Спосіб вимірювання в’язкості
Номер патенту: 36137
Опубліковано: 10.10.2008
Автори: Зайківський Олександр Болеславович, Петрашова Ольга Миколаївна, Єршова Емма Олександрівна, Швець Юрій Володимирович, Воробйов Віталій Іванович
Формула / Реферат
Спосіб вимірювання в'язкості, при якому проводять занурення чутливого елемента, виконаного у вигляді датчика в'язкості, у досліджуване середовище і збудження коливань датчика в'язкості з наступним вимірюванням амплітуди коливань зазначеного датчика в'язкості, який відрізняється тим, що підвищують тиск досліджуваного середовища, при досягненні тиску відповідної величини, яка визначена технічними характеристиками приладу, змінюють температуру досліджуваного середовища до стандартної, при досягненні досліджуваним середовищем стандартної температури 20 °С збуджують коливання зонда з власною частотою, а величину в'язкості досліджуваного середовища визначають за параметрами зміни амплітуди і частоти власних коливань.
Текст
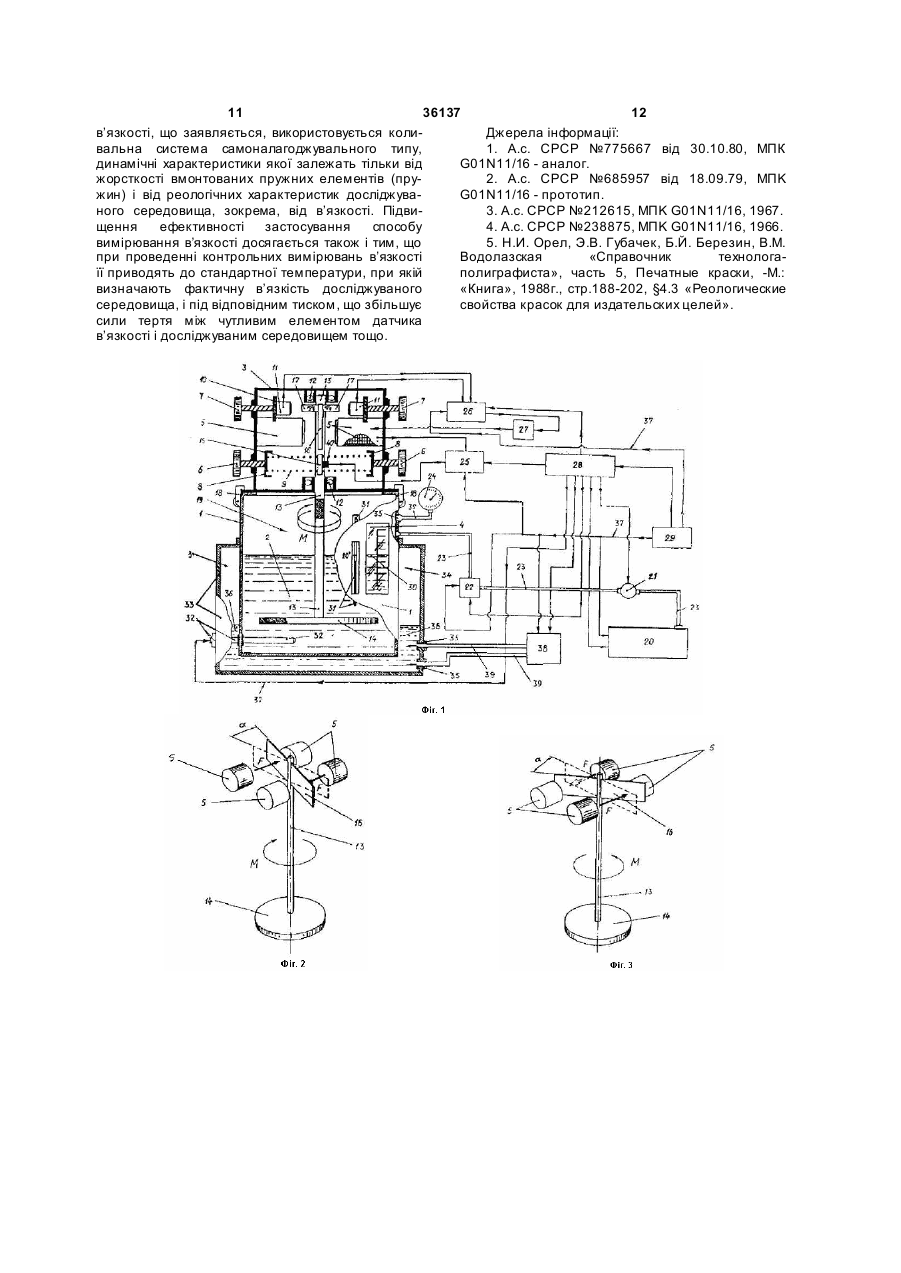
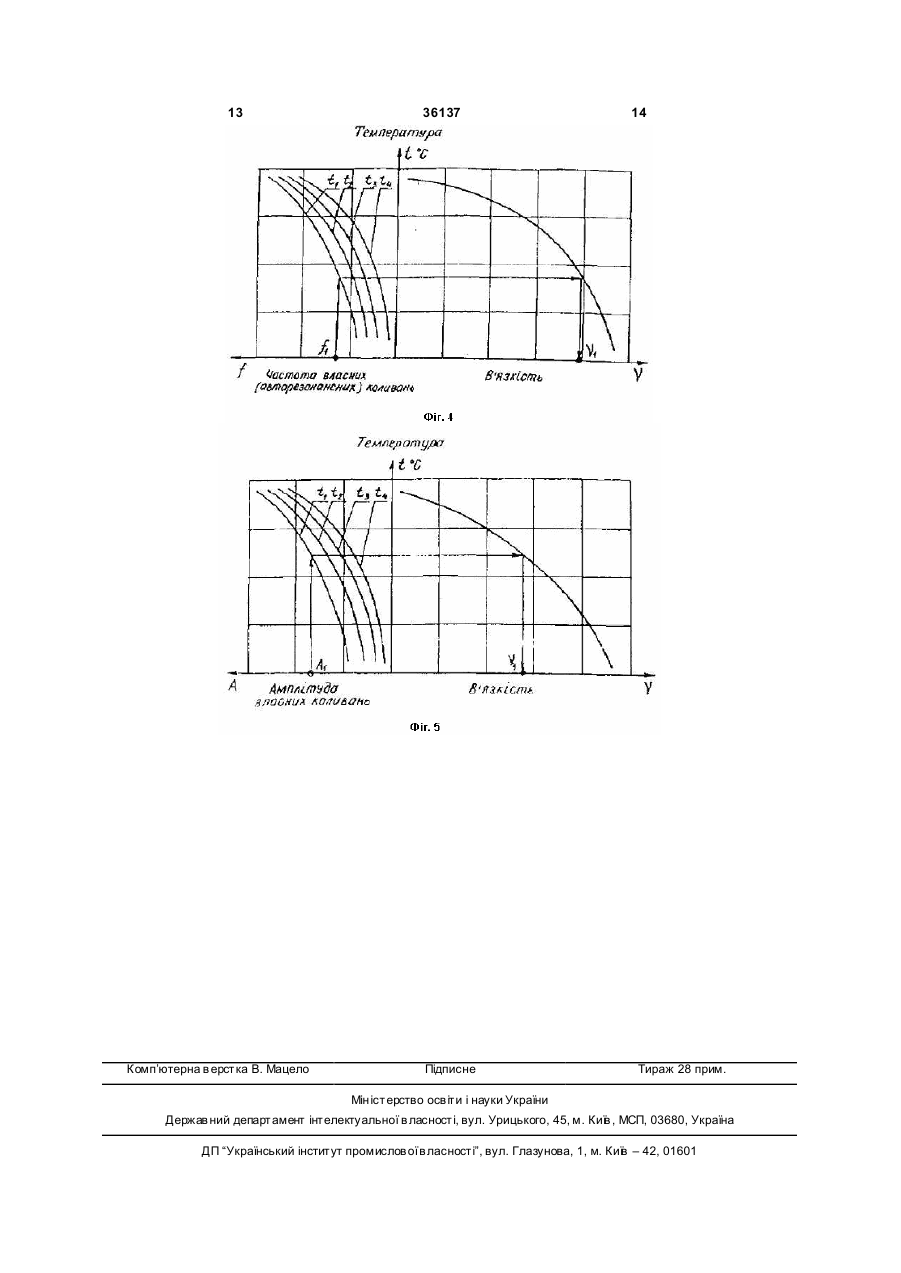
Спосіб вимірювання в'язкості, при якому проводять занурення чутливого елемента, виконаного 3 36137 4 У зв’язку з цим неможливо встановити залежність який містить, як варіант конструктивного виконанамплітуди коливань від в’язкості досліджуваного ня (див. Фіг.1), ємність 1 для досліджуваного сересередовища. Можлива для вимірювання зміна довища 2, яка з’єднана певним чином з корпусом амплітуди коливань відбувається тільки у середо3. На корпусі 3 виконане вікно 4, на прозорій часвищі із значною в’язкістю, наприклад, у смолі, бетині якого нанесена координатна сітка. Усередині тонній суміші, піску, фарбах. До того ж недоліками корпусу 3 жорстко закріплені електромагніти 5, які відомого способу визначення в’язкості є й те, що встановлені симетрично і попарно співвісно. Зовні замір параметрів проводять за різної температури корпусу 3 розташовані регулювальні гвинти 6 і 7. досліджуваного середовища, а в’язкість його виГвинт 6 конструктивно виконаний зв’язаним з призначають в лабораторних умовах за стандартної стосуванням 8 для затягування пружини 9, а гвинт температури 20°С. Недооцінка температурного 7 - з пристосуванням 10 для переміщення індукфактора буде призводити до накопичування похиційних датчиків 11, жорстко закріплених на пристобок при визначенні фактичної величини в’язкості. суванні 10. Усередині корпусу 3 в підшипниках В основу корисної моделі поставлена задача кочення 12 закріплений датчик в’язкості, який шляхом підвищення чутливості засобу вимірюконструктивно являє собою вал 13 з диском 14 на вань, що використовується, та урахування темпейого вільному кінці, при цьому диск 14 встановлературного фактора забезпечити підвищення доно своєю площиною перпендикулярно осі вала 13. стовірності вимірювання величини в’язкості На валу 13 жорстко закріплені силопередавальні досліджуваного середовища. феромагнітні пластини 15 і 16. Кожну з пластин 15 Суть корисної моделі в способі вимірювання і 16 розташовано в одній площині, що проходить в’язкості, при якому проводять занурення чутливокрізь вісь вала 13. Як варіант конструктивного виго елемента, виконаного у вигляді датчика конання, пластини 15 і 16 можуть бути розміщені в’язкості, у досліджуване середовище і збудження як в одній площині, так і під кутом одна до одної коливань датчика в’язкості з наступним вимірювідносно осі вала 13. На пластини 15 опираються ванням амплітуди коливань зазначеного датчика пружини 9, а на пластинах 16 закріплені постійні в’язкості, досягається тим, що підвищують тиск магніти 17, при цьому пружини 9 опираються оддосліджуваного середовища, при досягненні тиску ним кінцем на пластини 15, а другим - на пристовідповідної величини, яка визначена технічними сування 8. Пластини 16 розміщені між електромагхарактеристиками приладу, змінюють температуру нітами 5. Корпус 3 приладу кріпиться до ємності 1 досліджуваного середовища до стандартної, і при за допомогою замків 18. Внутрішні стінки ємності 1 досягненні досліджуваним середовищем стандарі корпус 3 утворюють герметичну порожнину 19. тної температури 20°С збуджуються коливання Система підвищення тиску виконана такою, що зонда з власною частотою, а величину в’язкості містить компресор 20, вихід якого виконаний сподосліджуваного середовища визначають за паралученим з герметичною порожниною 19 приладу метрами зміни амплітуди і частоти власних количерез редуктор 21 та зворотний клапан 22 за довань. помогою гнучких шлангів 23. Герметична порожниПорівняльний аналіз технічного рішення, що на 19 виконана сполученою з манометром 24 сисзаявляється, з прототипом, дозволяє зробити витеми підвищення тиску. Ви хід електромагнітів 5 сновок, що спосіб вимірювання в’язкості, що заяввиконаний сполученим з реєстраційним приладом ляється, відрізняється тим, що підвищують тиск 25. Як реєстраційний прилад 25 може бути викодосліджуваного середовища, при досягненні тиску ристаний реєстратор лінійних переміщень датчика відповідної величини, яка визначена технічними в’язкості та з’єднаний з ним електроннохарактеристиками приладу, змінюють температуру обчислювальний частотомір. Виходи індукційних досліджуваного середовища до стандартної, і при датчиків 11 виконані сполученими з електромагнідосягненні досліджуваним середовищем стандартами 5 послідовно через підсилювач збудження тної температури 20°С збуджуються коливання коливань 26 і фазоінвертор 27, а виходи блоку зонда з власною частотою, а величину в’язкості керування 28 виконані сполученими з входами досліджуваного середовища визначають за парареєстраційного приладу 25, підсилювача збудженметрами зміни амплітуди і частоти власних колиня коливань 26, джерела живлення 29, компресовань. ра 20 і зворотного клапана 22 системи підвищення Таким чином, спосіб вимірювання в’язкості, що тиску (див. Фіг.1). Виходи джерела живлення 29 заявляється, відповідає критерію «новизна». виконані сполученими з входами підсилювача збуСуть способу вимірювання в’язкості рідких редження коливань 26, реєстраційного приладу 25, човин пояснюється за допомогою креслень, де на блока керування 28 та компресора 20 (див. Фіг.1). Фіг.1 наведено конструктивно-компонувальну схеНа координатній сітці, що нанесена на прозорому му приладу, за допомогою якого проводять виміматеріалі вікна 4, виконана контрольна мітка 30, рювання в’язкості досліджуваного середовища, на яка визначає рівень заповнення ємності 1 досліФіг.2-3 наведені схеми роботи датчика в’язкості, джуваним матеріалом 2 (середовищем). Ємність 1 відповідно у першому і другому напівперіодах його виконують (як варіант конструкції) у вигляді цилінколивань, на Фіг.4-5 наведено залежність частоти f дра з закритою нижньою частиною. Усередині корвласних (авторезонансних) коливань і амплітуди А пусу ємності 1 встановлюють термометр 31 та нагрівальний елемент 32. Корпус ємності 1 додатколивань датчика в’язкості від в’язкості n досліджуваного середовища та його температури t. ково оснащують зовнішньою стінкою 33, яку встановлюють на віддалі від базової стінки корпусу. Для пояснення суті корисної моделі вибране При цьому конструктивно виконують порожнину устаткування, наприклад, у вигляді вібраційного 34, яка утворюється базовою стінкою корпусу ємвіскозиметра (пристрою для вимірювань в’язкості), 5 36137 6 ності 1 і додатковою стінкою 33, герметично закрив’язкості буде відповідати визначене значення v тою. Для підведення у внутрішню порожнину 34 в’язкості матеріалу (речовини) 2. охолодженої або нагрітої речовини, наприклад, Аналогічно за одержаними внаслідок контроводи, азоту, пару, на стінці 33 встановлюють патлю значеннями частоти f власних коливань і відорубки 35 для підведення зазначеної охолодженої мих величин в’язкості v матеріалу (речовини) 2 за або нагрітої речовини (позиція 36). Виходи нагрістандартної температури досліджуваного середовального елемента 32 з’єднують з джерелом живвища 20°С будують графік залежності частоти f лення 29 за допомогою електричного дроту 37 власних коливань датчика в’язкості від в’язкості v через блок керування 28. Для підведення у вн утматеріалу (речовини) 2 та температури t (див. рішню порожнину 34 охолодженої або нагрітої реФіг.4). Відповідно до графіка залежності f=f(n, t), човини, наприклад, води, азоту, пару, використокожному із значень f частоти власних коливань вують електричний насос 38, входи електричної датчика в’язкості буде відповідати визначене значастини якого виконані сполученими з джерелом чення v в’язкості матеріалу (речовини) 2. живлення 29 через блок керування 28. Патрубки Маючи тарувальний графік залежності частоти 35 для підведення зазначеної охолодженої або f власних коливань та амплітуди А власних колинагрітої речовини (позиція 36), що виконані на зовань датчика в’язкості від в’язкості n матеріалу внішній стінці 33, сполучені з насосом 38 за допо(речовини) 2 та температури t, приступають до могою трубопроводів 39. На пластині 15 жорстко досліджень з використанням приладу, за допомозакріплено датчик 40 лінійних переміщень, вихід гою якого виконувались контрольні вимірювання якого виконаний сполученим з входом реєстраційчастоти f власних коливань і амплітуди А власних ного приладу 25, а саме з реєстратором лінійних коливань датчика в’язкості. переміщень. Прилад для вимірювань в’язкості працює наСуть способу вимірювання в’язкості рідких реступним чином. човин пояснюється за допомогою устаткування Перед початком досліджень заповнюють ємдля цієї мети, наприклад, приладу для вимірювань ність 1 досліджуваним матеріалом (рідкою речов’язкості (коливального віскозиметра), конструкція виною) 2 до визначеного рівня, при цьому рівень якого наведена у [3], або за допомогою інших придосліджуваного середовища (матеріалу) 2 повиладів [4]. Кожен з вищезазначених приладів міснен знаходитись у відповідності до контрольної тить датчик в’язкості, закріплений із можливістю мітки 30. Для заповнення ємності 1 досліджуваним здійснення крутильних коливань, і систему збуматеріалом 2 відкриваються замки 18, і корпус 3 дження коливань датчика в’язкості, що містить разом з конструктивними елементами підіймаєтьелектровібратори, індукційні датчики, магніт, закріся. Відкрита ємність 1 заповнюється на таку велиплений на датчику в’язкості з можливістю взаємочину, щоб диск 14 був занурений у досліджуване дії з індукційними датчиками, підсилювач низькосередовище 2 не менш ніж на 1/2 довжини вала 13 частотних коливань і прилад, який реєструє (що відповідає рівню, зазначеному контрольною амплітуду і частоту коливань. Як прилад, який реміткою 30). Величина заповнення ємності 1 контєструє амплітуду коливань, може бути використаролюється за допомогою контрольної мітки 30 на ний реєстратор лінійних переміщень датчика координатній сітці, що нанесена на прозорий мав’язкості. Як прилад, який реєструє частоту властеріал, який закриває вікно 4. них (авторезонансних) коливань, може бути викоПотім корпус 3 за допомогою замків 18 закріпристаний електронно-обчислювальний частотомір. люють на ємності 1. При цьому утворюється герПри цьому датчик в’язкості і електровібратори метична порожнина 19. включені у частотно-вибіркову ланку системи збуПісля проведення зазначених технологічних дження коливань, що реагують на зміну в’язкості операцій проводять вимірювання температури середовища, у яке занурений датчик в’язкості. досліджуваного середовища (матеріалу) 2, наприПопередньо проводять тарування приладу клад, за допомогою термометра 31. Якщо темпедля вимірювань в’язкості за еталонними значенратура досліджуваного матеріалу (рідкої речовинями величин в’язкості n матеріалу (речовини) 2, ни) 2 не відповідає стандартній, а саме, 20°С, то її що отримані за допомогою інших відомих методів приводять у відповідність до стандартної темпераконтролю, наведених, наприклад, у [5]. Для цього тури t=20°С. Наприклад, якщо температура дослідоводять температуру t досліджуваного середоджуваного матеріалу (рідкої речовини) 2 менше вища до стандартної температури, яка дорівнює ніж 20°С, то за допомогою блоку керування 28 20°С, збуджують коливання датчика в’язкості з вмикають нагрівальний елемент 32, який зануревласною частотою f і приводять до відповідності ний у досліджуваний матеріал (речовину) 2, що амплітуду А власних коливань датчика в’язкості з знаходиться у ємності 1, і нагрівають досліджував’язкістю n матеріалу (речовини) 2 для кожного з ний матеріал 2 до відповідної температури t=20°С. численних досліджуваних матеріалів (речовин) 2. Або для нагрівання досліджуваного матеріалу (ріЗа одержаними внаслідок контролю значеннями дкої речовини) 2 використовують метод пропусамплітуди А власних коливань і відомих величин кання нагрітої речовини, наприклад, газу або води (позиція 36), крізь порожнину 34 між корпусом ємв’язкості n матеріалу (речовини) 2 за стандартної ності 1 та додатковою зовнішньою стінкою 33. Для температури досліджуваного середовища 20°С будують графік залежності амплітуди А власних цього використовують електричний насос 38 (як варіант конструктивного виконання приладу). Вмиколивань датчика в’язкості від в’язкості n матеріакання насосу 38 здійснюється за допомогою блоку лу (речовини) 2 та температури t (див. Фіг.5). Відкерування 28, який подає команду на з’єднання повідно до графіка залежності А=f(n, t), кожному із електричного дроту 37 від джерела живлення 29 з значень А амплітуди власних коливань датчика 7 36137 8 двигуном насоса. При роботі насоса 38 нагріта За допомогою блока керування 28 вмикають речовина 36 подається трубопроводом 39 крізь компресор 20 і стиснуте повітря через регулятор патрубок 35 до внутрішньої порожнини 34 між кортиску 21 і зворотний клапан 22 подається гнучкими пусом ємності 1 та додатковою зовнішньою стіншлангами 23 в герметичну порожнину 19 приладу. кою 33, а із зазначеної порожнини 34 під тиском Тиск повітря в герметичній порожнині 19 контровиштовхується в магістраль зливу. Циркуляція люється за допомогою манометра 24. При досягнагрітої речовини 36 призводить до нагрівання ненні тиску повітря в порожнині 19 визначеної ведосліджуваного середовища 2 до температури, личини (яка задається технічними яка задається нормативними параметрами, а саме характеристиками приладу) компресор 20 вимикадо стандартної температури t=20°С. Якщо темпеється, а зворотний клапан 22 утримує тиск повітря ратура досліджуваного матеріалу (рідкої речовизазначеної величини в порожнині 19 приладу. ни) 2 більше ніж 20°С, то для охолодження досліПри вмиканні приладу в роботу за допомогою джуваного матеріалу (рідкої речовини) 2 блоку керування 28, в індукційному датчику 11, використовують метод пропускання холодної реякий знаходиться в магнітному полі постійного човини, наприклад, газу, азоту або води (позиція магніту 17, відпрацьовується сигнал у вигляді еле36) крізь порожнину 34 між корпусом ємності 1 та ктрорушійної сили (ЕРС) індукції. При цьому індукдодатковою зовнішньою стінкою 33 (як показано ційні датчики 11 і постійні магніти 17 встановлені вище). У цьому разі при роботі насоса 38 охолотак, що ЕРС відпрацьовується тільки в одному з джувальна речовина 36 подається трубопроводом датчиків 11. Сигнал з цього датчика 11 через фа39 крізь патрубок 35 до внутрішньої порожнини 34 зоінвертор 27 подається на підсилювач збудження між корпусом ємності 1 та додатковою зовнішньою коливань 26, де здійснюється його підсилювання і стінкою 33, а із зазначеної порожнини 34 під тисдалі, за допомогою фазоінвертора 27, на діагонаком виштовхується в магістраль зливу. Циркуляція льно-протилежні магніти 5 (див. Фіг.1). Електромаохолоджувальної речовини 36 призводить до охогніти 5 (до яких підведений підсилений сигнал) лодження досліджуваного середовища 2 до темпочинають діяти на сило передавальну феромагператури, яка задається нормативними параметнітну пластину 15 парою сил F відносно осі оберрами, а саме до стандартної температури t=20°С. тання вала 13. При цьому вал 13 буде повертатиНасос 38 може, як варіант конструктивного вися у підшипниках кочення 12 у напрямку моменту конання, працювати в автоматичному режимі, підМ, створеного парою сил F від електромагнітів 5 тримуючи температуру досліджуваного середови(див. Фіг.2). Діагонально протилежні (відносно ща 2 у відповідності до температури, яка працюючих електромагнітів 5) пружини 9 почнуть задається нормативними параметрами, а саме до стискуватися, накопичуючи енергію. При досягстандартної температури t=20°С. ненні положення рівноваги, при якому сила від Водночас з приведенням досліджуваного маелектромагнітів 5 буде дорівнювати силі затягутеріалу 2 до стандартної температури 20°С, виховання пружини 9, сигнал на працюючому індукційди індукційних датчиків 11 і електровібраторів 5 ному датчику 11 буде дорівнювати "нулю", а тому і приладу з’єднують електричними дротами 37 з "нулю" на електромагнітах 5. Не отримуючи провходами, відповідно, підсилювача збудження котидії з боку електромагнітів 5 (задіяних у перший ливань 26 і реєстраційного приладу 25 (реєстранапівперіод коливань - див. Фіг.2), пружини 9 потора лінійних переміщень датчика в’язкості і часчнуть розтискуватися, намагаючись повернутися тотоміра). Виходи підсилювача збудження до положення рівноваги. Вал 13 з диском 14 почне коливань 26 і реєстраційного приладу 25 з’єднують повертатися у зворотний бік. У другий період коелектричним дротом 37 з входом джерела живливань у роботу вступає інший індукційний датчик лення 29 (див. Фіг.1). Проводять перевірку відпові11, сигнал з якого, після підсилення у підсилювачі дності температури досліджуваного матеріалу 2 збудження коливань 26, буде надходити за допостандартній температурі 20°С (за допомогою термогою фазоінвертора 27 на два інших діагонально мометра 31) та занурення робочого органа (диска протилежних електромагніта 5, які впливають па14) у досліджуваний матеріал (середовище) 2. рою сил F (іншого знаку) на сило-передавальну Диск 14 датчика в’язкості повинен бути цілком заферомагнітну пластину 15, при цьому вони будуть нуреним у згаданий досліджуваний матеріал (сенадавати їй безконтактно додатковий рух у звороредовище) 2. тний бік відносно першого напівперіоду коливань При досягненні відповідності вищезазначеним (див. Фіг.3). вимогам щодо температури (t=20°С) досліджуваного матеріалу 2 та положення занурення диска 14 Таким чином, виникають механічні коливання датчика в’язкості у досліджуваний матеріал 2 вмисистеми "вал – диск -пружини", що не затухають з кають джерело живлення 29 і подають живлення часом, і синфазні з ними електричні коливання в на підсилювач збудження коливань 26 і реєстрасистемі "датчик - підсилювач збудження коливань ційний прилад 25. електромагніти", частота яких точно дорівнює часПри підключенні джерела живлення 29 до підтоті власних коливань системи "вал з диском силювача збудження коливань 26 і реєстраційного досліджуване середовище". приладу 25, а блоку керування 28 - до входів часВимірювання частоти f власних коливань здійтотоміра 25, підсилювача збудження коливань 26, снюється за допомогою реєстраційного приладу джерела живлення 29, компресора 20, зворотного 25 (електронно-обчислювального частотоміра), клапана 22 системи підвищення тиску, а також сигнал на який надходить з електромагніту 5. Винасосу 38, - прилад для вимірювань в’язкості готомірювання амплітуди А власних коливань здійснювий до роботи. ється за допомогою реєстраційного приладу 25 9 36137 10 (реєстратора лінійних переміщень), сигнал на який За допомогою реєстраційного приладу 25 (нанадходить з датчика 40 лінійних переміщень. приклад, реєстратора лінійних переміщень датчиЗалежно від в’язкості та щільності досліджувака в’язкості) визначають фактичну амплітуду А1 ного середовища 2, тертя між диском 14, який завласних коливань датчика в’язкості, що буде віднурений у досліджуване середовище 2, і середоповідати фактичному значенню в’язкості n 1 дослівищем буде різним. Наскільки середовище 2 буде джуваного матеріалу (рідкої речовини) 2. Для цьоблизьким до рідкого становища, настільки і сила го на графіку залежності А=f (n, t) на осі А тертя буде меншою, а частота власних крутильних вибирають фактичне значення амплітуди А1 власколивань f і амплітуда А - більшими. І навпаки, у них коливань, проводять перпендикуляр до передосліджуваному середовищі більшої щільності тину з t (на Фіг.5 зазначено t1, t2, t 3 та t4) відповідно сили зчеплення середовища 2 і диска 14 можуть до температури t1 (як приклад), переходять парабути настільки значними, що при певній (початколельно базовій осі до графіка зміни в’язкості n і, вій) жорсткості динамічної системи зусиль від елеопускаючи перпендикуляр з точки перетину зазнактромагнітів 5 не вистачить, щоб їх подолати. У ченого графіка на вісь n, отримують величину факцьому випадку, за допомогою регулювального гвитичної в’язкості n 1 досліджуваного матеріалу (див. нта 7, Індукційний датчик 11, жорстко закріплений номограму на Фіг.5). Отримане значення в’язкості на пристосуванні 10, перемішується у бік постійноn 1 буде відповідати фактичній в’язкості n 1 досліго магніту 17. Зменшення зазору між датчиком 11 і джуваного матеріалу (рідкої речовини) 2 (див. постійним магнітом 17 призводить до того, що збіФіг.5). льшується величина сигналу, що виробляється Для спрощення операції визначення фактичдатчиком 11, у вигляді ЕРС індукції і, як наслідок, ної величини в’язкості n прилад 25, який реєструє збільшується потужність сигналу, який надходить частоту f власних (авторезонансних) коливань і від підсилювача збудження коливань 26 на електамплітуду А коливань, можна відградуювати за ромагніти 5. Одночасно, шляхом стиснення за допоказниками в’язкості. помогою гвинтів 6 пружин 9, здійснюють деяке Після проведення досліджень за допомогою збільшення частоти обертання вала 13 і, як насліблоку керування 28 подають команду на зворотдок, зменшення амплітуди коливань (кута повороний клапан 22, який зменшує тиск повітря у пороту a - див. Фіг.2 та Фіг.3) зазначеного вала 13. жнині 19. При цьому паралельно подають команду Зменшення кута повороту a вала 13 з диском 14 на реєстраційний прилад 25, підсилювач збудженбуде сприяти зменшенню сили тертя між середоня коливань 26, джерело живлення 29, насос 38 та вищем 2 і диском та підвищить чутливість частоткомпресор 20, які вимикають з роботи. Після того, но-вибіркової ланки. як тиск повітря у порожнині 19 буде зменшено, При виконанні контрольного заміру параметрів відкривають замки 18, знімають з ємності 1 корпус в’язкості досліджуваного матеріалу 2, яким можуть 3, а досліджуване середовище 2 зливають із забути, наприклад, фарба, нафта, бензин, гас, спирт значеної ємності 1. та інші речовини, вимірюють частоту f авторезонаНа цьому процес дослідження закінчується. нсних (власних) коливань частотно-вибіркової Використання як показника в’язкості досліджуланки. Тертя між диском 14 та досліджуваним маваної речовини частоти власних (авторезонанстеріалом 2 призведе до виникнення дисипативних них) коливань та амплітуди власних коливань досил тертя і, як наслідок, до зменшення частоти f зволить підвищити точність вимірювання в’язкості авторезонансних коливань системи "вал з диском досліджуваного середовища, розширити функціодосліджуване середовище". Знаючи виміряні ранальні можливості пристрою шляхом вимірювання ніше еталонні частоти коливань f частотнов’язкості не тільки рідких середовищ, але й серевибіркової ланки в ємності з досліджуваним матедовищ, які мають більшу в’язкість та щільність. ріалом 2, параметри якого перевірені іншими меВикористання приладу, який пропонується для тодами контролю [4]) і порівнюючи їх з показникавикористання зазначеного способу, можливо не ми реєстраційного приладу 25 при контрольному тільки у виробничих умовах, але й у польових. вимірюванні, отримують за номограмою залежносЗазначений прилад також може бути розташоваті частоти авторезонансних коливань f системи ним у конструкції баків для зберігання різноманіт"вал з диском - ємність - досліджуваний матеріал" них речовин, наприклад, у баках для пального лівід в’язкості n досліджуваного матеріалу та темпетальних апаратів, в ємностях для зберігання ратури t навколишнього середовища, величину пального на автозаправних станціях, в ємностях в’язкості n досліджуваного матеріалу (див. номодля перевезення фарби, молока та інше. Контроль граму на Фіг.4). Наприклад, при контрольному виза вимірюванням фізико-хімічних властивостей мірюванні в’язкості n досліджуваного матеріалу вищезазначених речовин у цьому випадку може була отримана частота авторезонансних коливань вестись дистанційно, в автоматичному режимі. f1. Згідно з номограмою, на осі f знаходять величиПідвищення ефективності застосування спону f 1, проводять перпендикуляр до графіка t (на собу вимірювання в’язкості, що заявляється, у Фіг.4 - зазначено t1, t2, t3 та t4) відповідно до темпепорівнянні з прототипом, досягається за рахунок ратури t1 (як приклад), переходять паралельно підвищення точності визначення частоти і амплібазовій осі до графіка зміни в’язкості n і, опускаютуди коливань чутливого елемента, зануреного у чи перпендикуляр з точки перетину зазначеного досліджуване середовище, а саме за рахунок виграфіка на вісь n, отримують величину фактичної користання авторезонансних режимів коливань динамічної системи, які найбільш точно відобрав’язкості n 1 досліджуваного матеріалу (див. номожають зміну впливу величини в’язкості на згадану граму на Фіг.4). динамічну систему. У способі вимірювання 11 36137 12 в’язкості, що заявляється, використовується колиДжерела інформації: вальна система самоналагоджувального типу, 1. А.с. СРСР №775667 від 30.10.80, МПК динамічні характеристики якої залежать тільки від G01N11/16 - аналог. жорсткості вмонтованих пружних елементів (пру2. А.с. СРСР №685957 від 18.09.79, MПK жин) і від реологічних характеристик досліджуваG01N11/16 - прототип. ного середовища, зокрема, від в’язкості. Підви3. А.с. СРСР №212615, MПK G01N11/16, 1967. щення ефективності застосування способу 4. А.с. СРСР №238875, MПK G01N11/16, 1966. вимірювання в’язкості досягається також і тим, що 5. Н.И. Орел, Э.В. Губачек, Б.Й. Березин, В.М. при проведенні контрольних вимірювань в’язкості Водолазская «Справочник технологаїї приводять до стандартної температури, при якій полиграфиста», часть 5, Печатные краски, -М.: визначають фактичну в’язкість досліджуваного «Книга», 1988г., стр.188-202, §4.3 «Реологические середовища, і під відповідним тиском, що збільшує свойства красок для издательских целей». сили тертя між чутливим елементом датчика в’язкості і досліджуваним середовищем тощо. 13 Комп’ютерна в ерстка В. Мацело 36137 Підписне 14 Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod fr measurement of viscosity
Автори англійськоюVorobiov Vitalii Ivanovych, Yershova Emma Oleksandrivna, Zaikivskyi Oleksandr Boleslavovych, Petrashova Olha Mykolaivna, Shvets Yurii Volodymyrovych
Назва патенту російськоюСпособ измерения вязкости
Автори російськоюВоробьев Виталий Иванович, Ершова Эмма Александровна, Зайкивский Александр Болеславович, Петрашова Ольга Николаевна, Швец Юрий Владимирович
МПК / Мітки
МПК: G01N 11/16
Мітки: в'язкості, вимірювання, спосіб
Код посилання
<a href="https://ua.patents.su/7-36137-sposib-vimiryuvannya-vyazkosti.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання в’язкості</a>
Спосіб вимірювання в’язкості
Номер патенту: 45812
Опубліковано: 15.04.2002
Автори: Никифорук Богдан Васильович, Єршова Емма Олександрівна
МПК: G01N 11/16
Мітки: в'язкості, спосіб, вимірювання
Формула / Реферат:
Спосіб вимірювання в'язкості, при якому проводять занурення чутливого елемента, виконаного у вигляді датчика в'язкості, у досліджуване середовище і збудження коливань датчика в'язкості з наступним виміром амплітуди коливань зазначеного датчика в'язкості, який відрізняється тим, що підвищують тиск досліджуваного середовища, при досягненні тиску відповідної величини, яка зазначена технічними характеристиками приладу, змінюють температуру...
Спосіб визначення в’язкості
Номер патенту: 44152
Опубліковано: 15.01.2002
Автори: Єршова Емма Олександрівна, Никифорук Богдан Васильович
МПК: G01N 11/16
Мітки: визначення, спосіб, в'язкості
Формула / Реферат:
Спосіб визначення в'язкості дисперсного середовища, що містить занурення чутливого елемента, виконаного у вигляді зонда, у досліджуване середовище, і збудження коливань зонда з наступним виміром амплітуди його коливань, якими відрізняється тим, що збуджують коливання зонда з власною/авторезонансною частотою, заміряють частоту і амплітуду власних/авторезонансних коливань зонда без занурення його у досліджуване середовище, заміряють при цьому...
Спосіб руйнування масиву складеного крутоспадними пластами гірських порід з різними по міцності і вязкості характеристиками

Номер патенту: 9020
Опубліковано: 30.09.1996
Автори: Бондаренко Микола Анатольович, Ратушний В'ячеслав Михайлович, Димченко Олег Васильович
МПК: E21C 37/00
Мітки: спосіб, пластами, в'язкості, масиву, різними, складеного, міцності, порід, гірських, характеристиками, руйнування, крутоспадними
Спосіб визначення в’язкості речовин
Номер патенту: 36055
Опубліковано: 10.10.2008
Автори: Зайківський Олександр Болеславович, Швець Юрій Володимирович, Єршова Емма Олександрівна, Воробйов Віталій Іванович
МПК: G01N 11/16
Мітки: спосіб, визначення, в'язкості, речовин
Формула / Реферат:
Спосіб визначення в'язкості рідких речовин, що полягає у зануренні чутливого елемента, виконаного у вигляді зонда, у досліджуване середовище, подачі електричного струму до системи збудження коливань чутливого елемента, збудженні коливань зонда і визначенні значення в'язкості речовини за зміною параметрів коливальної системи, що зв'язана з величиною в'язкості речовини, який відрізняється тим, що збуджують коливання зонда з власною частотою, а...
Спосіб автоматизованого вимірювання в`язкості біологічних рідин безелектродним методом
Номер патенту: 35766
Опубліковано: 10.10.2008
Автори: Пішак Василь Павлович, Шаплавський Микола Володимирович, Григоришин Петро Михайлович, Слободян Оксана Всеволодівна
МПК: A61B 5/00
Мітки: біологічних, вимірювання, методом, в'язкості, автоматизованого, спосіб, рідин, безелектродним
Формула / Реферат:
Спосіб автоматизованого вимірювання в'язкості біологічних рідин безелектродним методом шляхом вимірювання параметрів рідини, що рухається через контур певного об'єму, який відрізняється тим, що додатково проводять автоматичну комп'ютерну реєстрацію напруги на виході приладу (вимірювач добротності ВМ-560) та однозначно її переводять у добротність коливального контуру, а вимірювання в'язкості проводять за графічною залежністю коливального...
Попередній патент: Прилад для вимірювань в`язкості
Наступний патент: Насос вібраційний
Випадковий патент: Капілярний електродний вузол