Пристрій для підйому затонулого об’єкта
Номер патенту: 36582
Опубліковано: 15.06.2004
Автори: Галь Анатолій Феодосійович, Бугаєнко Борис Андрійович
Формула / Реферат
1. Пристрій для підйому затонулого об'єкта, що містить надводний плавзасіб, захоплювач і канатну систему підйому з одного або декількох тягових канатів, одні кінці яких заведені на барабани підйомних лебідок, розташованих на борту надводного плавзасобу, а інші їхні кінці сполучені з захоплювачем, при цьому тягові канати розташовані по обох бортах надводного плавзасобу, який відрізняється тим, що захоплювач виконано у вигляді подовжнього ряду порожнистих понтонів, що продуваються, до яких шарнірно закріплена група лап для обхоплення корпусу затонулого об'єкта у декількох місцях, причому лапи захоплювача сполучені з приводом, а понтони мають у тривкому корпусі наскрізні проходи, через які пропущено гнучкий елемент, закріплений на двох крайніх понтонах за допомогою вузлів жорсткого кріплення.
2. Пристрій за п. 1, який відрізняється тим, що лапи захоплювача виконані з різноманітною конфігурацією по довжині ряду порожнистих понтонів, які продуваються, таким чином, що контур обхоплення кінцевих ланок лап у поперечних перерізах наближений до форми затонулого об'єкта, який обхоплюється.
3. Пристрій за пп. 1 або 2, який відрізняється тим, що поверхні понтонів з боків наскрізних проходів виконані у вигляді частини сфери.
Текст
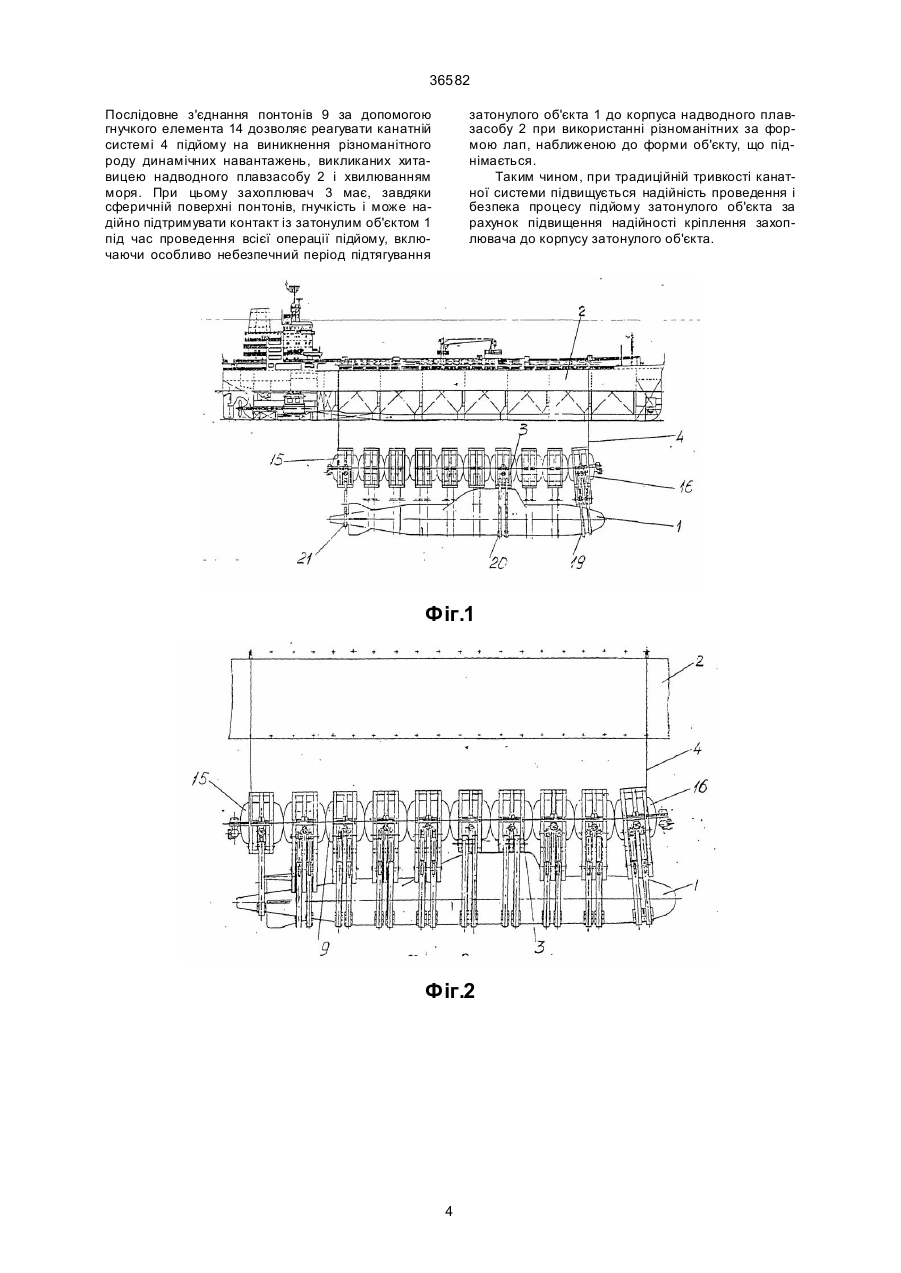
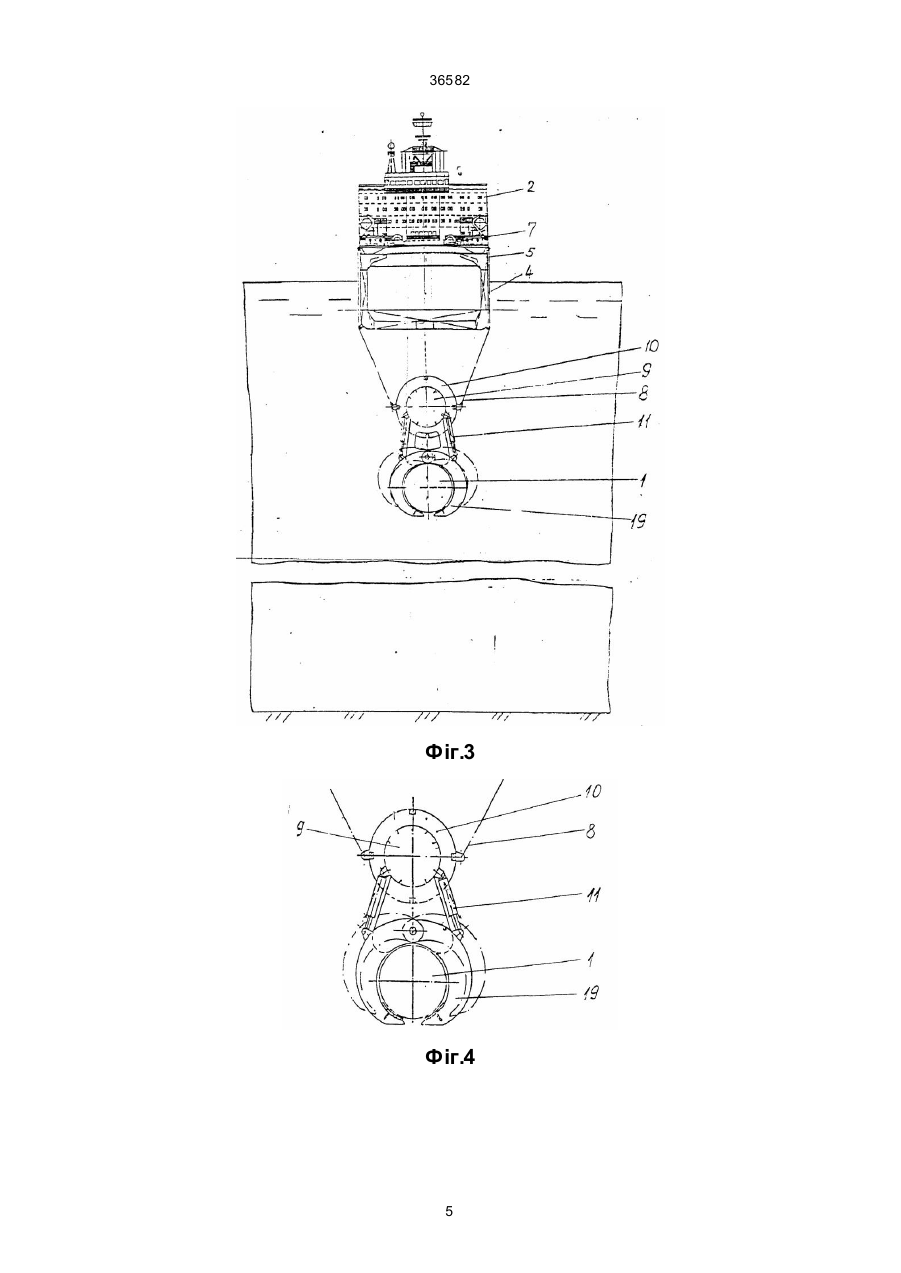
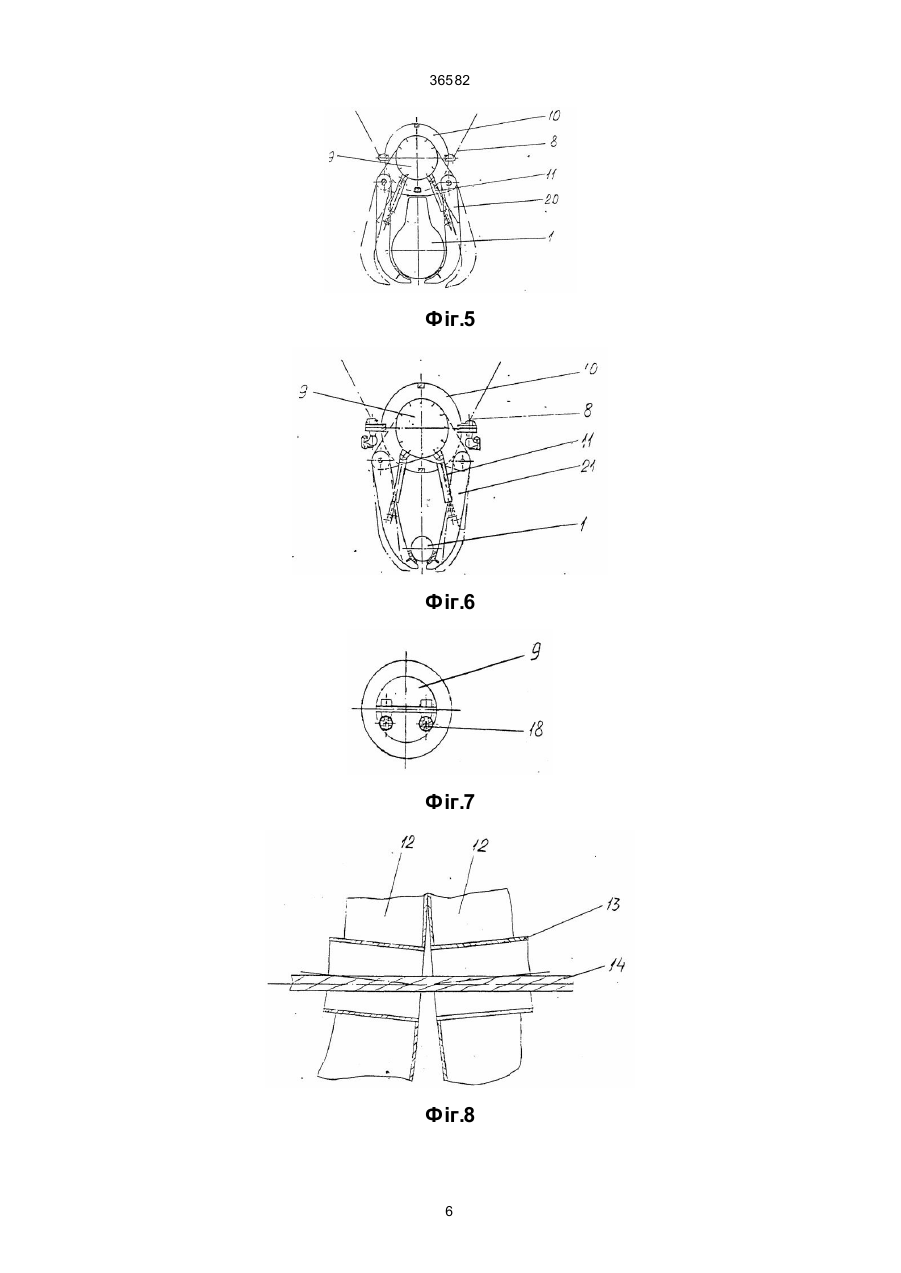
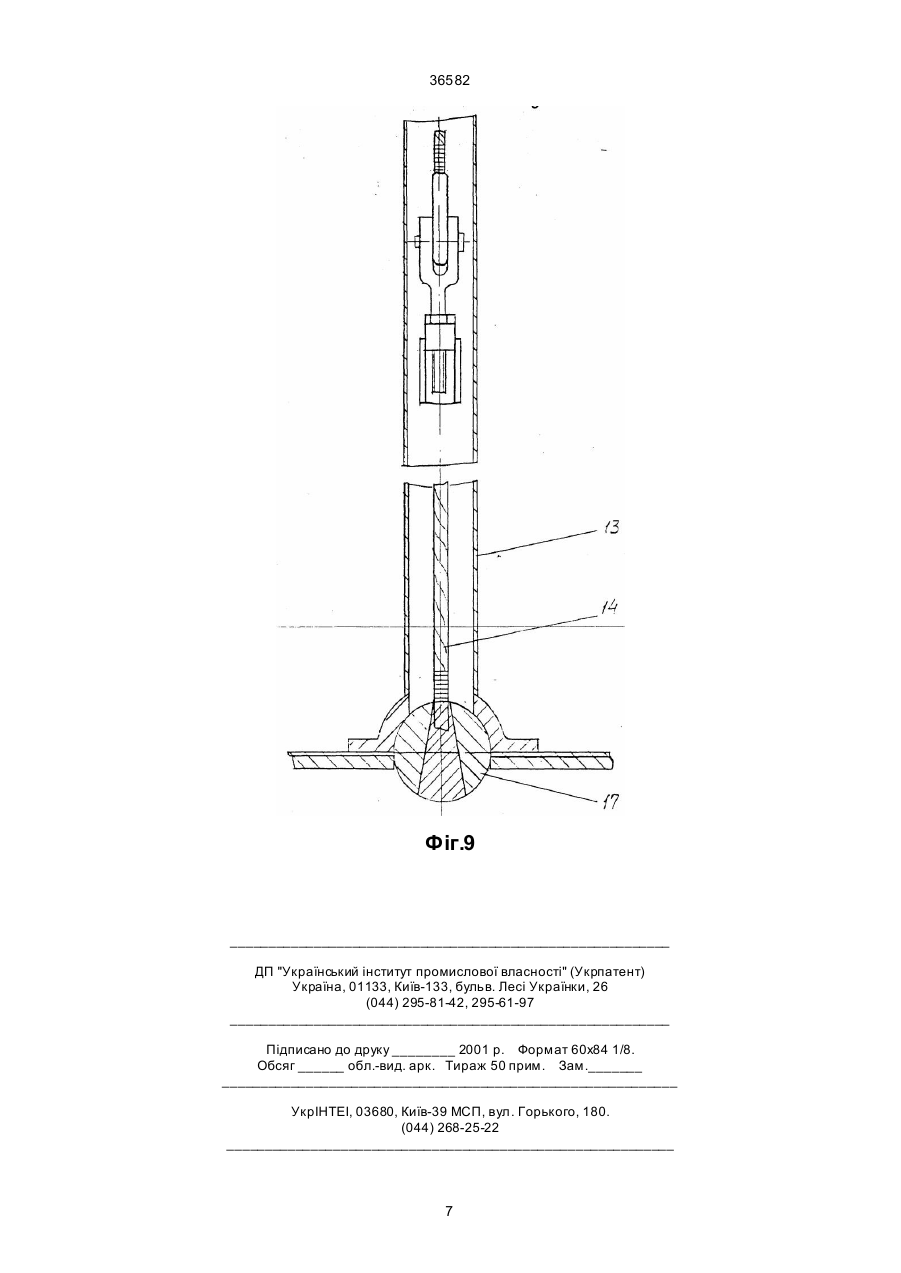
1. Пристрій для підйому затонулого об'єкта, що містить надводний плавзасіб, захоплювач і канатну систему підйому з одного або декількох тягових канатів, одні кінці яких заведені на барабани підйомних лебідок, розташованих на борту надводного плавзасобу, а інші їхні кінці сполучені з захоплювачем, при цьому тягові канати розташовані з обох бортів надводного плавзасобу, який відрізняє ться тим, що захоплювач виконаний у 36582 винаходом, ознаки й елементи: підйомні лебідки, розміщені на палубі надводного плавзасобу, і спускопідйомний пристрій, оснащений тяговим канатом і захоплювачем, причому один кінець тягового канату заведений на барабан однієї підйомної лебідки спускопідйомного пристрою, розташованого на надводному плавзасобі, а інший його кінець - пов'язаний з барабаном іншої підйомної лебідки. У основу винаходу поставлено задачу створення пристрою для підйому затонулого об'єкта, у якому застосування гнучкого керованого захоплювача забезпечує глибоководний підйом об'єкта великої маси за рахунок його надійного кріплення до захоплювача. Поставлену задачу вирішують тим, що пристрій для підйому затонулого об'єкта, що містить надводний плавзасіб, захоплювач і канатну систему підйому, один кінець тягових канатів якої заведений на барабани підйомних лебідок, розташованих на борту надводного плавзасобу, а інший їхній кінець - сполучений із захоплювачем, при цьому тягові канати розташовані з обох бортів надводного плавзасобу, відповідно до винаходу, захоплювач виконано у вигляді подовжнього ряду порожнистих понтонів, що продуваються, до яких шарнірне закріплений ряд лап для обіймання корпусу затонулого об'єкта в декількох місцях, причому лапи захоплювача сполучені з приводом, а понтони мають у тривкому корпусі наскрізні проходи, крізь які пропущений гнучкий елемент, жорстко закріплений на двох крайніх понтонах за допомогою вузлів жорсткого кріплення. Поставлену задачу вирішують також тим, що в пристрої для підйому затонулого об'єкта, відповідно до винаходу, лапи захоплювача виконані з різноманітною конфігурацією по довжині ряду порожнистих понтонів, що продуваються, таким чином, що в просвітку вони наближені до форми затонулого об'єкта, що захоплюється. Поставлену задачу вирішують також тим, що в пристрої для підйому затонулого об'єкта, відповідно до винаходу, поверхні понтонів із боку наскрізних отворів виконані у вигляді частини сфери. Сутність винаходу полягає в тому, що захоплювач виконано гнучким, а це забезпечить надійне кріплення захоплювача до затонулого об'єкта, тому що відомо, що багато глибоководних підйомів закінчувалися невдачами через відмову вузлів кріплення канатів до об'єктів підйому в період підйому затонулого об'єкта в області дії хитавиці надводного плавзасобу і хвилювання моря, а також виключить можливість поламки затонулого об'єкта в захоплювачі в процесі його підйому до поверхні води. Прийнятним за умовами задачі є тільки керований процес, коли підйом у будь-який момент можна припинити або відновити. Останнє найбільш просто вирішується за допомогою підйомних канатних систем. Перевагою понтонного методу підйому затонулого об'єкта є конструктивна простота одержання значних підйомних зусиль. Хиба відсутність керованості процесу підйому після відриву затонулого об'єкта від грунту. У канатних системах перевагою варто вважати керованість процесу підйому затонулого об'єкта, хибою - складність одержання великих підйомних зусиль. Пропонується комбінований понтонно-канатний метод підйому затонулого об'єкта, що використовує відзначені вище переваги обох засобів. Умова керованості в такій комбінованій системі потребує, щоб підйомна сила понтона була меншою за підйомну вагу затонулого об'єкта. З іншого боку, умова відриву затонулого об'єкта від грунту складається в тому, що сума підйомної сили понтона і натягу в канатній системі повинна дорівнювати підйомній вазі затонулого об'єкта з урахуванням ваги самого понтона і сил відривного опору, обумовленого зчепленням затонулого об'єкта з грунтом. Захоплювач, у якому подовжні ряди порожнистих понтонів, що продуваються, розташовані паралельно, забезпечує надійне обіймання затонулих об'єктів з декількома корпусами, наприклад, катамаранів. Пристрої на понтонах, що кермують, дозволяють надійно наводити захоплювач на затонулий об'єкт. Виконання лап захоплювача з різ-номанітною конфігурацією по довжині ряду порожнистих понтонів, що продуваються, таким чином, що в просвітку вони наближені до форми затонулого об'єкта, що захоплюється, дозволяє забезпечити надійне захоплення затонулого об'єкта, які мають різноманітну конфігурацію по довжині, і запобігає можливості поламки об'єкту при підйомі. Центральним моментом усієї концепції підйому є процес керованості підйомом, що пропонується здійснювати комбінованим засобом за допомогою понтона і підйомної канатної системи. Сутність винаходу пояснюється малюнками, на яких зображено схему пристрою, в цілому, і його елементів: - фіг.1 - пристрій для підйому затонулого об'єкта при підтягуванні захоплювача з затонулим об'єктом до надводного плавзасобу; - фіг.2 - те ж, вид збоку на захоплювач під днищем надводного плавзасобу; - фіг.З - те ж, перетин у районі мідельшпангоута, вид у корму допоміжного судна; - фіг.4 - перетин захоплювача з затонулим об'єктом у районі його носа; - фіг. 5 - перетин захоплювача з затонулим об'єктом у районі його мідель-шпангоута; - фіг. 6 - перетин захоплювача з затонулим об'єктом у районі його корми; - фіг.7 - вид на захоплювач з торця; - фіг.8 - перетин у місці з'єднання секцій у вигляді понтонів; - фіг. 9 - вузол кріплення зтяжки понтонів. Пристрій для підйому затонулого об'єкта 1, містить надводний плавзасіб 2, захоплювач 3 і канатну систему 4 підйому, один кінець 5 тягових канатів 6 якої заведений на барабани підйомних лебідок 7, розташованих на борту надводного плавзасобу 2, а інший їхній кінець 8 сполучений із захоплювачем 3, при цьому тягові канати 6 розташовані з обох бортів надводного плавзасобу 2, причому захоплювач З виконано у вигляді подовжнього ряду порожнистих понтонів 9, що продуваються, до яких шарнірно закріплено ряд лап 10 для обіймання корпусу затонулого об'єкта 1 у декількох місцях, причому лапи 10 захоплювача 3 сполучені з приводом 11, а понтони 9 мають у тривкому корпусі 12 наскрізні проходи 13, через які пропущений гнучкий елемент 14, жорстко закріплений на двох понтонах 15 і 16 за допомогою вузлів жорсткого кріплення 17. Пристрій для підйому 2 36582 затонулого об'єкта 1 містить захоплювач 3, у якому подовжні ряди порожнистих понтонів 9, що продуваються, розташовані паралельно. Пристрій для підйому затонулого об'єкта 1 містить захоплювач 3, у якому на понтонах 9 встановлені пристрої, що кермують 18. Пристрій для підйому затонулого об'єкта 1, що містить захоплювач З, лапи 10 якого виконані з різноманітною конфігурацією 19 - 21 по довжині ряду порожнистих понтонів 9, що продуваються, таким чином, що в просвітку вони наближені до форми затонулого об'єкта 2, що захоплюється. Поверхні понтонів 9 із боку отворів наскрізних проходів 13 виконані у вигляді частини сфери. Технічна можливість створення підтверджується наявністю існуючих пристроїв і, крім того, конкретним виконанням елементів пристрою: - затискні грузозахватні пристрої (див. мал.27, с.84 у книзі: Богорад А.А. Грузоподъемные и транспортные машины. - М.: Металлургия, 1989); - для підйому затонулого об'єкта з мілководдя після підйому його з глибини і транспортування відомими засобами на мілководдя можливо застосування, наприклад, пристроїв для підйому затонулих об'єктів (за а.с. СРСР № 1299895, опубл. БИ, 1987, № 12); - як швидкороз'ємні сполучні елементи, що широко відомі у підводній техніці, можна використовувати швидкодіючий сполучний пристрій байонетного типу (див. заявку Франції № 2628488, МКИ 5 F 16 В 7/20, опубл. 89.09.15, № 37), сполучний карабін (див. а.с. СРСР № 1530844, опубл. БИ, 1987, № 47) або сполучний карабін за а.с. СРСР № 1530843, опубл. БИ, 1987, № 47; - для розведення і зведення лап захоплювача пійомний засіб може бути оснащений, наприклад, гідроприводами, що складаються з гідроциліндрів, гідроакумуляторів, шлангів і іншої гідроапаратури, або кроковими електродвигунами, пов'язаними через блок керування із системою електроживлення, а через шарніри і передачу гвинта-гайки - з лапами захоплювача; - захоплювач може бути виконаний аналогічно конструкціям захоплювачів за відомими технічними рішеннями: а.с. СРСР № 718329, МКИ 5 63 С 7/20, 1978 р.; а.с. СРСР № 718329, кл. В 63 С 7/16, 1971 р.; патент США № 3722448, кл.114-55, опубл.1973 р.; патент США № 3782317, кл.114-52, опубл.1974 р. або див.: мал.8.2 на стор.170 у книзі "Аварийно-спасательные и судоподъемные средства" / А.И.Фигичев и др. - Л.: Судостроение, 1979. - 264 с.; див. також схему підводного захоплюючепідйомного пристрою американського судна спеціального призначення "Хъюз Гломар Експлорер" ( В.Шитарев. Тайна тихого океана. - С. 41 // Техника молодежи, 1992. - № 8 і мал.8.4 на стор.175 у книзі "Аварийно-спасательные и судоподъемные средства"/ А.И.Фигичев и др. - Л.: Судостроение, 1979). Як основні елементи підйомної канатної системи можуть бути використані гині, що являють собою талі (грузопідйомний пристрій із приводом різноманітного роду, що містить, як мінімум, два блоки, через які проходить канат). Безпека процесу підйому об'єкта залежить від тривкості канатної системи і надійності кріплення захоплювача до корпуса об'єкта підйому. Як надводний плавзасіб зручно використовувати бурове судно проекту 16281 (завод-будівельник судна - ХСПО, м.Херсон, розроблювач - ЦКБ "Чорноморсудопроект", м.Миколаїв), що вже обладнане засобами позиціювання. У даний час для глибин до 2500 м існує комплекс механізмів глибоководного якірного пристрою проекту 537 "Осьміног" судна-рятувальника "Ельбрус" (завод-будівельник судна - ПО "С уднобудівний завод ім. 61 Комунара", м.Миколаїв, проектант судна - За хідне ПКБ м.Санкт-Петербург), що містить транзитну лебідку ЛЕС-42 і в'юшк у ВЕС-30 за ТУ 5244-9107-72 (розроблювач - ПКБ "Прогрес", м.Миколаїв, виготовлювач лебідки - ЧСЗ, М.Миколаїв, виготовлювач в'юшки Севастопільський морський завод), використовуваних для глибоководного якірного каната діаметром 48 мм із розривним зусиллям 1400 кН за ТУ 14-4-677-76 (виготовлювач - Волгоградський канатний завод) і забезпечує такі те хнічні характеристики: - швидкість максимальна Vmах = 50 м/сек; - швидкість мінімальна Vmіn = 5 м/сек; - тягове зусилля у лебідки: на нижньому кінці каната на глибині 600 м - 364 кН : 240 кН, на глибині 2500 м - 555 кН : 430 кН, - маса лебідки без електроустаткування 39,5 т; - маса комплексу з електроустаткуванням 64,8 т. Пристрій для підйому затонулого об'єкту працює таким чином. Надводний плавзасіб 2 знаходиться в районі розташування затонулого об'єкта 1 і за допомогою системи наведення захоплювача З наводиться на затонулий об'єкт 1. Використовуючи систему позиціювання, надводний плавзасіб 2 утримується над затонулим об'єктом 1. Один кінець 5 тягових канатів 6 канатної системи 4 підйому заводиться на барабани підйомних лебідок спускопідйомного пристрою 7, розташованих на борту надводного плавзасобу 2. Інший їхній кінець 8 з'єднують із захоплювачем 3, до котрого шарнірно закріплений ряд лап 10, що сполучені з приводом 11, наприклад, гідроциліндровим. Тягові канати 6 від підйомних лебідок спускопідйомного пристрою 7, розташованих на лівому і правому бортах надводного плавзасобу 2, заводяться на захоплювач 3 під днищем надводного плавзасобу 2. Захоплювач 3 наводиться на затонулий об'єкт 1 за допомогою застосування засобів керування, рушійного комплексу, що містить пристрої, які підрулюють, 18 і засобів орієнтації під водою. Захоплювач 3 являє собою послідовно сполучені між собою порожнисті понтони 9, що продуваються, пов'язані металоконструкціями з лапами 10 захоплювача 3. Понтони 9 сполучені між собою за допомогою гнучкого елемента 14, наприклад, у вигляді троса або ланцюга, що проходить крізь наскрізні проходи 13 у тривкому корпусі 12, розташовані по центральній горизонтальній осі понтонів 9. Причому гнучкий елемент 14 жорстко закріплений на двох понтонах 15 і 16 за допомогою вузлів жорсткого кріплення 17. Після наведення захоплювача 3 на затонулий об'єкт 1 за допомогою приводу 11 зводяться лапи 10 на корпусі затонулого об'єкта 1. Потім продувають понтони 9 і вибирають кінці 5 і 8 тягових канатів 6 канатної системи 4 підйому за допомогою підйомних лебідок спускопідйомного пристрою 7, розташованих на борту надводного плавзасобу 2. 3 36582 Послідовне з'єднання понтонів 9 за допомогою гнучкого елемента 14 дозволяє реагувати канатній системі 4 підйому на виникнення різноманітного роду динамічних навантажень, викликаних хитавицею надводного плавзасобу 2 і хвилюванням моря. При цьому захоплювач 3 має, завдяки сферичній поверхні понтонів, гнучкість і може надійно підтримувати контакт із затонулим об'єктом 1 під час проведення всієї операції підйому, включаючи особливо небезпечний період підтягування затонулого об'єкта 1 до корпуса надводного плавзасобу 2 при використанні різноманітних за формою лап, наближеною до форми об'єкту, що піднімається. Таким чином, при традиційній тривкості канатної системи підвищується надійність проведення і безпека процесу підйому затонулого об'єкта за рахунок підвищення надійності кріплення захоплювача до корпусу затонулого об'єкта. Фіг.1 Фіг.2 4 36582 Фіг.3 Фіг.4 5 36582 Фіг.5 Фіг.6 Фіг.7 Фіг.8 6 36582 Фіг.9 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 7
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for lifting sunk object
Автори англійськоюBuhaienko Borys Andriiovych, Hal Anatolii Feodosiiovych
Назва патенту російськоюУстройство для подъема затонувшего объекта
Автори російськоюБугаенко Борис Андреевич, Галь Анатолий Феодосьевич
МПК / Мітки
МПК: B63C 7/04
Мітки: пристрій, затонулого, підйому, об'єкта
Код посилання
<a href="https://ua.patents.su/7-36582-pristrijj-dlya-pidjjomu-zatonulogo-obehkta.html" target="_blank" rel="follow" title="База патентів України">Пристрій для підйому затонулого об’єкта</a>
Пристрій для підйому затонулого судна
Номер патенту: 53840
Опубліковано: 17.02.2003
Автор: Іванов Павло Ілліч
МПК: B63C 7/10
Мітки: затонулого, судна, пристрій, підйому
Формула / Реферат:
Пристрій для підйому затонулого судна, що містить понтони, газогенератори для продувки понтонів, засоби захвату затонулого об’єкта, який відрізняється тим, що як понтони використовують залізничні цистерни, які на місці робіт заповнюють водою, занурюють їх під воду, прикріплюють до корпуса об’єкта, потім від суднового компресора, по повітронагнітальному шлангу, через відкритий вентиль у верхній горловині повітря подається у цистерну,...
Спосіб підйому затонулого корабля і пристрій для його реалізації
Номер патенту: 39055
Опубліковано: 15.05.2001
Автори: Бондаренко Євген Валентинович, Лівінський Олександр Михайлович, Тимофеев Микола Іванович
МПК: B63C 7/00, G01M 19/00
Мітки: корабля, реалізації, підйому, затонулого, пристрій, спосіб
Формула / Реферат:
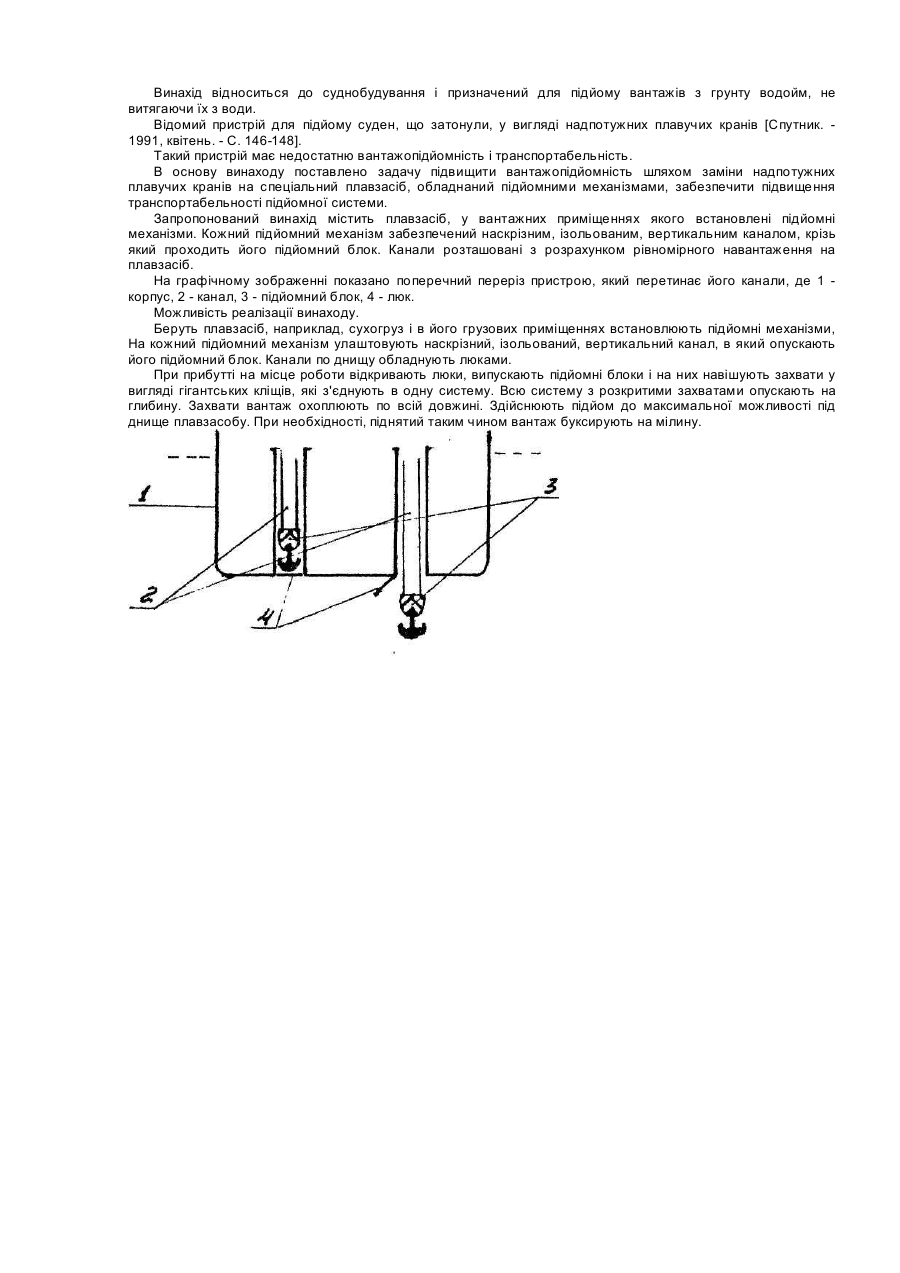
1. Спосіб підйому затонулого корабля, що включає, кріплення зв'язків, захоплювачів, трубопроводів, резервуарів, заповнення їх газом, з використанням виштовхуючої сили, який відрізняється тим, що спочатку заповнену водою систему резервуарів опускають і закріпляють до правого кінця з подальшою відкачкою води і заповненням газом, а потім заповнену водою систему опускають і закріпляють до лівого кінця, з подальшою відкачкою води і заповненням...
Пристрій для підйому вантажів з грунту водойм
Номер патенту: 23686
Опубліковано: 02.06.1998
Автор: Квач Дмитро Петрович
МПК: B63C 7/20
Мітки: грунту, пристрій, вантажів, водойм, підйому
Формула / Реферат:
Пристрій для підйому вантажів з грунту водойм, не витягаючи їх з води, що містить плавзасіб і не менше двох підйомних механізмів, який відрізняється тим, що у вантажних приміщеннях плавзасобу виконані наскрізні, ізольовані, вертикальні канали на кожний підйомний механізм.
Понтонний пристрій для підйому суден, що затонули
Номер патенту: 36984
Опубліковано: 16.04.2001
Автори: Свірідов Володимир Степанович, Кобилянський Валентин Олександрович
МПК: B63C 7/02
Мітки: пристрій, затонули, понтонний, суден, підйому
Текст:
...2 вибирають слабину вантаж ного троса до натягу, фіксують того гальмовими стопорами 3. Після цього процес опускання блока понтонів і підняття судна, що затонуло, повторюється, поки воно не опиниться усередині блока понтонів. Фіг. 1 2 36984 Фіг. 2 Фіг. 3 3 36984 Фіг. 4 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі...
Спосіб підняття затонулого об’єкта і пристрій для його здійснення
Номер патенту: 56844
Опубліковано: 15.05.2003
Автори: Галь Анатолій Феодосійович, Бугаєнко Борис Андрійович, Колодченко Юрій Володимирович
Мітки: затонулого, пристрій, підняття, здійснення, об'єкта, спосіб
Формула / Реферат:
1. Спосіб підняття затонулого об'єкта, що полягає у забезпеченні піднімальної сили модулями плавучості й у примусовому заглибленні модуля плавучості під дією сили ваги вантажа-заглиблювача по направляючому тросу, що приєднується до затонулого об'єкта і пропускається через наскрізні отвори модулів плавучості і вантажа-заглиблювача, який відрізняється тим, що вантажу-заглиблювачу додають додаткову швидкість руху за допомогою рушіїв.2....
Попередній патент: Пристрій для підігріву рідин
Наступний патент: Спосіб прогнозування ефективності лікування алкоголізму за методом о.р. довженка
Випадковий патент: Пристрій для визначення вмісту водню в металах і сплавах