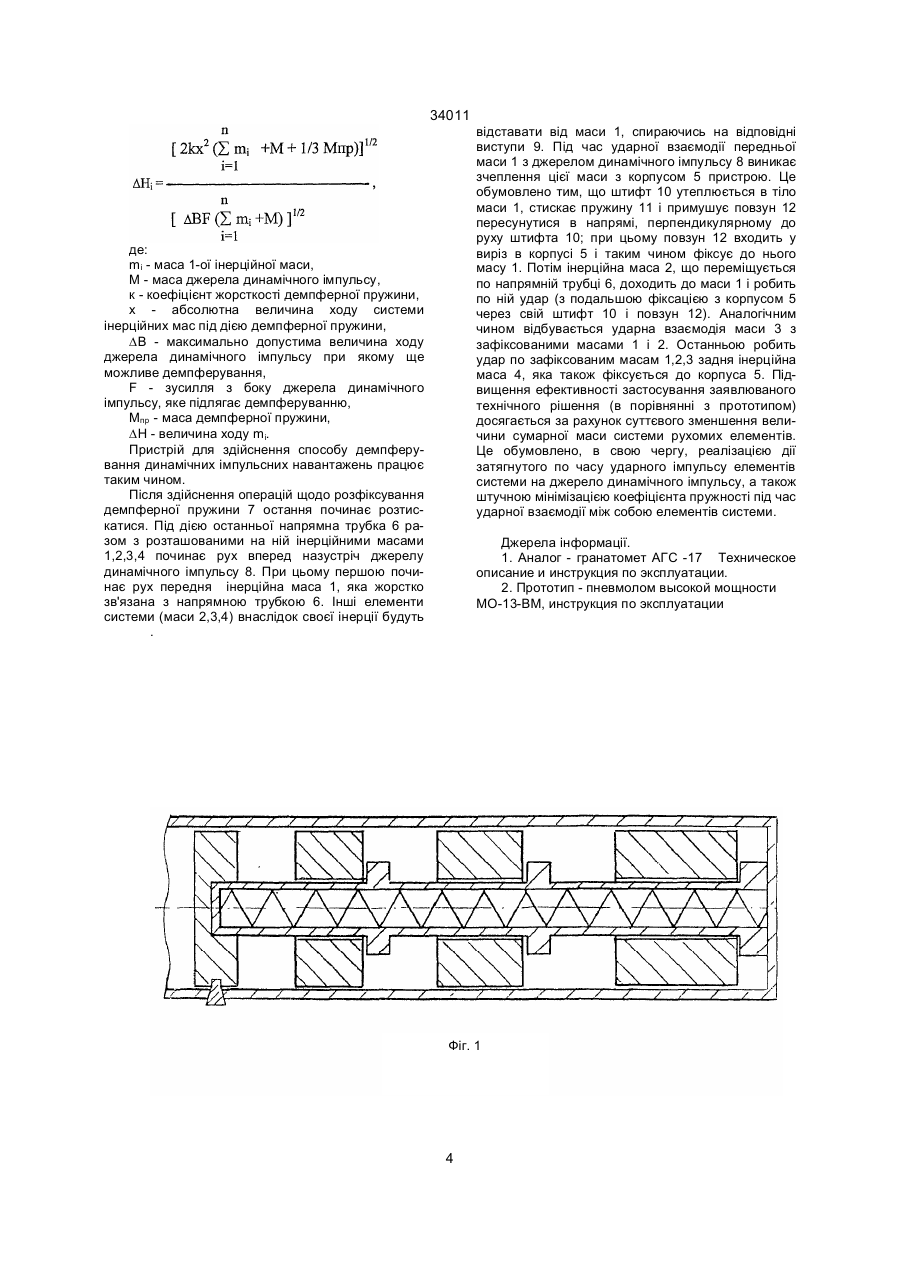
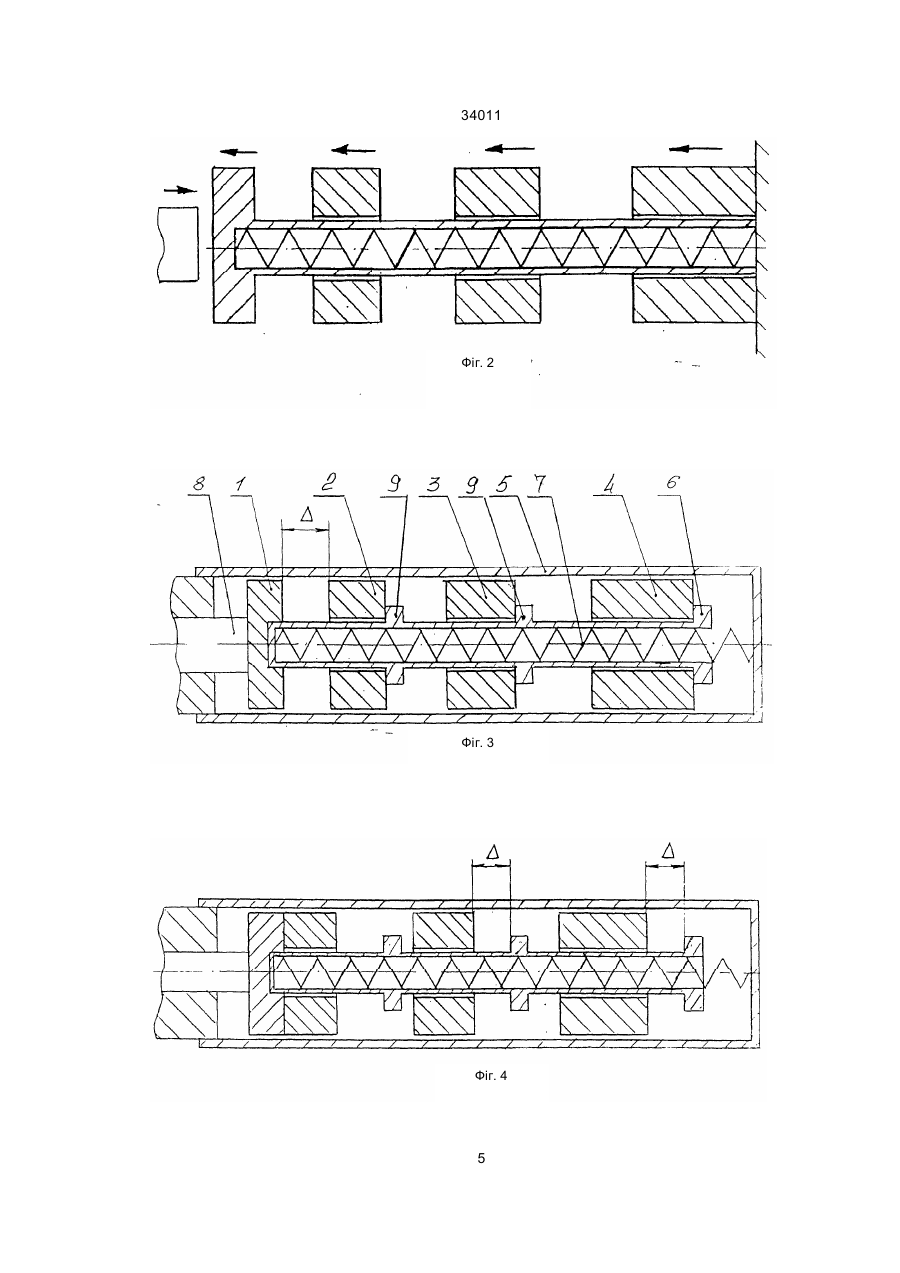
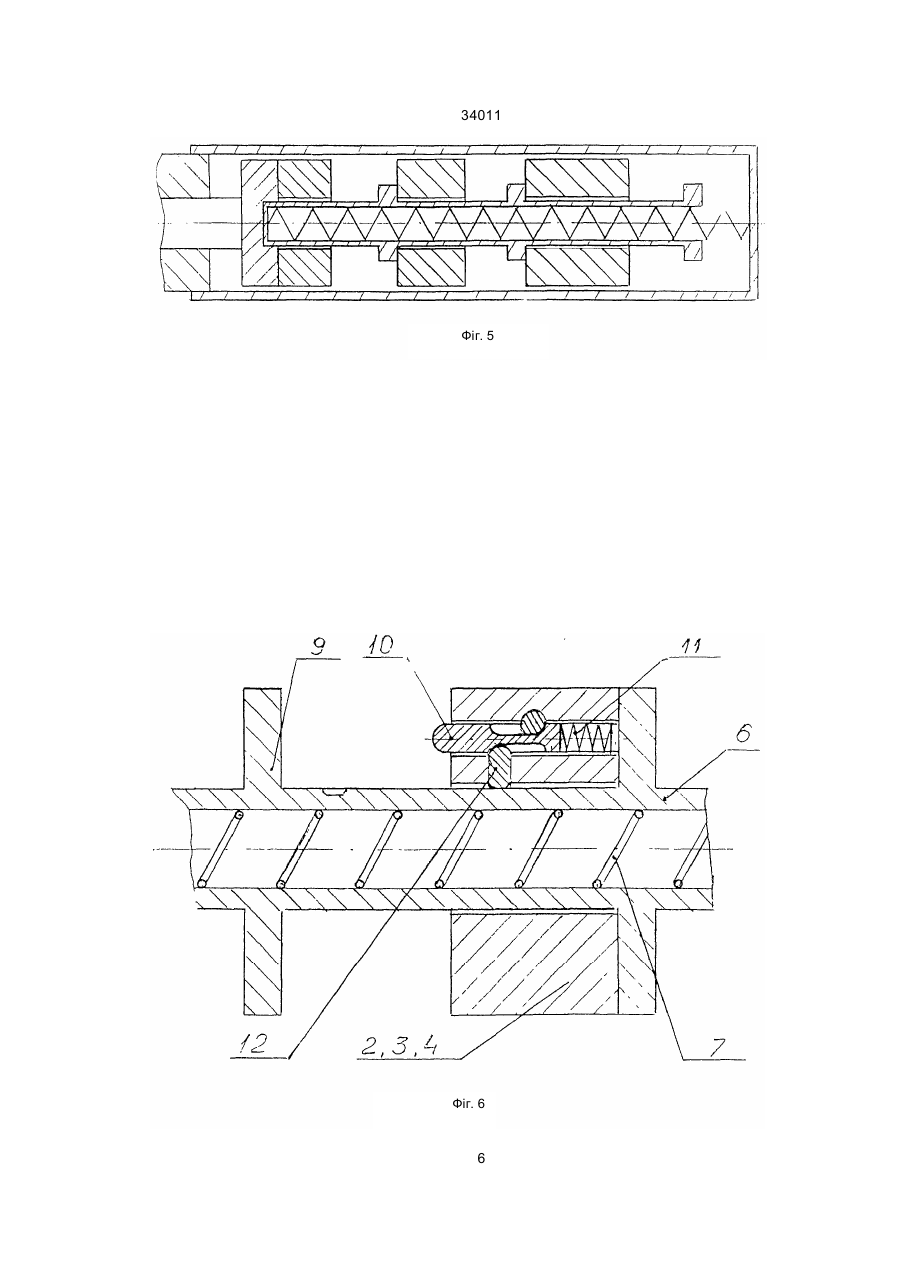
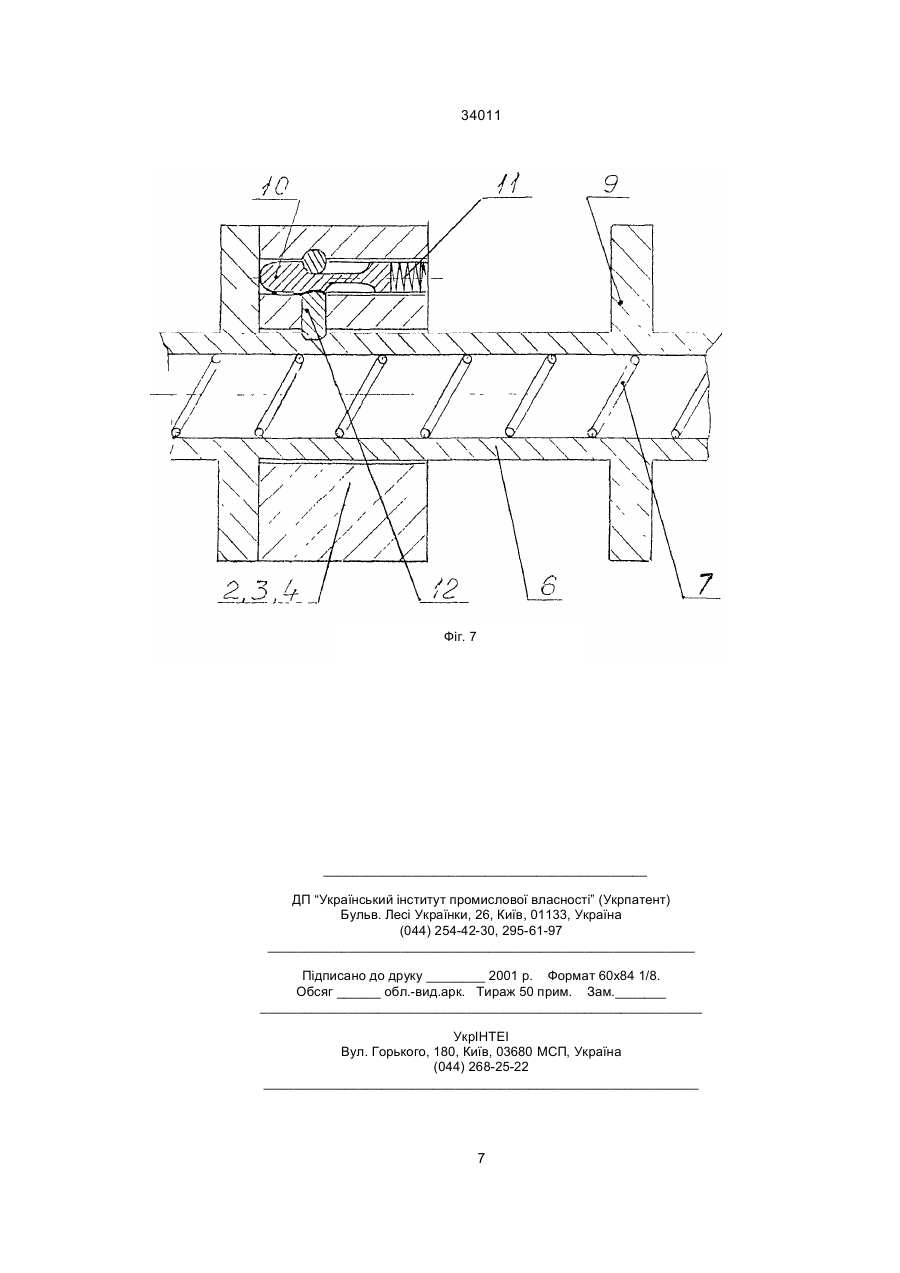
1. Спосіб демпферування імпульсних динамічних навантажень, переважно у виробах з циклічним режимом роботи, полягає в тому, що в задній частині виробу розташовують рухому інерційну масу і розміщують між нею і заднім торцем виробу демпферну пружину, який відрізняється тим, що в задній частині виробу додатково розташовують систему із кількох рухомих інерційних мас окремо одна від одної на одній осі, навантажують передню інерційну масу демпферною пружиною, кінематично об'єднують усі рухомі інерційні маси між собою та корпусом виробу, переміщують згадані рухомі інерційні маси відносно одна одної, причому першою рухають передню інерційну масу. 2. Пристрій для демпферування імпульсних динамічних навантажень, переважно у виробах з циклічним режимом роботи, що містить рухому інерційну масу, розташовану в задній частині виробу, і демпферну пружину, розташовану між згаданою рухомою масою і задньою частиною виробу, який відрізняється тим, що рухома інерційна маса виконана у вигляді системи з кількох рухомих A (54) СПОСІБ ДЕМПФЕРУВАННЯ ІМПУЛЬСНИХ ДИНАМІЧНИХ НАВАНТАЖЕНЬ, ПЕРЕВАЖНО У ВИРОБАХ З ЦИКЛІЧНИМ РЕЖИМОМ РОБОТИ ТА ПРИСТРІЙ ДЛЯ ЙОГО РЕАЛІЗАЦІЇ 34011 послідовним підвищенням їх величини від передньої до задньої, а також кінематичним зв'язком між собою, причому кінематичний зв'язок здійснюється за допомогою напрямної трубки з розташованою всередині демпферною пружиною, вказана напрямна трубка розміщена на центральній осі рухомих інерційних мас, жорстко закріплена в передній інерційній масі і має на своїй зовнішній поверхні послідовно розміщені виступи, між якими розташовані окремі інерційні маси з можливістю їх обмеженого переміщення між згаданими виступами, величина цих переміщень збільшується від кожної попередньої інерційної маси до наступної. Крім того, згідно з винаходом, окремі рухомі інерційні маси виконані з можливістю зчеплення з корпусом виробу в момент ударної взаємодії. Зчеплення рухомих інерційних мас здійснюється за допомогою рухомих підпружинених штифтів, кожний з яких розташований в тілі відповідної інерційної маси вздовж ії поздовжньої осі так, що виступає за її передню торцеву поверхню і має можливість передачі руху в перпендикулярному до своєї осі напрямку через повзун, контактуючий одним своїм кінцем із згаданим штифтом, а другим - з корпусом виробу. З метою підвищення ефекту демпферування при незмінній величині системи інерційних мас, а також забезпечення необхідної в таких умовах взаємної компенсації зустрічно направлених імпульсів при послідовних співударах елементів системи, значення співвідношення мас згаданих елементів та величини їх переміщень в проміжках між виступами на напрямній трубці визначаються за формулами: вують рухому інерційну масу. Розміщують між рухомою інерційною масою і заднім торцем виробу демпферну пружину [2]. Однак для більш ефективного процесу демпферування необхідно застосовувати досить велику величину інерційної маси, що призведе до значного збільшення маси пристрою. Найбільш близьким технічним рішенням, яке вибране за прототип пристрою для демпферування імпульсних динамічних навантажень, є пристрій, що містить рухому інерційну масу, яка розташована в задній частині виробу і демпферну пружину, яка розташована між згаданою рухомою масою і задньою частиною виробу [2]. Однак, причинами, що перешкоджають досягненню технічного результату є те, що необхідно застосовувати досить велику величину інерційної маси (вільного затвора), яка пересувається на достатньо значну відстань (зворотно-поступальний рух під дією джерела динамічного імпульсу з одного боку та демпферної (зворотно-бойової) пружини з другого). Це також призводить до збільшення маси пристрою в цілому та величини вібрацій під час роботи, що, в свою чергу, негативно впливає на характеристики робочого процесу, наприклад, на характеристики точності стрільби з автоматичної зброї. В основу винаходу поставлено задачу створення способу демпферування імпульсних динамічних навантажень шляхом вдосконалення розташування систем рухомих інерційних мас окремо одна від одної на одній осі, навантаження інерційних мас, кінематичного об'єднання усіх рухомих інерційних мас між собою та корпусом виробу, а також забезпечення зменшення величини маси пристрою та його вібрації під час роботи. В основу винаходу поставлено задачу створення пристрою для демпферування імпульсних динамічних навантажень шляхом вдосконалення рухомих інерційних мас та їх розташування, і, тим самим, забезпечити зменшення величини маси пристрою та його вібрації під час роботи. Поставлена задача вирішується тим, що в способі демпферування імпульсних динамічних навантажень, переважно у виробах з циклічним режимом роботи, який полягає в тому, що в задній частині виробу розташовують рухому інерційну масу і розміщують між нею і заднім торцем виробу демпферну пружину, згідно з винаходом, в задній частині виробу додатково розташовують систему із кількох рухомих інерційних мас окремо одна від одної на одній осі, навантажують передню інерційну масу демпферною пружиною, кінематично об'єднують усі рухомі інерційні маси між собою та корпусом виробу, переміщують згадані рухомі інерційні маси відносно одна одної, причому першою рухають передню інерційну масу. Поставлена задача вирішується тим, що в пристрої для демпферування імпульсних динамічних навантажень, переважно у виробах з циклічним режимом роботи, що містить рухому інерційну масу, розташовану в задній частині виробу, і демпферну пружину розташовану між згаданою рухомою масою і задньою частиною виробу, згідно з винаходом, рухома інерційна маса виконана у вигляді системи з кількох рухомих інерційних мас з В загальному випадку для і-го співудару ( і = 1....n) наведена вище система залежностей, яка приймає вигляд: 2 34011 дія); на фіг.6 - показано схему взаємодії елементів конструкції окремо взятої інерційної маси безпосередньо перед фіксацією цієї маси з корпусом пристрою і ударною взаємодією з попередньою інерційною масою; на фіг. 7 показано схему фіксації окремо взятої інерційної маси з корпусом пристрою під час ударної взаємодії. Сутність способу демпферування імпульсних динамічних навантажень пояснюється за допомогою пристрою, який містить систему з кількох (наприклад, чотирьох) рухомих інерційних мас з послідовним підвищенням їх величини від передньої до задньої. Система мас розташована в задній частині корпуса пристрою, наприклад, всередині корпуса 5. Інерційні маси 1,2,3,4 розміщені на напрямній трубці 6, всередині якої розташована демпферна пружина 7. Демпферна пружина 7 своїм переднім кінцем контактує з торцем напрямної трубки, а заднім - з торцевою поверхнею корпуса 5. Напрямна трубка 6 разом з демпферною пружиною 7 розташована на одній осі з інерційними масами 1,2,3,4 і джерелом динамічного імпульсу 8. В запропонованому технічному рішенні розкрито зв'язок між рухомими інформаційними масами 1,2,3,4, а також слід зазначити, що він може бути виконаним у вигляді пневматичного гідравлічного електромеханічного або комбінованого зв'язків. Напрямна трубка 6 жорстко закріплена в передній інерційній масі 1. Інерційні маси 2,3,4 розміщені на трубці 6 з можливістю обмеженого переміщення вздовж означеної трубки на проміжках між виступами 9, виконаними на цій трубці. Кожна з інерційних мас має в своєму тілі штифт 10, що розташований вздовж її центральної осі (паралельно до напрямної трубки). Кожний штифт 10 навантажений пружиною 11 і виконаний з можливістю передачі енергії свого руху в напрямку перпендикулярному до своєї осі через повзун 12, таким чином здійснюється зчеплення з корпусом 5 кожної інерційної маси під час їх ударної взаємодії. Значення співвідношення інерційних мас та величини їх переміщень в проміжках між виступами на напрямній трубці визначають за формулами : де: m i - маса і-ої інерційної маси, М - маса джерела динамічного імпульсу, к - коефіцієнт жорсткості демпферної пружини, х - абсолютна величина ходу системи інерційних мас під дією демпферної пружини, DВ - максимально допустима величина ходу джерела динамічного імпульсу при якому ще можливе демпферування, F - зусилля з боку джерела динамічного імпульсу, яке підлягає демпферуванню, Мпр - маса демпферної пружини, DН - величина ходу mi. Рухома інерційна маса виконана як система з кількох рухомих інерційних мас з послідовним підвищенням їх величини від передньої до задньої і кінематичним зв'язком між собою. Кінематичний зв'язок здійснюється за допомогою напрямної трубки, всередині якої розташована демпферна пружина, сама напрямна трубка нерухомо закріплена в передній із рухомих мас, розташована вздовж центральної осі системи інерційних мас і має послідовно виконані виступи, між якими розміщені окремі інерційні маси з можливістю обмеженого переміщення вздовж напрямної трубки між вказаними виступами; величина цих переміщень збільшується від кожної попередньої інерційної маси до наступної, аж до задньої. Окремі рухомі інерційні маси виконані з можливістю зчеплення з корпусом пристрою в момент їх ударної взаємодії, зчеплення рухомих інерційних мас здійснюється за допомогою підпружинених штифтів, кожний з яких розташований в тілі відповідної інерційної маси вздовж центральної осі і виконаний виступним за її передній торець; кожний із підпружинених штифтів виконаний з можливістю передачі руху в напрямку, перпендикулярному до своєї осі через повзун, а повзун виготовлений таким чином, що одним своїм кінцем може контактувати із згаданим штифтом, а другим - з корпусом пристрою. Все це дозволяє проводити більш ефективний процес демпферування, забезпечити зменшення величини маси пристрою та його вібрації під час роботи. Підвищення ефекту демпферування досягають шляхом реалізації якомога меншої величини коефіцієнту пружності, що здійснюють шляхом зчеплення з корпусом пристрою окремих пар інерційних мас під час їх ударної взаємодії, в свою чергу, конструктивно це виконують за допомогою підпружинених штифтів, розташованих вздовж тіла кожної інерційної маси і виконаних виступними за її передню торцеву поверхню з можливістю передачі руху в напрямку, перпендикулярному своєї осі, за допомогою відповідних повзунів. Суть винаходу пояснюється кресленнями, де на фіг.1 подана конструктивна компоновочна схема пристрою для реалізації заявленого способу; на фіг.2 показано розташування системи інерційних мас в крайньому задньому положенні; на фіг.3 показано розташування системи інерційних мас під час ударної взаємодії з джерелом динамічного імпульсу (початкова стадія); на фіг.4 показано те ж саме (проміжна стадія, процес переміщення інерційних мас по напрямній трубці під дією сил інерції); на фіг.5 показано те ж саме (кінцева ста В загальному випадку для і-го співудару ( і = 1...n) наведена вище система залежностей, яка приймає вигляд 3 34011 відставати від маси 1, спираючись на відповідні виступи 9. Під час ударної взаємодії передньої маси 1 з джерелом динамічного імпульсу 8 виникає зчеплення цієї маси з корпусом 5 пристрою. Це обумовлено тим, що штифт 10 утеплюється в тіло маси 1, стискає пружину 11 і примушує повзун 12 пересунутися в напрямі, перпендикулярному до руху штифта 10; при цьому повзун 12 входить у виріз в корпусі 5 і таким чином фіксує до нього масу 1. Потім інерційна маса 2, що переміщується по напрямній трубці 6, доходить до маси 1 і робить по ній удар (з подальшою фіксацією з корпусом 5 через свій штифт 10 і повзун 12). Аналогічним чином відбувається ударна взаємодія маси 3 з зафіксованими масами 1 і 2. Останньою робить удар по зафіксованим масам 1,2,3 задня інерційна маса 4, яка також фіксується до корпуса 5. Підвищення ефективності застосування заявлюваного технічного рішення (в порівнянні з прототипом) досягається за рахунок суттєвого зменшення величини сумарної маси системи рухомих елементів. Це обумовлено, в свою чергу, реалізацією дії затягнутого по часу ударного імпульсу елементів системи на джерело динамічного імпульсу, а також штучною мінімізацією коефіцієнта пружності під час ударної взаємодії між собою елементів системи. де: m i - маса 1-ої інерційної маси, М - маса джерела динамічного імпульсу, к - коефіцієнт жорсткості демпферної пружини, х - абсолютна величина ходу системи інерційних мас під дією демпферної пружини, DВ - максимально допустима величина ходу джерела динамічного імпульсу при якому ще можливе демпферування, F - зусилля з боку джерела динамічного імпульсу, яке підлягає демпферуванню, Мпр - маса демпферної пружини, DН - величина ходу mi. Пристрій для здійснення способу демпферування динамічних імпульсних навантажень працює таким чином. Після здійснення операцій щодо розфіксування демпферної пружини 7 остання починає розтискатися. Під дією останньої напрямна трубка 6 разом з розташованими на ній інерційними масами 1,2,3,4 починає рух вперед назустріч джерелу динамічного імпульсу 8. При цьому першою починає рух передня інерційна маса 1, яка жорстко зв'язана з напрямною трубкою 6. Інші елементи системи (маси 2,3,4) внаслідок своєї інерції будуть . Джерела інформації. 1. Аналог - гранатомет АГС -17 Техническое описание и инструкция по эксплуатации. 2. Прототип - пневмолом высокой мощности МО-13-ВМ, инструкция по эксплуатации Фіг. 1 4 34011 Фіг. 2 Фіг. 3 Фіг. 4 5 34011 Фіг. 5 Фіг. 6 6 34011 Фіг. 7 ____________________________________________ ДП “Український інститут промислової власності” (Укрпатент) Бульв. Лесі Українки, 26, Київ, 01133, Україна (044) 254-42-30, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид.арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ Вул. Горького, 180, Київ, 03680 МСП, Україна (044) 268-25-22 ___________________________________________________________ 7
ДивитисяДодаткова інформація
Автори англійськоюAlekseienko Ihor Mykhailovych, Laznia Ihor Viktorovych
Автори російськоюАлексеенко Игорь Михайлович, Лазня Игорь Викторович
МПК / Мітки
МПК: F16F 15/00, F16F 7/00
Мітки: циклічним, пристрій, роботи, імпульсних, демпферування, реалізації, переважно, спосіб, динамічних, навантажень, режимом, виробах
Код посилання
<a href="https://ua.patents.su/7-34011-sposib-dempferuvannya-impulsnikh-dinamichnikh-navantazhen-perevazhno-u-virobakh-z-ciklichnim-rezhimom-roboti-ta-pristrijj-dlya-jjogo-realizaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб демпферування імпульсних динамічних навантажень, переважно у виробах з циклічним режимом роботи та пристрій для його реалізації</a>
Спосіб визначення механічних напруг у виробах з феромагнітних матеріалів та пристрій для його реалізації
Номер патенту: 17181
Опубліковано: 18.03.1997
Автори: Кульков Анатолій Миколайович, Яременко Михайло Андрійович, Мінаков Сергій Миколайович, Фомічов Сергій Костянтинович, Недосєка Анатолій Якович, Степаненко Олександр Іванович, Зарицький Сергій Петрович, Ланчаков Григорій Олександрович
МПК: G01L 1/12
Мітки: матеріалів, напруг, реалізації, механічних, феромагнітних, визначення, спосіб, виробах, пристрій
Формула / Реферат:
1. Способ определения механических напряжений в изделиях из ферромагнитных материалов, заключающийся в определении измеряемой величины сигнала путем фазочувствительного измерения сигнала, поданного на намагничивающий электромагнит преобразователя, установленного на контролируемое изделие, и снятого с измерительного электромагнита преобразователя преобразованного сигнала, и определении по значению измеряемой величины сигнала механических...
Спосіб нормалізації роботи шлунково-кишкового тракту та пристрій для його реалізації
Номер патенту: 10227
Опубліковано: 30.06.1997
Автор: Рибак Любомир Петрович
МПК: A61H 15/00, A61H 1/00, A61H 7/00
Мітки: роботи, реалізації, тракту, нормалізації, спосіб, шлунково-кишкового, пристрій
Формула / Реферат:
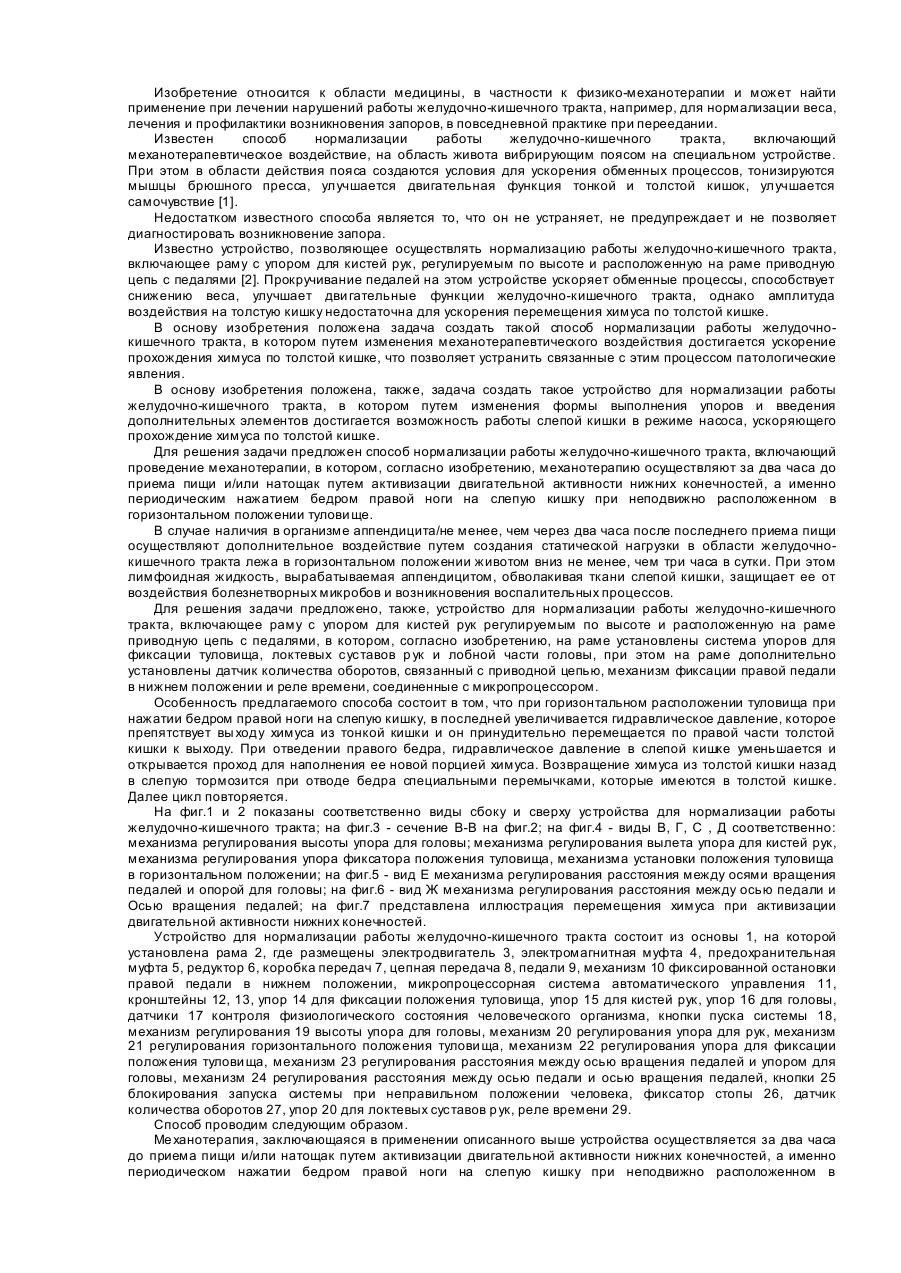
1. Способ нормализации работы желудочно-кишечного тракта, включающий проведение механотерапии, отличающийся тем, что механо-терапию осуществляют за два часа до приема пищи и/или натощак путем активизации двигательной активности нижних конечностей, а именно, периодическим нажатием бедром правой ноги на слепую кишку и в противофазе нажатием бедром левой ноги на область верхнего участка сигмовидной части толстой кишки при неподвижно...
Спосіб зміни вектора сили реакції в динамічних установках імпульсної дії
Номер патенту: 33840
Опубліковано: 15.02.2001
Автори: Лазня Ігор Вікторович, Алексеєнко Ігор Михайлович
МПК: F01B 11/00, F01D 11/00
Мітки: сили, зміни, спосіб, дії, вектора, динамічних, імпульсної, реакції, установках
Формула / Реферат:
Спосіб зміни вектора сили реакції в динамічних установках імпульсної дії який полягає в тому, що в корпусі установки розташовують рухомий елемент конструкції, забезпечують можливість його зворотно-поступального руху і кінематичне пов’язують його з іншими елементами таким чином, що вектори їх переміщень взаємно протилежно спрямовані, який відрізняється тим, що в динамічній установці імпульсної дії додатково розташовують систему рухомих...
Пристрій для управління режимом роботи електродугової установки
Номер патенту: 21208
Опубліковано: 16.10.2000
Автори: Гаврилюк Олександр Ілліч, Блінов Володимир Веніамінович, Неклеса Анатолій Тимофійович
МПК: H05B 7/18
Мітки: управління, пристрій, установки, електродугової, режимом, роботи
Формула / Реферат:
1. Устройство для управления режимом работы электродуговой установки с плазмотроном косвенного действия, содержащий выпрямитель, соединенный с регулируемым источником питания, подключенного к катоду и аноду плазмотро-на, источник плазмообразующего газа, отличающееся тем, что оно снабжено блоком управления пусковым режимом и возбуждения дугового разряда, выход которого посредством управляющих контактов автоматических катушек, снабженных...
Спосіб одержання шаруватого композитного матеріалу для захисту від динамічних навантажень
Номер патенту: 27583
Опубліковано: 15.09.2000
Автори: ДЕРЕЧА Олександр Якович, Пап Петро Аркадійович, ТРИГУБ Микола Петрович, Патон Борис Євгенович, Жук Генадій Віліорович
МПК: B22D 23/00, B22F 7/02, B22F 7/00
Мітки: одержання, спосіб, захисту, композитного, матеріалу, шаруватого, динамічних, навантажень
Формула / Реферат:
1. Способ получения композиционного материала для защиты от динамических нагрузок, включающий подачу предварительно нагретой первой составляющей композиционного материала, нанесение на нее слоя последующей составляющей путем осаждения потока диспергированного расплава и проплавление последующей составляющей на всю толщину нанесенного слоя, отличающийся тем, что подают на поверхность первой составляющей перед нанесением последующей...
Попередній патент: Колесо транспортного засобу
Наступний патент: Спосіб одержання пектину
Випадковий патент: Активна віброізоляція молотів