Прилад для вимірювань в`язкості
Номер патенту: 36136
Опубліковано: 10.10.2008
Автори: Зайківський Олександр Болеславович, Воробйов Віталій Іванович, Петрашова Ольга Миколаївна, Швець Юрій Володимирович, Єршова Емма Олександрівна
Формула / Реферат
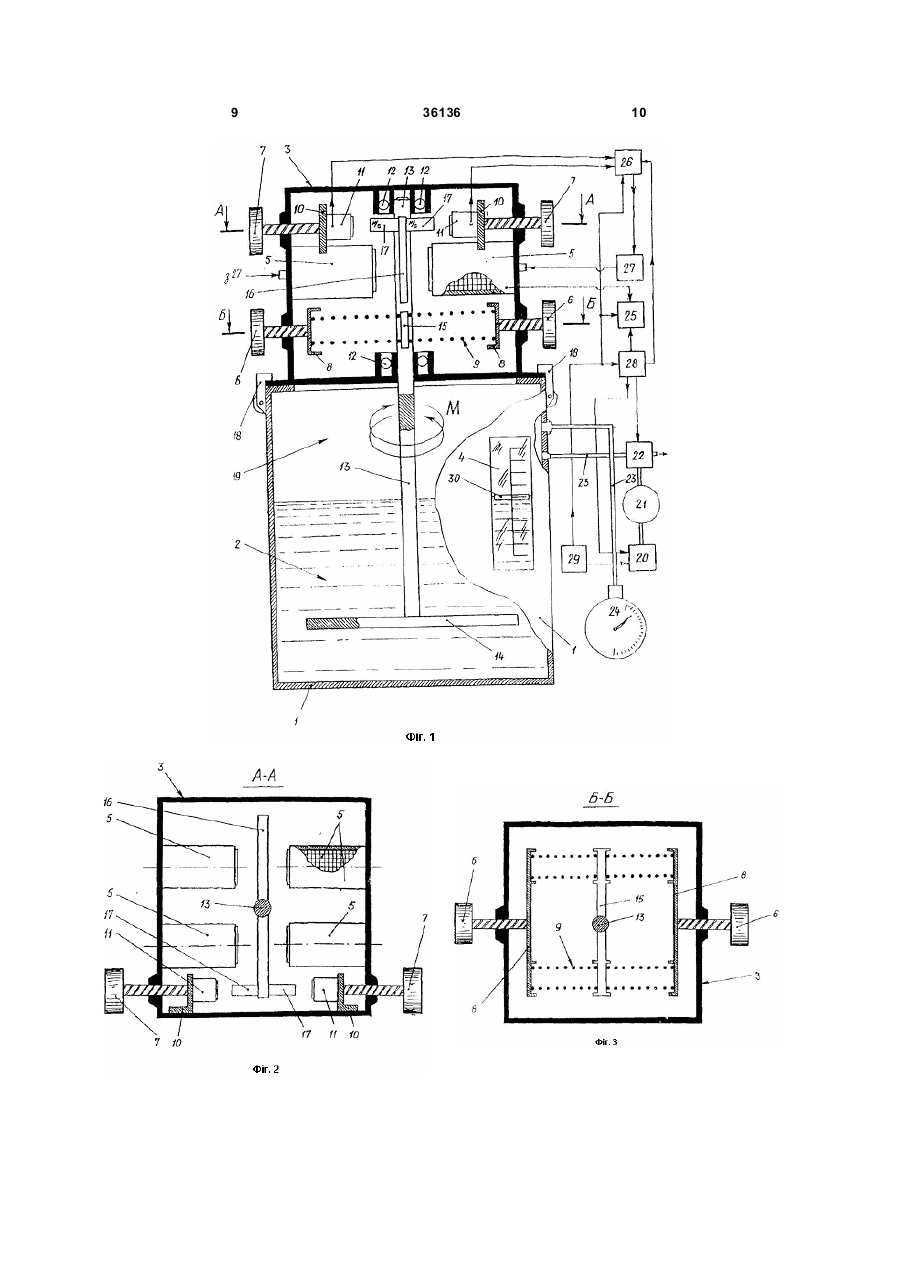
Прилад для вимірювань в'язкості, що містить корпус, датчик в'язкості і контур збудження коливань датчика в'язкості, який містить спарений електромагніт, який відрізняється тим, що його додатково оснащено блоком керування, підсилювачем збудження, частотно-коливальною ланкою, яка містить двоконсольний вал з жорстко закріпленим на торці однієї з його консолей диском, пружинами і вузлами настроювання жорсткості динамічної системи, ємністю, фазоінвертором, індукційними датчиками, постійними магнітами, частотоміром, джерелом живлення і системою підвищення тиску, в контур збудження коливань уведена додатково пара електромагнітів, корпус виконано сполученим з ємністю з утворенням герметичної порожнини, ємність виконана зв'язаною із системою підвищення тиску, частотно-коливальна ланка зв'язана з контуром збудження коливань через силопередавальні феромагнітні пластини, жорстко і симетрично закріплені на другій консолі вала у площині його осі, постійні магніти виконані жорстко закріпленими на силопередавальних феромагнітних пластинах, виходи індукційних датчиків виконані сполученими з електромагнітами послідовно через підсилювач збудження коливань і фазоінвертор, вихід електромагніта виконаний сполученим з частотоміром, а виходи блока керування виконані сполученими з входами частотоміра, підсилювача збудження коливань, джерела живлення і системи підвищення тиску, а система підвищення тиску виконана такою, що містить компресор, вихід якого виконаний сполученим з герметичною порожниною приладу через редуктор та зворотний клапан за допомогою гнучких шлангів, і манометр, вхід якого виконаний сполученим із зазначеною герметичною порожниною приладу.
Текст
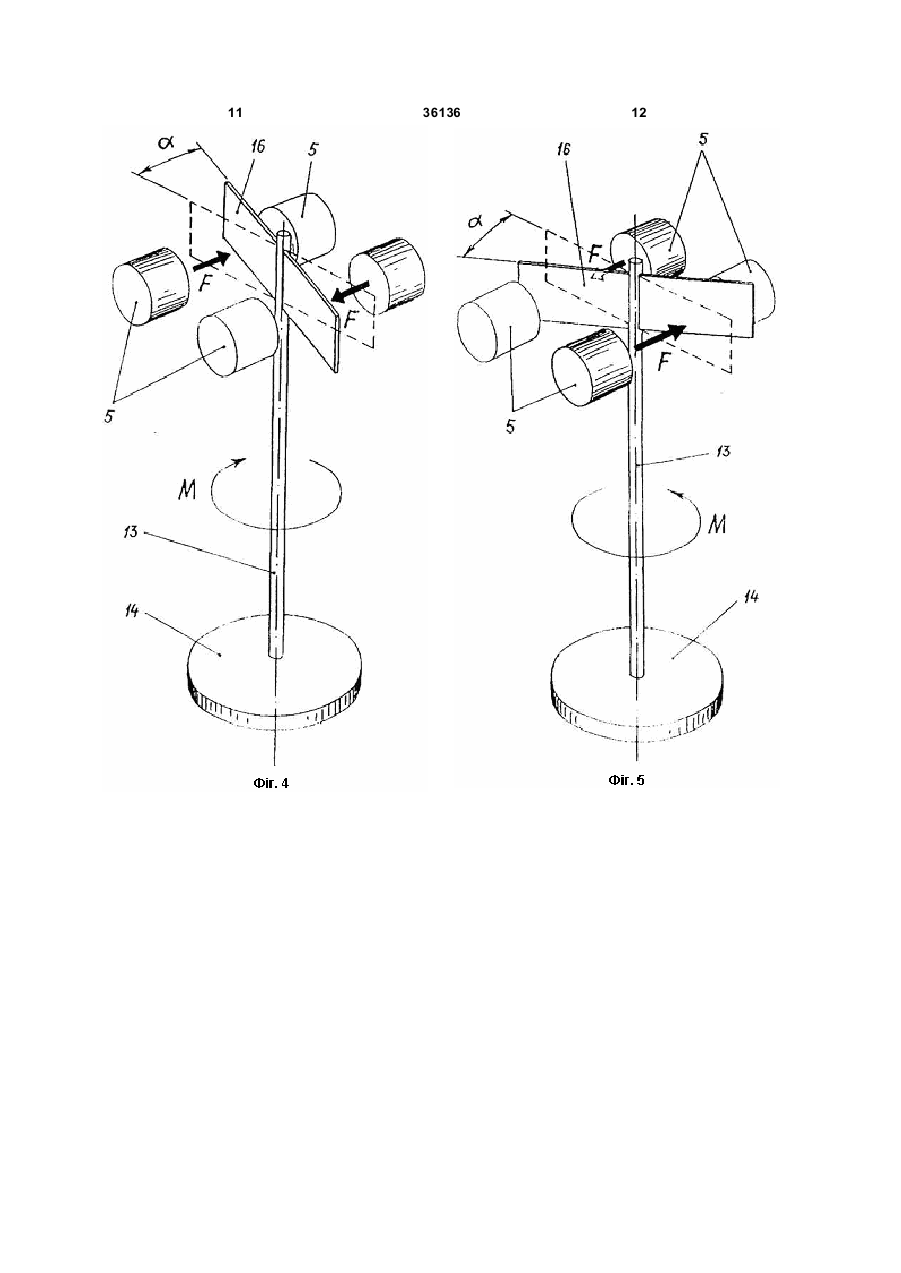
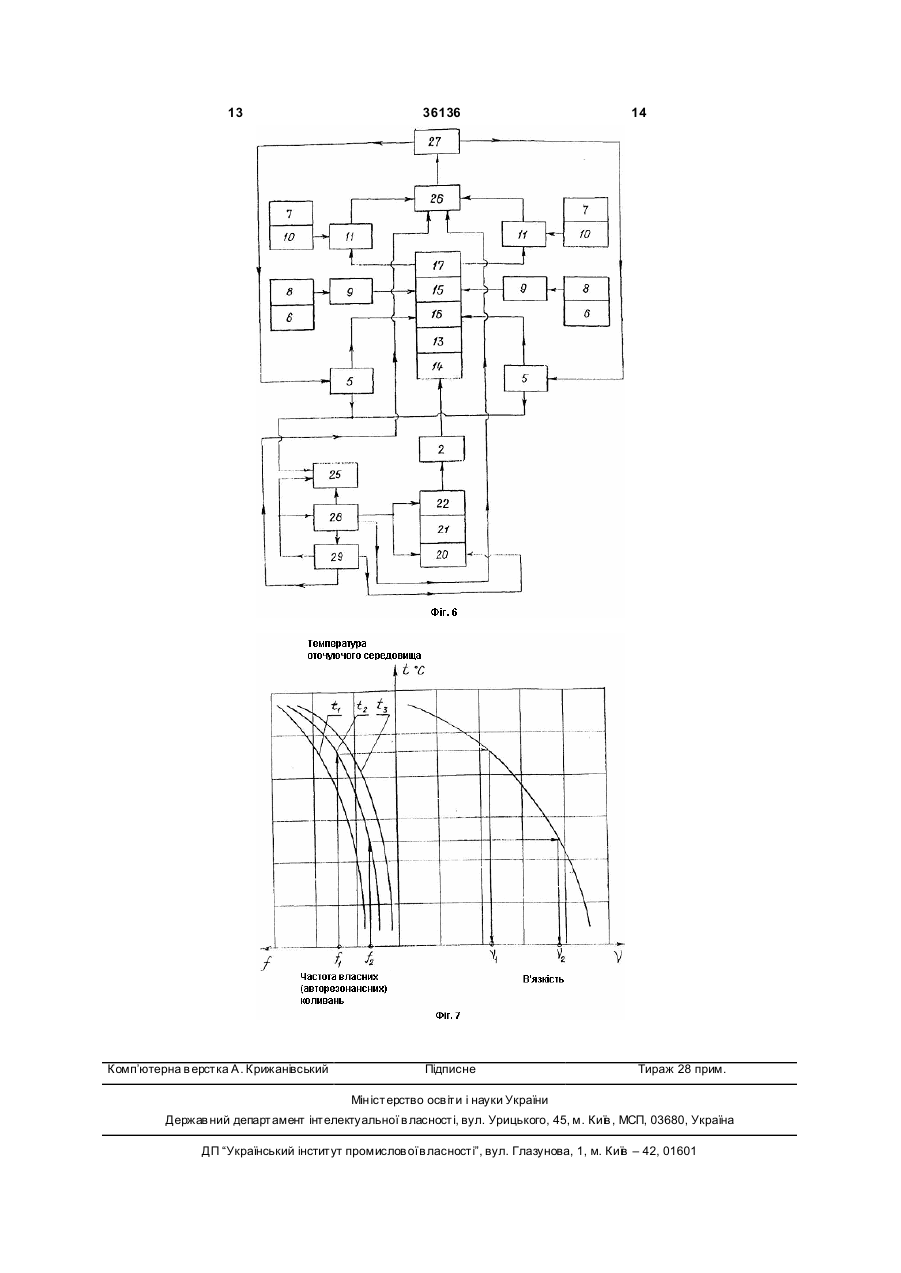
Прилад для вимірювань в'язкості, що містить корпус, датчик в'язкості і контур збудження коливань датчика в'язкості, який містить спарений електромагніт, який відрізняється тим, що його додатково оснащено блоком керування, підсилювачем збудження, частотно-коливальною ланкою, яка містить двоконсольний вал з жорстко закріпленим на торці однієї з його консолей диском, пружинами і вузлами настроювання жорсткості динамічної системи, ємністю, фазоінвертором, індукційними датчиками, постійними магнітами, частотоміром, U 2 (19) 1 3 36136 4 збудження коливань датчика в'язкості, який місзв'язана з контуром збудження коливань через тить спарений електромагніт [3]. силопередавальні феромагнітні пластини, жорстко Недоліком приладу для вимірювань в'язкості, і симетрично закріплені на другій консолі вала у обраним за прототип, є недостатня точність виміплощині його осі, постійні магніти виконані жорстко рювання і, як наслідок, похибки у визначенні велизакріпленими на силопередавальних феромагнітчини в'язкості досліджуваного середовища (матених пластинах, виходи індукційних датчиків викоріалу). нані сполученими з електромагнітами послідовно В основу корисної моделі поставлена задача через підсилювач збудження коливань і фазоінвешляхом усунення недоліків прототипу забезпечити ртор, вихід електромагніту виконаний сполученим підвищення точності вимірювання величини в'язз частотоміром, а виходи блоку керування виконакості досліджуваного середовища. ні сполученими з входами частотоміра, підсилюРішення технічної задачі у приладі для вимівача збудження коливань, джерела живлення і рювань в'язкості, що містить корпус, датчик в'язкосистеми підвищення тиску, а система підвищення сті і контур збудження коливань датчика в'язкості, тиску виконана такою, що містить компресор, вихід який містить спарений електромагніт, досягається якого виконаний сполученим з герметичною поротим, що він додатково оснащений блоком керужниною приладу через редуктор та зворотний вання, підсилювачем збудження, частотноклапан за допомогою гнучких шлангів, і манометр, коливальною ланкою, яка містить двоконсольний вхід якого виконаний сполученим із зазначеною вал з жорстко закріпленим на торці однієї з його герметичною порожниною приладу. консолей диском, пружинами і вузлами настроюТаким чином, прилад для вимірювань в'язкосвання жорсткості динамічної системи, ємністю, ті, що заявляється, відповідає критерію "новизна". фазоінвертором, індукційними датчиками, постійСуть корисної моделі пояснюється кресленняними магнітами, частотоміром, джерелом живленми, де на Фіг.1 надана конструктивноня і системою підвищення тиску. Суть корисної компонувальна схема приладу для вимірювань моделі досягається також і тим, що в контур збув'язкості на виді збоку, з розтинами для пояснення дження коливань уведена додаткова пара електконструкції, на Фіг.2 надана конструктивноромагнітів, корпус виконано сполученим з ємністю компонувальна схема приладу для вимірювань з утворенням герметичної порожнини, ємність вив'язкості на виді зверху, у розтині А-А, на Фіг.3 наконана зв'язаною з системою підвищення тиску, дана конструктивно-компонувальна схема приладу частотно-коливальна ланка зв'язана з контуром для вимірювань в'язкості на виді зверху, у розтині збудження коливань через силопередавальні феБ-Б, на Фіг.4-5 надана схема збудження крутильромагнітні пластини, жорстко і симетрично закріпних коливань вала з диском, відповідно у перший лені на другій консолі вала у площині його осі, пота другий напівперіоди коливань, на Фіг.6 надана стійні магніти виконані жорстко закріпленими на блок-схема приладу для вимірювань в'язкості, яка сило-передавальних феромагнітних пластинах, пояснює його роботу, на Фіг.7 надана номограма виходи індукційних датчиків виконані сполученими залежності частоти авторезонансних коливань f з електромагнітами послідовно через підсилювач системи від в'язкості n досліджуваного матеріалу збудження і фазоінвертор, вихід електромагніту та температури t навколишнього середовища. виконано сполученим з частотоміром, а виходи Прилад для вимірювань в'язкості містить ємблоку керування виконані сполученими з входами ність 1 для досліджуваного середовища 2, яка частотоміра, підсилювача збудження коливань, з'єднана певним чином з корпусом 3. На корпусі 3 джерела живлення і системи підвищення тиску, а виконане вікно 4, на прозорій частині якого нанесистема підвищення тиску виконана такою, що сена координатна сітка. Усерединікорпусу 3 жорсмістить компресор, вихід якого виконаний сполутко закріплені електромагніти 5, які встановлені ченим з герметичною порожниною приладу через симетрично і попарно співвісно. Зовні корпусу 3 редуктор та зворотний клапан за допомогою гнучрозташовані регулювальні гвинти 6 і 7. Гвинт 6 ких шлангів, і манометр, вхід якого виконаний споконструктивно виконаний зв'язаним з пристосулученим із зазначеною герметичною порожниною ванням 8 для затягування пружини 9, а гвинт 7 - з приладу. пристосуванням 10 для переміщення індукційних Порівняльний аналіз технічного рішення з продатчиків 11, жорстко закріплених на пристосуванні тотипом показує, що прилад для вимірювань в'яз10. Усередині корпусу 3 в підшипниках кочення 12 кості, що заявляється, відрізняється тим, що його закріплений вал 13 з диском 14 на вільному кінці, додатково оснащено блоком керування, підсилюпри цьому диск 14 встановлений своєю площиною вачем збудження, частотно-коливальною ланкою, перпендикулярно осі вала 13. На валу 13 жорстко яка містить двоконсольний вал з жорстко закріпзакріплені силопередавальні феромагнітні пластиленим на торці однієї з його консолей диском, ни 15 і 16. Пластини 15 і 16 розташовані кожна в пружинами і вузлами настроювання жорсткості площині, що проходить крізь вісь вала 13. Як варідинамічної системи, ємністю, фазоінвертором, ант конструктивного виконання пластини 15 і 16 індукційними датчиками, постійними магнітами, можуть бути розміщені як в одній площині, так і під частотоміром, джерелом живлення і системою кутом одна до одної відносно осі вала 13. На пласпідвищення тиску, в контур збудження коливань тини 15 опираються пружини 9, а на пластинах 16 уведена додатково пара електромагнітів. Прилад закріплені постійні магніти 17, при цьому пружини відрізняється також і тим, що корпус виконано 9 опираються одним кінцем на пластини 15, а інсполученим з ємністю з утворенням герметичної шим - на пристосування 8. Пластини 16 розміщені порожнини, ємність виконана зв'язаною із системіж електромагнітами 5. Корпус 3 приладу кріпитьмою підвищення тиску, частотно-коливальна ланка ся до ємності 1 за допомогою замків 18. Внутрішні 5 36136 6 стінки ємності 1 і корпус 3 утворюють герметичну При вмиканні приладу в роботу за допомогою порожнину 19. Система підвищення тиску виконаблоку керування 28 в індукційному датчику 11, на такою, що містить компресор 20, вихід якого який знаходиться в магнітному полі постійного виконаний сполученим з герметичною порожнимагніту 17, відпрацьовується сигнал у вигляді еленою 19 приладу через редуктор 21 та зворотний ктрорушійної сили (ЕРС) індукції. При цьому індукклапан 22 за допомогою гнучких шлангів 23. Звоційні датчики 11 і постійні магніти 17 встановлені ротний клапан 22 виконаний з'єднаним з атмосфетак, що ЕРС відпрацьовується тільки в одному з рою. Герметична порожнина 19 виконана сполучедатчиків 11. Сигнал з цього датчика 11 через фаною з манометром 24 системи підвищення тиску. зоінвертор 27 подається спочатку на підсилювач Вихід електромагнітів 5 виконаний сполученим з збудження коливань 26, де здійснюється його піделектронно-обчислювальним частотоміром 25. силювання і далі, за допомогою фазоінвертора 27, Виходи індукційних датчиків 11 виконані сполучена діагонально-протилежні магніти 5 (див. Фіг.1, ними з електромагнітами 5 послідовно через підФіг.2 та Фіг.4-5). Електромагніти 5 (до яких підвесилювач збудження коливань 26 і фазоінвертор дений підсилений сигнал) починають діяти на си27, а виходи блока керування 28 виконані сполулопередавальну феромагнітну пластину 15 парою ченими з входами частотоміра 25, підсилювача сил F відносно осі обертання вала 13. При цьому збудження коливань 26, джерела живлення 29, вал 13 буде повертатися у підшипниках кочення компресора 20 і зворотного клапана 22 системи 12 у напрямку моменту М, створеного парою сил F підвищення тиску (див. Фіг.1 та Фіг.6). Виходи джевід електромагнітів 5 (див. Фіг.4). Діагонально прорела живлення 29 виконані сполученими з входатилежні (відносно працюючих електромагнітів 5) ми підсилювача збудження коливань 26, електропружини 9 почнуть стискуватися, накопичуючи нно-обчислювального частотоміра 25, блоку енергію. При досягненні положення рівноваги, при керування 28 та компресора 20 (див. Фіг.1 та якому сила від електромагнітів 5 буде дорівнювати Фіг.6). На координатній сітці, що нанесена на просилі затягування пружини 9, сигнал на працюючозорому матеріалі вікна 4, виконана контрольна му індукційному датчику 11 буде дорівнювати "нумітка 30 для визначення рівня заповнення ємності лю", а тому і "нулю" на електромагнітах 5. Не 1 досліджуваним матеріалом 2 (середовищем). отримуючи протидії з боку електромагнітів 5 (задіПрилад для вимірювань в'язкості працює наяних у перший напівперіод коливань - див. Фіг.4), ступним чином. пружини 9 почнуть розтискуватися, намагаючись Спочатку ємність 1 заповнюється досліджуваповернутися до положення рівноваги. Вал 13 з ним середовищем 2, при цьому рівень досліджудиском 14 почне повертатися у зворотний бік. У ваного середовища (матеріалу) 2 повинен знаходругий період коливань у роботу вступає інший дитись у відповідності до контрольної мітки 30. індукційний датчик 11 (на Фіг.1-2 симетрично розДля заповнення ємності 1 досліджуваним матеріаташований відносно осі вала 13 другий індукційний лом 2 відкриваються замки 18 і корпус 3 разом з датчик 11 конструктивно не показаний), сигнал з конструктивними елементами піднімається. Відякого, після підсилення у підсилювачі збудження крита ємність 1 заповнюється на таку величину, коливань 18, буде надходити за допомогою фазоіщоб диск 14 був занурений у досліджуване серенвертора 27 на два інших діагонально протилеждовище 2 не менше ніж на 1/2 довжини вала 13 них електромагніти 5, які впливають парою сил F (що відповідає рівню, визначеному контрольною (іншого знаку) на силопередавальну феромагнітну міткою 30). Величина заповнення ємності 1 контпластину 15, при цьому вони будуть надавати їй ролюється за допомогою контрольної мітки 30 на безконтактно додатковий рух у зворотний бік відкоординатній сітці, що нанесена на прозорий маносно першого напівперіоду коливань (див. Фіг.5). теріал, який закриває вікно 4. Таким чином, виникають механічні коливання Потім корпус 3 за допомогою замків 18 закріпсистеми "вал - диск -пружини", що не затухають, і люється на ємності 1. При цьому утворюється гесинфазні з ними електричні коливання в системі рметична порожнина 19. "датчик - підсилювач збудження коливань - електПісля підключення джерела живлення 29 до ромагніти", частота яких точно дорівнює частоті підсилювача збудження коливань 26 і частотоміра власних коливань системи "вал з диском - дослі25, а блока керування 28 - до входів частотоміра джуване середовище". 25, підсилювача збудження коливань 26, джерела Вимірювання частоти власних коливань здійсживлення 29, компресора 20 і зворотного клапана нюється за допомогою електронно22 системи підвищення тиску, прилад для вимірюобчислювального частотоміра 25, сигнал на який вань в'язкості готовий до роботи. надходить з електромагніту 5 (див. Фіг.1 та Фі г.6). За допомогою блоку керування 28 вмикається Залежно від в'язкості та щільності досліджувакомпресор 20 і стиснуте повітря через регулятор ного середовища 2, тертя між диском 14, який затиску 21 і зворотний клапан 22 подається гнучкими нурений у досліджуване середовище 2, і середошлангам 23 в герметичну порожнину 19 приладу. вищем 2 буде різним. Наскільки середовище 2 Тиск повітря в герметичній порожнині 19 контробуде близьким до рідкого стану, настільки сила люється за допомогою манометра 24. При досягтертя буде меншою, а частота власних крутильних нення тиску повітря в порожнині 19 визначеної коливань f більшою. І навпаки, у досліджуваному величини (яка задається технічними характериссередовищі більшої щільності сили зчеплення сетиками приладу), компресор 20 вимикається, а редовища 2 і диска 14 можуть бути настільки зназворотний клапан 22 утримує тиск повітря визначними, що при певній (початковій) жорсткості диченої величини в порожнині 19 приладу. намічної системи зусиль від електромагнітів 5 не вистачить, щоб їх подолати. У цьому випадку, за 7 36136 8 допомогою регулювального гвинта 7 індукційний здійснюють деяке збільшення частоти обертання датчик 11, жорстко закріплений на пристосуванні вала 13 і, як наслідок, зменшення амплітуди коли10, перемішується у бік постійного магніту 17. вань (кута повороту a - див. Фіг.4 та Фіг.5) зазнаЗменшення зазору між датчиком 11 і постійним ченого вала 13. Зменшення кута повороту a вала магнітом 17 призводить до того, що збільшується 13 з диском 14 буде сприяти зменшенню сили тервеличина сигналу, що виробляється датчиком 11 у тя між середовищем 2 і диском та підвищить чутвигляді ЕРС індукції і, як наслідок, збільшується ливість частотно-вибіркової ланки. потужність сигналу, який надходить від підсилюваВиконання вимірювання частоти власних (авча збудження коливань 26 на електромагніти 5. торезонансних) коливань у другому випадку здійсВодночас, шляхом стискання за допомогою гвинтів нюється аналогічно вищезазначеному. Наприклад, 6 пружин 9, здійснюють деяке збільшення частоти приконтрольному вимірюванні в'язкості n досліобертання вала 13 і, як наслідок, зменшення ампджуваного матеріалу була отримана частота автолітуди коливань (кута повороту a - див. Фіг.4 та резонансних коливань f2. Згідно з номограмою, на Фіг.5) зазначеного вала 13. Зменшення кута повоосі f знаходять величину f 2, проводять перпендироту a вала 13 з диском 14 буде сприяти зменкуляр до графіка t (на Фіг.7 - зазначено t1, t 2 та t3), шенню сили тертя між середовищем 2 і диском та відповідно до температури t2 (як приклад) перехопідвищить чутливість частотно-вибіркової ланки. дять паралельно базовій осі до графіка зміни в'язПри виконанні контрольного заміру параметрів кості n і, опускаючи перпендикуляр з точки перетив'язкості досліджуваного матеріалу 2, якою може ну зазначеного графіка на вісь n, отримують бути, наприклад, фарба, нафта, бензин, гас, спирт величину фактичної в'язкості n 2 досліджуваного та інші речовини, вимірюють частоту f авторезонаматеріалу (див. номограму на Фіг.7). нсних (власних) коливань частотно-вибіркової Після проведення досліджень за допомогою ланки. Тертя між диском 14 та досліджуваним маблоку керування 28 подають команду на звороттеріалом 2 призведе до виникнення дисипативних ний клапан 22, який зменшує тиск повітря у поросил тертя і, як наслідок, до зменшення частоти f жнині 19. При цьому паралельно подають команду авторезонансних коливань системи "вал з диском на частотомір 25, підсилювач збудження коливань досліджуване середовище". Знаючи виміряні ра26, джерело живлення 29 та компресор 20, які виніше еталонні частоти коливань f частотномикають з роботи. вибіркової ланки в ємності з досліджуваним матеПісля того, коли тиск повітря у порожнині 19 ріалом 2, параметри якого перевірені іншими мебуде зменшено, відкривають замки 18, знімають з тодами контролю [4], і порівнюючи їх з показникаємності 1 корпус 3, а досліджуване середовище 2 ми частотоміра 25 при контрольному вимірюванні, зливають із зазначеної ємності 1. отримують за номограмою залежності частоти На цьому процес досліджень закінчується. авторезонансних коливань f системи "вал з диском Використання як показника в'язкості досліджу- ємність - досліджуваний матеріал" від в'язкості n ваної речовини частоти власних (авторезонансдосліджуваного матеріалу та температури t навконих) коливань дозволить підвищити точність вилишнього середовища величину в'язкості n дослізначення в'язкості досліджуваного середовища, джуваного матеріалу (див. номограму на Фіг.7). розширити функціональні можливості приладу Наприклад, при контрольному вимірюванні в'язкошляхом вимірювання в'язкості не тільки рідких сті n досліджуваного матеріалу була отримана середовищ, але й середовищ, які мають більшу частота авторезонансних коливань f1. Згідно з нов'язкість та щільність. Використання приладу, що мограмою, на осі f знаходять величину f1 провозаявляється, можливе не тільки у виробничих дять перпендикуляр до графіка t (на Фіг.7 - зазнаумовах, але й у польових, а також зазначений чено t1, t 2 та t3), відповідно до температури t2 (як прилад може бути розташовано в конструкції баків приклад), переходять паралельно базовій осі до для зберігання різноманітних речовин, наприклад, в баках для пального літальних апаратів, в ємносграфіка зміни в'язкості n і, опускаючи перпендикуляр з точки перетину зазначеного графіка на вісь тях для зберігання пального на автозаправних станціях, в ємностях для перевезення молока, n, отримують величину фактичної в'язкості n 1 додрукарських фарб та інше. Контроль за вимірюсліджуваного матеріалу (див. номограму на Фіг.7). ванням фізико-хімічних властивостей вищезазнаЯкщо контролюють досліджуване середовище чених речовин у цьому випадку може вестись дисбільшої щільності, сили зчеплення середовища 2 і танційно, в автоматичному режимі. диска 14 можуть бути настільки значними, що при Джерела інформації: певній (початковій) жорсткості динамічної системи 1. А. с. СРСР №717625,1980р., MПКG01N11/16 зусиль від електромагнітів 5 не вистачить, щоб їх - аналог. подолати. У цьому випадку, за допомогою регулю2. A. с. СРСР №238875,1966р., вального гвинта 7, індукційний датчик 11, жорстко MПKG01N11/16 -аналог. закріплений на пристосуванні 10, переміщується у 3. А. с. СРСР №789704,1980р., MПКG01N11/16 бік постійного магніту 17 (N/S). Зменшення зазору - прототип. між датчиком 11 і постійним магнітом 17 призво4. Н. Й. Орел, Э. В. Губачек, Б. Й. Березин, В. дить до того, що збільшується величина сигналу, М. Водолазская «Справочник технологащо виробляється датчиком 11, у вигляді ЕРС індуполиграфиста», часть 5, Печатные краски, М., кції і, як наслідок, збільшується потужність сигна«Книга», 1988г., стр. 188-202, §4.3 «Реологические лу, який надходить від підсилювача збудження свойства красок для издательских целей». коливань 26 на електромагніти 5. Водночас, шляхом стискання за допомогою гвинтів 6 пружин 9, 9 36136 10 11 36136 12 13 Комп’ютерна в ерстка А. Крижанівський 36136 Підписне 14 Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for measurement of viscosity
Автори англійськоюVorobiov Vitalii Ivanovych, Yershova Emma Oleksandrivna, Zaikivskyi Oleksandr Boleslavovych, Petrashova Olha Mykolaivna, Shvets Yurii Volodymyrovych
Назва патенту російськоюПрибор для измерения вязкости
Автори російськоюВоробьев Виталий Иванович, Ершова Эмма Александровна, Зайкивский Александр Болеславович, Петрашова Ольга Николаевна, Швец Юрий Владимирович
МПК / Мітки
МПК: G01N 11/06
Мітки: прилад, в'язкості, вимірювань
Код посилання
<a href="https://ua.patents.su/7-36136-prilad-dlya-vimiryuvan-vyazkosti.html" target="_blank" rel="follow" title="База патентів України">Прилад для вимірювань в`язкості</a>
Прилад для вимірювань в’язкості
Номер патенту: 45811
Опубліковано: 15.04.2002
Автори: Никифорук Богдан Васильович, Єршова Емма Олександрівна
МПК: G01N 11/16
Мітки: в'язкості, прилад, вимірювань
Формула / Реферат:
1. Прилад для вимірювань в'язкості, що містить корпус, датчик в'язкості і контур збудження коливань датчика в'язкості, який містить спарений електромагніт, який відрізняється тим, що він додатково оснащений блоком керування, підсилювачем збудження, частотно-коливальною ланкою, яка містить двоконсольний вал з жорстко закріпленим на торці однієї з його консолей диском, пружину і вузли настроювання жорсткості...
Прилад для вимірювання в’язкості рідких речовин
Номер патенту: 46574
Опубліковано: 15.05.2002
Автори: Єршова Емма Олександрівна, Никифорук Богдан Васильович
МПК: G01N 11/16
Мітки: в'язкості, рідких, речовин, вимірювання, прилад
Формула / Реферат:
1. Прилад для вимірювання в'язкості рідких речовин, що містить корпус, датчик в'язкості і контур збудження коливань датчика в'язкості, який містить спарений електромагніт, який відрізняється тим, що він додатково оснащений блоком керування, підсилювачем збудження, частотно-коливальною ланкою, яка містить двоконсольний вал з жорстко закріпленим на торці одній з його консолей конусом, пружини і вузли настроювання жорсткості динамічної системи,...
Спосіб визначення в’язкості речовин
Номер патенту: 40910
Опубліковано: 15.08.2001
Автори: Никифорук Богдан Васильович, Єршова Емма Олександрівна
МПК: G01N 11/16
Мітки: визначення, спосіб, в'язкості, речовин
Формула / Реферат:
Спосіб визначення в'язкості речовин, при якому проводять занурення чутливого елемента, виконаного у вигляді зонда, у досліджуване середовище, подають електричний струм до системи збудження коливань чутливого елемента, збуджують коливання зонда, і за зміною параметрів коливальної системи, яка зв'язана з величиною в'язкості речовини, визначають її значення, який відрізняється тим, що збуджують коливання зонда з власною частотою, а величину...
Спосіб визначення в’язкості речовин
Номер патенту: 36055
Опубліковано: 10.10.2008
Автори: Воробйов Віталій Іванович, Єршова Емма Олександрівна, Зайківський Олександр Болеславович, Швець Юрій Володимирович
МПК: G01N 11/16
Мітки: в'язкості, визначення, речовин, спосіб
Формула / Реферат:
Спосіб визначення в'язкості рідких речовин, що полягає у зануренні чутливого елемента, виконаного у вигляді зонда, у досліджуване середовище, подачі електричного струму до системи збудження коливань чутливого елемента, збудженні коливань зонда і визначенні значення в'язкості речовини за зміною параметрів коливальної системи, що зв'язана з величиною в'язкості речовини, який відрізняється тим, що збуджують коливання зонда з власною частотою, а...
Спосіб визначення в’язкості
Номер патенту: 44152
Опубліковано: 15.01.2002
Автори: Никифорук Богдан Васильович, Єршова Емма Олександрівна
МПК: G01N 11/16
Мітки: визначення, спосіб, в'язкості
Формула / Реферат:
Спосіб визначення в'язкості дисперсного середовища, що містить занурення чутливого елемента, виконаного у вигляді зонда, у досліджуване середовище, і збудження коливань зонда з наступним виміром амплітуди його коливань, якими відрізняється тим, що збуджують коливання зонда з власною/авторезонансною частотою, заміряють частоту і амплітуду власних/авторезонансних коливань зонда без занурення його у досліджуване середовище, заміряють при цьому...
Попередній патент: Аксіально-поршнева гідромашина
Наступний патент: Спосіб вимірювання в’язкості
Випадковий патент: Спосіб лікування цукрового діабету другого типу і ожиріння за корженевським