Прилад для вимірювань в’язкості
Номер патенту: 45811
Опубліковано: 15.04.2002
Автори: Никифорук Богдан Васильович, Єршова Емма Олександрівна
Формула / Реферат
1. Прилад для вимірювань в'язкості, що містить корпус, датчик в'язкості і контур збудження коливань датчика в'язкості, який містить спарений електромагніт, який відрізняється тим, що він додатково оснащений блоком керування, підсилювачем збудження, частотно-коливальною ланкою, яка містить двоконсольний вал з жорстко закріпленим на торці однієї з його консолей диском, пружину і вузли настроювання жорсткості динамічної системи, ємкістю, фазоінвертором, індукційними датчиками, постійними магнітами, частотоміром, джерелом живлення і системою підвищення тиску, в контур збудження коливань введена додаткова пара електромагнітів, при цьому корпус виконано сполученим з ємкістю з утворенням герметичної порожнини, ємкість виконана зв'язаною із системою підвищення тиску, частотно-коливальна ланка зв'язана з контуром збудження коливань через силопередавальні феромагнітні пластини, жорстко і симетрично закріплені на другій консолі вала у площині його осі, постійні магніти виконано жорстко закріпленими на силопередавальних феромагнітних пластинах, виходи індукційних датчиків виконано сполученими з електромагнітами послідовно через підсилювач збудження і фазоінвертор, вихід електромагніту виконано сполученим з частотоміром, а виходи блока керування виконано сполученими з входами частотоміра, підсилювача збудження, джерела живлення і системи підвищення тиску.
2. Прилад для вимірювань в'язкості за п. 1, який відрізняється тим, що система підвищення тиску виконана такою, що містить компресор, вихід якого виконано сполученим з герметичною порожниною приладу через редуктор та обернений клапан за допомогою гнучких шлангів, та манометр, вхід якого виконано сполученим із зазначеною герметичною порожниною приладу.
Текст
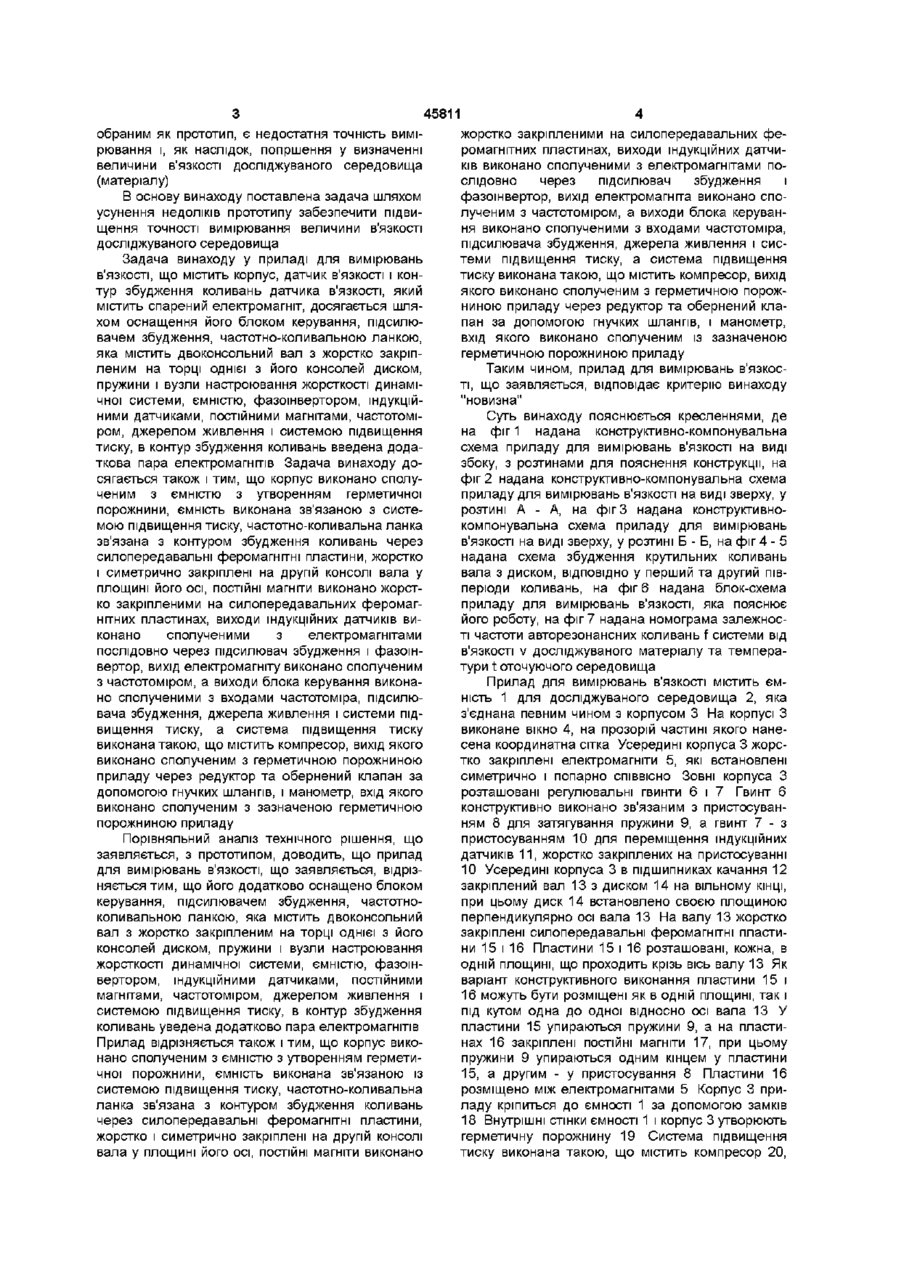
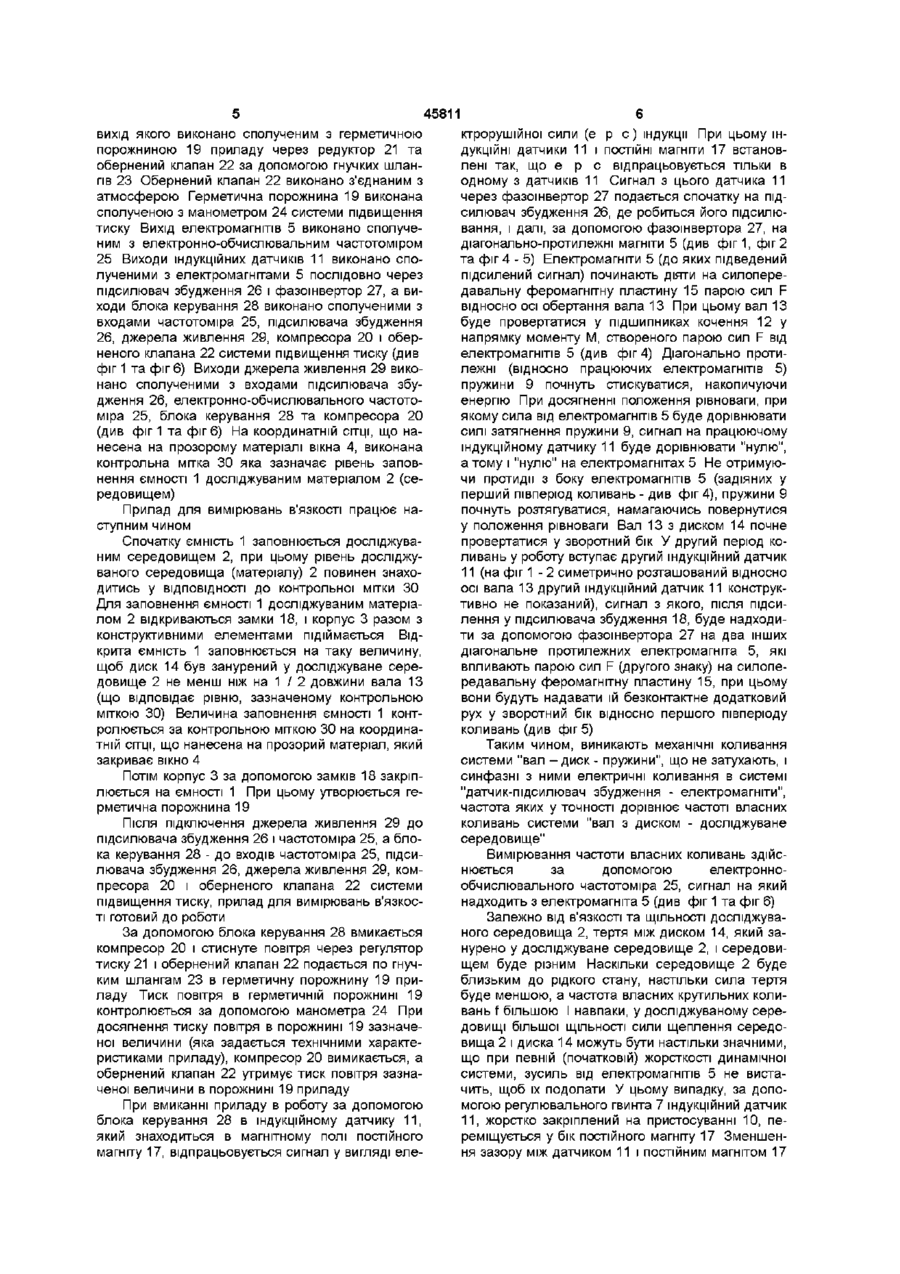
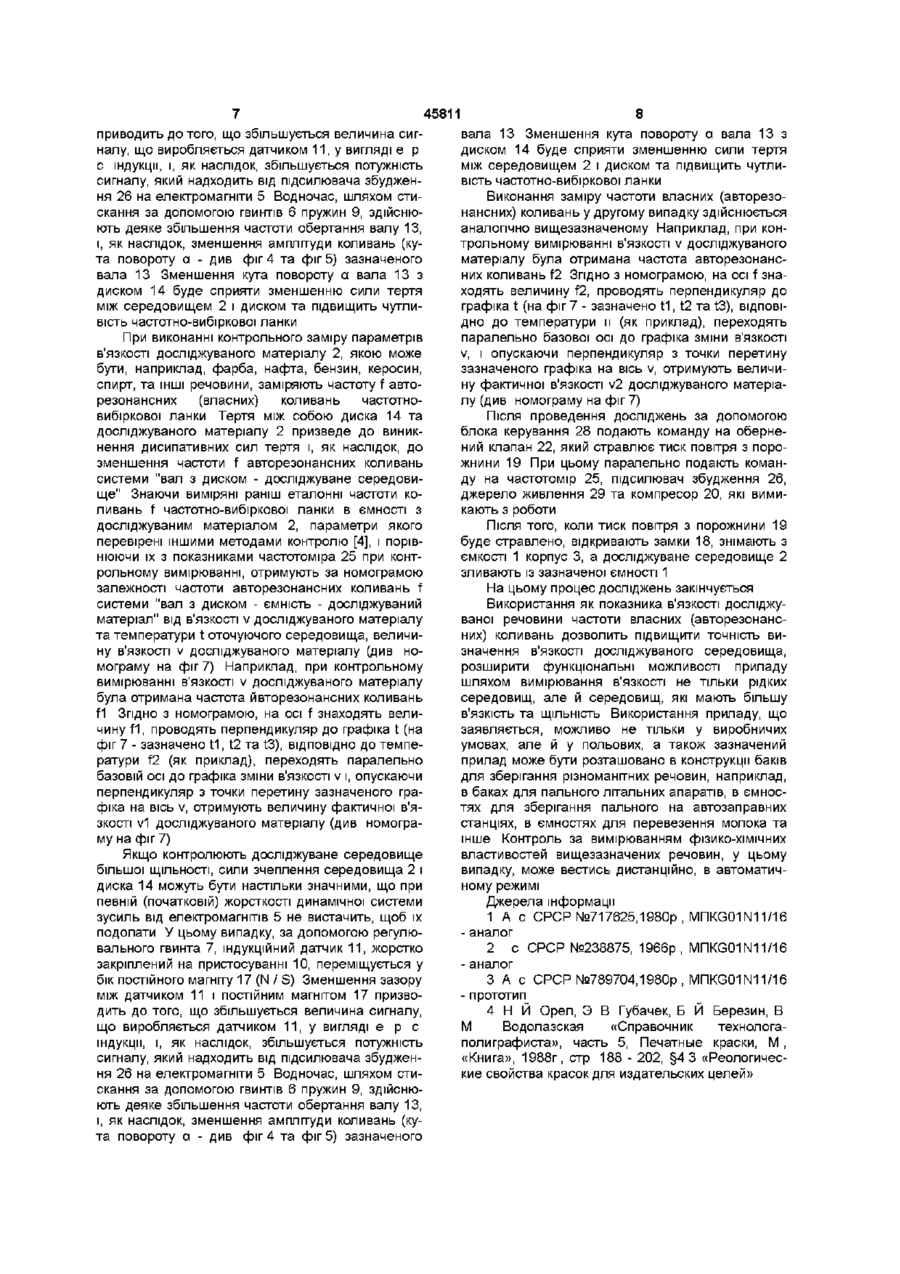
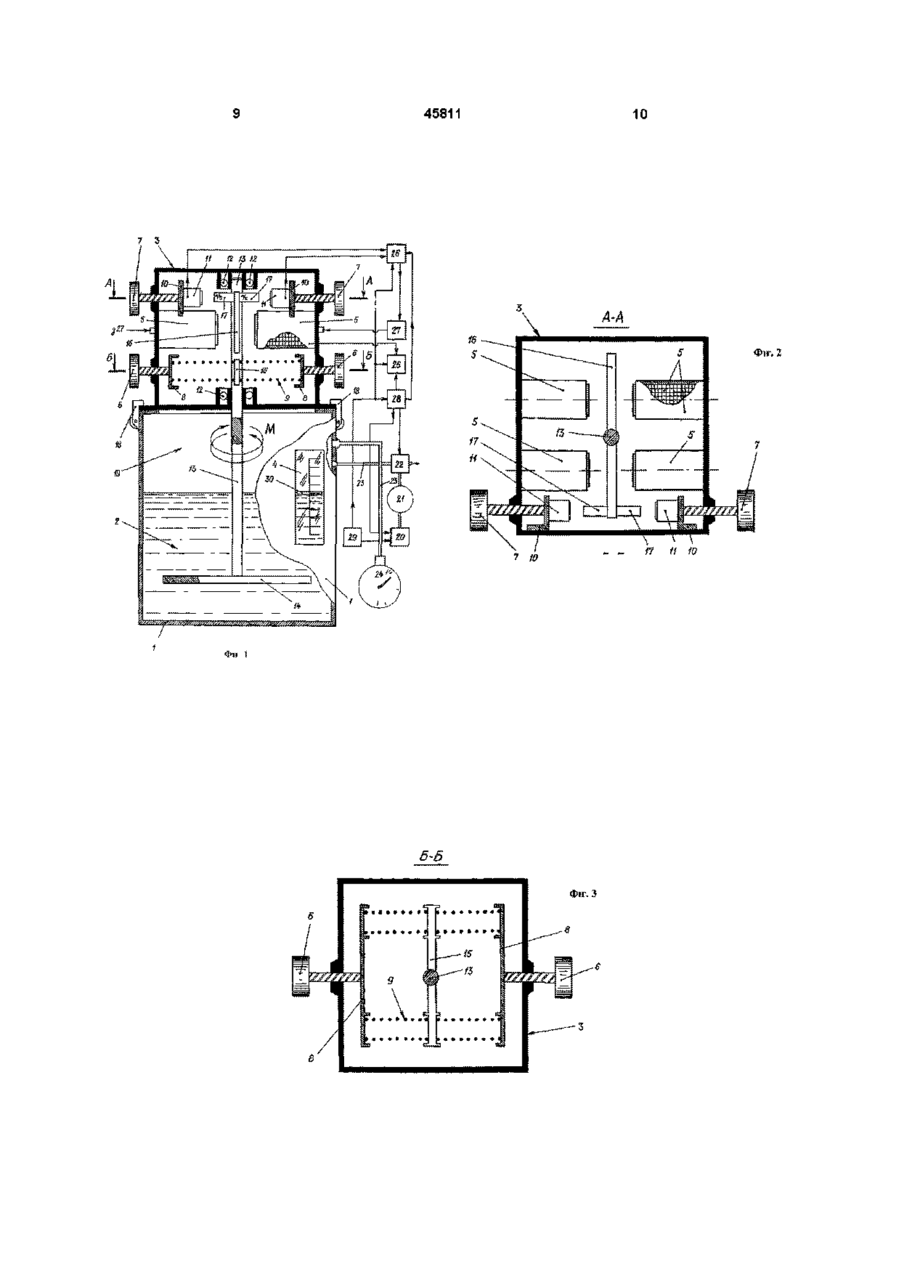
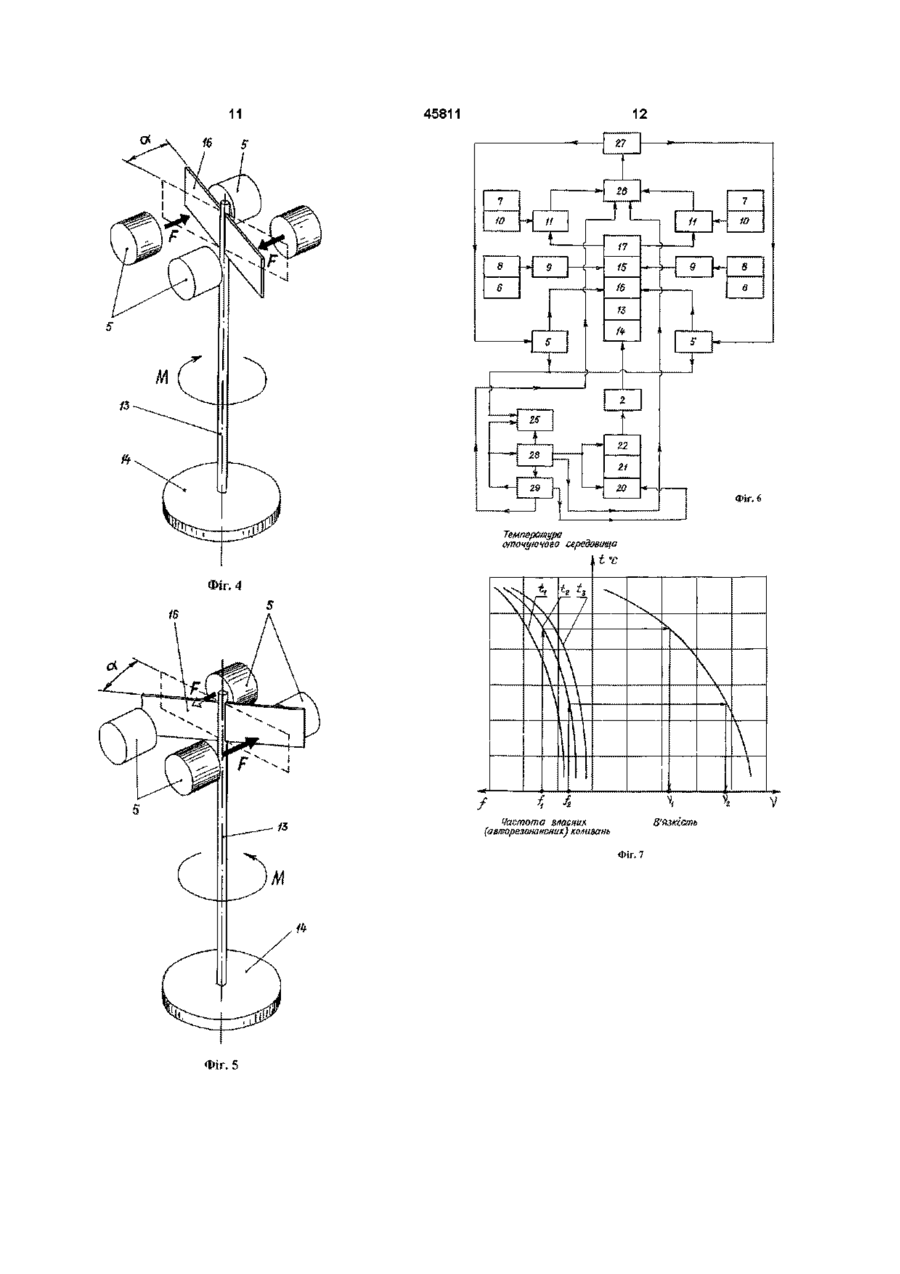
1 Прилад для вимірювань в'язкості, що містить корпус, датчик в'язкості і контур збудження коливань датчика в'язкості, який містить спарений електромагніт, який відрізняється тим, що він додатково оснащений блоком керування, підсилювачем збудження, частотно-коливальною ланкою, яка містить двоконсольний вал з жорстко закріпленим на торці однієї з його консолей диском, пружину і вузли настроювання жорсткості динамічної системи, ємкістю, фазоінвертором, індукційними датчиками, постійними магнітами, частотоміром, джерелом живлення і системою підвищення тиску, в контур збудження коливань введена додаткова пара електромагнітів, при цьому корпус виконано сполученим з ємкістю з утво ренням герметичної порожнини, ємкість виконана зв'язаною із системою підвищення тиску, частотноколивальна ланка зв'язана з контуром збудження коливань через силопередавальні феромагнітні пластини, жорстко і симетрично закріплені на другій консолі вала у площині його осі, ПОСТІЙНІ магніти виконано жорстко закріпленими на силопередавальних феромагнітних пластинах, виходи індукційних датчиків виконано сполученими з електромагнітами послідовно через підсилювач збудження і фазоінвертор, вихід електромагніту виконано сполученим з частотоміром, а виходи блока керування виконано сполученими з входами частотоміра, підсилювача збудження, джерела живлення і системи підвищення тиску 2 Прилад для вимірювань в'язкості за п 1, який відрізняється тим, що система підвищення тиску виконана такою, що містить компресор, вихід якого виконано сполученим з герметичною порожниною приладу через редуктор та обернений клапан за допомогою гнучких шлангів, та манометр, вхід якого виконано сполученим із зазначеною герметичною порожниною приладу Винахід відноситься до області дослідження середовища, а саме до приладів для вимірювання фізико-хімічних властивостей рідких і в'язких речовин, зокрема, до приладів для вимірювання в'язкості Відома конструкція вібраційного вимірювального перетворювача в'язкості, що містить корпус, зонд, зв'язаний з контуром збудження коливань, який містить електромеханічні перетворювачі III Недоліком відомої конструкції є те, що не забезпечується достатня точність вимірювання Відомий прилад для вимірювань в'язкості, який містить вібраційний датчик із зондом, який складається з верхнього і нижнього неоднорідних стержнів, поділених мембраною, який виконано на базі механотрона 6МХІБ, блок живлення механотрона, систему збудження маятникових коливань зонда, генератор звукових коливань, систему вимірювання вихідного сигналу датчика [2] Коливання зонда забезпечуються системою генерації, яка дозволяє плавно змінювати частоту коливань При цьому амплітуда маятникових коливань зонда є пропорційною частоті коливань і в'язкості матеріалу, що досліджується, яка реєструється пристроєм вимірювальної системи Недоліком відомого приладу для вимірювань в'язкості Є недостатня чутливість і мала ймовірність отриманих результатів контролю через недостатню точність вимірювань Це пояснюється тим, що система збудження маятникових коливань збуджує зонд з частотою змушених (які задаються) коливань Крім того, відомий прилад для вимірювань в'язкості може бути використаний тільки для визначення в'язкості рідких матеріалів Найбільш близьким технічним рішенням, обраним як прототип, є прилад для вимірювань в'язкості, що містить корпус, датчик в'язкості і контур збудження коливань датчика в'язкості, який містить спарений електромагніт [3] Недоліком приладу для вимірювань в'язкості, 00 ю обраним як прототип, є недостатня точність вимірювання і, як наслідок, погіршення у визначенні величини в'язкості досліджуваного середовища (матеріалу) В основу винаходу поставлена задача шляхом усунення недоліків прототипу забезпечити підвищення точності вимірювання величини в'язкості досліджуваного середовища Задача винаходу у приладі для вимірювань в'язкості, ЩО МІСТИТЬ корпус, датчик в'язкості І контур збудження коливань датчика в'язкості, який містить спарений електромагніт, досягається шляхом оснащення його блоком керування, підсилювачем збудження, частотно-коливальною ланкою, яка містить двоконсольний вал з жорстко закріпленим на торці однієї з його консолей диском, пружини і вузли настроювання жорсткості динамічної системи, ємністю, фазоінвертором, індукційними датчиками, постійними магнітами, частотоміром, джерелом живлення і системою підвищення тиску, в контур збудження коливань введена додаткова пара електромагнітів Задача винаходу досягається також і тим, що корпус виконано сполученим з ємністю з утворенням герметичної порожнини, ємність виконана зв'язаною з системою підвищення тиску, частотно-коливальна ланка зв'язана з контуром збудження коливань через силопередавальні феромагнітні пластини, жорстко і симетрично закріплені на другій консолі вала у площині його осі, ПОСТІЙНІ магніти виконано жорстко закріпленими на силопередавальних феромагнітних пластинах, виходи індукційних датчиків виконано сполученими з електромагнітами послідовно через підсилювач збудження і фазоінвертор, вихід електромагніту виконано сполученим з частотоміром, а виходи блока керування виконано сполученими з входами частотоміра, підсилювача збудження, джерела живлення і системи підвищення тиску, а система підвищення тиску виконана такою, що містить компресор, вихід якого виконано сполученим з герметичною порожниною приладу через редуктор та обернений клапан за допомогою гнучких шлангів, і манометр, вхід якого виконано сполученим з зазначеною герметичною порожниною приладу Порівняльний аналіз технічного рішення, що заявляється, з прототипом, доводить, що прилад для вимірювань в'язкості, що заявляється, відрізняється тим, що його додатково оснащено блоком керування, підсилювачем збудження, частотноколивальною ланкою, яка містить двоконсольний вал з жорстко закріпленим на торці однієї з його консолей диском, пружини і вузли настроювання жорсткості динамічної системи, ємністю, фазоінвертором, індукційними датчиками, постійними магнітами, частотоміром, джерелом живлення і системою підвищення тиску, в контур збудження коливань уведена додатково пара електромагнітів Прилад відрізняється також і тим, що корпус виконано сполученим з ємністю з утворенням герметичної порожнини, ємність виконана зв'язаною із системою підвищення тиску, частотно-коливальна ланка зв'язана з контуром збудження коливань через силопередавальні феромагнітні пластини, жорстко і симетрично закріплені на другій консолі вала у площині його осі, ПОСТІЙНІ магніти виконано 45811 жорстко закріпленими на силопередавальних феромагнітних пластинах, виходи індукційних датчиків виконано сполученими з електромагнітами послідовно через підсилювач збудження і фазоінвертор, вихід електромагніта виконано сполученим з частотоміром, а виходи блока керування виконано сполученими з входами частотоміра, підсилювача збудження, джерела живлення і системи підвищення тиску, а система підвищення тиску виконана такою, що містить компресор, вихід якого виконано сполученим з герметичною порожниною приладу через редуктор та обернений клапан за допомогою гнучких шлангів, і манометр, вхід якого виконано сполученим із зазначеною герметичною порожниною приладу Таким чином, прилад для вимірювань в'язкості, що заявляється, відповідає критерію винаходу "новизна" Суть винаходу пояснюється кресленнями, де на фіг 1 надана конструктивно-компонувальна схема приладу для вимірювань в'язкості на виді збоку, з розтинами для пояснення конструкції, на фіг 2 надана конструктивно-компонувальна схема приладу для вимірювань в'язкості на виді зверху, у розтині А - А, на фіг 3 надана конструктивнокомпонувальна схема приладу для вимірювань в'язкості на виді зверху, у розтині Б - Б, на фіг 4 - 5 надана схема збудження крутильних коливань вала з диском, ВІДПОВІДНО у перший та другий півперюди коливань, на фіг 6 надана блок-схема приладу для вимірювань в'язкості, яка пояснює його роботу, на фіг 7 надана номограма залежності частоти авторезонансних коливань f системи від в'язкості v досліджуваного матеріалу та температури t оточуючого середовища Прилад для вимірювань в'язкості містить ємність 1 для досліджуваного середовища 2, яка з'єднана певним чином з корпусом 3 На корпусі З виконане вікно 4, на прозорій частині якого нанесена координатна сітка Усередині корпуса 3 жорстко закріплені електромагніти 5, які встановлені симетрично і попарно СПІВВІСНО Зовні корпуса З розташовані регулювальні гвинти 6 і 7 Гвинт 6 конструктивно виконано зв'язаним з пристосуванням 8 для затягування пружини 9, а гвинт 7 - з пристосуванням 10 для переміщення індукційних датчиків 11, жорстко закріплених на пристосуванні 10 Усередині корпуса 3 в підшипниках качання 12 закріплений вал 13 з диском 14 на вільному КІНЦІ, при цьому диск 14 встановлено своєю площиною перпендикулярно осі вала 13 На валу 13 жорстко закріплені силопередавальні феромагнітні пластини 15 і 16 Пластини 15 і 16 розташовані, кожна, в одній площині, що проходить крізь вісь валу 13 Як варіант конструктивного виконання пластини 15 і 16 можуть бути розміщені як в одній площині, так і під кутом одна до одної відносно осі вала 13 У пластини 15 упираються пружини 9, а на пластинах 16 закріплені ПОСТІЙНІ магніти 17, при цьому пружини 9 упираються одним кінцем у пластини 15, а другим - у пристосування 8 Пластини 16 розміщено між електромагнітами 5 Корпус 3 приладу кріпиться до ємності 1 за допомогою замків 18 Внутрішні стінки ємності 1 і корпус 3 утворюють герметичну порожнину 19 Система підвищення тиску виконана такою, що містить компресор 20, 45811 вихід якого виконано сполученим з герметичною порожниною 19 приладу через редуктор 21 та обернений клапан 22 за допомогою гнучких шлангів 23 Обернений клапан 22 виконано з'єднаним з атмосферою Герметична порожнина 19 виконана сполученою з манометром 24 системи підвищення тиску Вихід електромагнітів 5 виконано сполученим з електронно-обчислювальним частотоміром 25 Виходи індукційних датчиків 11 виконано сполученими з електромагнітами 5 послідовно через підсилювач збудження 26 і фазоінвертор 27, а виходи блока керування 28 виконано сполученими з входами частотоміра 25, підсилювача збудження 26, джерела живлення 29, компресора 20 і оберненого клапана 22 системи підвищення тиску (див фіг 1 та фіг 6) Виходи джерела живлення 29 виконано сполученими з входами підсилювача збудження 26, електронно-обчислювального частотоміра 25, блока керування 28 та компресора 20 (див фіг 1 та фіг 6) На координатній СІТЦІ, ЩО на несена на прозорому матеріалі вікна 4, виконана контрольна мітка ЗО яка зазначає рівень заповнення ємності 1 досліджуваним матеріалом 2 (середовищем) Прилад для вимірювань в'язкості працює наступним чином Спочатку ємність 1 заповнюється досліджуваним середовищем 2, при цьому рівень досліджуваного середовища (матеріалу) 2 повинен знаходитись у ВІДПОВІДНОСТІ до контрольної мітки ЗО Для заповнення ємності 1 досліджуваним матеріалом 2 відкриваються замки 18, і корпус 3 разом з конструктивними елементами підіймається Відкрита ємність 1 заповнюється на таку величину, щоб диск 14 був занурений у досліджуване середовище 2 не менш ніж на 1 / 2 довжини вала 13 (що відповідає рівню, зазначеному контрольною міткою ЗО) Величина заповнення ємності 1 контролюється за контрольною міткою ЗО на координатній СІТЦІ, що нанесена на прозорий матеріал, який закриває вікно 4 Потім корпус 3 за допомогою замків 18 закріплюється на ємності 1 При цьому утворюється герметична порожнина 19 Після підключення джерела живлення 29 до підсилювача збудження 26 і частотоміра 25, а блока керування 28 - до входів частотоміра 25, підсилювача збудження 26, джерела живлення 29, компресора 20 і оберненого клапана 22 системи підвищення тиску, прилад для вимірювань в'язкості готовий до роботи За допомогою блока керування 28 вмикається компресор 20 і стиснуте повітря через регулятор тиску 21 і обернений клапан 22 подається по гнучким шлангам 23 в герметичну порожнину 19 приладу Тиск повітря в герметичній порожнині 19 контролюється за допомогою манометра 24 При досягнення тиску повітря в порожнині 19 зазначеної величини (яка задається технічними характеристиками приладу), компресор 20 вимикається, а обернений клапан 22 утримує тиск повітря зазначеної величини в порожнині 19 приладу При вмиканні приладу в роботу за допомогою блока керування 28 в індукційному датчику 11, який знаходиться в магнітному полі постійного магніту 17, відпрацьовується сигнал у вигляді еле ктрорушійної сили (є р с ) індукції При цьому індукційні датчики 11 і ПОСТІЙНІ магніти 17 встановлені так, що є р с відпрацьовується тільки в одному з датчиків 11 Сигнал з цього датчика 11 через фазоінвертор 27 подається спочатку на підсилювач збудження 26, де робиться його підсилювання, і далі, за допомогою фазоінвертора 27, на діагонально-протилежні магніти 5 (див фіг1, фіг 2 та фіг 4 - 5) Електромагніти 5 (до яких підведений підсилений сигнал) починають діяти на силопередавальну феромагнітну пластину 15 парою сил F відносно осі обертання вала 13 При цьому вал 13 буде провертатися у підшипниках кочення 12 у напрямку моменту М, створеного парою сил F від електромагнітів 5 (див фіг 4) Діагонально протилежні (відносно працюючих електромагнітів 5) пружини 9 почнуть стискуватися, накопичуючи енергію При досягненні положення рівноваги, при якому сила від електромагнітів 5 буде дорівнювати силі затягнення пружини 9, сигнал на працюючому індукційному датчику 11 буде дорівнювати "нулю", а тому і "нулю" на електромагнітах 5 Не отримуючи протидії з боку електромагнітів 5 (задіяних у перший півперюд коливань - див фіг 4), пружини 9 почнуть розтягуватися, намагаючись повернутися у положення рівноваги Вал 13 з диском 14 почне провертатися у зворотний бік У другий період коливань у роботу вступає другий індукційний датчик 11 (на фіг 1 - 2 симетрично розташований відносно осі вала 13 другий індукційний датчик 11 конструктивно не показаний), сигнал з якого, після підсилення у підсилювача збудження 18, буде надходити за допомогою фазоінвертора 27 на два інших діагональне протилежних електромагніта 5, які впливають парою сил F (другого знаку) на силопередавальну феромагнітну пластину 15, при цьому вони будуть надавати їй безконтактне додатковий рух у зворотний бік відносно першого півперюду коливань (див фіг 5) Таким чином, виникають механічні коливання системи "вал - диск - пружини", що не затухають, і синфазні з ними електричні коливання в системі "датчик-підсилювач збудження - електромагніти", частота яких у точності дорівнює частоті власних коливань системи "вал з диском - досліджуване середовище" Вимірювання частоти власних коливань здійснюється за допомогою електроннообчислювального частотоміра 25, сигнал на який надходить з електромагніта 5 (див фіг 1 та фіг 6) Залежно від в'язкості та ЩІЛЬНОСТІ досліджуваного середовища 2, тертя між диском 14, який занурено у досліджуване середовище 2, і середовищем буде різним Наскільки середовище 2 буде близьким до рідкого стану, настільки сила тертя буде меншою, а частота власних крутильних коливань f більшою І навпаки, у досліджуваному середовищі більшої ЩІЛЬНОСТІ сили щеплення середовища 2 і диска 14 можуть бути настільки значними, що при певній (початковій) жорсткості динамічної системи, зусиль від електромагнітів 5 не вистачить, щоб їх подолати У цьому випадку, за допомогою регулювального гвинта 7 індукційний датчик 11, жорстко закріплений на пристосуванні 10, переміщується у бік постійного магніту 17 Зменшення зазору між датчиком 11 і постійним магнітом 17 45811 приводить до того, що збільшується величина сигналу, що виробляється датчиком 11, у вигляді е р с індукції, і, як наслідок, збільшується потужність сигналу, який надходить від підсилювача збудження 26 на електромагніти 5 Водночас, шляхом стискання за допомогою гвинтів 6 пружин 9, здійснюють деяке збільшення частоти обертання валу 13, і, як наслідок, зменшення амплітуди коливань (кута повороту а - див фіг 4 та фіг 5) зазначеного вала 13 Зменшення кута повороту а вала 13 з диском 14 буде сприяти зменшенню сили тертя між середовищем 2 і диском та підвищить чутливість частотно-вибіркової ланки При виконанні контрольного заміру параметрів в'язкості досліджуваного матеріалу 2, якою може бути, наприклад, фарба, нафта, бензин, керосин, спирт, та ІНШІ речовини, заміряють частоту f авторезонансних (власних) коливань частотновибіркової ланки Тертя між собою диска 14 та досліджуваного матеріалу 2 призведе до виникнення дисипативних сил тертя і, як наслідок, до зменшення частоти f авторезонансних коливань системи "вал з диском - досліджуване середовище" Знаючи виміряні раніш еталонні частоти коливань f частотно-вибіркової ланки в ємності з досліджуваним матеріалом 2, параметри якого перевірені іншими методами контролю [4], і порівнюючи їх з показниками частотоміра 25 при контрольному вимірюванні, отримують за номограмою залежності частоти авторезонансних коливань f системи "вал з диском - ємність - досліджуваний матеріал" від в'язкості v досліджуваного матеріалу та температури t оточуючого середовища, величину в'язкості v досліджуваного матеріалу (див номограму на фіг 7) Наприклад, при контрольному вимірюванні в'язкості V досліджуваного матеріалу була отримана частота ивторезонансних коливань f1 Згідно З номограмою, на осі f знаходять величину f1, проводять перпендикуляр до графіка t (на фіг 7 - зазначено t1, t2 та t3), ВІДПОВІДНО ДО температури f2 (як приклад), переходять паралельно базовій осі до графіка зміни в'язкості v і, опускаючи перпендикуляр з точки перетину зазначеного графіка на вісь v, отримують величину фактичної в'язкості v1 досліджуваного матеріалу (див номограму на фіг 7) Якщо контролюють досліджуване середовище більшої ЩІЛЬНОСТІ, сили зчеплення середовища 2 і диска 14 можуть бути настільки значними, що при певній (початковій) жорсткості динамічної системи зусиль від електромагнітів 5 не вистачить, щоб їх подолати У цьому випадку, за допомогою регулювального гвинта 7, індукційний датчик 11, жорстко закріплений на пристосуванні 10, переміщується у бік постійного магніту 17 (N / S) Зменшення зазору між датчиком 11 і постійним магнітом 17 призводить до того, що збільшується величина сигналу, що виробляється датчиком 11, у вигляді є р с індукції, і, як наслідок, збільшується потужність сигналу, який надходить від підсилювача збудження 26 на електромагніти 5 Водночас, шляхом стискання за допомогою гвинтів 6 пружин 9, здійснюють деяке збільшення частоти обертання валу 13, і, як наслідок, зменшення амплітуди коливань (кута повороту а - див фіг 4 та фіг 5) зазначеного 8 вала 13 Зменшення кута повороту а вала 13 з диском 14 буде сприяти зменшенню сили тертя між середовищем 2 і диском та підвищить чутливість частотно-вибіркової ланки Виконання заміру частоти власних (авторезонансних) коливань у другому випадку здійснюється аналогічно вищезазначеному Наприклад, при контрольному вимірюванні в'язкості V досліджуваного матеріалу була отримана частота авторезонансних коливань f2 Згідно з номограмою, на осі f знаходять величину f2, проводять перпендикуляр до графіка t (на фіг 7 - зазначено t1, t2 та t3), ВІДПОВІДНО до температури и (як приклад), переходять паралельно базової осі до графіка зміни в'язкості v, і опускаючи перпендикуляр з точки перетину зазначеного графіка на вісь v, отримують величину фактичної в'язкості V2 досліджуваного матеріалу (див номограму на фіг 7) Після проведення досліджень за допомогою блока керування 28 подають команду на обернений клапан 22, який стравлює тиск повітря з порожнини 19 При цьому паралельно подають команду на частотомір 25, підсилювач збудження 26, джерело живлення 29 та компресор 20, які вимикають з роботи Після ТОГО, КОЛИ ТИСК повітря з порожнини 19 буде стравлено, відкривають замки 18, знімають з ємкості 1 корпус 3, а досліджуване середовище 2 зливають із зазначеної ємності 1 На цьому процес досліджень закінчується Використання як показника в'язкості досліджуваної речовини частоти власних (авторезонансних) коливань дозволить підвищити точність визначення в'язкості досліджуваного середовища, розширити функціональні можливості приладу шляхом вимірювання в'язкості не тільки рідких середовищ, але й середовищ, які мають більшу в'язкість та ЩІЛЬНІСТЬ Використання приладу, що заявляється, можливо не тільки у виробничих умовах, але й у польових, а також зазначений прилад може бути розташовано в конструкції баків для зберігання різноманітних речовин, наприклад, в баках для пального літальних апаратів, в ємностях для зберігання пального на автозаправних станціях, в ємностях для перевезення молока та інше Контроль за вимірюванням фізико-хімічних властивостей вищезазначених речовин, у цьому випадку, може вестись дистанційно, в автоматичному режимі Джерела інформації 1 А с СРСР№717625,1980р, MnKG01N11/16 - аналог 2 с СРСР №238875, 1966р , MnKG01N11/16 - аналог 3 А с СРСР №789704,1980р, MnKG01N11/16 - прототип 4 Н Й Орел, Э В Губачек, Б Й Березин, В М Водолазская «Справочник технологаполиграфиста», часть 5, Печатные краски, М , «Книга», 1988г, стр 188 - 202, §4 3 «Реологические свойства красок для издательских целей» 45811 7 10 5 Фіг. 7 10 5-6 ФІГ. З 11 12 45811 Фіг. 4 В'Яшсть Частота віаснил (аеторезонансник) ко/шаань Фіг. 7 ik Фіг. 5 13 45811 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна (044)456-20- 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71 14
ДивитисяДодаткова інформація
Автори англійськоюNykyforuk Bohdan Vasyliovych, Yershova Emma Oleksandrivna
Автори російськоюНикифорук Богдан Васильевич, Ершова Эмма Александровна
МПК / Мітки
МПК: G01N 11/16
Мітки: прилад, вимірювань, в'язкості
Код посилання
<a href="https://ua.patents.su/7-45811-prilad-dlya-vimiryuvan-vyazkosti.html" target="_blank" rel="follow" title="База патентів України">Прилад для вимірювань в’язкості</a>
Спосіб руйнування масиву складеного крутоспадними пластами гірських порід з різними по міцності і вязкості характеристиками

Номер патенту: 9020
Опубліковано: 30.09.1996
Автори: Ратушний В'ячеслав Михайлович, Бондаренко Микола Анатольович, Димченко Олег Васильович
МПК: E21C 37/00
Мітки: спосіб, крутоспадними, в'язкості, руйнування, масиву, порід, пластами, гірських, міцності, складеного, різними, характеристиками
Мікроелектрод для електрохімічних вимірювань
Номер патенту: 39303
Опубліковано: 15.06.2001
Автори: Гусак Володимир Миколайович, Петрина Дмитро Юрійович, Кустов Віктор Володимирович, Шуляр Ірина Орестівна, Роп'як Любомир Ярославович
МПК: G01N 27/333
Мітки: мікроелектрод, вимірювань, електрохімічних
Формула / Реферат:
Мікроелектрод для електрохімічних вимірювань, що складається з електрода порівняння, з'єднаного з мікрокапіляром, заповненим електролітом, і допоміжного поляризуючого електрода, покритого діелектричною ізоляцією по всій бічній поверхні, приєднаного до стінки мікрокапіляра, який відрізняється тим, що він додатково містить іон-чутливий електрод, покритий діелектричною ізоляцією по всій бічній поверхні, причому допоміжний поляризуючий електрод...
Пристрій для антропометричних вимірювань
Номер патенту: 44434
Опубліковано: 15.02.2002
Автори: Дхаум Хатем Бен Мохамед Сахбі, Одинцова Ольга Юріївна, Руденко Михаіл Модестович, Радочина Світлана Петрівна
МПК: A61B 5/103, G01B 21/22, G01B 3/02, G01B 21/02
Мітки: пристрій, вимірювань, антропометричних
Формула / Реферат:
Пристрій для антропометричних вимірювань, що виконаний у вигляді напівкола з градуйованою у градусах шкалою, розташованою паралельно його сферичній лінії, і має рухому стрілу, розміщену на одній осі з корпусом, який відрізняється тим, що він має додаткову напрямну, яка є продовженням основи корпусу пристрою, крім того, на корпусі виконана проточка шириною 2,5-3,0 мм для можливості переміщення рухомої стріли, а також додатково,...
Генератор для електроімпедансних вимірювань біологічних об’єктів
Номер патенту: 34541
Опубліковано: 15.03.2001
Автори: Тарапун Вячеслав Анатолійович, Сташук Вадим Данилович
МПК: G01R 27/00, A61B 5/05
Мітки: вимірювань, об'єктів, електроімпедансних, біологічних, генератор
Формула / Реферат:
Генератор для електроімпедансних вимірювань біологічних об'єктів, що містить вхідний підсилювач, неінвертуючий вхід якого через перший резистор ввімкнено до керуючого входу генератора, через другий резистор приєднано до корпусу, а інвертуючий вхід через третій резистор приєднано до виходу вхідного підсилювача і через четвертий резистор - до першого виходу генератора, активний і вимірювальний електроди, підсилювач вимірювача струму,...
Генератор для електроімпедансних вимірювань біологічних об’єктів
Номер патенту: 30990
Опубліковано: 15.12.2000
Автори: Сташук Вадим Данилович, Тарапун Вячеслав Анатолійович
МПК: A61B 5/05
Мітки: генератор, біологічних, об'єктів, електроімпедансних, вимірювань
Текст:
...вхід якого ввімкнено до вимірювального електрода, а інвертуючий вхід ввімкнено до захисного електрода, розташованого між активним і вимірювальним електродами, і через третій резистор приєднано до його виходу, який утворює другий вихід генератора. Ввімкнення операційного підсилювача між захисним і вимірювальним електродами вирівнює їх потенціали, тому струм між ними по поверхні шкіри не протікає, а струм між активним і захисним...
Попередній патент: Лікувальний засіб “тім” для місцевого застосування
Наступний патент: Спосіб вимірювання в’язкості
Випадковий патент: Спосіб формування хвилеподібної напруги